Изобретение относится к технической диагностике состояния рулевого управления транспортных средств по величине суммарного люфта и может быть использовано при проведении государственного технического осмотра - для измерения суммарного люфта рулевого управления автотранспортного средства.
Известен способ контроля люфта в рулевом управлении транспортного средства и устройство для реализации способа [Патент РФ №2129712, опубликован 27.04.1999 г.], который заключается в том, что производят поворот руля на угол, больший люфта, формируют характеристику люфта как зависимость перемещения управляемого колеса от угла поворота руля, после чего люфт оценивают как суммарный угол поворота руля между указанными линейными зонами характеристики.
Недостатком способа и устройства является их сложность и многоэлементность, необходимость применения механических контактных датчиков угла поворота руля и угла поворота управляемого колеса.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ измерения, основанный на измерении суммарного люфта рулевого управления автотранспортного средства с помощью люфтомера со световым устройством фиксации начала поворота управляемых колес, содержащим прожектор, установленный на диск управляемого колеса, экран, фотоэлементы, установленные на экране и скоммутированные с сигнальными приборами и и дисплеем компьютера [Патент РФ №2230304, опубликован 10.06.2004 г.].
Недостатком способа является сложность конструкции экрана, дискретный характер размещения фотоэлементов на нем и, следовательно, низкая точность определения начала поворота управляемого колеса. Кроме того, необходимо применение механического датчика угла поворота рулевого колеса.
Техническим результатом изобретения является повышение точности и эффективности способа.
Задача для достижения технического результата решается тем, что в предлагаемом способе измерения суммарного люфта рулевого управления автотранспортного средства, включающем фиксирование угла поворота рулевого колеса от момента начала движения управляемых колес в одну и другую сторону, для измерения угла поворота рулевого колеса используют вебкамеру с выходом на персональный компьютер, причем закрепляют ее на рулевом колесе так, что ее оптическая ось совпадает с осью поворота рулевого колеса, при этом угол поворота рулевого колеса определяют по углу поворота видимого изображения по результатам анализа последовательности изображений (межкадровой разнице), для определения момента начала движения управляемых колес используют вторую вебкамеру, синхронизированную с первой, и закрепляют ее на диске управляемого колеса так, что ее ось параллельна или перпендикулярна оси вращения колеса и к тому же горизонтальна, при этом момент начала поворота управляемого колеса определяют по началу смещения видимого изображения по результатам анализа последовательности изображений (межкадровой разнице), а величину суммарного люфта рулевого управления определяют на персональном компьютере на основании совместного анализа синхронизированных по времени последовательностей видеорядов с первой и второй вебкамер.
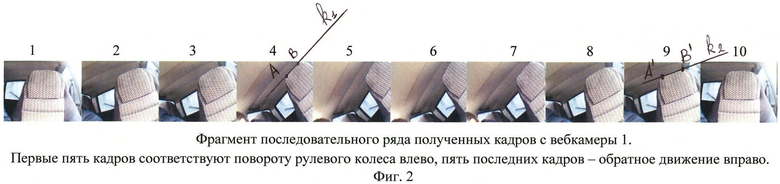
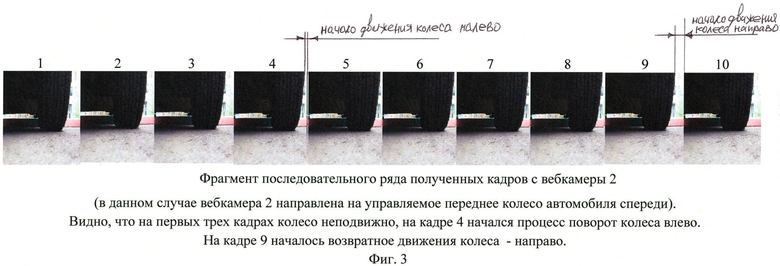
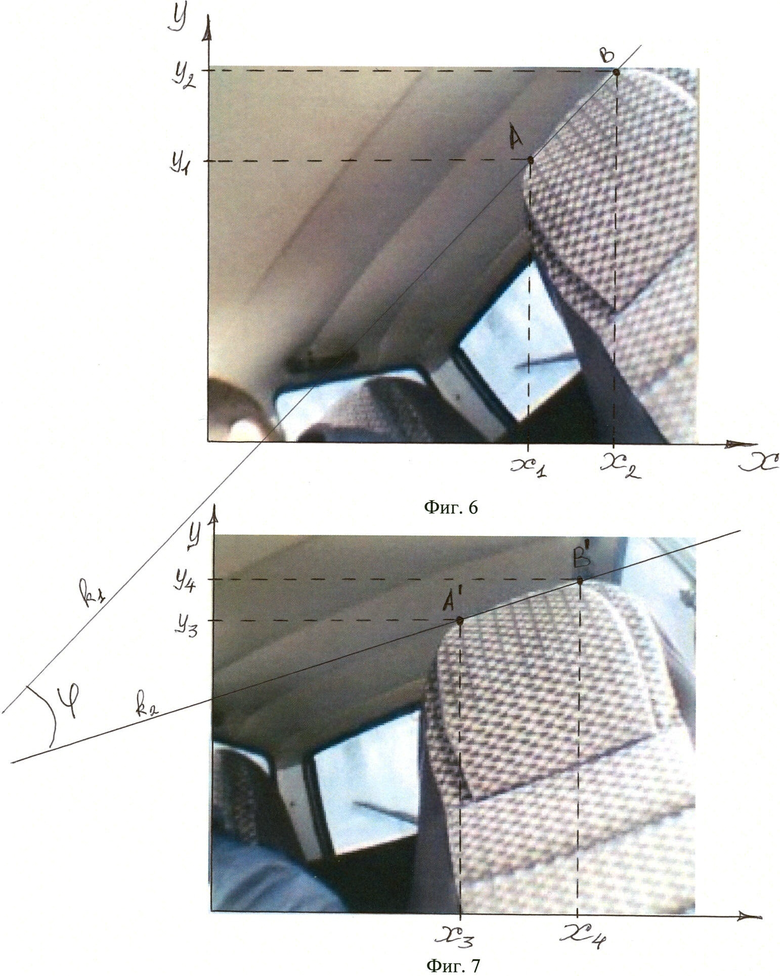
На фиг.1 показана блок-схема реализации способа измерения суммарного люфта рулевого управления; на фиг.2 показан фрагмент последовательного ряда кадров, полученных с вебкамеры 1; на фиг.3 показан фрагмент последовательного ряда кадров, полученных с вебкамеры 2; на фиг.4 приведен пример изображения с вебкамеры 1 и выбора характерных точек и их координат для расчета угла поворота; на фиг.5 приведен пример использования элементов распознавания образов для идентификации зафиксированных вебкамерой 1 объектов; на фиг.6 представлен пример кадра с вебкамеры 1, определение на нем начальных координат точек А и В; на фиг.7 представлен пример кадра с вебкамеры 1, определение на нем конечных координат точек А' и В' и иллюстрация определяемого угла φ между прямыми, проходящими через указанные пары точек.
Для реализации способа используются следующие устройства (см. фиг.1): вебкамера 1 контроля угла поворота рулевого колеса (руля автомобиля), вебкамера 2 контроля начала движения управляемого колеса, персональный компьютер (ПК) 3 с монитором (или электронный блок с индикатором), на котором отображается величина измеренного люфта. В ПК установлено программное обеспечение 5, синхронизирующее вебкамеры 1 и 2, и осуществляющее вычисление суммарного люфта рулевого управления.
Способ реализуется следующим образом.
Величину суммарного люфта определяют по углу поворота рулевого колеса с помощью обработки видеопотоков (последовательностей кадров, изображений), поступающих с двух синхронизированных вебкамер. Для этого веб-камеру 1 устанавливают на рулевом колесе (руле автомобиля) таким образом, чтобы ее оптическая ось совпадала с осью поворота рулевого колеса, а объектив был направлен в салон (кабину) автомобиля и захватывал в сцену кадра характерные рельефные фрагменты салона (граница стекла заднего вида, боковина или край водительского сиденья и пр.). Вебкамеру 2 закрепляют на диске дальнего (от рулевой колонки) управляемого колеса таким образом, чтобы ее оптическая ось была параллельна или перпендикулярна оси вращения колеса и к тому же горизонтальна, а в ее объектив (в сцену кадра) захватывались рельефные предметы, неподвижно зафиксированные на посту диагностики. Изображения с вебкамер синхронизированно поступают в компьютер. По команде «Старт» с компьютера оператор начинает медленно поворачивать рулевое колесо в одну сторону (влево) до момента начала движения управляемого колеса. В момент начала движения управляемого колеса влево, который определяется по началу изменения изображения с вебкамеры 2, запоминается порядковый номер кадра «N1» с вебкамеры 1, и подается команда оператору, который начинает медленно поворачивать рулевое колесо в противоположную сторону (вправо) и поворачивает его до начала движения управляемого колеса вправо, что определяется по началу изменения изображения с вебкамеры 2, при этом запоминается порядковый номер кадра «N2» с вебкамеры 1. Вычисление угла (суммарного люфта в рулевом управлении) осуществляют по углу поворота изображения с вебкамеры 1 на кадре «N2» относительно кадра «N1». Весь процесс анализа видеопотоков изображений с вебкамер и вычисления угла (суммарного люфта в рулевом управлении) осуществляется в автоматизированом режиме в реальном времени, с применением специальной программы, установленной в ПК или «зашитой» в электронном блоке. Результат вычисления угла (суммарного люфта) выдается на монитор ПК или на цифровой индикатор электронного блока.
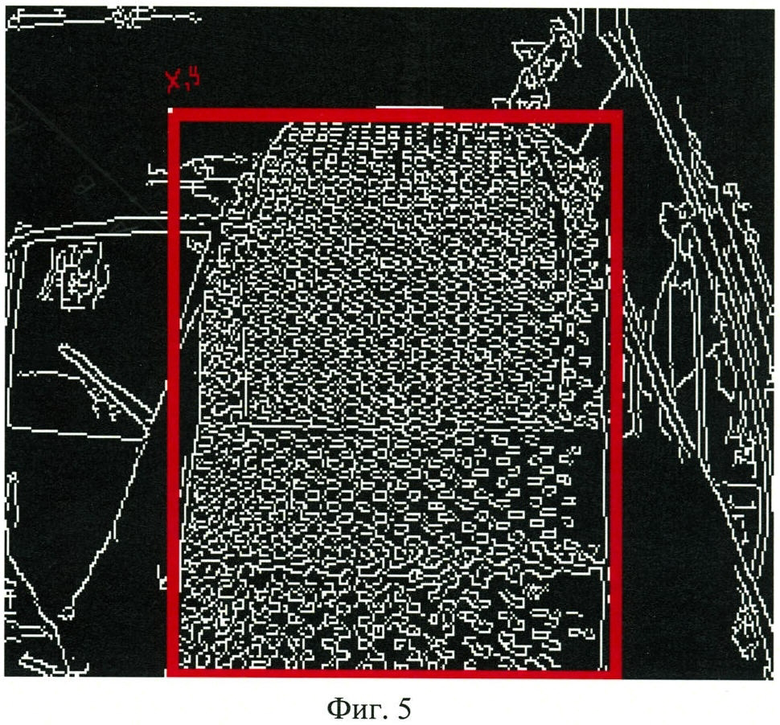
Способ, реализованный при определения суммарного люфта в рулевом управлении, основан на следующем. На изображении с вебкамеры 1, установленной на рулевом колесе, выбираются две характерные точки А и В. Точки выбираются, например, методом подсвечивания объекта изображения (фона в фокусе вебкамеры 1) неподвижными точечными источниками, например, лазерами разного цвета. Далее, при медленном поворачивании рулевого колеса влево и, следовательно, поворачивании изображения на некоторый угол, на видеоряде с вебкамеры 1 выбирается кадр N1, синхронизированный с кадром вебкамеры 2 и соответствующим началу поворота управляемого колеса, что определяется по изменению изображения с вебкамеры 2. На этом кадре N1 определяются координаты выбранных точек A{X1,Y1} и B{X2,Y2} относительно границ кадра (матрицы). Координаты определяют с использованием монохромного, соответствующего цвету лазера, фильтрования этого изображения. Выбор точек «А», «В» и определение их координат также может осуществляться и другими способами, например, с использованием пакетов программ, реализующих элементы теории распознавания образов. Например, на Фиг.4 показан вид с вебкамеры 1 на водительское сиденье, а на Фиг.5 показан вариант представления рельефного контура этого водительского сиденья в виде прямоугольника, на сторонах или пересечениях сторон которого могут быть выбраны точки А и В. Далее через выбранные точки А и В мысленно проводится линия и составляется уравнение прямой в координатной форме:

где {x1,у1} - координаты точки А;
{х2,у2} - координаты точки В;
Угловой коэффициент k1 прямой, проходящей через две точки, определяется по формуле:

Далее, при медленном поворачивании рулевого колеса в другую сторону (вправо) и, следовательно, изображения на некоторый угол, на видеоряде с вебкамеры 1 выбирается кадр N2, синхронизированный с кадром вебкамеры 2 и соответствующим началу поворота управляемого колеса вправо (что определяется по изменению изображения с вебкамеры 2). На этом кадре N2 определяются новые координаты ранее выбранных точек А'{Х3,Y3} и B'{X4,Y4}. Через эти точки также мысленно проводим линию, составляем уравнение прямой в координатной форме и определяем для нее угловой коэффициент k2 прямой, проходящей через две точки

Вычисление суммарного люфта сводится к вычислению угла между двумя прямыми. Правомерность изложенного объясняется следующим. На изображении берутся две точки, которые двигаются по окружности. Через две точки проводится прямая линия, которая вращается вокруг точки (центра поворота), координаты которой нам необязательно вычислять. Угол между этими двумя прямыми и будет искомым углом. Таким образом, требуется вычислить координаты точек на изображениях, совпадающих с номерами кадров, зафиксировавших моменты начала движения управляемого колеса в одну сторону (вправо) и в другую сторону (влево).
Угол между двумя прямыми АВ и А'В' называется угол, на который надо повернуть первую прямую АВ, вокруг точки пересечения этих прямых против часовой стрелки, до совпадения ее со второй прямой А'В'. Так как две прямые заданы уравнениями с угловыми коэффициентами, то угол между прямыми определяется по следующей формуле:
 ,
,

Наши точки будут находиться в первой и второй координатных четвертях, поэтому следует учитывать знак тангенса.
Преимуществами предлагаемого способа измерения суммарного люфта в рулевом управлении является то, что оба используемых датчика - и угла поворота рулевого колеса, и начала поворота управляемого колеса - бесконтактные (вебкамеры), точность установки их на рулевом колесе и на управляемом колесе не оказывает большого влияния на процесс измерения, вследствие чего повышается надежность и точность измерения. Реперы (нулевые положения, или точки отсчета) при измерении угла поворота рулевого колеса и момента начала поворота управляемых колес по сути являются виртульными, т.к. в качестве них используются координаты точек на выбранных изображениях с синхронизированных кадров двух видеорядов, что и обуславливает простоту применяемой для измерения элементной базы.

Изобретение относится к области транспортного машиностроения. Способ измерения суммарного люфта рулевого управления автотранспортного средства включает фиксирование угла поворота рулевого колеса от момента начала движения управляемых колес в одну и другую сторону. Для измерения угла поворота рулевого колеса используют вебкамеру с выходом на персональный компьютер. Вебкамеру закрепляют на рулевом колесе так, что ее оптическая ось совпадает с осью поворота рулевого колеса. Угол поворота рулевого колеса определяют по углу поворота видимого изображения по результатам анализа последовательности изображений. Для определения момента начала движения управляемых колес используют вторую вебкамеру, синхронизированную с первой. Вторую вебкамеру закрепляют на диске управляемого колеса так, что ее оптическая ось параллельна или перпендикулярна оси вращения колеса и к тому же горизонтальна. Момент начала поворота управляемого колеса определяют по началу смещения видимого изображения по результатам анализа последовательности изображений. Величину суммарного люфта рулевого управления определяют на персональном компьютере на основании совместного анализа синхронизированных по времени последовательностей видеорядов с первой и второй вебкамер. Достигается повышение точности измерения суммарного люфта. 7 ил.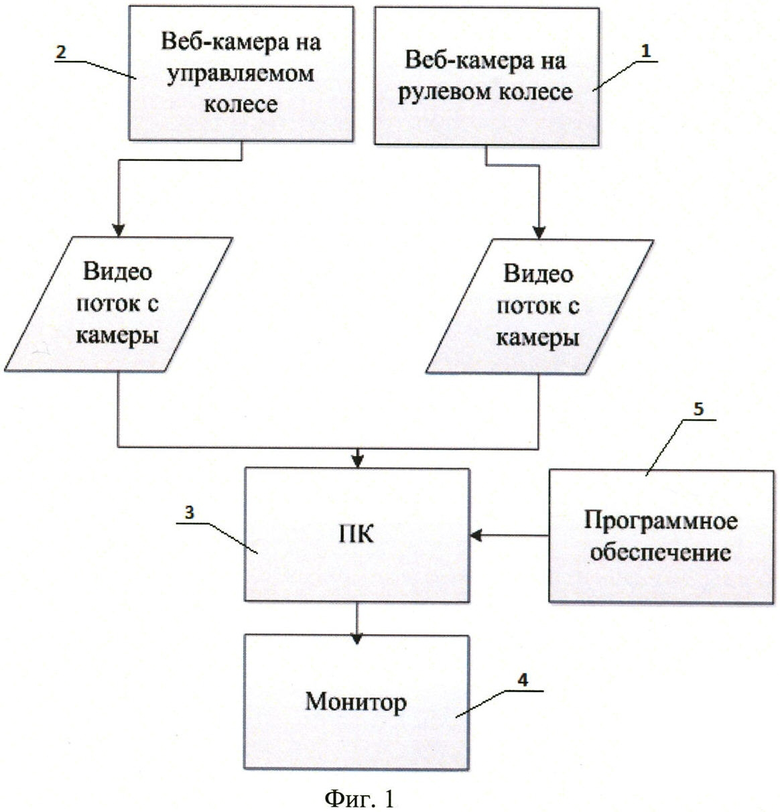
Способ измерения суммарного люфта рулевого управления автотранспортного средства, включающий фиксирование угла поворота рулевого колеса от момента начала движения управляемых колес в одну и другую стороны, отличающийся тем, что для измерения угла поворота рулевого колеса используют веб-камеру с выходом на персональный компьютер, причем закрепляют ее на рулевом колесе так, что ее оптическая ось совпадает с осью поворота рулевого колеса, при этом угол поворота рулевого колеса определяют по углу поворота видимого изображения по результатам анализа последовательности изображений (межкадровой разнице), для определения момента начала движения управляемых колес используют вторую веб-камеру, синхронизированную с первой, и закрепляют ее на диске управляемого колеса так, что ее оптическая ось параллельна или перпендикулярна оси вращения колеса и к тому же горизонтальна, при этом момент начала поворота управляемого колеса определяют по началу смещения видимого изображения по результатам анализа последовательности изображений (межкадровой разнице), а величину суммарного люфта рулевого управления определяют на персональном компьютере на основании совместного анализа синхронизированных по времени последовательностей видеорядов с первой и второй веб-камер.
| СПОСОБ ИЗМЕРЕНИЯ ЛЮФТА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2232980C2 |
| СПОСОБ КОНТРОЛЯ СУММАРНОГО ЛЮФТА В РУЛЕВОМ УПРАВЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2266530C1 |
| СПОСОБ РЕГУЛИРОВКИ УГЛОВ УСТАНОВКИ КОЛЕСА АВТОМОБИЛЯ | 2006 |
|
RU2368883C2 |
| JP 54138240 A, 26.10.1979. | |||

