Изобретение относится к средствам контроля технического состояния транспортных средств с рулевым управлением.
В настоящее время замер люфта рулевого управления автотранспортных средств (РУ АТС) производится следующим образом:
1. На рулевое колесо устанавливается основной блок люфтомера (ОБ), содержащий датчик углового перемещения (ДУПР) рулевого колеса и электронную схему, обрабатывающую сигналы этого датчика и датчика перемещения управляемого колеса (УК) АТС (датчик колеса - ДК), который устанавливается к управляемому колесу (см. заявка РФ N 99101733 от 2001 г.).
2. При вращении рулевого колеса ДУПР производит отсчет угла его поворота.
3. После выбора люфта в одну сторону начинается движение управляемого колеса. Сигнал об этом движении дает ДК, причем не сразу, а после перемещения УК на некоторый угол, определяемый чувствительностью ДК. Этот угол редуцируется на руль с учетом передаточного отношения рулевого механизма, которое у различных моделей и видов АТС различается существенно.
4. ОБ учитывает редуцируемый угол, как часть люфта, что преувеличивает действительный люфт и приводит к забраковыванию части фактически исправных АТС.
5. Т.к. для замера люфта руль сначала вращают в одну сторону до выбора люфта и начала движения управляемого колеса, а затем в другую до выбора люфта в другую сторону и соответственно начала движения управляемого колеса в другую сторону, ошибка удваивается и составляет угол чувствительности ДК, умноженный на 2 и умноженный на коэфициент редуцирования рулевого механизма АТС (для автомобилей ВАЗ это около 20) с вытекающими последствиями.
6. В связи с тем, что чувствительность ДК у каждого экземпляра ДК от замера к замеру постоянна, но у разных экземпляров ДК различается в связи с ограниченной достижимой точностью изготовления деталей ДК и их сборки, а также в связи с выше указанным разнобоем в механизмах РУ АТС, учесть возникающую систематическую погрешность без ее измерения при каждом замере люфта невозможно.
Известен способ измерения люфта в рулевом управлении транспортного средства и устройство для его осуществления, заключающиеся в том, что поворачивают руль последовательно в одну и другую стороны и регистрируют соответствующие углы поворота руля (см. патент РФ N 2119712 от 27.04.99).
Недостатком известного способа является следующее.
В соответствии с п.3.33 ГОСТ Р 51709-2001 суммарный люфт в рулевом управлении - это угол поворота рулевого колеса от положения, соответствующего началу движения управляемых колес АТС в одну сторону, до положения, соответствующего началу их движения в противоположную сторону”.
Согласно изобретению по патенту N 2129712 “люфт оценивают как суммарный угол поворота руля между указанными линейными зонами характеристики”, что противоречит требованиям ГОСТ.
Информация о движении управляемого колеса вырабатывается не описанным в заявке датчиком, который должен иметь очень высокую разрешающую способность для построения показанной в формуле этого изобретения диаграммы, а значит, и высокую стоимость, кроме того, существует граница чувствительности, переходить которую нельзя, т.к. при произведении замера диск колеса имеет перемещения, не связанные с вращением рулевого колеса, - вибрации автомобиля при работающем двигателе, колебания кузова автомашины из-за движений сидящего в ней оператора, воздействия ветра на открытых площадках и т.п., которые могут восприниматься датчиком, как искомое перемещение от воздействия руля.
Кроме того, использование такого датчика требует использования достаточно сложного электронного блока обработки его информации, что также увеличивает стоимость.
По отношению к вводимому ГОСТу люфт определен не от начала движения колеса, а с задержкой до перехода на линейную зависимость перемещения колеса от движения руля.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в замере выше описанной систематической погрешности в процессе каждого измерения люфта РУ АТС и вычитании ее из полученного замера люфта.
Указанный технический результат в способе по первому варианту достигается тем, что при вращении руля в одну сторону в первый фиксированный момент движения колеса начинают отсчет угла поворота руля (величины люфта в сумме с ошибкой), во второй фиксированный момент движения колеса начинают отсчет ошибки, в третий фиксированный момент движения колеса прекращают поворот руля в одну сторону и фиксируют конец отсчета ошибки, вращают руль в противоположную сторону до четвертого фиксированного момента движения колеса, наступающего после прохождения колесом своего первоначального положения, и прекращают измерение суммарного угла поворота руля (величины люфта в сумме с ошибкой), а люфт определяют после вычитания из измеренного общего угла поворота руля (величины люфта в сумме с ошибкой) измеренной ошибки.
Во втором варианте способа измерения люфта в рулевом управлении АТС для достижения технического результата при вращении руля в одну сторону в первый фиксированный момент движения колеса начинают отсчет угла поворота руля (величины люфта в сумме с ошибкой), прекращают поворот руля и начинают его вращение в другую сторону, при движении колеса в противоположную сторону во второй фиксированный момент движения колеса заканчивают отсчет величины люфта в сумме с ошибкой и продолжают вращение руля в том же направлении, в третий фиксированный момент движения колеса начинают отсчет ошибки, в четвертый фиксированный момент движения колеса заканчивают отсчет ошибки, прекращают вращение руля, а люфт определяют после вычитания измеренной ошибки из измеренного угла величины люфта в сумме с ошибкой.
В третьем варианте способа измерения люфта в рулевом управлении АТС для достижения технического результата при каждом включении устройство калибруется, т.е. определяется выше означенная ошибка, запоминается и вычитается из всех замеров величины люфта в сумме с ошибкой на данном проверяемом АТС. При этом при включении устройства вводится режим калибровки и при вращении руля в одну сторону в первый фиксированный момент движения колеса начинают отсчет ошибки, прекращают поворот руля и начинают его вращение в другую сторону, при движении колеса в противоположную сторону во второй фиксированный момент движения колеса заканчивают отсчет ошибки, руль выставляется в исходное положение и устройство переходит в режим замера величины люфта в сумме с ошибкой и при вращении руля в одну сторону в третий фиксированный момент движения колеса начинают отсчет величины люфта в сумме с ошибкой, прекращают поворот руля и начинают его вращение в другую сторону, при движении колеса в противоположную сторону в четвертый фиксированный момент движения колеса заканчивают отсчет величины люфта в сумме с ошибкой. Замер величины люфта в сумме с ошибкой производится необходимое количество раз на всех управляемых колесах данного АТС и люфт определяют после вычитания запомненной ошибки из каждого измеренного угла величины люфта в сумме с ошибкой.
Под измерением угла поворота руля следует понимать суммарный угол поворота руля в одну и другую стороны с учетом направления вращения.
В этих вариантах способа для фиксации моментов движения колеса можно использовать два датчика, последовательно реагирующих на его поворот, либо один, дающий сигнал о движения колеса и его направлении.
Устройство для осуществления вариантов способов содержит датчик угла поворота руля, два датчика движения колеса, которые расположены с возможностью последовательной подачи сигналов по мере движения колеса в одну и другую стороны, либо один, дающий сигнал о движении колеса и его направлении, драйверы формирования сигналов датчиков, драйверы формирования сигналов управления датчиками и исполнительными устройствами, микропроцессор вычисления углов поворота руля и люфта, причем каждый датчик или исполнительное устройство, соответствующий драйвер и микропроцессор соединены последовательно, а между собой - параллельно.
В качестве датчиков движения колеса могут быть использованы оптопары, расположенные с возможностью последовательного перекрытия - открытия элементом, сопряженным с колесом, либо потенциометр или другой преобразователь движения в электрический сигнал, сопряженный с колесом.
Сущность изобретения поясняется следующими фигурами.
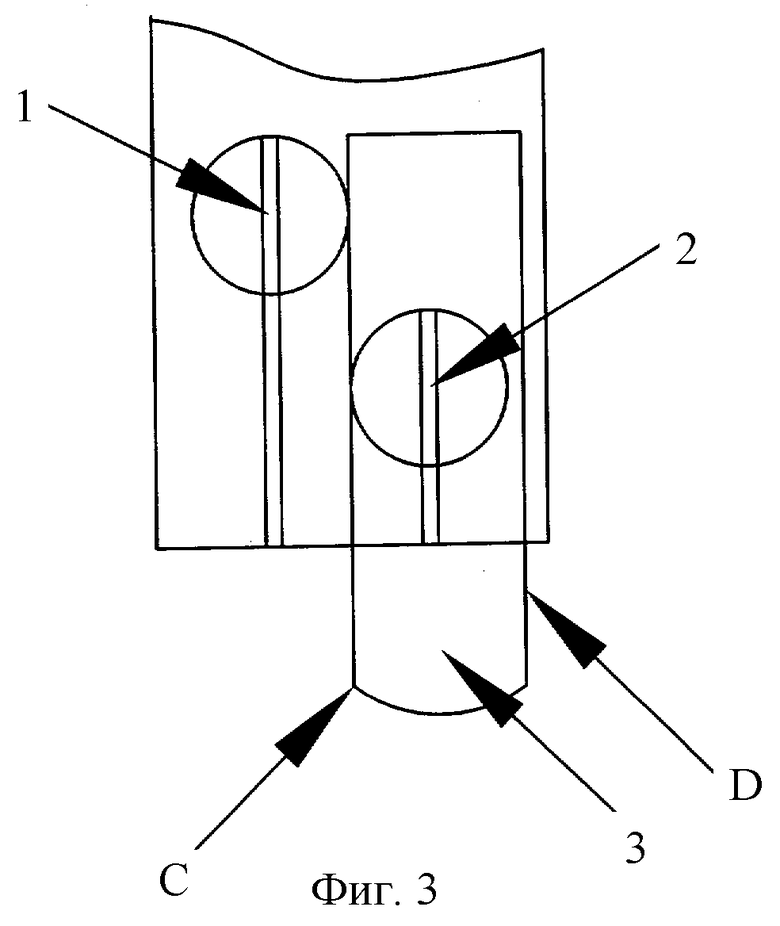
На фиг.1 схематично показан процесс определения люфта рулевого управления, на фиг.2 - схема выполнения датчиков поворота колеса, вид сверху, на фиг.3 - то же, вид сбоку.
Устройство включает в себя следующие элементы: датчики 1 и 2 в виде оптопар и элемент 3 (шторка), сопрягаемый с колесом 4.
Функционирует устройство при реализации способа следующим образом.
При измерении люфта рулевого управления АТС необходимо фиксировать момент трогания управляемого колеса.
При определении начала движения управляемого колеса АТС необходимо использовать датчик, преобразующий угловое перемещение управляемого колеса в электрический сигнал, передаваемый в электронный блок (блок счета) основного блока, для выработки этого сигнала при помощи любого типа датчика перемещения необходимо наличие собственно перемещения управляемого колеса. Без перемещения нет сигнала о перемещении, при этом в зависимости от чувствительности этого датчика потребное перемещение будет различным: чем чувствительнее датчик, тем меньше это перемещение, но тем датчик дороже, кроме того, существует граница чувствительности, переходить которую нельзя, т.к. при произведении замера диск колеса имеет перемещения, не связанные с вращением рулевого колеса, - вибрации автомобиля при работающем двигателе, колебания кузова автомашины из-за движений сидящего в ней оператора, воздействия ветра на открытых площадках и т.п., которые могут восприниматься датчиком, как искомое перемещение от воздействия руля. Наличие необходимого для работы датчика перемещения управляемого колеса приводит к тому, что необходимый для этого перемещения угол поворота руля воспринимается устройством как часть люфта, т.е. устройство в этом случае фактически показывает значение люфта, большее истинного на величину угла поворота управляемого колеса, необходимого для выработки сигнала о движении, умноженного на коэфициент редукции рулевого управления данного АТС и еще на 2, т.к. необходимы 2 сигнала о движении управляемого колеса - в одну сторону и в противоположную. В связи с тем, что коэфициент редукции колеблется от ~15 до ~40 для различных АТС, а оптимальная чувствительность датчика начала движения управляемого колеса составляет ~0,03...0,1 град., то величина ошибки составляет от ~0,9 град. до ~8 град., что превышает допустимую по ГОСТ погрешность замера люфта, которая не должна превышать 1 градус.
Можно определить чувствительность датчика начала движения управляемого колеса при его изготовлении и в дальнейшем вычитать это значение из показаний устройства, умножая его на коэфициент редукции и на 2, но практически сделать это невозможно, т.к. по большинству АТС информации о коэфициенте редукции нет, да и производить какие-либо расчеты при проведении тех. смотра не реально.
Можно, задавшись расчетной чувствительностью датчика начала движения управляемого колеса и среднестатистическим коэфициентом редукции, в дальнейшем умножать значение люфта на вычисленный по этим данным коэфициент (например ~0,7), что существенно уменьшит ошибку измерений люфта для значений допустимого люфта, указанных в ГОСТ.
Таким образом, для определения люфта с наименьшей погрешностью необходимо замерить выше означенную ошибку при производстве каждого замера на каждом проверяемом АТС и ее вычесть из определенного устройством люфта. Это предлагается делать следующим образом.
Устройство отсчитывает угловое перемещение руля для двух состояний рулевого управления:
- когда начало и конец счета ведутся от сигналов ДК при прохождении рулем зоны люфта,
- когда начало и конец счета ведутся от сигналов ДК при прохождении рулем зоны при полностью выбранном люфте при повороте руля в сторону от зоны люфта.
При этом первый замер соответствует величине люфта в сумме с ошибкой, а второй соответствует величине этой ошибки, т.к. датчик угла поворота руля фиксирует величину, соответствующую перемещению управляемого колеса от сигнала с одной стороны до сигнала с другой стороны, уже скорректированной с учетом коэфициента редукции.
Из первого вычитают второй и получают значение люфта без ошибки, вносимой датчиком колеса.
Оптопары 1 и 2 закреплены в корпусе, имеющем щель А, в которой перемещается шторка 3, являющаяся концом измерительной планки и перекрывающая просвет между источником и приемником излучения (светового или инфракрасного), причем шторка перекрывает в “нулевом” (начальном) положении одну из оптопар 2.
Первоначальное вращение руля задается так, чтобы управляемое колесо смещало шторку в сторону открытой оптопары 1, перекрытие которой передней кромкой С шторки выдает 1-й сигнал о выборе люфта (начало отсчета величины люфта в сумме с ошибкой). При дальнейшем движении шторки происходит открытие изначально закрытой оптопары 2 задней кромкой D шторки (начало отсчета ошибки) и при дальнейшем движении шторки (и руля) в том же направлении происходит открытие оптопары 1 задней кромкой D шторки (конец отсчета ошибки и вращения руля в эту сторону).
Далее руль и, соответственно, шторка начинают движение в противоположном направлении и движутся до тех пор, пока шторка своей передней (изначально) кромкой С не откроет оптопару 2 (конец отсчета величины люфта в сумме с ошибкой). Далее следует арифметическая операция вычитания, выполняемая микропроцессором, и индикация результата на дисплее устройства, причем операция вычитания и индикация могут производиться в любом порядке, в том числе начинаться сразу после определения величины ошибки, и индицироваться в этом случае будет нарастающий замер люфта до его полной выборки и получения сигнала от оптопары 2.
При реализации способа по второму варианту устройство работает в следующем порядке.
Первоначальное вращение руля задается так, чтобы управляемое колесо смещало шторку кромкой С в сторону закрытой оптопары 2, открытие которой передней кромкой С шторки выдает 1-й сигнал о выборе люфта (начало отсчета величины люфта в сумме с ошибкой). Направление вращения руля и движения кромки меняется на противоположное до перекрытия оптопары 1 кромкой С (конец отсчета величины люфта в сумме с ошибкой).
При дальнейшем движении шторки происходит открытие изначально закрытой оптопары 2 задней кромкой D шторки (начало отсчета ошибки) и при дальнейшем движении шторки (и руля) в том же направлении происходит открытие оптопары 1 задней кромкой D шторки (конец отсчета ошибки и вращения руля в эту сторону).
Далее следует арифметическая операция вычитания, выполняемая микропроцессором, и индикация результата на дисплее устройства.

Изобретение относится к средствам контроля технического состояния транспортных средств. Сущность вариантов способов измерения люфта заключается во вращении руля последовательно в противоположные стороны и определении ошибки измерения люфта по сигналам датчиков движения колеса. Для нахождения люфта из общего угла поворота руля вычитается ошибка и находится люфт рулевого управления. Технический результат заключается в повышении точности измерения. 3 с. и 6 з.п. ф-лы, 3 ил.

| СПОСОБ КОНТРОЛЯ ЛЮФТА В РУЛЕВОМ УПРАВЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1998 |
|
RU2129712C1 |
| Устройство для контроля параметров рулевого управления | 1988 |
|
SU1534365A1 |
| ЛЫСОВ М.И | |||
| РУЛЕВЫЕ УПРАВЛЕНИЯ АВТОМОБИЛЕЙ | |||
| - М.: МАШИНОСТРОЕНИЕ, 1972, с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU274A1 |

