Предлагаемое изобретение относится к способам технической диагностики рулевого управления транспортных средств и может быть применено при эксплуатации автомобилей.
Известен способ контроля люфта рулевого управления (пат. RU №2048032, кл. G 01 M 17/06, 11, 1995), который заключается в последовательном повороте руля в одну и другую стороны и в оценке люфта по углу поворота руля после подачи сигнала о выборке люфта, который формируется датчиком усилия, прикладываемого к рулевому колесу, и корректирующим блоком в виде разрешающего сигнала. Недостатком этого способа является то, что точность показаний люфта недостаточна из-за возможных ложных показаний, связанных с состоянием смазки, загрязненностью рулевого управления, степенью его износа и величинами моментов затяжки сопряженных соединений контролируемой цепи.
За прототип предлагаемого изобретения “Способ контроля люфта рулевого управления транспортного средства” выбран способ (пат. RU №2129712, С1, кл. G 01 М 17/06, 04, 1999), заключающийся в том, что производят поворот руля последовательно в одну и в другую стороны на угол, больший люфта, затем формируют характеристику люфта как зависимость перемещения управляемого колеса от угла поворота руля, имеющую перед линейными зонами передаточного отношения рулевого управления нелинейные зоны деформации, начала которых фиксируют как углы поворота руля в одну и другую стороны в моменты страгивания колеса, а окончания зон деформации задают углами поворота и соответствующими им перемещениями управляемого колеса в одну и другую стороны, по которым формируют сигналы о выборке люфта в одну и другую стороны, после чего люфт оценивают как суммарный угол поворота руля между указанными линейными зонами характеристики.
Недостатком этого способа является нестабильность и сложность формирования сигналов о выборке люфта, а также то, что в величину люфта полностью включаются нелинейные зоны, лишь частично имеющие в своем составе скрытые люфты, что ведет к завышению результатов замера. Кроме того, требование подпункта 5.2.3.2 пункта 5.2. “Методы проверки рулевого управления” действующего ГОСТ Р51709-2001 предписывает определение границ люфта по моменту начала поворота управляемых колес. В приведенном выше способе это требование не выполняется.
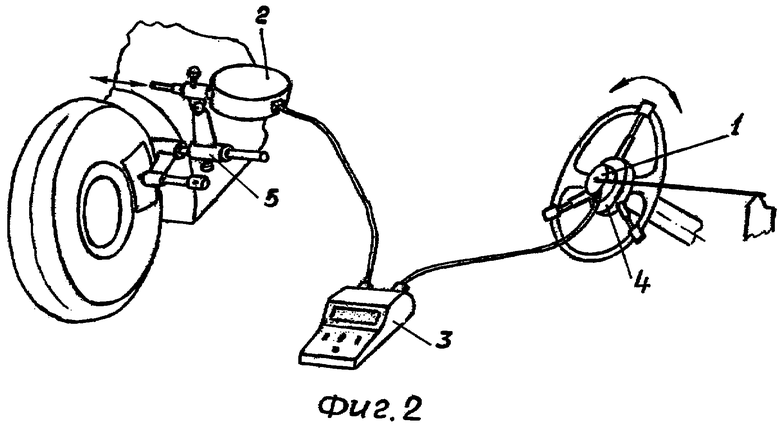
В основу предлагаемого способа определения свободного хода (люфта) рулевого управления положено то, что (см. фиг.1) углы наклона α линейных ветвей характеристики передаточного отношения конкретного рулевого управления, а также соответствующие им коэффициенты, пропорционально связывающие угловые смещения руля и испытываемого переднего колеса, постоянны в секторе угла возможного разброса величин люфтов руля и практически не зависят от степени износа деталей рулевого управления. С повышением износа увеличивается расстояние б1-б2 между линейными ветвями характеристики передаточного отношения рулевого управления, соответствующее угловой величине люфта (или свободного хода) руля. Линия О1-О-О2 характеризует идеальное безлюфтовое рулевое управление. Углы наклона α линейных ветвей, соответствующие коэффициенту передаточного отношения, показаны условно для пояснения сущности процессов и при определении угловой величины люфта руля используется только их наличие и пропорциональная связь с коэффициентом, но не величина.
В основу способа также положено то, что:
1) смещение переднего колеса на величину OК1 (OK2 при смещении в другую сторону) по координате Y линейного смещения колеса не зависит от положения начал нелинейных зон передаточного отношения рулевого управления (a1, T1 или соответственно в другую сторону а2, Т2 и т.п.);
2) при этом смещении OК1 (OK2) изменяется пространственное положение люфта руля, при его линейном смещении на величину OК1 (OK2 при смещении в другую сторону) в точку л1 левого (в точку л2 правого) края его угловое смещение соответствует положению рулевого колеса точкам д1 (левого) или д2 (правого) углового смещения;
3) при снятии усилия руля переднее колесо и люфт остаются с остаточным смещением ОЦ1 (ОЦ2), превышающим составляющую г1-ж1 (г2-ж2) линейного смещения нелинейных зон;
4) возврат в исходное положение переднего колеса и люфта происходит с поглощением попутной правой р1-с1 (или левой р2-с2) нелинейной зоны с нахождением его правого края в точке б2 (левого в точке б1). Угловое положение руля на координате Х его углового смещения при этом также соответствует этим точкам. При этом левая нелинейная зона ж1-т1 (или правая т2-ж2) увеличивается. В скобках указан вариант начального смещения в противоположную сторону.
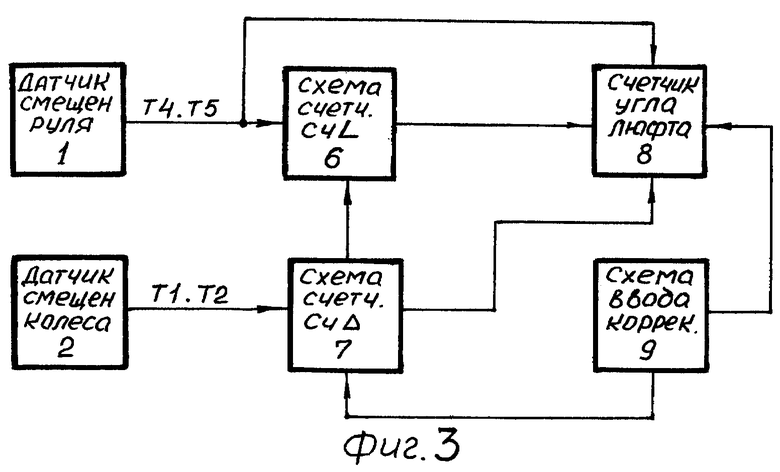
На фиг.2 показано устройство реализации способа, где на рулевом колесе с помощью самоцентрирующегося захвата 4 установлен реверсивный датчик 1 дискретных импульсов углового смещения руля (далее датчик углового смещения руля), а на переднем испытываемом колесе установлен с помощью механического приспособления 5 реверсивный датчик 2, контролирующий угловое вращение переднего колеса вокруг вертикальной оси при его смещении пропорциональным ему линейным смещением относительно корпуса автомобиля на радиусе установки датчика. Такой метод контроля смещения переднего колеса, принятый в способе, значительно повышает его разрешающую способность и чувствительность (до долей угловых минут). Датчик углового смещения руля выдает в зависимости от направления вращения руля дискретные импульсы его углового смещения Т4 и Т5, разделенные по направлениям вращения (линия П1 фиг.1), а датчик смещения переднего колеса - дискретные импульсы его смещения Т1 и Т2, так же разделенные (линия В1 фиг.1). Так же как направления смещения руля и переднего колеса взаимосвязаны между собой, так же согласовано и появление импульсов - импульсы Т1 могут появиться только при наличии импульсов Т4, а Т2 только с Т5. Импульсы углового смещения руля Т4 и Т5 могут быть при отсутствии Т1 и Т2 при выборке чистого люфта (участок а1-а2 фиг.1) или скрытых люфтов нелинейных зон а1-г1 или а2-г2 (фиг.1), когда угловое смещение руля происходит без смещения переднего испытываемого колеса (см. ниже). Дискретная информация датчиков угловых и линейных смещений регистрируется, обрабатывается с выдачей сигналов управления в схемах счетчиков углового смещения руля и линейного смещения переднего колеса (далее по тексту счетчик СчL и счетчик СчΔ соответственно), расположенных в блоке управления и регистрации 3 (фиг.2). Здесь же находится счетчик (8 фиг.3) вычисления угла люфта руля и схема ввода коррекции (9 фиг.3), компенсирующей погрешность его измерения от наличия собственных люфтов датчиков углового и линейного смещений.
Функционирование способа заключается в следующем:
При вращении руля из исходного положения прямолинейного движения (приблизительно точка О фиг.1) после выборки угла чистого люфта (без смещения переднего колеса) достигается в точке а1 координаты Х углового смещения руля начало нелинейной зоны а1-г1 (или а2-г2 при вращении в другую сторону фиг.1), с которой начинается смещение переднего испытываемого колеса (с датчиком смещения) с фиксированием величины этого смещения в счетчике СчΔ (линия В2 фиг.1) по импульсам Т1 его датчика 2 (линия В1 фиг.1). На участке нелинейной зоны а1-г1 взаимное смещение руля и переднего испытываемого колеса не соответствует коэффициенту передаточного отношения рулевого управления, его действие восстанавливается в точке ж1 после выборки скрытых люфтов а1-б1 (линия П3 фиг.1) и линейной составляющей б1-г1 (линия П4 фиг.1) со смещением переднего колеса и люфта на величину г1-ж1. Левая нелинейная зона при этом поглощается (исчезает), правая сохраняется с увеличением ее скрытых люфтов. Вращением руля переднее испытываемое колесо смещается на контролируемую в счетчике СчΔ величину OК1 (линия В2 фиг.1), который выдает при ее достижении потенциальный электрический (световой для оператора) сигнал об угловом смещении руля на величину, большую люфта. При этом люфт займет новое пространственное положение с угловым смещением его левого края в точку л1, соответствующее точке д1 координаты Х углового смещения руля и линейным смещением на величину OК1 с сохранением своей истинной угловой величины, ограниченной линейными ветвями характеристики передаточного отношения и равной углу б1-б2. При этом смещение люфта в точку л1 жестко связано с линейным смещением OК1, величина которого не зависит от положения точки начала нелинейной зоны на координате Х (a1, T1 и тому подобные). При изменении направления вращения руля в точке д1 (координаты Х углового смещения руля), соответствующей отработке контролируемого смещения OК1 и снятии усилия смещения с переднего колеса, оно и люфт сместятся в сторону исходного положения на какую-то величину к1-ц1 (фиг.1) под действием сил упругой деформации шины колеса и деталей рулевого управления (линия В3 фиг.1) с остаточным смещением ОЦ1 (линия В4 фиг.1) от предыдущего силового воздействия руля и с образованием левой нелинейной зоны и1-м1. Основным критерием величины контролируемого смещения OК1, равного ОК2, является то, чтобы величина остаточного смещения О1-Ц1 (или О2-Ц2 при следующем цикле) была больше линейной составляющей г1-ж1 (или г2-ж2).
На участке л1-и1 обратное угловое смещение руля сопровождается пропорциональным ему смещением переднего колеса и люфта, которое нарушается на участке левой нелинейной зоны и1-м1, далее от точки м1 до точки р1 вращение руля происходит с выборкой чистого свободного хода (люфта) без линейного смещения переднего колеса и люфта, которое начинается при отработке правой нелинейной зоны р1-с1 с ее поглощением в точке с1 и выходом правого края смещенного люфта на линейную ветвь характеристики передаточного отношения рулевого управления.
При этом смещение из точки и1 по линии и1-б1 не может состояться, т.к. усилие выборки нелинейных зон и чистого свободного хода на участке от точки и1 до с1 значительно меньше усилия, требуемого для смещения испытываемого колеса по траектории и1-б1.
При этом обратное смещение переднего колеса сопровождается выдачей его датчиком 2 (фиг.2) дискретных импульсов Т2, которые вычитаются из числа в реверсивном счетчике СчΔ (линия В3 и В4 фиг.1), обнуление которого означает возврат переднего колеса и люфта в исходное положение с нахождением его правого края в точке б2 (с левой увеличенной нелинейной зоной т1-ж1). По сигналу обнуления счетчика СчΔ (7 фиг.3) включается в работу реверсивный счетчик СчL (6 фиг.3) контроля углового смещения руля, в котором запоминается положение точки б2 начала диапазона люфта (привязка ее к угловому смещению руля) и начинается без изменения направления вращения руля отработка второго контролируемого смещения ОК2, с регистрацией его в счетчике СчΔ по импульсам дискретного перемещения (линия В5 фиг1.) со смещением переднего колеса на величину ОК2 со смещением правого края люфта в точку л2, при этом в счетчике контроля углового смещения руля СчL по импульсам Т5 датчика углового смещения (линия П5 фиг.1) зафиксируется угол б2-д2, соответствующий этому смещению ОК2. При изменении направления вращения руля в точке д2 на вход вычитания этого реверсивного счетчика СчL начнут поступать импульсы Т4 (вместо Т5), которые приведут счетчик в нулевое состояние в точке б2 (возврат в начальную точку диапазона угла люфта), по которому вырабатывается сигнал включения в работу счетчика угла люфта (8 фиг.3) и начинается отсчет его величины по импульсам Т4 датчика углового смещения руля (линия П7 фиг.1). Обратное смещение переднего испытываемого колеса и люфта из точки л2 идет (аналогично смещению из точки л1) по траектории л2-и2-м2-р2-с2-б1 с поглощением левой нелинейной зоны с2-р2 в точке с2 и увеличением правой. При этом на вход вычитания реверсивного счетчика СчΔ контроля величины смещения переднего колеса начнут поступать импульсы Т1 (вместо Т2) реверсивного датчика 2 (фиг.3) контроля его смещения (линия В6 и В7 фиг.1). Обнуление счетчика наступит в точке б1 в момент возврата переднего колеса в исходное положение с нахождением левого края люфта в точке б1 с поглощенной левой нелинейной зоной (и увеличенной правой т2-ж2), а точка б1 фиксируется как конечная точка углового диапазона люфта. При этом счетчиком СчΔ выработается сигнал окончания цикла измерения, по которому заканчивается счет угла люфта в счетчике 8 (фиг.3), где зафиксирована угловая величина люфта, равная его истинной величине б1-б2 (линия П7 фиг.1), и начинается новый, следующий цикл измерения (линия П8, П9, П10), аналогичный приведенному выше. При этом превышения контролируемых смещений, например, OК1 на величину к1-ф1 не влияют на точность измерений, т.к. это превышение и соответствующее ему угловое смещение д1-е1 суммируются соответственно с числом в счетчике СчΔ (линия В2 фиг.1) и счетчике СчL (линия П8 фиг.1). Для счетчика СчL это суммирование происходит, когда в нем зарегистрирована угловая величина, соответствующая контролируемому смещению (б1-д1 или б2-д2).
Способ предусматривает компенсацию погрешности измерений люфта руля, вызванной наличием собственных люфтов датчиков углового смещения руля и переднего испытываемого колеса.
Из фиг.1 следует, что из-за собственного люфта датчика 1 (фиг.2) угловых смещений руля при изменении его направления вращения (смена импульсов Т4 на Т5 или наоборот) обнуления счетчика СчL (линия П5 и П6 или П8 и П9) произойдет на величину собственного люфта датчика позднее, на столько же уменьшится результат замера угловой величины люфта. Для устранения этой погрешности в каждом цикле измерений известная (паспортная) величина собственного люфта датчика угловых перемещений руля вносится в счетчик вычисления величины люфта (8 фиг.3) и прибавляется к результату замера, восстанавливая его истинность. Аналогично, собственный люфт датчика 2 (фиг.2) смещения переднего колеса при смене направления его перемещения (смена импульсов Т1 на Т2 или наоборот) ведет к более позднему обнулению счетчика СчΔ (линия В4 или В7), смещению точки б2 (или б1 в другом цикле) и завышению замера. Эта погрешность устраняется уменьшением реальных величин зафиксированных в счетчике СчΔ смещений OК1 и ОК2 на величину собственного люфта датчика, что также восстанавливает истинность замера. Коррекция погрешности от собственных люфтов датчиков вводится схемой коррекции 9 (фиг.3) в начале каждого цикла измерений и предшествует всем остальным операциям.
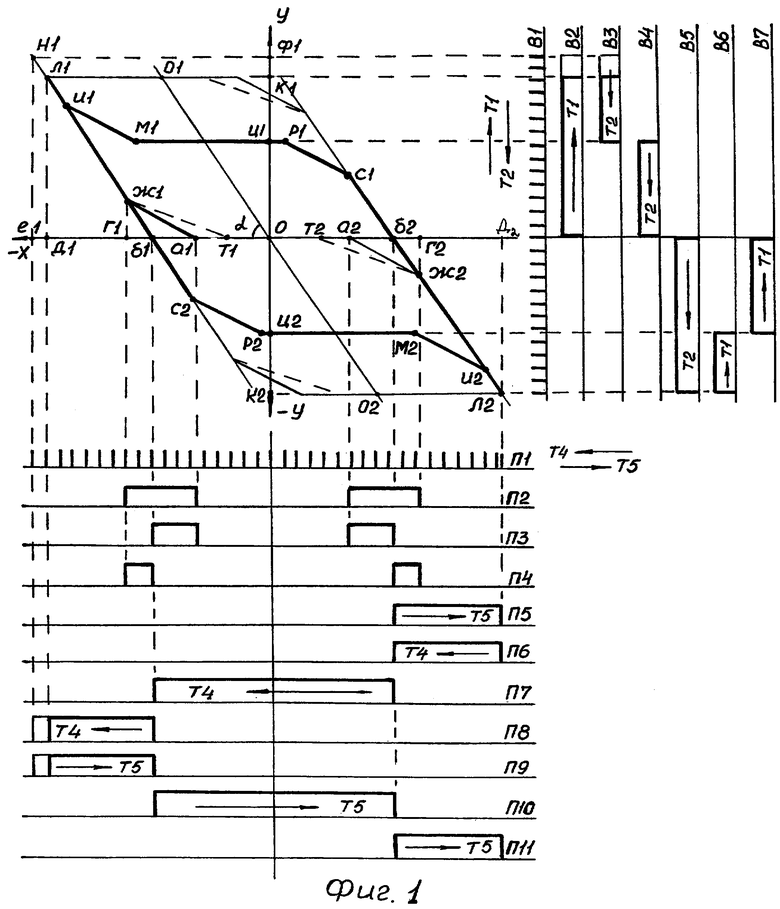
На фиг.3 приведена блок-схема способа, где
1 - реверсивный датчик контроля смещения руля,
2 - реверсивный датчик контроля смещения переднего испытываемого колеса,
6 - схема счетчика СчL контроля величины углового смещения руля,
7 - схема счетчика СчΔ контроля линейного смещения переднего испытываемого колеса,
8 - схема счетчика вычисления величины люфта руля,
9 - схема ввода коррекции на собственные люфты датчиков.
Схемы 6-9 находятся в блоке 3 управления и регистрации (фиг.2).
Технический результат предлагаемого способа заключается в повышении точности контроля люфта и стабильности результатов измерений за счет использования реверсивных датчиков дискретных перемещений и построения блока управления на схемах цифровой обработки информации, позволяющих компенсировать погрешность измерений, вызванных наличием собственных люфтов датчиков. Способ реализован в конструкции на основе ранее заявленного “Устройства технической диагностики транспортных средств” (заявка №2002100029 от 04 января 2002 года) этих же авторов с корректировкой схемных решений по способу измерения углового люфта руля и изменением дискретности датчика угловых смещений с 0,5 угловых градуса /дискрету до 0,1 угловых градуса/ дискрету.
Контрольная проверка проводилась при измерении свободного хода рулевого колеса легковых автомобилей ВАЗ-2109 и Москвич “М-412” с параллельным инструментальным замером с использованием самодельной угловой шкалы диаметром 400 мм, укрепленной соосно с рулевым колесом, и индикатора ИЧ-10 для контроля смещения переднего колеса. Производилось искусственное изменение величины люфта за счет регулировки зазора червячной пары редуктора рулевого механизма автомобиля “М-412”. Средние результаты замеров примерно совпали с отклонением их от средней величины на ±0,2-0,3 градуса по способу и на ±1,0 градус и более по инструментальному замеру (по моментам смещения переднего колеса ≈0,05-0,08 мм по индикатору ИЧ-10, установленного на крепежном устройстве датчика линейного смещения переднего колеса), что объясняется трудностью объективной оценки величины угла по шкале и момента смещения колеса по индикатору.
Изобретение относится к технической диагностике состояния рулевого управления транспортных средств по величине углового люфта рулевого колеса. Способ контроля люфта в рулевом управлении транспортного средства заключается в том, что производят поворот руля в обе стороны из исходного положения на угол, больший люфта, с остаточным смещением переднего испытываемого колеса, а по моментам возвращения его в исходное положение формируют угловой диапазон люфта с привязкой его к угловому смещению руля, после чего люфт оценивают величиной угла, измеренного между границами углового диапазона. Технический результат - повышение точности контроля. 3 ил.
Способ контроля люфта в рулевом управлении транспортного средства, заключающийся в повороте руля из исходного положения прямолинейного движения последовательно в одну и другую стороны на угол, больший люфта, отличающийся тем, что вводят коррекцию погрешности угловых и линейных измерений, поочередно сдвигают переднее испытываемое колесо на контролируемые величины с его остаточными смещениями после снятия усилия руля, возвращают переднее испытываемое колесо с поглощением встречных нелинейных зон передаточного отношения рулевого управления в исходное положение, моменты достижения которого фиксируют как границы углового диапазона люфта и связывают их с угловым смещением руля, после чего люфт оценивают углом, измеренным между границами его углового диапазона.
| СПОСОБ КОНТРОЛЯ ЛЮФТА В РУЛЕВОМ УПРАВЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1998 |
|
RU2129712C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВРЕМЕНИ КОРРЕКЦИИ ВСКРЫТИЯ ИЛИ ОТДЕЛЕНИЯ ГОЛОВНОЙ ЧАСТИ РАКЕТЫ | 2008 |
|
RU2400699C2 |
| US 3889527 A, 17.06.1975 | |||
| БЛОК ДЛЯ ТРАНСПОРТИРОВКИ КАТУШЕК | 2020 |
|
RU2801855C1 |

