Изобретение относится к измерительной технике и может быть использовано при настройке тензорезисторных датчиков относительного давления с герметичной внутренней полостью и мостовой измерительной цепью по температурной погрешности.
Известен способ минимизации аддитивной температурной погрешности тензорезисторных датчиков давления с мостовой измерительной цепью, заключающийся в определении величины компенсационного термозависимого резистора и последующей установки его в одно из плеч мостовой измерительной цепи последовательно рабочему тензорезистору с одновременной балансировкой (см. Проектирование датчиков для измерения механических величин. Под редакцией Е.П.Осадчего, 1979).
Основной особенностью датчиков относительного давления является измерение информационного параметра относительно фиксированного давления загерметизированного во внутренней полости датчика. Если датчик абсолютного давления измерение осуществляет относительно вакуума, загерметизированного во внутренней полости, а датчик избыточного давления - относительно давления окружающей среды, изменяющейся в процессе эксплуатации, для чего внутреннюю полость датчика соединяют с окружающей средой, то датчик относительного давления должен измерять относительно известного фиксированного значения давления. Однако герметизация во внутренней полости датчика фиксированного значения давления приводит к появлению значительных температурных погрешностей в процессе эксплуатации при изменении температуры.
Для количественной оценки влияния герметизации корпусных элементов на аддитивную температурную погрешность рассмотрим датчик давления с пределом измерения 0,1 МПа. Пусть во внутренней полости датчика загерметизирован воздух с начальным уровнем давления окружающей среды 0,1 МПа, температурный коэффициент расширения воздуха αг=1/273 К, изменение температуры в процессе эксплуатации составляет ΔT=100 К, тогда изменение давления во внутренней полости датчика в процессе эксплуатации составит ΔР=P0·αг·ΔТ=0,037 МПа. Это составляет 37% от номинального измеряемого давления, и, следовательно, аддитивная температурная погрешность такого датчика составляет 37% в диапазоне температур ΔT=100 К, что недопустимо и требует специальных методов компенсации.
Как было уже показано, герметизация внутренней полости приводит к появлению значительных дополнительных температурных погрешностей, поэтому при настройке таких датчиков необходимо учитывать эту особенность. Как правило, учет фактора герметизации осуществляется двумя способами.
Первый способ заключается в том, что настройку датчика по температурным характеристикам производят в разгерметизированном корпусе, а герметизацию производят в вакууме. Тем самым исключается влияние температурного расширения газа, заключенного во внутреннем объеме датчика. При этом чувствительный элемент датчика получает предварительную деформацию. Данный способ используется при конструировании датчиков абсолютного давления.
Датчик относительного давления выполняется герметичным, во внутренней полости которого герметизируется заданное фиксированное давление либо воздуха, либо инертного газа, например аргона. При этом исключить влияние расширения газа во внутренней полости датчика на температурные погрешности не удается. Второй способ заключается в том, что исключение этих влияний на температурные погрешности осуществляется за счет компенсационного элемента (например, термозависимого компенсационного резистора Rβ). Поэтому настройку датчика по температурным характеристикам осуществляют без предварительной герметизации (по аналогии с первым способом), определенную же в процессе настройки величину компенсационного элемента корректируют на величину, необходимую для компенсации температурного расширения газа внутренней полости.
Рассмотрим учет влияния герметизации внутренней полости на примере датчика давления, во внутренней полости которого загерметизировано давление воздуха P0.
Рассмотрение будем проводить на примере тензорезисторного датчика с мостовой измерительной цепью.
Приращение давления внутренней полости от изменения температуры равно:

где 1/273 - температурный коэффициент расширения воздуха;
P0 - давление в загерметизированной полости при исходной температуре;
ΔT - перепад температуры при испытании.
Тогда выходной сигнал мостовой измерительной цепи от расширения газа, заключенного во внутренней полости датчика, может быть представлен в виде:

где  - чувствительность датчика к измеряемому давлению;
- чувствительность датчика к измеряемому давлению;
Uн=Uвых-U0 - номинальный выходной сигнал датчика (девиация выходного сигнала) при воздействии номинального значения измеряемого давления Рн;
Uвых - выходной сигнал датчика при воздействии номинального значения измеряемого давления Рн;
U0 - начальный разбаланс датчика без измеряемого давления.
Знак минус ставится в связи с тем, что воздействие на УЭ расширения газа внутренней полости аналогично воздействию измеряемого давления, но имеет противоположное направление.
Для выражения номинального выходного сигнала датчика через относительное изменение сопротивления тензорезисторов воспользуемся функцией преобразования измерительной цепи (см. Проектирование датчиков для измерения механических величин. Под редакцией Е.П.Осадчего, 1979)

где Uпит - напряжение питания мостовой измерительной цепи;
k=R1/R2=R3/R4 - коэффициент симметрии мостовой измерительной цепи;
 - суммарное относительное изменение сопротивлений тензорезисторов мостовой измерительной цепи при номинальном значении измеряемого параметра;
- суммарное относительное изменение сопротивлений тензорезисторов мостовой измерительной цепи при номинальном значении измеряемого параметра;
εri=ΔRi/Ri - относительное изменение сопротивления i-го тензорезистора от воздействия номинального значения измеряемого параметра;
ΔR1 - абсолютное изменение сопротивления i-го тензорезистора от номинального значения измеряемого параметра;
Ri - номинал i-го сопротивления тензорезистора.
Для того чтобы перейти к эквивалентному относительному изменению сопротивления одного из плеч (например, плеча R1) мостовой измерительной цепи при воздействии расширения газа внутренней полости, обратимся к функции преобразования измерительной цепи.

где εrэ=Rэ/R1 - эквивалентное, приведенное к плечу R1, относительное изменение сопротивление мостовой измерительной цепи при расширении газа внутренней полости;
Rэ - эквивалентное изменение сопротивления R1 при расширении газа внутренней полости.
Приравнивая выражения (2) и (4) и решая относительно Rэ, можно определить эквивалентное изменение сопротивления плеча мостовой измерительной цепи при расширении газа внутренней полости датчика, выраженное через чувствительность датчика к измеряемому давлению:

Но с другой стороны, аналогичное, приведенное к одному плечу изменение Rэ, может быть создано за счет изменения от температуры термозависимого компенсационного резистора Rβ. Изменение термозависимого компенсационного резистора Rβ при воздействии температуры может быть записано в виде:

где αβ - ТКС компенсационного резистора Rβ.
Для возможности учета влияния изменений внутреннего давления и термозависимого компенсационного резистора от температуры на ТКС мостовой цепи (αr) необходимо их влияния на сопротивление плеч мостовой цепи перевести в эквивалентные изменения ТКС этих плеч. Для этого определим эквивалентные изменения ТКС плеч мостовой цепи при изменении внутреннего давления и термозависимого компенсационного резистора от изменения температуры.
Эквивалентное значение изменения ТКС плеча, к которому приведено относительное изменение сопротивления от изменения внутреннего давления, можно определить, если принять, что приведенное к плечу R1 изменение сопротивления по формуле (5) эквивалентно его изменению при добавлении к его ТКС эквивалентного ТКС αэ, обеспечившее данное изменение, то есть

Приравнивая выражения (5) и (7), заменяя Uн через относительное изменение сопротивления в соответствии с (3) и решая относительно эквивалентного значения ТКС (αэ), получим:
Полученное выражение справедливо при приведении Up к плечу R1, при приведении же к плечу R2 эквивалентный ТКС будет иметь положительное значение, так как Up имеет знак, противоположный выходному сигналу от измеряемого параметра, и, следовательно, изменение внутреннего давления влечет уменьшение сопротивлений R1, R4 и увеличение сопротивлений R2, R3.
Тогда эквивалентное значение ТКС мостовой цепи от расширения газа, загерметизированного во внутренней полости датчика, в общем виде, независимо от плеча, к которому он приводится, можно записать без учета знака, а учет знака производить при расчете термозависимого компенсационного резистора после определения плеча, к которому будет приводится αэ, то есть:
Поэтому перед началом компенсации необходимо определить плечо, к которому нужно приводить как эквивалентное изменение давления внутренней полости, так и изменение сопротивления компенсационного резистора. Выбор плеча, к которому производят вышеуказанные приведения, основан на определении температурного изменения начального разбаланса в сбалансированном датчике, то есть перед началом компенсации аддитивной температурной погрешности датчика необходимо провести балансировку мостовой измерительной цепи. Так как наличие предварительной несбалансированности датчика искажает его аддитивную температурную погрешность вплоть до изменения знака (см. патент на изобретение №2231752 от 27 июня 2004 г.), то предварительную балансировку датчика необходимо произвести в пределах ±0,5% номинального выходного сигнала. Температурный же уход начального разбаланса определяется соотношением температурного ухода от технологического разброса ТКС тензорезисторов с учетом балансировки мостовой цепи из условия αr=(α1+α4)-(α2+α3) и ухода начального разбаланса от изменения внутреннего давления при изменении температуры, то есть αэ.
Тогда плечо подключения термозависимого компенсационного резистора определится как:
- если αэ>αr, при αr любого знака, или αэ<αr, при αr отрицательном, то приведение необходимо осуществлять к плечу R1;
- если αэ<αr, при αr положительном, то приведение необходимо осуществлять к плечу R2.
1. Для случая приведения температурных изменений к плечу R1.
Эквивалентный ТКС от изменения внутреннего давления при изменении температуры αэ определяется согласно выражению (8) и имеет знак минус. Приведенное значение ТКС при подключении в плечо R1 термозависимого компенсационного резистора Rβ можно определить следующим образом. Сопротивление плеча R1 при подключении Rβ можно определить как Rn=R1+Rβ, а его приращение при изменении температуры
ΔRnt=R1·α1·Δt+Rβ·αβ·Δt.
Но с другой стороны, приращение сопротивления плеча при изменении температуры можно выразить через приведенное значение ТКС плеча
ΔRnt=(R1+Rβ)·αn·Δt.
Тогда, приравнивая два последних выражения и решая относительно αn, можно определить ТКС плеча R1 с подключенным термозависимым компенсационным резистором Rβ.

Тогда из условия компенсации аддитивной температурной погрешности (αn-αэ+α4)-(α2+α3)=0. Откуда можно определить приведенное значение ТКС плеча для условия компенсации как аддитивной температурной погрешности мостовой цепи, так и изменения внутреннего давления от изменения температуры

Приравнивая два последних выражения и решая относительно термозависимого компенсационного резистора Rβ, получим его величину, необходимую для компенсации аддитивной температурной погрешности, как от температурного изменения плеч мостовой цепи, так и от изменения давления во внутренней полости датчика при изменении температуры

2. Для случая приведения температурных изменений к плечу R2.
Эквивалентный ТКС от изменения внутреннего давления при изменении температуры αэ определяется согласно выражению (8) и имеет знак плюс. Приведенное значение ТКС при подключении в плечо R2 термозависимого компенсационного резистора Rβ, в соответствии с выражением (9), будет иметь вид:
Тогда из условия компенсации аддитивной температурной погрешности (α1+α4)-(αn+αэ+α3)=0. Откуда можно определить приведенное значение ТКС плеча для условия компенсации как аддитивной температурной погрешности мостовой цепи, так и изменения внутреннего давления от изменения температуры
αn=α1+α4-α3-αэ.
Приравнивая два последних выражения и решая относительно термозависимого компенсационного резистора Rβ, получим его величину, необходимую для компенсации аддитивной температурной погрешности, как от температурного изменения плеч мостовой цепи, так и от изменения давления во внутренней полости датчика при изменении температуры

Тогда в общем виде выражение для расчета величины термозависимого компенсационного резистора при подключении его в любое плечо мостовой цепи будет иметь вид

где αc1, αс2, αn - ТКСы смежных и противолежащего плеч мостовой цепи относительно плеча, в которое устанавливается термозависимый компенсационный резистор, с учетом предварительной балансировки соответственно;
Ri - номинал сопротивления тензорезистора с учетом предварительной балансировки, к которому подключается термозависимый компенсационный резистор;
арифметические знаки (+) и (-) берутся по верхним значениям при установке термозависимого компенсационного резистора в плечи, воспринимающие деформацию растяжения, а по нижним значениям при установке термозависимого компенсационного резистора в плечи, воспринимающие деформацию сжатия.
3. При равных абсолютных значениях ТКС мостовой измерительной цепи и эквивалентного ТКС от изменения внутреннего давления при изменении температуры, то есть |αr|=αэ, то при положительном значении αr произойдет взаимная компенсация аддитивных температурных погрешностей, а при отрицательном значении αr компенсацию необходимо осуществлять подключением термозависимого компенсационного резистора в плечо R1.
4. Для оценки величины термозависимого компенсационного резистора только для компенсации аддитивной температурной погрешности от изменения давления во внутренней полости датчика при изменении температуры необходимо принять ТКС мостовой цепи, равной нулю. Тогда для условия α1=α2=α3=αr4=α приведение всех температурных изменений необходимо производить к плечу R1, а величину термозависимого компенсационного резистора необходимо рассчитывать по формуле

Для оценки влияния загерметизированного во внутренней полости датчика фиксированного значения давления на величину термозависимого компенсационного резистора рассмотрим пример компенсации аддитивной температурной погрешности датчика относительного давления с герметичной внутренней полостью.
Пример
Рассчитать компенсационный резистор Rβ для компенсации аддитивной температурной погрешности датчика относительного давления с загерметизированным во внутренней полости аргоном давлением 0,1 МПа и равноплечей измерительной мостовой цепью, если известно:
- ТКСы тензорезисторов для сбалансированной измерительной цепи соответственно равны: α1=1,4·10-4 1/°С; α2=1,3·10-4 1/°С; α3=1,45·10-4 1/°С; α4=1,4·10-4 1/°С;
- номинальное измеряемое давление Рн=0,1 МПа;
- сопротивление тензорезистора R=1000 Ом;
- выходной сигнал датчика в относительных единицах при номинальном давлении 
- принять ТКС термозависимого компенсационного резистора αβ=4·10-3 1/°С.
Решение
Для определения плеча, к которому необходимо привести изменение от загерметизированного в датчике давления при изменении температуры и разброса ТКС тензорезисторов, необходимо оценить эквивалентное значение ТКС от изменения внутреннего давления и ТКС мостовой измерительной схемы из-за технологического разброса ТКС тензорезисторов. Эквивалентное значение ТКС от изменения давления внутренней полости при изменении температуры можно определить по формуле (8)

а ТКС мостовой цепи можно определить из условия компенсации аддитивной погрешности, считая, что при равенстве всех сопротивлений плеч мостовой цепи начальный разбаланс датчика равен нулю
αr=(1,4+1,4)·10-4-(1,3+1,45)·10-4=0,5·10-4 1/°C.
Так как αэ<αr и αr имеет положительное значение, то приведение всех изменений необходимо провести к плечу R2. Тогда расчет термозависимого компенсационного резистора нужно проводить по формуле (12)

Сопротивление термозависимого компенсационного резистора для компенсации только температурного изменения внутреннего давления можно определить по формуле (13), приведя все изменения к плечу R1 и приняв ТКС всех плеч мостовой цепи равными ТКС плеча R1:

Таким образом, величина термозависимого компенсационного резистора для компенсации аддитивной температурной погрешности от расширения газа, загерметизированного во внутренней полости датчика, имеет тот же порядок, что и термозависимый компенсационный резистор для компенсации как от расширения газа, так и от технологического разброса ТКС плеч мостовой цепи. Более того, термозависимый компенсационный резистор для компенсации расширения газа, загерметизированного во внутренней полости датчика, необходимо устанавливать в соседнее плечо мостовой цепи, по сравнению с термозависимым компенсационным резистором для компенсации как от расширения газа, так и от технологического разброса ТКС плеч мостовой цепи. Это говорит о том, что оба фактора влияют противоположно на аддитивную температурную погрешность и взаимно компенсируют друг друга, а термозависимый компенсационный резистор Rβ необходим для исключения их недокомпенсации.
Датчик перед началом испытаний балансируют. Определяют температурные коэффициенты сопротивления (ТКС) всех плеч мостовой цепи с учетом балансировочного резистора. Определяют начальный разбаланс датчика и выходной сигнал датчика при номинальном давлении. Рассчитывают эквивалентное значение ТКС мостовой цепи датчика от температурного расширения фиксированного значения давления газа, загерметизированного во внутренней полости датчика. Определяют плечо установки термозависимого компенсационного резистора из условия, приведенного в формуле изобретения, и включают термозависимый компенсационный резистор последовательно с рабочим тензорезистором. В формуле изобретения приводится зависимость для расчета номинала сопротивления компенсационного резистора. Технический результат заключается в повышении точности настройки тензорезисторных датчиков по аддитивной температурной погрешности.
Способ минимизации аддитивной температурной погрешности тензорезисторных датчиков относительного давления с герметичной внутренней полостью и мостовой измерительной цепью, заключающийся в определении величины термозависимого компенсационного резистора и последующем включении его в одно из плеч мостовой цепи последовательно с рабочим тензорезистором с одновременной балансировкой, отличающийся тем, что осуществляют предварительную балансировку датчика в пределах ±0,5% номинального выходного сигнала, определяют температурные коэффициенты сопротивления (ТКС) всех плеч мостовой цепи с учетом балансировочного резистора и рассчитывают температурный коэффициент мостовой цепи по формуле αr=(α1+α4)-(α2+α3), где α1 и α4 - ТКС плеч мостовой цепи с учетом балансировочного резистора для тензорезисторов R1 и R4, воспринимающих деформацию растяжения от измеряемого параметра; α2 и α3 - ТКС плеч мостовой цепи с учетом балансировочного резистора для тензорезисторов R2 и R3, воспринимающих деформацию сжатия от измеряемого параметра, определяют начальный разбаланс U0 и выходной сигнал датчика Uвых при воздействии номинального измеряемого давления Рн и рассчитывают эквивалентное значение ТКС мостовой цепи датчика от температурного расширения фиксированного значения давления газа, загерметизированного во внутренней полости датчика, по формуле
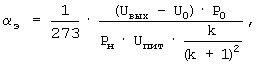
где 1/273 - температурный коэффициент расширения воздуха;
Р0 - давление в загерметизированной полости датчика при исходной температуре;
Uпит - напряжение питания мостовой измерительной цепи;
k=R1/R2=R3/R4 - коэффициент симметрии мостовой измерительной цепи,
определяют плечо установки термозависимого компенсационного резистора Rβ из условия:
если αэ>αr при αr любого знака или αэ<αr при αr отрицательном, то приведение необходимо осуществлять к одному из плеч, воспринимающему деформацию растяжения;
если αэ<αr при αr положительном, то приведение необходимо осуществлять к одному из плеч, воспринимающему деформацию сжатия,
величину термозависимого компенсационного резистора для одновременной компенсации аддитивной температурной погрешности измерительной схемы датчика и аддитивной температурной погрешности от расширения фиксированного давления газа, загерметизированного во внутренней полости одним термозависимым компенсационным резистором, определяют по формуле
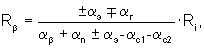
где αc1, αc2, αn - ТКС смежных и противолежащего плеч мостовой цепи относительно плеча, в которое устанавливается компенсационный резистор, с учетом предварительной балансировки соответственно;
Ri - номинал сопротивления тензорезистора с учетом предварительной балансировки, к которому подключается компенсационный резистор;
αβ - ТКС компенсационного резистора,
арифметические знаки (+) и (-) берутся по верхним значениям при установке термозависимого компенсационного резистора в плечи, воспринимающие деформацию растяжения, а по нижним значениям при установке термозависимого резистора в плечи, воспринимающие деформацию сжатия, устанавливают термозависимый компенсационный резистор в выбранное плечо последовательно с рабочим тензорезистором и осуществляют балансировку мостовой схемы без изменения ТКС балансируемого плеча.
| СГИБОВ А.П | |||
| Температурная компенсация ухода нуля мостового преобразователя | |||
| Приборы и системы управления | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| DE 3528510 A1, 20.03.1986 | |||
| Способ настройки интегральных тензомостов | 1978 |
|
SU691682A1 |

