Предлагаемое изобретение относится к способам технической диагностики рулевого управления транспортных средств и может быть применено при эксплуатации автомобилей.
Известен способ контроля люфта рулевого управления (пат. RU №2048032, кл. G 01 M 17/06, 11, 1995), который заключается в последовательном повороте руля в одну и другую стороны и в оценке люфта по углу поворота руля после подачи сигнала о выборке люфта, который формируется датчиком усилия, прикладываемого к рулевому колесу и корректирующим блоком в виде разрешающего сигнала. Недостатком этого способа является то, что точность показаний люфта недостаточна из-за возможных ложных показаний, связанных с состоянием смазки, загрязненностью рулевого управления, степенью его износа и величинами моментов затяжки сопряженных соединений контролируемой цепи.
За прототип предлагаемого изобретения “Способ измерения люфта рулевого управления транспортного средства” выбран способ (пат RU №2129712 С1, кл. G 01 M 17/06, 04, 1999), заключающийся в том, что производят поворот руля последовательно в одну и в другую стороны на угол, больший люфта, затем формируют характеристику люфта как зависимость перемещения управляемого колеса от угла поворота руля, имеющую перед линейными зонами передаточного отношения рулевого управления нелинейные зоны деформации, начала которых фиксируют как углы поворота руля в одну и другую стороны в моменты страгивания колеса, а окончания зон деформации задают углами поворота и соответствующими им перемещениями управляемого колеса в одну и другую стороны, по которым формируют сигналы о выборке люфта в одну и другую стороны, после чего люфт оценивают как суммарный угол поворота руля между указанными линейными зонами характеристики.
Недостатком этого способа является нестабильность и сложность формирования сигналов о выборке люфта, а так же то, что в величину люфта полностью включаются нелинейные зоны, лишь частично имеющие в своем составе скрытые люфты, что ведет к завышению результатов замера. Кроме того требование подпункта 5.2.3.2 пункта 5.2. “Методы проверки рулевого управления” действующего ГОСТ Р51709-2001 предписывает определение границ люфта по моменту начала поворота управляемых колес. В приведенном выше способе это требование не выполняется.
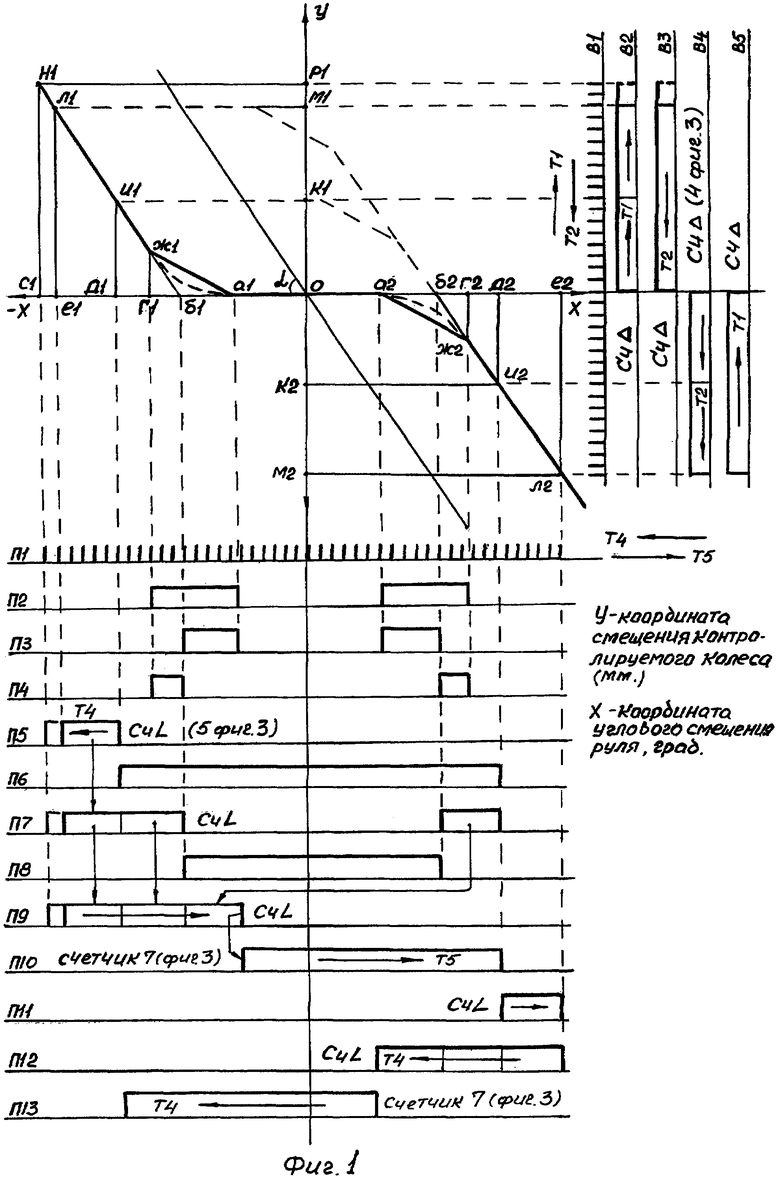
В основу предлагаемого способа определения свободного хода (люфта) рулевого колеса положено то, что (см. фиг.1) углы наклона α линейных ветвей характеристики передаточного отношения конкретного рулевого управления, а также соответствующие им коэффициенты, пропорционально связывающие угловые смещения руля и контролируемого переднего колеса, постоянны в секторе угла возможного разброса величин люфтов руля и практически не зависят от степени износа деталей рулевого управления. С увеличением износа изменяется лишь на координате Х углового смещения руля угловое расстояние б1-б2 между линейными ветвями, соответствующее величине угла реального свободного хода рулевого колеса.
Предлагаемый способ измерения люфта рулевого управления поясняет диаграмма фиг.1, где на линии П1 обозначены дискретные импульсы Т4 и Т5 реверсивного датчика углового смещения руля и направления их появления, на линии В1 - аналогичные дискретные импульсы Т1 и Т2 реверсивного датчика контроля смещения переднего колеса относительно корпуса автомобиля, на линии П2 - угловой размер левой и правой нелинейных зон передаточного отношения рулевого управления, на П3 - скрытые (чистые) люфты нелинейных зон, на П4 - линейные составляющие нелинейных зон.
СчL - счетчик 5 контроля углового смещения руля (фиг.3).
СчΔ - счетчик 4 контроля смещения переднего колеса (фиг.3).
П5 - состояние СчL при определении угловой величины контролируемого смещения.
П6 - угловой расчетный диапазон люфта.
П7 - состояние СчL с угловыми эквивалентами контролируемых смещений (углов поворота руля, соответствующих смещению переднего колеса на контролируемое смещение).
П8 - реальный угловой диапазон люфта.
П9 - состояние СчL с суммированными угловыми эквивалентами.
П10 - смещенное определение угла люфта (счетчик 7 вычисления угла люфта см. фиг.3).
П11, П12, П13 - следующий цикл измерения (аналогично П5, П9, П10).
B2 - состояние счетчика СчΔ при отработке контролируемого и дополнительного смещения.
В3 - то же, при возврате переднего колеса в сторону исходного состояния.
В4 - то же, при отработке следующего контролируемого и дополнительного смещения.
В5 - то же, при возврате переднего колеса в исходное состояние.
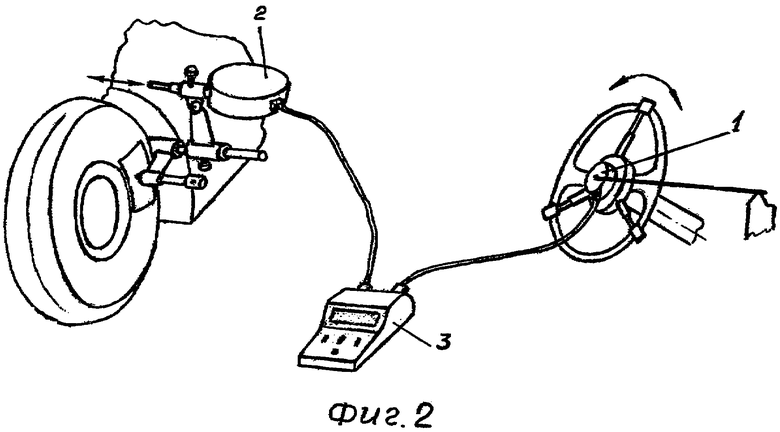
На фиг.1 показана система координат передаточного отношения рулевого управления, связывающая коэффициентом передаточного отношения угловые смещения руля (координата X) с угловым смещением контролируемого переднего колеса (координата Y), или с пропорциональным ему и принятом в способе линейным смещением на радиусе установки реверсивного датчика 2 (см. фиг.2), контролирующего это смещение выдачей разделенных по направлениям дискретных импульсов Т1 и Т2 (линия В1 фиг.1). Такой метод контроля смещения переднего колеса, значительно повышает его разрешающую способность и чувствительность. Углы наклона α линейных ветвей, соответствующие коэффициенту передаточного отношения рулевого управления, показаны условно для пояснения сущности процессов и при определении угловой величины люфта используется только факт их наличия, но не конкретная величина. Угловое смещение руля в секторе нестабильной величины угла между началами нелинейных зон а1 и а2 происходит без смещения контролируемого колеса, с выборкой угловой величины чистого люфта. В районе нелинейных зон а1-г1 и а2-г2 начинается его смещение, не соответствующее коэффициенту передаточного отношения, действие которого восстанавливается в точке ж1 или ж2 после полной выборки нелинейных зон смещением переднего колеса на величины г1-ж1 или г2-ж2. Нелинейные зоны при этом разделяются на скрытые в них угловые люфты а1-б1 или а2-б2 и линейные составляющие б1-г1 или б2-г2, а границы реального люфта руля определяются точками пересечения б1 и б2 линейных ветвей характеристики передаточного отношения рулевого управления с координатой Х углового смещения руля. При смещении переднего колеса вращением руля, например, в II квадранте системы координат на контролируемую величину OК1 изменится и пространственное положение люфта, он смещается на линию и1-к1 на ту же величину OК1 при одновременном угловом смещении его левого края, соответствующем положению точки д1 системы координат с исчезновением в точке ж1 левой нелинейной зоны а1-г1 при сохранении ее правой а2-г2 части (даже некотором увеличении).
Способ заключается в последовательном повороте руля в одну и другую стороны на угол, заведомо больший люфта со смещением контролируемого переднего колеса, а так же люфта на равные между собой контролируемые величины OК1 и ОК2 соответственно в точки и1 и и2 линейных ветвей характеристики передаточного отношения рулевого управления. Достижение точек и1 и и2 сопровождается выдачей счетчиком СчΔ потенциальных сигналов, по которым начинается контроль углового смещения руля в счетчике СчL с точки д1 (или д2 в следующем цикле измерения) по дискретным импульсам Т4, Т5 реверсивного датчика 1 (фиг.2, 3) и формируется расчетный угловой диапазон люфта от точки д1 до точки д2 (линия П6) люфта рулевого колеса, состоящий из угла реального люфта руля между точками пересечения линейных ветвей б1 и б2 характеристики передаточного отношения с координатой Х углового смещения рулевого колеса и двух равных между собой угловых эквивалент д1-б1 и д2-б2, пропорциональных контролируемым смещениям OК1 и ОК2, с учетом коэффициента передаточного отношения рулевого управления. Они определяются в каждом цикле измерения люфта дополнительным смещением переднего контролируемого колеса вращением руля на величину к1-м1 (к2-м2), равную OК1 (или ОК2), с фиксацией соответствующего этому смещению угла смещения рулевого колеса д1-е1 (или д2-е2) в реверсивном счетчике СчL (линия П5) угловых смещений руля по импульсам Т4 (или Т5) реверсивного датчика угловых смещений руля (дополнительное смещение может отличаться по величине от контролируемого с соответствующим коэффициентом пропорциональности, но такое решение усложняет конструкцию устройства по данному способу и вносит дополнительную погрешность пересчета при определении угловых эквивалент). При этом величины углов д1-е1 (или д2-е2) связаны коэффициентом передаточного отношения со смещениями к1-м1 (или к2-м2) и пропорциональны им. Но так как смещения переднего контролируемого колеса ОК1=к1-м1=ОК2=к2-м2, то по принципу подобия зафиксированный в счетчике СчL угол е1-д1 (или е2-д2) равен угловым эквивалентам д1-б1 и д2-б2 контролируемых смещений OК1 и ОК2. Вычитание известных угловых величин d1-б1 и d2-б2 (линия П7) из расчетного углового диапазона люфта руля (линия П6) определяет реальный угол свободного хода (люфта) рулевого колеса (линия П8), оконтуренного точками пересечения б1 и б2 линейных ветвей характеристики передаточного отношения рулевого управления с координатой Х углового смещения руля.
Наиболее простое решение практического определения величины угла люфта заключается во внесении в счетчик СчL (линия П9) контроля величины углового смещения руля при определении угловой эквиваленты (линия П5) сразу утроенной ее величины, одна из которой соответствует дополнительному смещению к1-м1 (или к2-м2 в следующем цикле), а две другие - суммарной угловой величине двух угловых эквивалент контролируемых смещений OК1 и ОК2, равных между собой. При изменении направления вращения руля в точке е1 на вход вычитания счетчика СчL (5 на фиг.3) начнут поступать импульсы Т5 датчика 1 (фиг.2, 3) углового смещения руля. В момент обнуления счетчика (линия П9) его схемой выдается сигнал, запускающий схему 6 определения границ люфта (фиг.3), и счетчик 7 (линия П10) его величины. В это же время переднее контролируемое колесо и люфт смещаются вращением руля в сторону исходного состояния, которое определяется по моменту обнуления счетчика СчΔ поступающими на его вычитающий вход импульсами Т2 реверсивного датчика 2 (фиг.2, 3) контроля смещения колеса и далее смещаются на вторую контролируемую величину ОК2 по тем же импульсам Т2, но поступающим уже на вход сложения счетчика СчΔ (линия В4 фиг.1), при достижении которой схемой счетчика СчΔ выдается импульсный сигнал на схему определения границ люфта 6 (фиг.3), которая выдает сигнал окончания счета на схему счетчика вычисления величины люфта 7 (фиг.3) и начала нового цикла измерений (линия П11) с очередного определения угловых эквивалент контролируемых смещений (аналогично линии П5) и так далее. При этом начало и конец отсчета угла люфта смещаются от его истинного положения (линия 8) на одну угловую эквиваленту (линия П10), оставляя неизменной его величину.
При отработке дополнительных смещений к1-м1 (или к2-м2 в другом цикле) их возможное превышение на величину м1-р1 со смещением левого края люфта в точку H1 не ведет к ошибке определения величины люфта, так как это превышение суммируется с числом в счетчике СчΔ (линия в2), аналогично соответствующее ему угловое смещение руля е1-с1 так же (без утроения) учитывается счетчиком СчL (линия П9), что при обратном вращении руля не меняет режим измерения и границ диапазонов (сколько прибавили столько и убавили) во всех циклах измерений.
Так же предусмотрена компенсация погрешности измерения люфта, вызванная наличием собственных люфтов датчика 1 углового смещения руля и датчика 2 контроля смещения переднего колеса (фиг.2).
Из фиг.1 следует, что из-за собственного люфта датчика 1 (фиг.2) угловых смещений руля при изменении его направления вращения (линия П9 при смене импульсов Т4 на Т5) обнуление счетчика СчL (линия П9) произойдет на величину собственного люфта датчика позднее и на столько же уменьшится результат замера величины люфта руля. Для устранения этой погрешности в каждом цикле измерений известная величина собственного люфта датчика угловых перемещений руля вносится в счетчик 7 (фиг.3) и прибавляется к результату замера, восстанавливая его истинность. Аналогично собственный люфт датчика 2 смещения контролируемого переднего колеса при смене направления его перемещения и появления импульсов Т2 вместо Т1 (и наоборот в следующем цикле) ведет к более позднему обнулению реверсивного счетчика СчΔ (линия В3) и смещению точки б2 (или б1 в следующем цикле) и, соответственно, точки д2 (или д1 в следующем цикле) и завышению результата замера величины люфта руля. Эта погрешность устраняется уменьшением величины, зафиксированной в счетчике СчL (линия В2 или В4 в следующем цикле), величины реального контролируемого смещения на величину собственного люфта датчика в каждом цикле измерений, что так же восстанавливает истинность замера величины люфта руля. Коррекция на погрешность от собственных люфтов датчиков углового смещения руля и контролируемого переднего колеса вводится блоком коррекции 8 (фиг.3) в начале каждого цикла измерений после приведения схемы блока управления и регистрации 3 (фиг.2) в исходное состояние и предшествует всем остальным операциям.
Технический результат предлагаемого способа заключается в повышении точности замеров величины люфта, стабильности и повторяемости результатов за счет использования в способе датчиков и схем с цифровой обработкой информации и их высокой дискретности. Способ реализован в устройстве, подобном описанному в заявке на изобретение “Устройство для диагностики рулевого управления транспортных средств” рег. №2002100029 от 04 января 2002 г.
Проверка проводилась при диагностике рулевого управления легковых автомобилей ВАЗ-2109 и “Москвич” М-412, в соответствии с подпунктом 5.2.3.2 пункта 5.2 “Методы проверки рулевого управления” ГОСТ р51709-2001 “Требования безопасности к техническому состоянию и методы проверки”, с контрольными замерами угломерной шкалой диаметром 400 мм, укрепленной соосно с рулевым колесом, момент начала смещения переднего контролируемого колеса определялся индикатором ИЧ-10, установленном на крепежном приспособлении датчика. В результате испытаний установлена высокая стабильность и повторяемость результатов (разброс показаний не более ±0,3° от среднего значения с занижением до 1,0 углового градуса результатов этого же замера угломерной шкалой, что можно объяснить грубой градуировкой шкалы (через 1 градус) и трудностью объективной оценки момента смещения колеса по индикатору ИЧ-10 (0,02-0,03 мм), а так же тем, что при инструментальном замере в него попадала лишь часть скрытых люфтов нелинейных зон). На фиг.2 показано устройство для реализации способа. Оно состоит из датчика 1 угловых смещений руля, крепящегося по его центру самоцентрирующимся захватом, датчика 2 контроля линейного смещения колеса относительно корпуса автомобиля, с устройством его крепления на переднем колесе и блока 3 управления и регистрации.
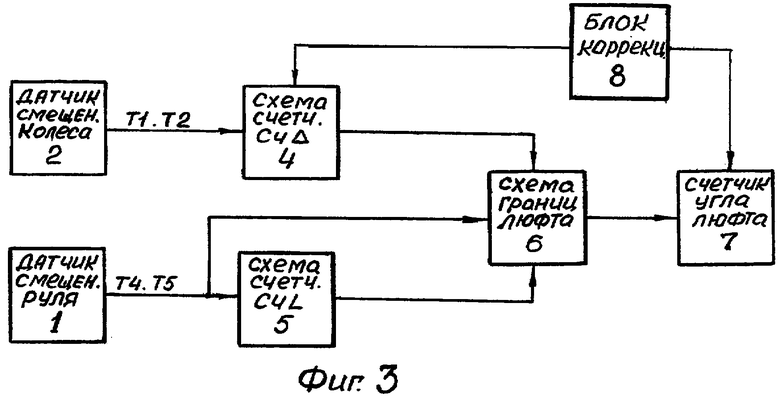
На фиг.3 изображена блок-схема способа, где 1 - реверсивный датчик контроля углового смещения руля; 2 - реверсивный датчик контроля смещения переднего колеса; 4 - схема счетчика СчΔ контроля величины смещения переднего колеса; 5 - схема счетчика СчL контроля величины углового смещения руля; 6 - схема определения границ люфта руля; 7 - схема счетчика вычисления величины люфта руля; 8 - блок коррекции. Схемы 4, 5, 6, 7, 8 находятся в блоке управления и регистрации 3 (фиг.2).
Изобретение относится к технической диагностике состояния рулевого управления транспортных средств по величине люфта. Способ измерения люфта рулевого управления заключается в том, что производят последовательный поворот руля в обе стороны на угол, превышающий люфт, со смещением переднего колеса на равные контролируемые величины, по окончании которых формируют расчетный угловой диапазон люфта, вычитанием из величины которого угловых эквивалент контролируемых смещений определяют его величину. Определение угловых эквивалент контролируемых смещений производится в каждом цикле измерения люфта. Также в каждом цикле вводится коррекция погрешности измерения от собственных люфтов датчиков контроля смещения переднего колеса и руля. Технический результат - увеличение точности контроля и стабильности его результатов. 3 ил.
Способ измерения люфта рулевого управления, заключающийся в том, что производят поворот руля в одну и в другую стороны на угол, больший люфта, отличающийся тем, что вводят коррекцию погрешности контроля смещений переднего управляемого колеса и руля, сдвигают люфт контролируемыми смещениями переднего колеса, формируют по моментам их окончания расчетный угловой диапазон люфта и связывают его границы с угловым смещением руля, определяют по дополнительному смещению переднего колеса, равному контролируемому и с коррекцией его возможного превышения, суммарную величину угловых эквивалент контролируемых смещений, после чего люфт оценивают угловой величиной расчетного диапазона люфта с исключением из нее суммарной величины угловых эквивалент контролируемых смещений.
| СПОСОБ КОНТРОЛЯ ЛЮФТА В РУЛЕВОМ УПРАВЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1998 |
|
RU2129712C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВРЕМЕНИ КОРРЕКЦИИ ВСКРЫТИЯ ИЛИ ОТДЕЛЕНИЯ ГОЛОВНОЙ ЧАСТИ РАКЕТЫ | 2008 |
|
RU2400699C2 |
| US 3889527 A, 17.06.1975 | |||
| БЛОК ДЛЯ ТРАНСПОРТИРОВКИ КАТУШЕК | 2020 |
|
RU2801855C1 |

