Изобретение относится к технической диагностике состояния рулевого управления автотранспортных средств (АТС) и предназначено для оценки состояния рулевого управления по величине суммарного люфта в цепи рулевого управления.
Известен способ контроля люфта, который описан в способе контроля люфта в рулевом управлении транспортного средства /пат. RU №2048032, кл. G 01 М 17/06, бюл.№12, 1999/. Этот способ заключается в последовательном повороте руля в одну и другую стороны и в оценке люфта по углу поворота руля после подачи сигнала о выборке люфта, который формируется датчиком усилия руля и корректирующим блоком в виде разрешающего сигнала.
Известное устройство для контроля люфта содержит датчик угла поворота руля, блок вычисления люфта, на выходе которого установлен индикатор выбора люфта, счетчик числа измерений, дешифратор, блок вычисления люфта, пороговое устройство в виде задатчика усилия.
В способе и реализующем его устройстве точность контроля люфта руля недостаточна из-за возможных ложных показаний, связанных с состоянием смазки, загрязненностью рулевого управления, степенью его износа и величинами моментов затяжки сопрягаемых соединений контролируемой цепи. Кроме того, не предусмотрены средства, гарантирующие достоверность контроля.
За прототип заявляемому техническому решению выбран способ контроля, который описан в способе контроля люфта в рулевом управлении транспортного средства и устройство для его реализации /пат. RU и №2129712, кл. G 01 М 17/06, бюл.№12, 1999/. Известный способ заключается в последовательном повороте руля в одну и другую стороны на угол, заведомо больший люфта, содержит датчики угла поворота руля и перемещения управляемого колеса и формирует характеристику люфта по сигналам о выборке люфта, после чего люфт оценивают как суммарный угол поворота руля между указанными линейными зонами характеристики.
За прототип заявленного технического решения выбрано устройство, описанное в патенте №2129712. Известное устройство содержит датчик угла поворота руля, датчик угла поворота колеса, пороговое устройство, блок вычисления люфта, на выходе которого установлен индикатор люфта. В устройстве увеличения точности и достоверности контроля добиваются введением в устройство согласующих усилителей, блока регистров, блока указания направления поворота руля, порогового устройства, выполненного в виде компаратора, ко входу которого подключен задатчик уровня, при этом согласующие усилители установлены соответственно на выходах датчика угла поворота руля и датчика угла поворота колеса, первые выходы согласующих усилителей подключены к первому и второму входам блока регистров, второй выход согласующего усилителя датчика угла поворота руля подключен к третьему входу блока регистров, а второй выход согласующего усилителя датчика угла поворота колеса подключен к четвертому входу блока регистров через компаратор порогового устройства, при этом блок указания направления поворота подключен ко входу задатчика уровня порогового устройства, а второй выход блока регистров подключен ко входам блока вычисления люфта.
Однако в способе и устройстве прототипах точность контроля люфта недостаточна из-за влияния передаточного числа рулевого механизма на результат измерения и погрешности, вносимой влиянием величины угла поворота управляемого колеса на результат измерения.
Задачей создания изобретения является разработка способа и устройства для его реализации, позволяющих увеличить точность и достоверность результатов контроля за счет исключения влияния передаточного числа рулевого механизма и величины угла поворота управляемого колеса на измеряемый суммарный люфт рулевого управления транспортного средства.
Поставленная задача решается с помощью признаков, указанных в 1-м пункте формулы изобретения, общих с прототипом, таких как способ контроля суммарного люфта в рулевом управлении транспортного средства, заключающийся в последовательном повороте руля в одну и другую стороны на угол, заведомо больший люфта, с последующей регистрацией датчиками угла поворота руля и величины перемещения управляемого колеса и формировании характеристики люфта, после чего оценивают люфт по углу поворота руля после выборки, и отличительных существенных признаков, таких как: датчик измерения угла поворота руля устанавливают произвольно на ободе руля в плоскости его вращения, при этом перемещение управляемого колеса определяют по перемещению крайней от центра обода управляемого колеса точки в горизонтальной плоскости, принимая ее за начало отсчета люфта руля, а за окончание отсчета угла принимают перемещение этой точки в противоположную сторону на двойную величину, причем суммарный люфт рулевого управления определяют как разность угла поворота руля с начала отсчета до первого начала перемещения обода управляемого колеса за вычетом угла поворота рулевого колеса от первого до второго начала перемещения обода управляемого колеса в ту же сторону.
Особенность размещения датчика измерения угла порота руля отражена в пункте 2 формулы изобретения, а именно датчик измерения угла поворота руля фиксируют в трех точках, в произвольном месте, на ободе руля в плоскости его вращения.
Поставленная задача решается с помощью признаков, указанных в пункте 3 формулы изобретения, общих с прототипом, таких как устройство для контроля суммарного люфта в рулевом управлении транспортного средства, содержащее датчики угла поворота руля и перемещения управляемого колеса, блок вычисления люфта, на выходе которого установлен индикатор люфта, подключенные к блоку питания, и отличительных существенных признаков, таких как: блок вычисления люфта содержит последовательно подключенные аналого-цифровой преобразователь и микроконтроллер, причем выход датчика угла поворота рулевого колеса, выполненного виде гироскопа, подключен к входу аналого-цифрового преобразователя, выход которого подключен к первому входу микроконтроллера, на первый выход которого подключен индикатор люфта, а на второй выход дополнительный индикатор - пьезоизлучатель, второй вход микроконтроллера подключен к выходу датчика перемещения управляемого колеса, причем каждый элемент схемы по общей шине подключен к блоку питания, при этом устройство дополнительно снабжено коммутатором, вход которого подключен к третьему выходу микроконтроллера, а выходы подключены к драйверам интерфейса RS-232 и USB.
Вышеперечисленные признаки позволяют получить следующий технический результат: увеличение точности и достоверности результатов контроля путем исключения влияния передаточного числа рулевого механизма и величины угла поворота управляемого колеса на измеряемый суммарный люфт рулевого управления транспортного средства.
Указанные выше отличительные признаки, каждый в отдельности и все совместно, направлены на решение поставленной задачи и являются существенными. Использование предлагаемого сочетания существенных отличительных признаков в известном уровне техники не обнаружено, следовательно, предлагаемое техническое решение (способ и устройство) соответствует критерию патентоспособности «новизна».
Единая совокупность новых существенных признаков с общими, известными обеспечивает решение поставленной задачи, является неочевидной для специалистов в данной области техники и свидетельствует о соответствии заявленного технического решения критерию патентоспособности «изобретательский уровень».
Предложенный способ контроля люфта в рулевом управлении транспортного средства и устройство для его реализации поясняются следующими чертежами и схемами.
На фиг.1 приведена блок-схема устройства.
На фиг.2 приведена схема перемещения управляемых колес.
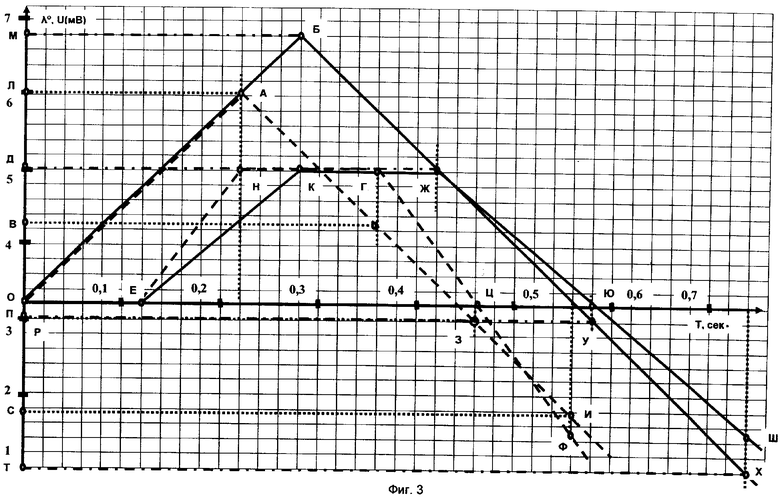
На фиг.3 приведена характеристика люфта руля как зависимость угла поворота руля от перемещения управляемого колеса при различных передаточных числах рулевого механизма, но одном и том же суммарном люфте рулевого управления.
На фиг.4 приведена характеристика люфта руля как зависимость угла поворота руля от перемещения управляемого колеса при различных значениях величины перемещения управляемого колеса, но одном и том же суммарном люфте рулевого управления.
Устройство для реализации предложенного способа (см. фиг.1) содержит датчик 1 угла поворота руля и датчик 2 перемещения обода управляемого колеса, блок вычисления люфта (включает преобразователь 3, микроконтроллер 4), на выходе которого установлен жидкокристаллический индикатор 5 люфта, блок питания 6.
Устройство снабжено последовательно подключенными аналого-цифровым преобразователем 3 и микроконтроллером 4, причем выход датчика 1 угла поворота рулевого колеса, выполненного в виде гироскопа, подключен к входу аналого-цифрового преобразователя 3, выход которого подключен к первому входу микроконтроллера 4, на первый выход которого подключен индикатор люфта 5, а на второй выход дополнительный индикатор - пьезоизлучатель 7, второй вход микроконтроллера 4 подключен к выходу датчика 2 перемещения обода управляемого колеса, при этом устройство дополнительно снабжено коммутатором 8, выходы которого подключены к драйверам интерфейса RS-232 9 и USB 10, причем каждый элемент схемы по общей шине подключен к блоку питания 6.
Пример реализации способа
Предложенный способ контроля суммарного люфта в рулевом управлении транспортного средства предусматривает последовательный поворот руля в одну и другую стороны на угол, заведомо больший люфта, с последующей регистрацией датчиками угла поворота руля и величины перемещения управляемого колеса, и формированием характеристики люфта, после чего оценивают люфт по углу поворота руля после выборки люфта.
Датчик измерения угла поворота руля устанавливают произвольно на ободе руля в плоскости его вращения, при этом начало перемещения управляемого колеса определяют по началу перемещения крайней от центра обода управляемого колеса точки в горизонтальной плоскости, принимая ее за начало отсчета люфта руля, а за окончание отсчета угла принимают начало перемещения этой точки в противоположную сторону на двойную величину, причем суммарный люфт рулевого управления определяется как разность угла поворота руля с начала отсчета до первого начала перемещения обода управляемого колеса за вычетом угла поворота рулевого колеса от первого до второго начала перемещения обода управляемого колеса в ту же сторону.
Для того чтобы исключить влияние передаточного числа рулевого механизма, точность настройки датчика перемещения управляемого колеса и нелинейность деформации резины колеса, измерение суммарного люфта необходимо осуществлять предложенным способом (см. фиг.2, 3, 4).
Известно, что угол поворота управляемого колеса меньше угла поворота рулевого колеса на передаточное число рулевого механизма, которое у разных АТС разное, и, кроме того, перемещение обода управляемого колеса необходимо осуществлять таким образом, чтобы колесо не перемещалось относительно дорожного покрытия, на котором оно установлено. Для исключения влияния нелинейности деформации резины перемещения управляемого колеса определяют по перемещению крайней от центра обода управляемого колеса точки в горизонтальной плоскости, то есть по ободу колеса, а не по перемещению резины колеса.
На фиг.2 показано направление перемещения управляемого колеса - сначала ОА, потом АБ, а затем БС - для исключения его отрыва от дорожного покрытия.
На фиг.3 показана пунктирной линией зависимость: изменение угла поворота рулевого колеса (λ) от перемещения управляемого колеса (U), при одном значении передаточного числа рулевого механизма, а сплошной линией зависимость: изменение угла поворота рулевого колеса (λ) от перемещения управляемого колеса (U), при другом (большем) значении передаточного числа рулевого механизма при одинаковой величина суммарного люфта рулевого управления транспортного средства. Причем считаем, что погрешность измерения перемещения (напряжения) управляемого колеса ЕН и ЕК, измеряемая датчиком перемещения управляемого колеса, в обоих случаях одинаковая и равна 0,15 мм, то есть при перемещении штока датчика перемещений управляемого колеса в одну и другую стороны на 0,15 мм напряжение на его выходе будет одной величины (ОД).
ОА и ОБ - изменение угла поворота руля в одну сторону, а ЕН и ЕК - изменение перемещения (U) управляемого колеса при разных передаточных числах рулевого механизма. АИ и БХ - изменение угла поворота руля в другую сторону, а ЕНГФ и ЕКВШ - изменение угла поворота (U) управляемого колеса при разных передаточных числах рулевого механизма. Причем вращение рулевого колеса в другую сторону осуществляем до изменения перемещения управляемого колеса на двойную величину (ГЦ, ЦФ и ЖЮ, ЮШ).
После этого вычитаем из полученной величины угла (ЛР) после первого начала перемещения управляемого колеса приращение угла РС, полученное после второго измерения, и получим ЛВ, то есть истинное значение суммарного люфта руля. Аналогично для другого передаточного числа рулевого механизма:
МП-ПТ=МД
Полученные результаты ЛВ и МД равны, то есть, осуществляя измерения изложенным способом, мы исключаем влияние передаточного числа рулевого механизма на результат измерения суммарного люфта в рулевом управлении.
На фиг.4 пунктирной линией показана зависимость: изменение угла поворота рулевого колеса (λ) от перемещения управляемого колеса (U), при одном его значении, а сплошной линией - эта же зависимость при другом (большем) значении величины перемещения управляемого колеса, то есть при разных чувствительностях датчика перемещений колеса, но при одинаковых передаточных числах рулевого механизма и суммарном люфте.
ОА и ОБ - изменение угла (λ) поворота руля в одну сторону, а ЕН и ЕК - изменение (например, напряжения) перемещения (U) управляемого колеса при разных чувствительностях датчика перемещения управляемого колеса.
АИ и БХ - изменение угла (λ) поворота руля в другую сторону, а НГФ и КЖШ - изменение перемещения (U) управляемого колеса при разных чувствительностях датчика перемещения управляемою колеса. Причем вращение рулевого колеса в другую сторону осуществляем до тех пор, пока измеряемая величина перемещения управляемого колеса, измеряемая каким-то чувствительным элементом, не будет измерена дважды (ГЦ, ЦФ и ЖЮ, ЮШ).
После этого вычитаем из полученной величины угла поворота руля после первого измерения ЛР приращение угла РС, полученное после второго измерения, и получим ЛВ, то есть истинное значение суммарного люфта руля ЛВ. Аналогично для другой чувствительности датчика перемещения управляемого колеса получим:
МП-ПТ=МД
Полученные результаты ЛВ и МД, как видно из графика, равны, то есть, осуществляя измерения изложенным способом, мы исключаем влияние разброса чувствительности датчика перемещений (у разных датчиков измерения перемещения управляемого колеса существует разброс от 0,1 мм до 0,18 мм) управляемого колеса на результат измерения суммарного люфта в рулевом управлении.
Следовательно, для получения точного значения суммарного люфта рулевого управления АТС необходимо его измерения осуществлять описанным выше способом.
Способ реализован в приборе, названном авторами «ВИРАЖ», для проверки рулевого управления легковых и грузовых автомобилей. Датчик угла поворота руля 1 устанавливался на ободе руля в плоскости его вращения в удобном месте, а датчик перемещения управляемого колеса 2 устанавливался к ободу управляемого колеса в крайней от его центра точке в горизонтальной плоскости. После чего произведен последовательно поворот руля влево до перемещения обода колеса, а затем вправо на двойную величину перемещения обода колеса. Сформирована характеристика люфта как разность угла поворота руля с начала отсчета до первого перемещения обода управляемого колеса за вычетом угла поворота рулевого колеса от первого до второго перемещения обода управляемого колеса в ту же сторону. После чего был определен суммарный люфт рулевого управления.
Установлено, что на автомобиле ВАЗ-2105 с передаточным числом рулевого механизма 16,4 и при работающем двигателе в процессе контроля при перемещении обода управляемого колеса влево на 0,15 мм и после этого вправо дважды но 0,15 мм колесо не отрывается от дорожного покрытия, а суммарный люфт равен 1,84 градуса, что соответствует суммарному углу поворота руля на характеристике люфта.
На грузовом автомобиле ЗИЛ-157КД с передаточным числом рулевого механизма 23,5 и при работающем двигателе в процессе контроля при перемещении обода управляемого колеса влево на 0,15 мм и после этого вправо дважды по 0,15 мм колесо не отрывается от дорожного покрытия, а суммарный люфт равен 14,04 градуса.
Устройство для реализации способа работает следующим образом. При повороте руля влево от положения «езда прямо» в кинематической цепи рулевого управления выбирается сначала люфт (см. участок ОЕ на фиг.3 и фиг.4). Отсутствие в рулевом управлении идеальных зазоров из-за наличия смазки, загрязнения, наличия контактов деталей по необработанным поверхностям и моментов затяжки сопрягаемых соединений приводит к незначительному сдвигу управляемого колеса в начале контроля. При дальнейшем повороте руля в ту же сторону крутизна наклона характеристики перемещения управляемого колеса увеличивается (см. участок ЕН и ЕК на фиг.3 и 4), причем, чем больше передаточное число рулевого механизма, тем меньше крутизна (крутизна участка ЕК меньше ЕН на характеристике). Это свидетельствует о выборке люфтов в сопрягаемых соединениях и начале перемещения обода управляемого колеса, то есть происходит изменение сигнала (напряжения) на датчике 2 перемещения колеса. Это напряжение поступает на второй вход микроконтроллера 4. На первый вход микроконтроллера поступает оцифрованный аналого-цифровым преобразователем 3 сигнал с датчика 1 угла поворота руля.
При перемещении обода колеса на 0,15 мм напряжение на втором входе микроконтроллера достигнет величины 20 мВ. При этом микроконтроллер 4 выработает команды: первая запомнит новое угловое положение по первому входу датчика 1 руля и примет его за начало отсчета; вторая по входу (2) датчика 2 перемещения колеса запомнит его новое значение напряжения; третья по выходу 1 изменит надпись на индикаторе «Повернуть вправо»; четвертая по выходу 2 выработает кратковременный сигнал и пьезоизлучатель 7 подаст звуковой сигнал. Теперь вращаем руль вправо до тех пор, пока не начнет перемещаться обод управляемого колеса вправо, то есть напряжение на втором входе микроконтроллера 4 не изменится, например, на 20 мВ, что пропорционально перемещению крайней точки обода управляемого колеса на величину, например, 0,15 мм. При этом микроконтроллер 4 выработает команды: первая запомнит по первому входу датчика 1 руля угол λ1, на который повернули руль вправо; вторая по входу 2 датчика 2 перемещения колеса запомнит его новое значение напряжения; третья по выходу 1 изменит надпись на индикаторе «Угол руля». Продолжаем вращать руль в том же направлении (вправо) до тех пор, пока напряжение на втором входе микроконтроллера 4 не изменится, например, на 20 мВ, что пропорционально перемещению крайней точки обода управляемого колеса вправо еще на величину, например, 0,15 мм. При этом микроконтроллер 4 выработает команды: первая запомнит по первому входу датчика 1 руля угол λ2, на который повернули руль вправо от первого до второго перемещения датчика 2 колеса; вторая осуществит вычитание из первоначально запомненного угла поворота руля второе его значение, то есть λ=λ1-λ2; третья по выходу 1 изменит надпись на индикаторе, отобразив полученный суммарный угол λ рулевого управления, например, «Люфт руля 12,47°»; четвертая по выходу 2 выработает кратковременный сигнал и пьезоизлучатель 7 подаст звуковой сигнал. Таким образом произведено измерение суммарного люфта рулевого управления транспортного средства.
Вышеприведенные примеры свидетельствуют о промышленной применимости предлагаемого технического решения.
Технико-экономический эффект предложенного способа и устройства для его реализации заключается в увеличении точности контроля в 2,5 раза и производительности в 1,5 раза по сравнению с известными при одновременном повышении достоверности контроля.


Изобретение относится к способу контроля суммарного люфта в рулевом управлении транспортного средства и устройству для его реализации. Способ контроля суммарного люфта в рулевом управлении транспортного средства заключается в последовательном повороте руля в одну и другую стороны на угол, заведомо больший люфта, с последующей регистрацией датчиками угла поворота руля и величины перемещения управляемого колеса и формировании характеристики люфта, после чего оценивают люфт по углу поворота руля после выборки. Датчик измерения угла поворота руля устанавливают произвольно на ободе руля в плоскости его вращения, при этом перемещение управляемого колеса определяют по перемещению крайней от центра обода управляемого колеса точки в горизонтальной плоскости, принимая ее за начало отсчета люфта руля, а за окончание отсчета угла принимают перемещение этой точки в противоположную сторону на двойную величину. Суммарный люфт рулевого управления определяют как разность угла поворота руля с начала отсчета до первого начала перемещения обода управляемого колеса за вычетом угла поворота рулевого колеса от первого до второго начала перемещения обода управляемого колеса в ту же сторону. Датчик измерения угла поворота руля фиксируют в трех точках, в произвольном месте, на ободе руля в плоскости его вращения. Устройство для контроля суммарного люфта в рулевом управлении транспортного средства содержит датчики угла поворота руля и перемещения управляемого колеса, блок вычисления люфта, на выходе которого установлен индикатор люфта, подключенные к блоку питания. Блок вычисления люфта содержит последовательно подключенные аналого-цифровой преобразователь и микроконтроллер, причем выход датчика угла поворота рулевого колеса, выполненного в виде гироскопа, подключен к входу аналого-цифрового преобразователя, выход которого подключен к первому входу микроконтроллера, на первый выход которого подключен индикатор люфта, а на второй выход - дополнительный индикатор - пьезоизлучатель, второй вход микроконтроллера подключен к выходу датчика перемещения управляемого колеса, причем каждый элемент схемы по общей шине подключен к блоку питания. Устройство имеет коммутатор, вход которого подключен к третьему выходу микроконтроллера, а выходы подключены к драйверам интерфейса RS-232 и USB. Технический результат заключается в повышении точности и достоверности результатов. 2 н. и 1 з.п. ф-лы, 4 ил.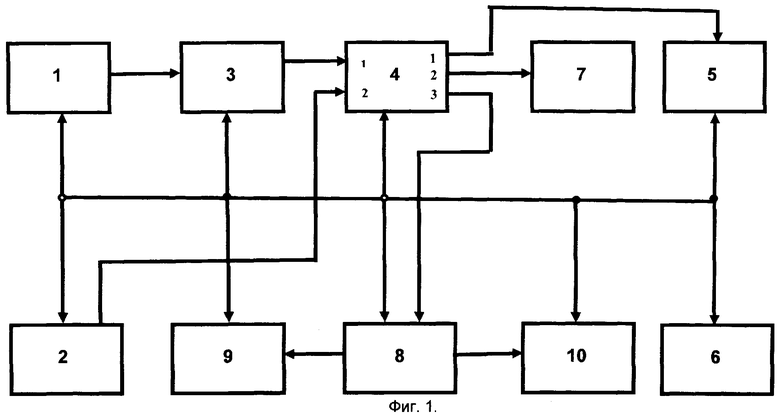
| СПОСОБ КОНТРОЛЯ ЛЮФТА В РУЛЕВОМ УПРАВЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1998 |
|
RU2129712C1 |

