Изобретение относится к измерительной технике и может быть использовано при настройке тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности.
Известен способ компенсации аддитивной температурной погрешности мостовой схемы (см. "Проектирование датчиков для измерения механических величин" под редакцией Е.П.Осадчего, 1979 г.), заключающийся в установке в определенное плечо термозависимого компенсационного резистора Rβ с последующей балансировкой мостовой схемы. Расчет компенсационного резистора производится по формуле

где Ri - номинал тензорезистора плеча мостовой схемы, последовательно с которым подключается компенсационный резистор;
αr - температурный коэффициент сопротивления (ТКС) мостовой измерительной цепи;
αβ - ТКС компенсационного резистора.
Однако использование данного метода при настройке датчиков имеет ряд недостатков:
1. Описанный способ не предусматривает предварительную балансировку мостовой схемы, так как в исходном состоянии датчик не сбалансирован, а наличие несбалансированности мостовой схемы приводит к появлению дополнительной аддитивной температурной погрешности, которая может полностью исказить аддитивную температурную погрешность датчика, вплоть до смены знака.
Действительно, наиболее общим случаем технологического разброса тензорезисторов мостовой измерительной цепи по номиналу и ТКС тензорезисторов является - R1≠R2≠R3≠R4 и α1≠α2≠α3≠α4.
Для упрощения математических выкладок приведем разбросы по номиналам резистроров к одному плечу (например, к плечу R1). При этом сопротивление плеча R1, при котором мостовая цепь будет сбалансирована, станет равным

где Rэ - эквивалентное изменение плеча R1, при котором схема будет сбалансирована.
Величина Rэ находится из условия баланса мостовой цепи:

тогда 
Откуда

Из формулы видно, что Rэ может иметь как положительные, так и отрицательные значения. При отрицательном значении необходимо изменить плечо, к которому необходимо привести разброс сопротивлений мостовой цепи (например, к плечу R2 или R3). Для упрощения вывода аналитической зависимости аддитивной температурной погрешности от предварительной несбалансированности мостовой измерительной цепи целесообразно перейти к эквивалентной мостовой цепи с равными значениями сопротивления во всех плечах, а реальный разбаланс цепи получить за счет включения в одно из плеч (например, плечо R1) эквивалентного резистора, определенного по формуле (1). Однако для того, чтобы произвести подобную замену, необходимо доказать, что замена реальной сбалансированной мостовой цепи с неравными сопротивлениями плеч на эквивалентную с равными сопротивлениями не приведет к появлению дополнительной аддитивной температурной погрешности.
Для этого рассмотрим частный случай, когда R1≠R2≠R3≠R4, но схема сбалансирована, то есть R1·R4=R2·R3 и α1≠α2≠α3≠α4. Тогда, воспользовавшись уравнением выходного сигнала мостовой схемы

можно найти выходной сигнал мостовой цепи при воздействии температуры Uвыхt, заменив Rti=Ri·(1+αi·Δt) и пренебрегая величинами второго порядка малости, можно записать

Разделив числитель и знаменатель полученного выражения на R2·R4 и введя понятие коэффициента симметрии  , можно эту формулу представить в виде:
, можно эту формулу представить в виде:

Для вывода аналитического выражения аддитивной температурной чувствительности необходимо найти аналитическое выражение для выходного сигнала мостовой цепи при воздействии номинального значения измеряемого параметра. Для этого воспользуемся выражением (1) и с учетом относительных изменений сопротивлений  при воздействии измеряемого параметра, запишем его в виде:
при воздействии измеряемого параметра, запишем его в виде:

Разделив числитель и знаменатель полученного выражения на R2·R4 введя понятие коэффициента симметрии k=R1/R2=R/R4, учитывая, что εr2 и εr3 имеют противоположные знаки по отношению к εr1 εr4, и пренебрегая величинами второго порядка малости, можно эту формулу представить в виде:

Тогда можно определить аддитивную температурную чувствительность сбалансированной мостовой цепи при неравенстве сопротивлений плеч:

Если провести подобный вывод для мостовой схемы с равными сопротивлениями, то в конечном итоге придем к выражению (4). А это говорит о том, что неравенство сопротивлений сбалансированной мостовой схемы не приводит к появлению дополнительной температурной погрешности по сравнению со схемой, у которой все плечи равны.
Используя это свойство мостовой цепи, введем понятие среднего эквивалентного значения сопротивления плеча. Так как аддитивная температурная погрешность не изменится, если плечи сбалансированного реального датчика R1, R2, R3, R4 заменить плечами R1э=R2э=R3э=R4э=Rпэ, тогда приведя замену для существующей несбалансированной реальной схемы, можно найти эквивалентное приведенное сопротивления R1п:
R1п=Rпэ-Rэ,
где  - среднее эквивалентное сопротивление плеча мостовой цепи.
- среднее эквивалентное сопротивление плеча мостовой цепи.
Таким образом, для существующей реальной несбалансированной мостовой цепи с сопротивлениями плеч R1=R2=R3=R4 можно подобрать эквивалентную мостовую цепь с сопротивлениями плеч R1=R1п=Rпэ-Rэ, R2=Rпэ, R3=Rпэ, R4=Rпэ, которая будет иметь как величину предварительной несбалансированности, так и аддитивную температурную погрешность, аналогичные реальной несбалансированной мостовой цепи. Температурный коэффициент (αэ) эквивалентного сопротивления Rэ можно определить, исходя из выражения изменения сопротивления эквивалентного сопротивления от изменения температуры ΔRэt=Rэ·αэ·Δt:
где Rэt - номинал эквивалентного сопротивления при изменении температуры на Δt.
Подставляя в выражение (6) уравнение (1) и выражение Rэt через значение сопротивлений реальной мостовой цепи и их ТКС, можно записать:

Имея эквивалентную схему замещения и зная ее параметры, можно определить выходной сигнал датчика с учетом предварительной несбалансированности при воздействии температуры. Подставляя значения эквивалентных параметров схемы в формулу выходного сигнала мостовой цепи (3), можно записать:
Произведя математические преобразования и пренебрегая величинами второго порядка малости, получим:
Для количественной оценки влияния предварительной несбалансированности на температурную погрешность датчика необходимо определить аддитивную температурную чувствительность. Принимая для мостовой измерительной цепи с равными сопротивлениями плеч коэффициент симметрии k=1, можно записать нормированный выходной сигнал, по аналогии с выражением (4) в виде  . Тогда, подставляя значения Ny и Uвыхt в уравнение аддитивной температурной чувствительности, можно представить аддитивную температурную чувствительность несбалансированной мостовой цепи в виде:
. Тогда, подставляя значения Ny и Uвыхt в уравнение аддитивной температурной чувствительности, можно представить аддитивную температурную чувствительность несбалансированной мостовой цепи в виде:
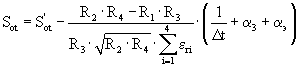
Первое слагаемое полученного выражения представляет собой аддитивную температурную чувствительность сбалансированной мостовой цепи, поэтому, обозначая ее через Sot', в общем виде аддитивную температурную чувствительность несбалансированной мостовой цепи можно представить следующим образом:

Таким образом, предварительная несбалансированность мостовой измерительной цепи дает дополнительную температурную погрешность, выраженную в виде второго члена выражения (8).
Рассуждая аналогично, можно определить аддитивную температурную чувствительность тензорезисторного датчика с предварительной несбалансированностью, приведенной к любому из плеч мостовой измерительной цепи. При приведении несбалансированности к плечу R2:



При приведении несбалансированности к плечу R3:



При приведении несбалансированности к плечу R4:



В таблице 1 приведены все возможные случаи исполнения тензорезисторных датчиков с точки зрения технологических разбросов по номиналам и ТКС тензорезисторов и расчетные соотношения для определения аддитивной температурной чувствительности.
Анализ полученных формул показывает:
В зависимости от знака разбаланса последний может как уменьшать, так и увеличивать аддитивную температурную погрешность. При положительном разбалансе (Rэ включается в плечо R2 или R3) положительная погрешность будет увеличиваться, а отрицательная - уменьшаться. При отрицательном разбалансе (Rэ включается в плечо R1 или R4) положительная погрешность будет уменьшаться, а отрицательная - увеличиваться. Отсюда следует возможность компенсации существующей аддитивной температурной погрешности датчика за счет предварительного разбаланса мостовой измерительной цепи.
В связи с тем что влияние начальной несбалансированности мостовой цепи на аддитивную температурную погрешность незначительно (для компенсации реальных значений Sot, равных 1·10-41/°C, требуется несбалансированность мостовой цепи несколько десятков процентов номинального выходного сигнала), то компенсация за счет предварительной несбалансированности является нецелесообразной.
R1·R4=R2·R3
при
α1+α3=α2+α4
R1·R4=R2·R3
R1·R4=R2·R3
В связи с тем что чувствительность к температуре предварительной несбалансированности мостовой цепи зависит от температуры, функция преобразования является нелинейной. Поэтому на практике компенсацию за счет предварительной несбалансированности не используют, так как характеристика нелинейная, то учет этой погрешности затруднен. Поэтому стараются имеющимися способами (технологические, конструктивные, схемные) получить минимально возможный разбаланс.
Даже в случае выполнения равенства ТКС всех плеч датчик будет обладать аддитивной температурной погрешностью при наличии предварительной несбалансированности.
При наличии неравенства ТКС плеч для уменьшения аддитивной температурной погрешности необходимо как минимум иметь равенство R1·R4=R2·R3, то есть мостовая схема должна быть сбалансирована.
2. Аналитические выражения для расчета компенсационного резистора предусматривают определение температурного коэффициента мостовой схемы αr через выходные сигналы датчика при разных значениях температуры. Однако физический смысл αr состоит в оценке разбросов ТКС тензорезисторов, а так как выходной сигнал датчика при изменении температуры зависит не только от разброса ТКС тензорезисторов, но и от начальной несбалансированности мостовой схемы и температурного коэффициента тензочувствительности датчика, то расчетное значение αr будет иметь значительные расхождения с его действительным значением и, как результат, значительные погрешности в определении компенсационного резистора.
3. В описанном способе при выводе формулы для расчета компенсационного резистора Rβ учитывается только ТКС тензорезистора, к которому производят подключение Rβ, а в изменении начального уровня выходного сигнала от температуры участвуют все четыре рабочих тензорезистора и их ТКСы, поэтому появляются значительные погрешности при определении компенсационного резистора.
Поэтому данный способ компенсации в том виде, в котором представлен в прототипе, при производстве датчиковой аппаратуры не обеспечивает требуемые точности компенсации аддитивной температурной погрешности. Однако сама идея компенсации с помощью включения термозависимого резистора в одно из плеч мостовой схемы последовательно с рабочим тензорезистором с одновременной балансировкой начального уровня мостовой схемы не только жизненна, но и целесообразна.
Сущность изобретения заключается в следующем.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности, который позволил бы повысить технологичность и точность компенсации аддитивной температурной погрешности в процессе настройки.
Технический результат - повышение технологичности и точности в процессе настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности.
Указанный технический результат достигается тем, что расчет термозависимого компенсационного резистора производят для предварительно сбалансированной мостовой схемы из условия выравнивания сумм ТКС тензорезисторов, попарно находящихся в противолежащих плечах мостовой схемы с последующей балансировкой.
Это достигается тем, что датчик перед началом испытаний балансируется с помощью балансировочного резистора в пределах ±0,5% номинального выходного сигнала датчика от измеряемого параметра. При наличии у датчика положительного начального уровня выходного сигнала балансировочный резистор включают в одно из плеч мостовой схемы последовательно с тензорезисторами, воспринимающими деформацию сжатия, а при отрицательном - последовательно с тензорезисторами, воспринимающими деформацию растяжения.
После балансировки мостовой схемы необходимо определить ТКСы ее всех четырех плеч, так как введение последовательно с рабочим тензорезистором балансировочного резистора приводит к изменению ТКС плеча мостовой схемы.
Датчик со сбалансированной мостовой схемой помещают в термокамеру и снимают значения начальных уровней выходных сигналов при нормальной температуре и температуре эксплуатации. По знаку изменения начального уровня выходного сигнала некомпенсированного, но сбалансированного датчика при изменении температуры в положительную сторону определяют плечо включения компенсационного сопротивления. Это становится возможным в связи с тем, что аддитивная температурная погрешность сбалансированной мостовой схемы, компенсацию которой производят за счет включения термозависимого компенсационного резистора последовательно одному из плеч, зависит только от разницы сумм ТКС тензорезисторов, попарно расположенных в противолежащих плечах, и не зависит от величины предварительной несбалансированности. При этом при положительном уходе начального уровня выходного сигнала от температуры термозависимый компенсационный резистор подключают последовательно тензорезисторам, воспринимающим деформацию сжатия от измеряемого параметра, а при отрицательном уходе - последовательно тензорезисторам, воспринимающим деформацию растяжения. Расчет номинала термозависимого компенсационного резистора производят исходя из того, что аддитивная температурная погрешность сбалансированной мостовой схемы зависит только от равенства сумм ТКС тензорезисторов, попарно расположенных в противолежащих плечах мостовой схемы.
Термозависимый компенсационный резистор расчетной величины устанавливают в ранее определенное плечо мостовой схемы и одновременно производят ее балансировку по методике, изложенной ранее для предварительной балансировки без влияния на ТКС балансируемого плеча (например, с помощью лазерной подгонки резистора для микроэлектронного исполнения датчика).
Способ осуществляется следующим образом.
В предлагаемом способе, как и в случае компенсации по прототипу, компенсация достигается за счет выравнивания ТКС тензорезисторов, включенных в противоположные плечи мостовой измерительной цепи с одновременной балансировкой мостовой схемы.
Он основан на том, что изменение начального уровня выходного сигнала сбалансированной мостовой схемы зависит только от разбросов ТКС резисторов. А это означает, что для компенсации аддитивной температурной погрешности необходимо выполнить условие баланса мостовой схемы при воздействии температуры, которое согласно формуле (5) будет определяться равенством (α1+α4)-(α2+αз)=0, то есть необходимо выровнить ТКСы тензорезисторов.
Для этого вначале производят балансировку мостовой схемы с помощью балансировочного резистора в пределах ±0,5% номинального выходного сигнала (например, переменный резистор), что позволяет при расчете термозависимого компенсационного резистора пренебречь влиянием несбалансированности датчика на аддитивную температурную погрешность. Плечо подключения балансировочного резистора определяется по знаку несбалансированности датчика: при положительном начальном уровне выходного сигнала мостовой схемы резистор подключается либо в плечо R2, либо в плечо R3 (противолежащие плечи, воспринимающие деформацию сжатия), а при отрицательном - в плечо R1 или R4 (противолежащие плечи, воспринимающие деформацию растяжения). Номинал балансировочного резистора определяется экспериментальным путем после подключения переменного резистора в выбранное плечо.
Для сбалансированной мостовой схемы определяют ТКСы плеч с учетом включения балансировочного резистора при предварительной балансировке, что необходимо для дальнейшего расчета компенсационного резистора.
Затем производят определение начальных уровней выходных сигналов с датчика при нормальной температуре и при температуре эксплуатации, что необходимо для определения плеча установки компенсационного резистора. Так как при компенсации термозависимым компенсационным резистором Rβ с ТКС, большим, чем ТКС плеча, включаемым последовательно одному из плеч мостовой схемы, приводит к увеличению как номинала общего сопротивления плеча, так и его ТКС, то, исходя из условия компенсации можно определить плечо подключения термозависимого компенсационного резистора:
- при увеличении начального уровня выходного сигнала датчика с ростом температуры термозависимый компенсационный резистор Rβ подключается последовательно либо плечу R2, либо плечу R3, с одновременной балансировкой мостовой цепи без изменения его ТКС;
- при уменьшении начального уровня выходного сигнала датчика с ростом температуры термозависимый компенсационный резистор Rβ подключается последовательно либо плечу R1, либо плечу R4, с одновременной балансировкой мостовой цепи без изменения его ТКС.
При подключении термозависимого компенсационного резистора Rβ последовательно одному из плеч мостовой цепи (например, R1) общее сопротивление плеча станет равным сумме сопротивлений R1+Rβ. При изменении температуры Rобщ1 примет вид:

где α1 - ТКС тензорезистора R1;
αβ - ТКС компенсационного резистора Rβ;
Δt - диапазон изменения температуры.
Но, с другой стороны, Rобщ1t может быть записано через эквивалентное ТКС плеча Rобщ1 в виде:

где αэ - эквивалентное ТКС плеча Rобщ1.
Тогда, решая две последние формулы относительно αэ, найдем выражение эквивалентного ТКС плеча Rобщ1, выраженное через ТКС тензорезисторов R1 и Rβ:

Зная эквивалентное ТКС плеча Rобщ1, можно записать условие компенсации аддитивной температурной погрешности для датчика с подключенным термозависимым компенсационным резистором Rβ:
αэ+α4=α2+α3,
откуда можно найти значение эквивалентного ТКС плеча Rобщ через ТКСы остальных рабочих плеч

Приравнивая уравнения (9) и (10) и решая относительно Rβ, можно определить номинал термозависимого компенсационного резистора, необходимый для компенсации аддитивной температурной погрешности, выраженный через ТКСы рабочих тензорезисторов.

При подключении термозависимого компенсационного резистора не только к плечу R1, но и к противолежащему плечу мостовой схемы R4, определенному в соответствии с проведением операций по предлагаемому способу, выражение (11) может быть записано в общем виде
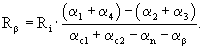
При подключении термозависимого компенсационного резистора в плечи, воспринимающие деформацию сжатия, то есть в плечи R2 или R3, выражение (11) может быть записано в виде

где Ri - номинал сопротивления тензорезистора плеча, к которому подключается термозависимый компенсационный резистор;
αc1, αc2, αn - температурные коэффициенты сопротивления тензорезисторов смежных и противолежащего плеч схемы относительно плеча, к которому подключают термозависимый компенсационный резистор;
α1, α2, α3, α4 - температурные коэффициенты сопротивления тех же тензорезисторов, привязанных к присвоенному номеру плеча мостовой схемы.
После установки термозависимого компенсационного резистора производят балансировку мостовой схемы экспериментальным путем либо за счет последовательного подключения к определенному тензорезистору балансировочного сопротивления с ТКС, равным ТКС тензорезистора, либо с помощью лазерной подгонки выбранного тензорезистора при микроэлектронном исполнении датчика. Способ определения плеча и номинала балансировочного резистора изложен в описании при определении балансировочного резистора в процессе предварительной балансировки.
Анализ полученных выражений (12) показывает, что при принятии решения о равенстве (α1+α4)-(α2+α3)=αr получаем выражение для расчета компенсационного резистора, аналогичное с прототипом, только в полученных выражениях дополнительно производится учет ТКС плеч мостовой схемы, не участвующих в процессе компенсации температурной погрешности.
Предлагаемый способ компенсации позволяет простыми методами выбрать вариант схемы компенсации. Повышение точности определения величины компенсационного резистора по сравнению с прототипом можно показать на примере. Рассмотрение будем производить с исключением двух недостатков из трех описанных выше у прототипа:
- для исключения предварительной несбалансированности мостовой цепи будем считать, что мостовая цепь сбалансирована перед настройкой и все четыре сопротивления равны;
- для исключения погрешности, вносимой определением температурного коэффициента αr согласно прототипу, примем (α1+α4)-(α2+α3)=αr, то есть ТКС мостовой цепи зависит только от разброса ТКС плеч мостовой цепи.
Таким образом, оценим только погрешность прототипа и предлагаемого метода исходя из различного подхода к определению номинала компенсационного резистора.
Пример
Исходные данные:
- сопротивления тензорезисторов R1=R2=R3=R4=1000 Ом;
- ТКСы тензорезисторов равны 4,9·10-4 1/°С с технологическим разбросом ±2%, при этом максимальная аддитивная погрешность будет при условии α1=α4=5·10-4 1/°С; α2=α3=4,8·10-4 1/°С;
- ТКС термозависимого компенсационного резистора, изготовленного из никеля αβ=4·10-3 1/°С;
- напряжение питания мостовой схемы Uпит=10 В;
- суммарное значение относительного изменения сопротивления мостовой схемы датчика при воздействии номинального измеряемого параметра  ;
;
- диапазон изменения воздействующих температур ΔT=100°С;
- допустимое значение аддитивной температурной чувствительности датчика после настройки Sot д=1·10-4 1/°С.
Решение
В начале оценим величину аддитивной температурной чувствительности до настройки датчика по формуле (5)

Полученное значение аддитивной температурной чувствительности недопустимо согласно исходным данным, поэтому необходимо произвести компенсацию температурной погрешности датчика.
В связи с тем что значение ТКС мостовой измерительной схемы αr=(5+5)·10-4-(4,8+4,8)·10-4=0,4·10-41/°С имеет положительное значение, то при изменении температуры в положительную сторону начальный разбаланс мостовой схемы будет также изменяться в положительную сторону. Следовательно, установку термозависимого компенсационного резистора необходимо производить в плечо R2 или R3.
Номинал термозависимого компенсационного резистора:
- согласно прототипу
- согласно предлагаемому методу

Для балансировки мостовой схемы после введения в плечо R2 термозависимого компенсационного резистора необходимо включить в соседнее плечо (например, плечо R1), балансировочное сопротивление номиналом Rбал = Rβ. При этом ТКС балансировочного резистора должен быть равен ТКС тензорезистора, последовательно с которым включается балансировочный резистор. В этом случае при исходной температуре начальный разбаланс скомпенсированного датчика будет равен нулю по обоим методам настройки.
Сопротивления и ТКС плеч скомпенсированной схемы:
- согласно прототипу
R1=R2=1010 Ом; α1=5·10-41/°С;

- согласно предлагаемому методу
R1=R2=1011,5 Ом; α1=5·10-41/°С;

Для оценки влияния метода компенсации и исключения допущений, принятых при выводе аналитических выражений, приведенных в настоящем описании, расчет аддитивной температурной чувствительности проведем через начальные значения выходных сигналов мостовой схемы через выражение (2) с учетом температурного изменения плеч мостовой схемы
- согласно прототипу

- согласно предлагаемому методу

Для определения аддитивной температурной чувствительности необходимо рассчитать номинальное значение выходного сигнала при воздействии на датчик номинального измеряемого параметра согласно выражению (4)
Uн=10·0,25·6·10-3=0,015 В.
Аддитивная температурная чувствительность может быть определена по формуле
- для прототипа

- для предлагаемого метода

Анализ полученных результатов позволяет сделать вывод о том, что метод компенсации аддитивной температурной погрешности, изложенный в прототипе, хотя и позволяет значительно уменьшить эту погрешность (Sot уменьшилась с 66,7·10-4 1/°С до 8,27·10-4 1/°С), однако для обеспечения допустимого значения аддитивной температурной чувствительности потребуется повторить испытания еще 1-2 раза, то есть для достижения требуемого эффекта необходимо использовать метод поэтапного приближения. В реальных условиях некомпенсация достигает еще большего значения из-за наложения еще двух недостатков, которые не учитывались при расчетах.
Предлагаемый метод компенсации с достаточным запасом обеспечивает получение требуемого значения допустимой аддитивной температурной погрешности.
Изобретение относится к измерительной технике, в частности к настройке тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности. Способ заключается в установке в определенное плечо термозависимого компенсационного резистора последовательно рабочему тензорезистору и расчете номинала термозависимого компенсационного резистора с последующей балансировкой начального уровня выходного сигнала. При этом производят предварительную балансировку мостовой схемы с точностью в пределах ±0,5% номинального выходного сигнала датчика, определяют температурные коэффициенты сопротивления (ТКС) всех плеч мостовой схемы с учетом введения балансировочного резистора с учетом предварительной балансировки и определяют начальный уровень выходного сигнала датчика при нормальной температуре и температуре эксплуатации. По знаку изменения начального уровня выходного сигнала некомпенсированного, но сбалансированного датчика производят выбор плеча, в которое подключают термозависимый компенсационный резистор. Причем при положительном уходе начального уровня выходного сигнала, при изменении температуры в положительную сторону указанный резистор подключают в одно из плеч с тензорезисторами, воспринимающими деформацию сжатия, а при отрицательном - в одно из плеч с тензорезисторами, воспринимающими деформацию растяжения. Рассчитывают величину термозависимого компенсационного резистора и после его установки расчетной величины в определенное плечо мостовой схемы производят балансировку мостовой схемы без изменения ТКС балансируемого плеча. Технический результат - повышение технологичности и точности в процессе настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности. 1 табл.
Способ настройки тензорезисторных датчиков с мостовой измерительной цепью по аддитивной температурной погрешности, заключающийся в установке в определенное плечо термозависимого компенсационного резистора последовательно рабочему тензорезистору, расчетом номинала термозависимого компенсационного резистора с последующей балансировкой начального уровня выходного сигнала, отличающийся тем, что производят предварительную балансировку мостовой схемы с точностью в пределах ±0,5% номинального выходного сигнала датчика, определяют температурные коэффициенты сопротивления (ТКС) всех плеч мостовой схемы с учетом введения балансировочного резистора при предварительной балансировке и определяют начальный уровень выходного сигнала датчика при нормальной температуре и температуре эксплуатации, по знаку изменения начального уровня выходного сигнала некомпенсированного, но сбалансированного датчика, производят выбор плеча, в которое подключают термозависимый компенсационный резистор, при этом, при положительном уходе начального уровня выходного сигнала, при изменении температуры в положительную сторону, термозависимый компенсационный резистор подключают в одно из плеч, с тензорезисторами воспринимающими деформацию сжатия, а при отрицательном - в одно из плеч, с тензорезисторами воспринимающими деформацию растяжения, величину термозависимого компенсационного резистора рассчитывают по формулам
при подключении термозависимого компенсационного резистора в плечи, воспринимающие деформацию растяжения
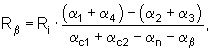
при подключении термозависимого компенсационного резистора в плечи, воспринимающие деформацию сжатия
где Rβ - номинал сопротивления термозависимого компенсационного резистора;
Ri - номинал сопротивления тензорезистора плеча, к которому подключается термозависимый компенсационный резистор;
αc1, αс2, αn - температурные коэффициенты сопротивления тензорезисторов смежных и противолежащего плеч схемы относительно плеча, к которому подключают термозависимый компенсационный резистор;
α1, α2, α3, α4 - температурные коэффициенты сопротивления тех же тензорезисторов, привязанных к присвоенному номеру плеча мостовой схемы (R1 и R4 - тензорезисторы, воспринимающие деформацию растяжения, R2 и R3 - тензорезисторы, воспринимающие деформацию сжатия);
αβ - температурный коэффициент сопротивления термозависимого компенсационного резистора Rβ,
после установки термозависимого компенсационного резистора расчетной величины в определенное плечо мостовой схемы производят балансировку мостовой схемы без изменения ТКС балансируемого плеча.
| Проектирование датчиков для измерения механических величин | |||
| Е.П.ОСАДЧИЙ | |||
| - М.: Машиностроение, 1979 | |||
| СПОСОБ ТЕМПЕРАТУРНОЙ КОМПЕНСАЦИИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ | 1984 |
|
RU2027142C1 |
| СПОСОБ НАСТРОЙКИ ИНТЕГРАЛЬНОГО ТЕНЗОМОСТА С ПИТАНИЕМ ОТ ИСТОЧНИКА ТОКА | 1994 |
|
RU2079102C1 |
| 0 |
|
SU162782A1 | |
| Способ настройки интегральных тензометрических мостов | 1987 |
|
SU1448288A1 |
| Интегральный тензометрический мост и способ его настройки | 1986 |
|
SU1368621A1 |
| US 4172389 A, 30.10.1979 | |||
| US 3447362 А, 03.06.1969. | |||

