ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
В соответствии со статьей 35 §119(а) свода законов США, приоритет данной заявки заявляется по заявке на патент Кореи № 2005-18488, поданной 7 марта 2005 года и полностью включенной в настоящую заявку посредством ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область изобретения
Данное изобретение в целом относится к сфере автоматических устройств, предназначенных для уборки, а в некоторых примерных вариантах выполнения к детектору тела для подобных устройств.
Описание уровня техники
Среди обычных дел по домашнему хозяйству уборку, как правило, осуществляют пылесосом. Однако даже уборка пылесосом весьма трудоемка, поскольку пользователю необходимо переносить пылесос к каждому удаленному месту и углу.
Соответственно, было выполнено исследование в области роботов-пылесосов, способных автоматически определять и осуществлять необходимые операции при минимальном внешнем управлении. Как правило, робот-пылесос автоматически совершает перемещение по заданной площади для уборки, при этом он втягивает пыль с очищаемой поверхности, например пола, без непрерывного управления со стороны пользователя, убирая тем самым заданную площадь.
Однако человек или домашнее животное (упоминаемые далее как «тело») при возможном столкновении с роботом-пылесосом по мере его автоматического перемещения по очищаемой площади может получить травму. Для предотвращения подобных столкновений были предприняты попытки в создании датчиков обнаружения препятствий в роботах-пылесосах.
Тем не менее, датчики обнаружения препятствий обычно распознают препятствия, которые находятся непосредственно перед ними, то есть на пути перемещения робота-пылесоса. Следовательно, несмотря на то, что к нижней части робота-пылесоса, которая очищает поверхность, может приблизиться или войти с ней в соприкосновение часть тела, например конечность, датчики обнаружения препятствий часто не распознают тело. Поскольку робот-пылесос содержит опасные для здоровья части, например приводной электродвигатель, предназначенный для работы робота-пылесоса, а также колеса в его нижней части, то телу может быть нанесена травма при соприкосновении с этими или другими частями устройства. Соответственно, существует необходимость в защитном устройстве, предотвращающем приближение или соприкосновение тела с опасными участками робота-пылесоса. Особая необходимость в подобном защитном устройстве существует в домах, где есть дети и младенцы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следует понимать, что как и сущность изобретения, так и подробное его описание, приведенные ниже, являются иллюстративными и пояснительными, при этом они предназначены для дополнительного пояснения заявленного изобретения. Ни сущность, ни последующее описание не предусматриваются для определения или ограничения объема правовой охраны данного изобретения в части, касающейся особых деталей, упомянутых в сущности или описании.
В некоторых вариантах выполнения благодаря настоящему изобретению устраняется одна или более одной из вышеуказанных проблем и/или недостатков и предлагается одно или более одного преимущества, описанного ниже.
В иллюстративном варианте выполнения робот-пылесос содержит защитное устройство, которое временно прекращает движение опасных частей при приближении или соприкосновении с ними тела, повышая тем самым безопасность робота-пылесоса.
В иллюстративном варианте выполнения робот-пылесос содержит привод, предназначенный для поддержки корпуса пылесоса с возможностью его перемещения и создающий тяговое усилие для приведения в действие корпуса пылесоса; всасывающую часть, установленную в корпусе пылесоса и предназначенную для втягивания пыли с очищаемой поверхности; детектор тела, установленный на корпусе пылесоса и предназначенный для распознавания приближения или соприкосновения, по меньшей мере, части тела человека или домашнего животного; и управляющую часть, предназначенную для включения и выключения привода в соответствии с сигналом, зарегистрированным детектором тела.
В соответствии с некоторыми вариантами выполнения настоящего изобретения управляющая часть включает и выключает всасывающую часть в соответствии с сигналом, зарегистрированным детектором тела. Например, детектор тела может содержать емкостной тактильный детектор. В этом варианте выполнения емкостной тактильный детектор может содержать чувствительную панель, предназначенную для распознавания приближения тела или соприкосновения с телом, а также процессор сигналов, предназначенный для обработки сигнала, зарегистрированного чувствительной панелью, и передачи данного сигнала к управляющей части. Чувствительная панель может быть расположена на опасном участке, который может нанести травму телу человека путем соприкосновения с ним. Например, опасный участок может содержать привод.
В другом более конкретном иллюстративном варианте выполнения корпус пылесоса содержит нижнюю пластину, обращенную к очищаемой поверхности, крышку, закрывающую нижнюю пластину, и колеса, установленные на нижней пластине и соединенные с приводом для передачи мощности, при этом указанный привод содержит приводной электродвигатель, установленный на нижней пластине, а чувствительная панель расположена на внутренней стороне нижней пластины, обращенной к крышке, и находится смежно с колесами и приводным электродвигателем на внутренней стороне. Чувствительная панель содержит электропроводящий материал.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые включены в данный документ в виде части подробного описания, иллюстрируют данное изобретение и, вместе с описанием, дополнительно служат для пояснения его принципов, а также дают возможность специалистам в данной области техники создавать и использовать данное изобретение.
Фиг.1 изображает покомпонентный вид в аксонометрии робота-пылесоса в соответствии с иллюстративным вариантом выполнения;
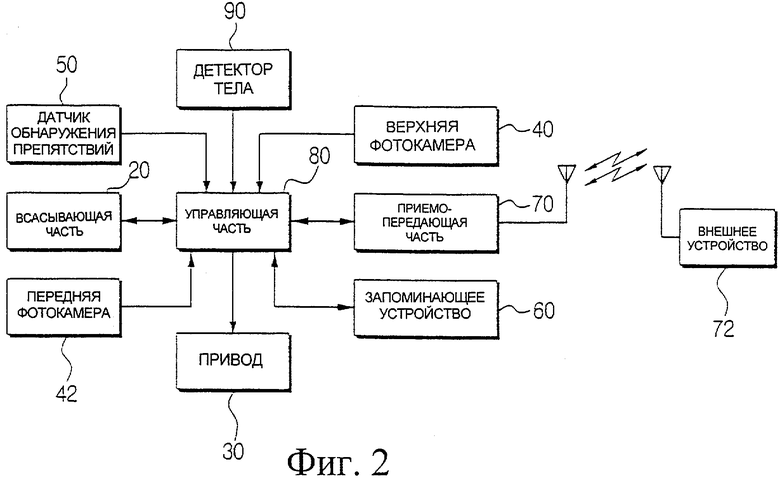
фиг.2 изображает блок-схему, поясняющую иллюстративный вариант выполнения системы управления, которая может быть использована в роботе-пылесосе, приведенном на фиг.1;
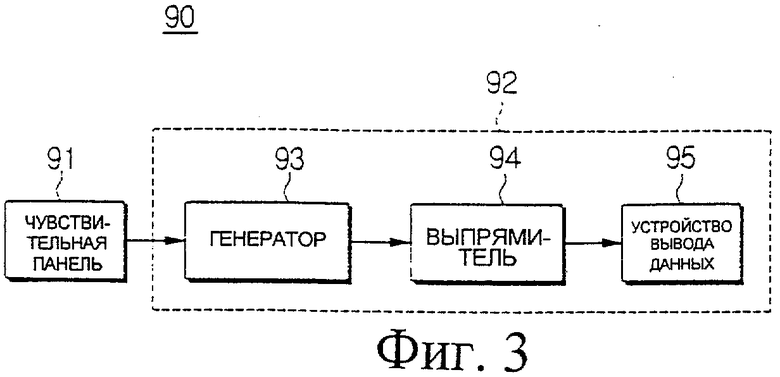
фиг.3 изображает блок-схему, поясняющую иллюстративный вариант выполнения детектора тела, который может быть использован в варианте выполнения, приведенном на фиг.2;
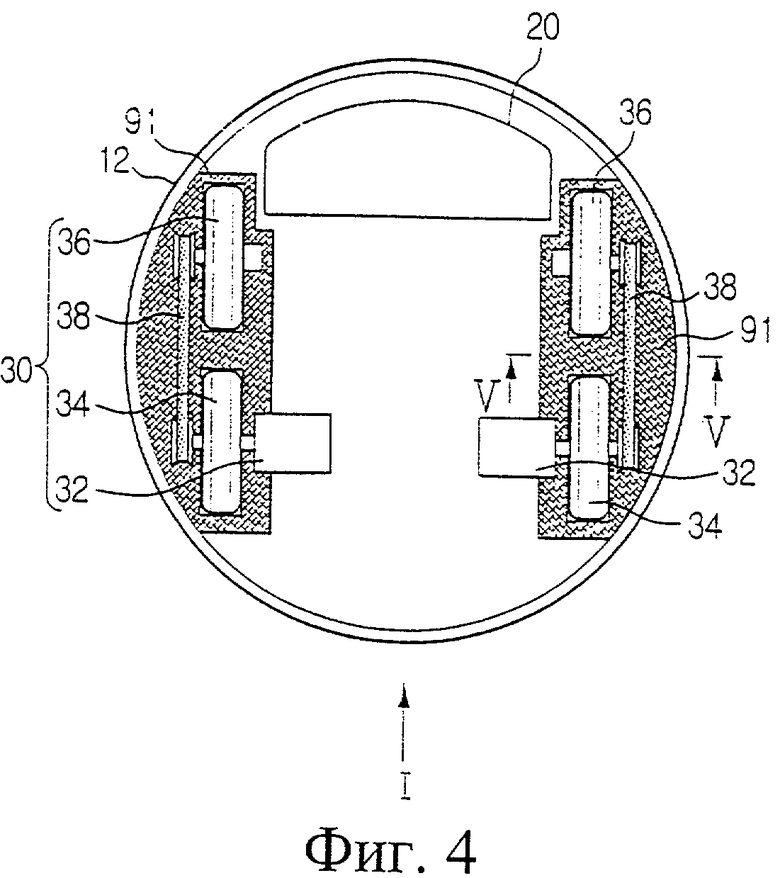
фиг.4 изображает вид сверху, схематически показывающий основные элементы одного варианта выполнения робота-пылесоса, приведенного на фиг.1; и
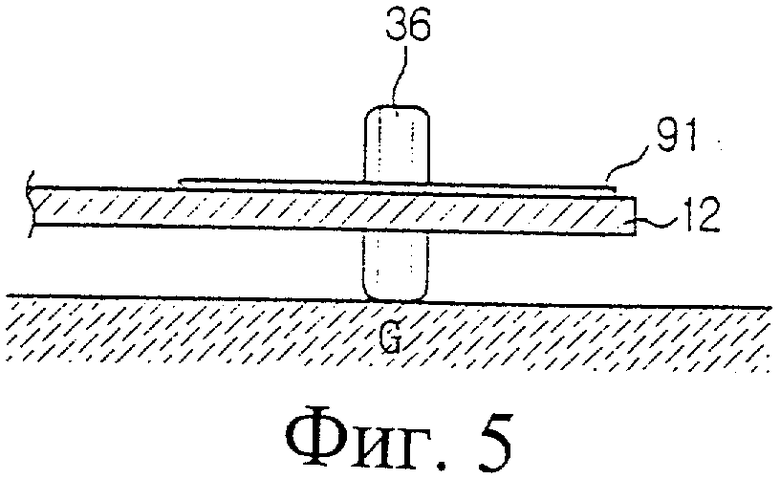
фиг.5 изображает разрез части, показанной на фиг.4, по линии V-V.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Описание робота-пылесоса будет объяснено на основе нескольких иллюстративных вариантов выполнения. Этим описанием раскрывается один или несколько вариантов выполнения, содержащие признаки настоящего изобретения. Приведенный вариант(ы) выполнения, а также ссылки в тексте на "один вариант выполнения", "вариант выполнения", "иллюстративный вариант выполнения" и т.д. означают, что данный описанный вариант(ы) может (могут) содержать конкретный признак, конструкцию или характеристику, но они необязательно должны быть включены в каждый вариант выполнения изобретения. Более того, такие фразы не обязательно относятся к одному и тому же варианту выполнения. Далее, если приводится описание конкретного признака, конструкции или характеристики в отношении варианта выполнения, специалисты в данной области техники могут использовать данный признак, конструкцию или характеристику в отношении других вариантов выполнения, не зависимо от того, подробно они описаны или нет.
В нижеприведенном описании одинаковые номера позиций относятся к одинаковым элементам, даже на разных чертежах. Определенные в описании варианты выполнения, а также их конструктивное исполнение и элементы являются лишь средствами лучшего понимания изобретения. Таким образом, очевидно, что настоящее изобретение может быть выполнено различными способами и без описанных здесь признаков. Помимо того, хорошо известные функции или конструктивные исполнения не описаны подробно, поскольку они мешают пониманию описания введением несущественных деталей.
Обратимся к фиг.1 и 2, на которых показано, что робот-пылесос в соответствии с одним примерным вариантом выполнения содержит корпус 10, всасывающую часть 20, привод 30, верхнюю фотокамеру 40, переднюю фотокамеру 42, датчик 50 обнаружения препятствий, запоминающее устройство 60, приемопередающую часть 70, управляющую часть 80 и детектор 90 тела. Ссылочной позицией "l" обозначена передняя часть робота-пылесоса или направление его перемещения.
В этом примере корпус 10 пылесоса содержит нижнюю пластину 12, обращенную к очищаемой поверхности G (фиг.5), и крышку 14, закрывающую пластину 12.
В одном варианте выполнения всасывающая часть 20, выполненная в корпусе 10, предназначена для втягивания запыленного воздуха. Всасывающая часть 20, являющаяся главной частью при процессе уборки роботом-пылесосом, может относиться к различным общеизвестным типам всасывающих частей роботов-пылесосов. Иллюстративная всасывающая часть 20 может содержать всасывающий двигатель (не показан); всасывающее отверстие (не показано), выполненное в корпусе 10 пылесоса и предназначенное для втягивания пыли с пола за счет всасывающего усилия, создаваемого всасывающим двигателем; щетку (не показана), выступающую из всасывающего отверстия, предназначенную для взбивания и рассеяния пыли; и пылесборник (не показан), предназначенный для осаждения в нем втянутой пыли.
В одном варианте выполнения привод 30 (фиг.4) содержит приводной электродвигатель 32, ведущее колесо 34 и ведомое колесо 36. Пара приводных электродвигателей 32, установленных на противоположных сторонах передней части нижней пластины 12, обеспечивается питанием от узла энергоснабжения (не показан). Пара ведущих колес 34, установленных на нижней пластине 12, соединена с электродвигателем 32 силовым способом. Пара ведомых колес 36, установленных на противоположных сторонах тыльной части нижней пластины 12, соединена с ведущими колесами 34 через элемент 38 передачи мощности. Несмотря на то, что в показанном варианте выполнения в качестве элемента 38 передачи мощности использован шкив ременной передачи, элемент 38 передачи мощности может быть выполнен посредством различных средств передачи, например зубчатого ремня. Также, в противоположность показанному варианту выполнения, в котором используется пара приводных электродвигателей, возможно использование любого количества электродвигателей, например одного приводного электродвигателя. Из вышеизложенного следует, что для привода 30 возможно использование ряда конструктивных решений, при условии достижения устойчивого перемещения робота-пылесоса. В соответствии с управляющим сигналом от управляющей части 80 привод 30 независимо вращает приводные электродвигатели 32 по часовой и против часовой стрелки. Направление перемещения робота-пылесоса определяется управляющей скоростью вращения (измеренной в оборотах в минуту или об/мин) соответствующих электродвигателей 32.
В одном варианте выполнения верхняя фотокамера 40, установленная на нижней пластине 12, фотографирует изображение потолка и посылает сфотографированное изображение в управляющую часть 80. Верхняя фотокамера 40 предпочтительно оборудована объективом типа «рыбий глаз» (не показан). Конструкция объектива типа «рыбий глаз» раскрыта (для примера) в опубликованных патентах Кореи №№1996-7005245, 1997-48669 и 1994-22112. Подобные объективы имеются в продаже, поэтому их подробное описание не приводится.
В одном варианте выполнения передняя фотокамера 42, установленная на нижней пластине 12, фотографирует фронтальное изображение и посылает сфотографированное изображение в управляющую часть 80.
В одном варианте выполнения датчики 50 обнаружения препятствий расположены по периферии края нижней пластины 12 на определенном расстоянии друг от друга и предназначены для передачи сигнала в наружное пространство и приема отраженного сигнала. Датчик 50 может быть выполнен с использованием различных технологий, например, в виде оптического датчика или ультразвукового датчика. Кроме того, возможно использование датчика 50 для определения расстояния от этого датчика до препятствия или стены.
В еще одном варианте выполнения запоминающее устройство 60 сохраняет изображение потолка, сфотографированное верхней фотокамерой 40, и содействует управляющей части 80 в вычислении информации о местоположении и перемещении, основанной на сохраненном изображении. Также запоминающее устройство 60 может хранить опорное значение для сравнения со значением сигнала, поступившего от детектора 90 тела, а также программу для сравнения значения сигнала с опорным значением.
В одном иллюстративном варианте выполнения приемопередающая часть 70 посылает данные для передачи к внешнему устройству 72 через приемопередатчик (не показан), установленный в управляющей части 80, а также передает к управляющей части 80 сигнал, принятый от внешнего устройства 72 через приемопередатчик (не показан). Внешнее устройство 72 может содержать, например, коммутатор беспроводной связи (не показан) и дистанционный контроллер (не показан), выполненные с возможностью ввода и вывода данных.
В одном варианте выполнения управляющая часть 80 обрабатывает сигнал, принятый от приемопередающей части 70, и управляет соответствующими частями в соответствии с сигналом. В вариантах выполнения, в которых корпус 10 пылесоса дополнительно содержит устройство ввода с клавиатуры (не показано), содержащее клавиши, предназначенные для установки функций робота-пылесоса, управляющая часть 80 обрабатывает сигнал, введенный с устройства ввода с клавиатуры.
Управляющая часть 80 определяет и соотносит местоположение опознавательной метки, прикрепленной к потолку очищаемой области, с изображением потолка, сфотографированного верхней фотокамерой 40, и распознает местоположение робота-пылесоса, основываясь на информации о местоположении, тем самым, управляя соответствующими частями для осуществления их собственных функций с использованием информации о местоположении.
Дополнительно, управляющая часть 80 управляет режимами включения/ выключения привода 30 и всасывающей части 20 в соответствии с сигналом, поступившим от детектора 90 тела. В других обстоятельствах только одна из указанных частей - привод 30 или всасывающая часть 20, может управляться от сигнала, поступившего от детектора 90 тела.
Обратимся к фиг.3-5, на которых показано, что детектор 90 тела может содержать емкостной тактильный детектор 90, предназначенный для распознавания приближения тела или соприкосновения с телом в соответствии с изменением диэлектрической проницаемости. Пример подходящего емкостного тактильного детектора 90 раскрыт в Корейской публикации полезной модели №362801. Емкостной тактильный детектор 90 содержит чувствительную панель 91, предназначенную для распознавания приближения тела или соприкосновения с телом, и процессор 92 сигнала, предназначенный для обработки сигнала, зарегистрированного чувствительной панелью 91, и передачи сигнала к управляющей части 80.
В некоторых иллюстративных вариантах выполнения чувствительная панель 91 расположена на внутренней стороне нижней пластины 12, обращенной к крышке 14, рядом с приводом 30. Чувствительная панель 91 может быть выполнена из электропроводящего материала, например меди или алюминия. Благодаря расположению чувствительной панели 91 около привода 30, возможно распознавание приближения тела или соприкосновения тела с приводом 30. Также, благодаря установке на внутренней стороне нижней пластины 12, обращенной к крышке 14, то есть внутри корпуса 10 пылесоса, чувствительная панель 91 не выступает наружу. Тем самым, ошибки в сигнале, возникающие вследствие влажности снаружи пылесоса, могут быть предотвращены. Несмотря на то, что в данном варианте выполнения привод 30 рассматривается как опасная часть, которая может нанести повреждение телу, в случае, когда робот-пылесос дополнительно содержит электрические или механические опасные части, помимо привода 30, чувствительная панель 91 может быть расположена около этих других опасных частей.
В варианте выполнения процессор 92 содержит генератор 93, возбуждающий сигнал с формой, отличной от формы сигнала электрического тока, зарегистрированного чувствительной панелью 91, выпрямитель 94, преобразующий сигнал, возбуждаемый генератором 93, в постоянный ток; и устройство 95 вывода данных для вывода постоянного тока, преобразованного из сигнала, к управляющей части 80. Поскольку емкостной тактильный детектор 90 является общеизвестным в данной области техники, подробное описание его работы и его схема опускаются.
Ниже со ссылкой на фиг.1-5 приведено описание работы устройства с выбранными иллюстративными свойствами.
В этом примере, относящемся к работе, управляющая часть 80 осуществляет управление приводом 30 с целью его перемещения по очищаемой площади в соответствии с заданной схемой перемещения, а также сохраняет в запоминающем устройстве 60 картографированное изображение потолка, основываясь на изображении, сфотографированном верхней фотокамерой 40. Как вариант, при приеме радиосигнала от устройства ввода (с клавиатуры) или извне управляющая часть 80 может составить картографированное изображение перед уборкой.
Например, после завершения составления картографированного изображения во время проведения работы управляющая часть 80 распознает местоположение робота-пылесоса, используя это картографированное изображение. При поступлении запроса о проведении работы с устройства ввода (с клавиатуры) или извне посредством радиосигнала управляющая часть 80 распознает текущее местоположение робота-пылесоса, сравнивая картографированное изображение с текущими изображениями, поступившими из верхней фотокамеры 40 и передней фотокамеры 42, и осуществляет управление приводом 30 для перемещения последнего от распознанного местоположения вдоль траектории к заданному конечному местоположению.
В качестве примера можно рассмотреть ситуацию, когда робот-пылесос перемещается по траектории к конечному местоположению, управляющая часть 80 рассчитывает ошибку в перемещении, используя расстояние перемещения, определенное кодирующим устройством, и текущее местоположение, которое определяется путем сравнения сфотографированного изображения с сохраненным картографированным. После этого управляющая часть 80 осуществляет управление приводом 30 с отслеживанием данной траектории к конечному местоположению с учетом рассчитанной ошибки.
В этом примере всасывающий двигатель (не показан) приводится в действие за счет энергии, поступающей от подающей питание части (не показана), находящейся внутри корпуса 10 пылесоса. Соответственно, за счет создаваемого всасывающего усилия робот-пылесос втягивает пыль с очищаемой поверхности G (фиг.5), осуществляя, таким образом, уборку. Поскольку процесс уборки легко понять, подробное описание этого процесса опускается.
Когда датчик 50 обнаружения препятствий во время уборки обнаруживает перед собой препятствие, управляющая часть 80 приостанавливает работу привода 30 или осуществляет управление роботом-пылесосом так, что тот изменяет свой курс и обходит препятствие. Однако датчик 50 не распознает приближение такого препятствия как тело к нижней части нижней пластины 12 робота-пылесоса или соприкосновение тела с ней. Поэтому чувствительная панель 91 установлена на нижней поверхности нижней пластины 12, главным образом у опасных участков, вблизи привода 30, а также у участка, предусмотренного для захвата пользователем робота-пылесоса для его переноса.
По мере приближения или соприкосновения части тела с нижней пластиной 12, особенно с приводом 30 нижней пластины 12, чувствительная панель 91 распознает это приближение. Сигнал передается к управляющей части 80, проходит через генератор 93, выпрямитель 94 и устройство 95 вывода данных. Таким образом, управляющая часть 80 осуществляет выключение привода 30 и всасывающей части 20 для предотвращения нанесения травм телу приводом 30. Также, благодаря выключению как всасывающей части 20, так и привода 30, можно предотвратить потребление энергии вследствие напрасной работы.
Более того, в этом примере, поскольку чувствительная панель 91 детектора 90 тела установлена внутри корпуса 10 пылесоса, возможно предотвращение ошибок сигнала, возникающих вследствие влажности, соответственно улучшаются эксплуатационные характеристики детектора 90 тела по определению приближения тела или соприкосновения с телом.
Несмотря на то, что изобретение показано и описано со ссылкой на определенные варианты выполнения, специалистам в данной области техники следует понимать, что возможно внесение различных изменений во внешний вид и детали без отхода от сущности и объема правовой охраны изобретения, как это определено в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
| ВСАСЫВАЮЩАЯ ЩЕТКА, ИСПОЛЬЗУЕМАЯ В ПЫЛЕСОСЕ, И СПОСОБ РЕГУЛИРОВАНИЯ ЕЕ ВЫСОТЫ | 2008 |
|
RU2471403C2 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ УБОРКИ | 2005 |
|
RU2326577C2 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ЭТИМ РОБОТОМ-ПЫЛЕСОСОМ | 2006 |
|
RU2314557C2 |
| РОБОТ-ПЫЛЕСОС, СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2003 |
|
RU2242160C1 |
| ПОДВИЖНЫЙ РОБОТ, СОДЕРЖАЩИЙ УВЛАЖНИТЕЛЬ ВОЗДУХА | 2005 |
|
RU2322644C2 |
| СПОСОБ ЗАРЯДКИ РОБОТА-ПЫЛЕСОСА | 2007 |
|
RU2350252C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ ОЧИСТКИ ВОЗДУХА И ЕГО СИСТЕМА | 2004 |
|
RU2267975C1 |
| ВСАСЫВАЮЩАЯ ЩЕТКА ДЛЯ ПЫЛЕСОСА | 2008 |
|
RU2370199C1 |
| РОБОТ-ПЫЛЕСОС | 2003 |
|
RU2264159C2 |
Подвижный робот, содержащий детектор тела, содержит привод, предназначенный для поддержки корпуса пылесоса с возможностью его перемещения и создающий тяговое усилие для приведения в действие корпуса пылесоса, всасывающую часть, установленную в корпусе пылесоса и предназначенную для втягивания пыли с очищаемой поверхности, детектор тела, установленный на корпусе пылесоса и предназначенный для распознавания любого приближения, по меньшей мере, части тела человека или домашнего животного или соприкосновения с ней, и управляющую часть, предназначенную для включения и выключения привода в соответствии с сигналом, зарегистрированным детектором тела. Обеспечивается повышение безопасности устройства. 2 н. и 7 з.п. ф-лы, 5 ил.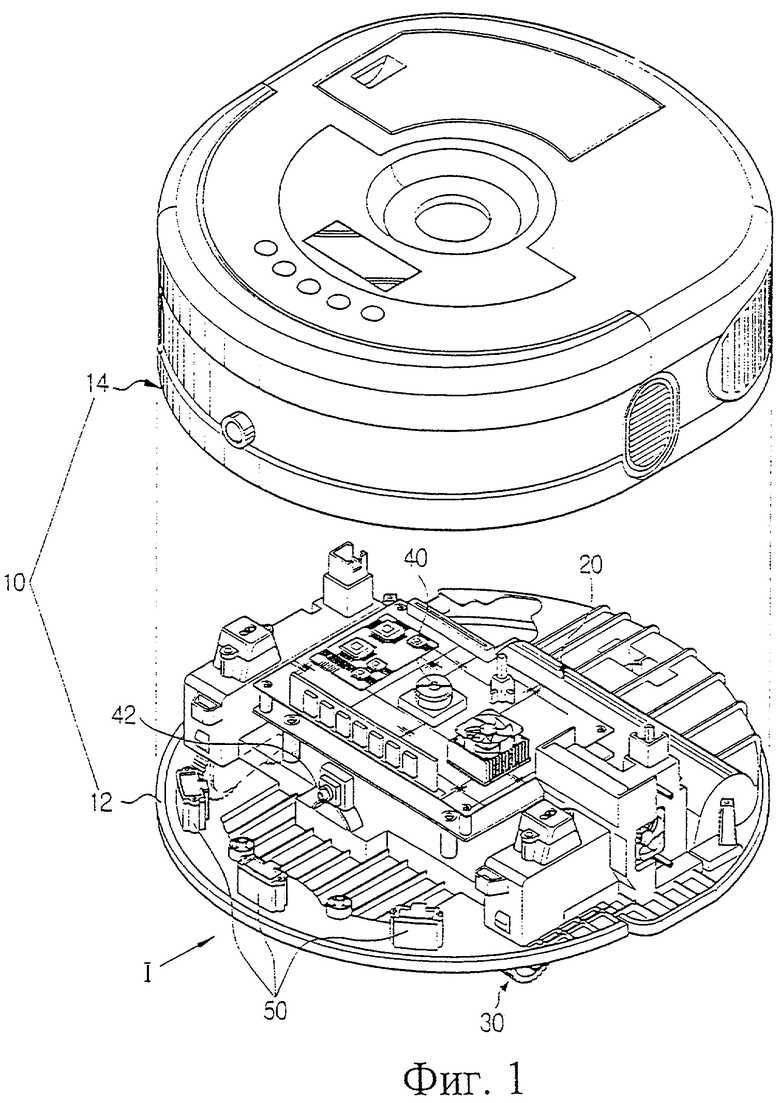
| Устройство измерения веса сыпучих материалов | 1986 |
|
SU1401289A1 |
| KR 20040039094, 10.05.2004 | |||
| KR 20040081629, 22.09.2004. | |||

