Предлагаемое изобретение относится к стартовым сооружениям ракет-носителей космического назначения.
Известна система воздушного пуска крылатой ракеты, находящейся в горизонтальном положении (см. заявку Великобритании №229155, B 64 D 5/00, В 1/100, G 9/00), включающая платформу, на которой установлена ракета, и дирижабли, каждый из которых оснащен воздушными винтами с горизонтальной тягой. Дирижабли прикреплены к противоположным краям платформы и являются устройствами предварительного подъема ракеты в тропосфере.
Недостатком такой системы является невозможность поднятия тяжелой ракеты из-за чрезмерного увеличения размеров дирижаблей и связанной с этим большой площадью их поперечного сечения, способствующей сносу ветром системы. Кроме того, продукты сгорания топлива двигателей ракеты могут разрушить оболочку дирижабля и привести к аварии.
Для устранения этих недостатков известна система Rotary Rocket (США, Калифорния, см. кн. А.И.Киселев и др. Космонавтика на рубеже тысячелетий. Итоги и перспективы. М., 2001, 672 с.), включающая устройство предварительного подъема ракеты в тропосфере, выполненное в виде конусообразного устройства, установленного на стартовой площадке острым концом вверх. Устройство имеет вертикальное осевое отверстие, оснащено жидкостным ракетным двигателем с вертикальной тягой с кольцевым соплом, а также вертолетным винтом, на концах лопастей которого установлены жидкостные реактивные двигателя с горизонтальной тягой и который смонтирован в верхней части конусообразного устройства. Космическая ракета может помещаться в указанном вертикальном осевом отверстии.
По действием ракетного двигателя с вертикальной тягой и вращающегося вертолетного винта эта система воздушного пуска космических ракет поднимается на некоторую высоту в тропосфере. Затем включаются двигатели космической ракеты, которая, получив начальную скорость, стартует вертикально вверх, а конусообразное устройство предварительного подъема опускается вниз, поддерживаемое вертолетным винтом, вращающимся в режиме авторотации.
Недостатком этой системы воздушного пуска космических ракет является то, что ею нельзя поднимать космические ракеты с параллельно (пакетно) расположенными ступенями. Кроме того, основная тяга создается жидкостным ракетным двигателем с вертикальной тягой, стартующим с поверхности Земли. А недостатки наземного старта тяжелых ракет известны: наличие чрезмерного звукового давления (до 140 дБ, когда звук при 100 дБ считается уже смертельным), возможность взрыва ракеты с разрушением стартовых сооружений и жертвами среди обслуживающего персонала, загрязнение окружающей местности продуктами сгорания топлива и другие.
Указанные выше недостатки устраняются в предлагаемом изобретении тем, что устройство предварительного подъема космической ракеты в тропосфере выполнено в виде жесткой пространственной решетки, цельной или состоящей из нескольких, близких друг к другу по массе секций с возможностью их горизонтального и одновременного смещения относительно вертикальной оси симметрии решетки, на верхних узловых точкам которой смонтированы многолопастные вертолетные винты с электромеханическим приводом и регулируемым шагом винта, имеющие на общей оси вращения немноголопастные вертолетные винты с реактивным приводом, по периметру установлены воздушные винты с возможностью перемены направления вектора тяги также с электромеханическим приводом, причем с краю от оси симметрии решетки закреплены высоковольтные провода токоподвода, на противоположном краю смонтирована шумозащищенная кабина управления, а к нижним узловым точкам решетки посредством электрических изоляторов закреплены стропы, нижние концы которых привязаны к приспособлению для удержания космической ракеты.
Электромеханический привод многолопастных вертолетных винтов включает вертикально установленные высоковольтные электродвигатели с общим для каждого винта редуктором, а реактивный привод немноголопастных вертолетных винтов - прямоточные воздушно-реактивные двигатели, причем направления вращения соседних многолопастных вертолетных винтов могут быть противоположны.
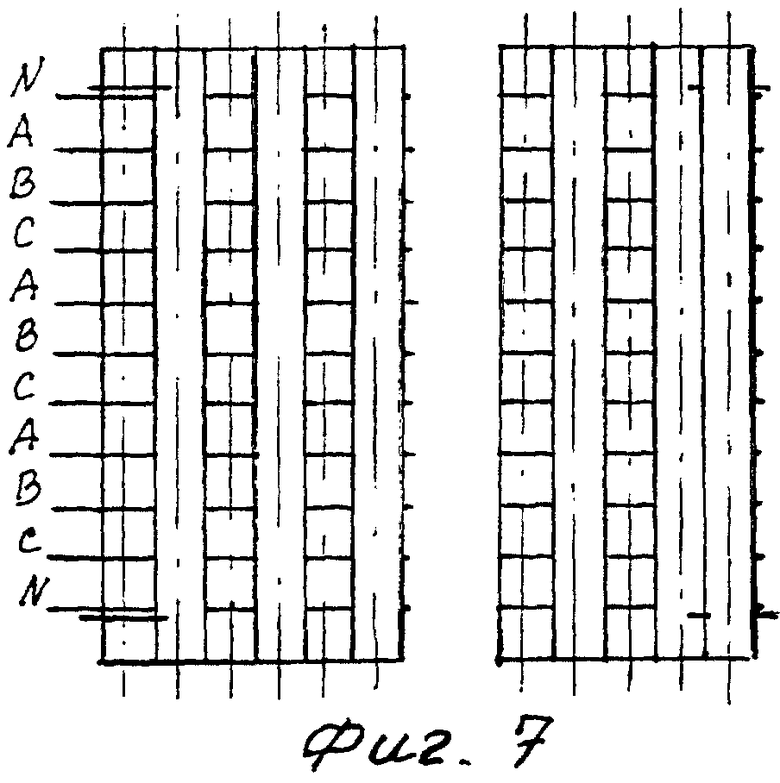
Токоподвод выполнен из параллельно и в одной плоскости расположенных проводов одинакового диаметра так, что они образуют ленту, по краям которой расположены провода с нулевой фазой, причем все провода разделены друг от друга изолирующими стержнями, например отрезками полимерной трубы одинаковой длины, расположенными горизонтально, закрепленными концами к соседним проводам, лента уложена в полиспаст с параллельно расположенными барабанами, поверхности которых покрыты изоляционным материалом.
Приспособление для удержания космической ракеты выполнено из стольких же секций, что и пространственная решетка, с возможностью их горизонтального и одновременного смещения, причем каждая секция соединена стропами с соответствующей секцией решетки и может быть закреплена, например, также стропами к выступам, выполненным, например, в виде крюков, установленным на корпусе космической ракеты с возможностью отсоединения в начальный момент воздушного пуска.
Таким образом, в предлагаемом изобретении:
1. Выполнение устройства предварительного подъема в виде пространственной решетки снижает площадь поперечного сечения системы и уменьшает возможность сноса при более высоких скоростях ветра.
2. Электромеханический привод вертолетных винтов обеспечивает большую надежность (за счет упрощения управления и уменьшения количества деталей) по сравнению с известными и продолжительность работы в режиме висения.
3. Горизонтальное смещение секций пространственной решетки относительно ее вертикальной оси симметрии обеспечивает беспрепятственный пуск космической ракеты с любым расположением ступеней.
4. Большое количество вертолетных винтов обеспечивает подъем в тропосфере сверхтяжелых (массой более 2 тыс.т) космических ракет.
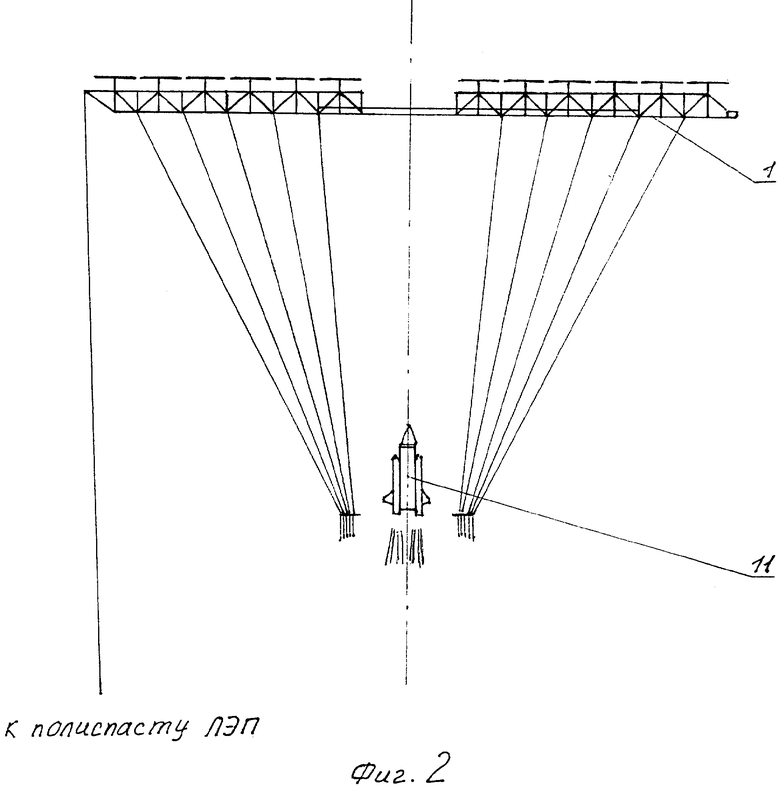
На фиг.1 изображена система воздушного пуска космических ракет в режиме висения в воздухе; на фиг.2 - то же в момент воздушного пуска космической ракеты; на фиг.3 - то же с полностью смещенными секциями (вид сверху); на фиг.4 показана часть пространственной решетки с вращающимися в разные стороны вертолетными винтами (вид сверху); на фиг.5 - то же (вид сбоку); на фиг.6 показан полиспаст токоподвода; на фиг.7 - то же (вид сверху); на фиг.8 показан кусок ленты проводов высокого напряжения; вытянутый из полиспаста; на фиг.9 показано приспособление для удержания космической ракеты.
Система воздушного пуска космических ракет работает следующим образом.
Во внерабочем положении пространственная решетка 1 лежит на опорах, размещенных на поверхности Земли на расстоянии примерно 50 м от сооружения, в котором размещен полиспаст токоподвода (фиг.6). (Высота сооружения может достигать 50 м и более, размеры пространственной решетки 1 в плане составляют примерно 350×350 м.) В этом положении неизолированная часть высоковольтных проводов 13 и значительная длина изолированной части находятся в полиспасте токоподвода. При этом синхронизатор 19 занимает самое низкое положение. Полукольца приспособления 10 сомкнуты, стропы 9 лежат на площадке под решеткой 1. В этом положении, когда ток отключен, производится заправка топливных баков 7 (фиг.5) и замена отработавших при предыдущем пуске твердотопливных ракет приспособления 10. Космическая ракета 11 удерживается в вертикальном положении наземной кабель-заправочной башней, расположенной примерно в 100 м от пространственной решетки 1.
После завершения обслуживания космической ракеты 11 в ходе предстартовых работ, занятия космонавтами своих мест во многоразовом транспортном корабле, входящем в состав космической ракеты 11, подключают ток к высоковольтным проводам 13. Оператор, находящийся в кабине 22, включает электродвигатели 4 электромеханического привода многолопастных вертолетных винтов 3 и, постепенно увеличивая шаг винтов 3, производит подъем пространственной решетки 1, управляя винтами 3, 12, подводит приспособление 10 к носовой части космической ракеты 11 (фиг.9). Зацепление стропов 23 к крюкам 24 выполняется стропальщиками, находящимися на откидных площадках обслуживания кабель-заправочной башни (не показано). Затем оператор путем дальнейшего увеличения шага винтов 3 натягивает стропы 9, 23. Электрические изоляторы 8 (фиг.5) предотвращают возможную утечку тока на корпус ракеты 11. Проверив надежность крепления стропов 23 к крюкам 21, стропальщики уходят. Оператор включает прямоточные воздушно-реактивные двигатели 6 и переводит систему воздушного пуска космических ракет в режим висения. От ракеты 11 отстыковываются бортовые разъемные соединения кабелей, отходят поворотные консоли с площадками обслуживания и узлами удержания. Увеличивая шаг винтов 3, оператор начинает подъем всей системы. При этом могут работать воздушное винты 12, а высоковольтные провода 13 вытягиваются из полиспаста, барабаны 18 постепенно и синхронно поднимаются вверх, приближаясь к барабанам 16. Перед достижением расчетной высоты пуска ракеты включаются ракетные двигатели ускорителей космической ракеты 11. При достижении ими силы тяги, превышающей силу тяжести космической ракеты 11, натяжение стропов 23 ослабляется. Под действием силы тяжести они отсоединяются от крюков 21 (фиг.9). Затем автоматически срабатывают твердотопливные ракеты приспособления 10 и пироболты, связывающие его полукольца и секции решетки 11. В это же время часть вертолетных винтов 3 обеих секций решетки 1 включаются на смещение по направляющим 2 относительно вертикальной оси симметрии решетки 1 ее секций. Система воздушного пуска космических ракет приходит в положение по фиг.2. К моменту подхода ракеты 11 к основанию решетки 1 (примерно через 5...10 с после пуска) ее секции отходят полностью (фиг.3), исключив возможность касания. Выключаются прямоточные воздушно-реактивные двигатели 6. Уменьшая шаг винтов 3 и управляя им, оператор сближает секции решетки 1 и производит снижение. Под действием сил тяжести барабанов 18 и синхронизатора 19 провода 13 затягиваются в полиспаст (фиг.6). Реборды барабанов 15 и барабан 17 предотвращают сход проводов 13 с полиспаста. Изолирующие стержни 14 предотвращают возникновение короткого замыкания.
В случае аварийного отключения тока автоматически включаются прямоточные воздушно-реактивные двигатели 6 винтов 5.
Достигнув поверхности Земли, решетка 1 опускается на опоры, установленные на посадочной площадке. Ток отключают. С помощью лебедок соединяют пироболтами полукольца приспособления 10 и секции решетки 1 между собой. Система воздушного пуска космических ракет возвращается в исходное положение.
Возможен вариант системы воздушного пуска с использованием дополнительной решетки (рамы) с несущими винтами, связанной с основной отрезком питающего кабель-троса. На фиг.10 показана пространственная решетка 1, к которой подвешена ракета 11, и дополнительная решетка 24 с несущими винтами, к которой подвешен кабель-трос 13. Решетка 24 соединена с решеткой 1 отрезком питающего изолированного кабель-троса 25, длина которого обеспечивает необходимые маневры решетки 1.
Для регулирования безопасного расстояния между решетками 1 и 24 они могут быть снабжены воздушными винтами с реверсивной тягой.
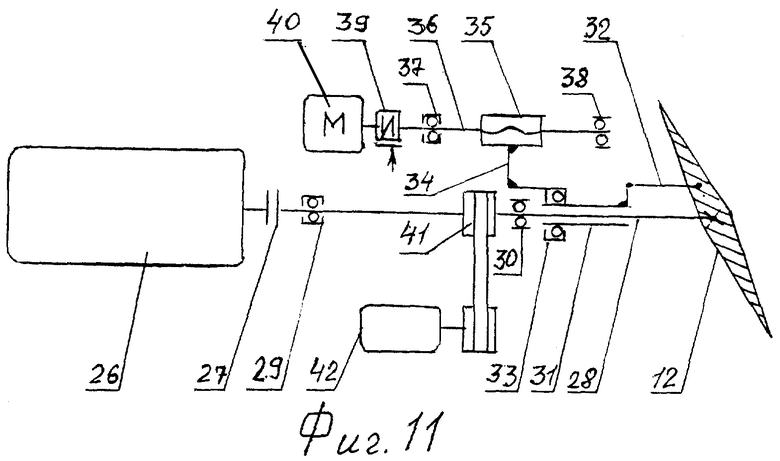
На фиг.11 показано устройство воздушного винта с реверсивной тягой. Высоковольтный электродвигатель 26 через муфту 27 связан со шлицевым валом 29, установленным на радиально-упорном 29 и радиальном 30 подшипниках. На свободном конце вала 28 установлен воздушный винт 12 (показано его поперечное сечение). На шлицевой части вала 28 установлена шлицевая втулка 31, которая шарнирной тягой 32 связана с винтом 12. На втулке 31 установлен радиально-упорный подшипник 33, наружное кольцо которого через тягу 34 связано с гайкой 35 передачи "винт-гайка", установленной на валу-винте 36, сидящей на радиально-упорном 37 и радиальном 38 подшипниках. Вал-винт 36 через тормозную муфту 39 присоединен к низковольтному электродвигателю 40. На валу 28 установлен шкив 41 ременной передачи, через которую последний связан с валом генератора 42.
На фиг.12 представлена типовая схема управления электродвигателем (группой двигателей), изменяющим величину шага соответствующего винта (винтов).
Работа по схемам фиг.11 и 12 происходит следующим образом. Электродвигатель 26, вращая вал 28, вращает воздушный винт 12, шлицевую втулку 31 и шкив 41. При этом генератор 42 вырабатывает переменный ток с напряжением 380 В. Включив выключатель QF, оператор, сидящий в кабине 22, подает напряжение на разомкнутые контакты контакторов КМВ, КМН, кнопок управления SB, SH, концевых выключателей SQB, SQH (контакты последних замкнуты). При этом электродвигатель М (40) не работает, муфта 39 заторможена, положение лопастей винта 12 относительно точки крепления к валу 28 зафиксировано тормозной муфтой 39 (допустим, на величине шага равном нулю). При нажатии пружинной кнопки SB ток напряжением 220 В поступает на катушки контактора КМВ, который замыкает контакты КМВ и размыкает контакты КМН1. Ток поступает к двигателю М (40) и катушке У тормозной муфты 39, которая растормаживается. Вращающийся вал-винт 36 перемещает гайку 35 (допустим, в положение на фиг.11). Если удерживать кнопку SB дальше, то гайка 35, двигаясь поступательно, нажмет, например, тягой 34 на флажок концевого выключателя (не показано) и тем самым откроет контакт SQB. Контактор КМВ обесточится, открыв контакт КМВ и закрыв контакт КМН1. Электродвигатель М (40) и катушка У обесточатся. Тормозная муфта 39 (под действием имеющихся в ней пружин) остановит вращение вала-винта 36 и поступательное движение гайки 35, зафиксировав тем самым максимальную величину шага винта 12. При этом сила воздушной струи в одну сторону также максимальна. При нажатии на кнопку SH срабатывает контактор КМН, открывающий контакт КМВ1 и замыкающий контакт КМН. Электродвигатель М (40) будет вращаться в обратную сторону, гайка 35 двинется также в обратном направлении вплоть до размыкания контактов SQH. Начиная с нулевой величины шага, струя воздуха подует в обратную сторону, т.е. изменится вектор тяги воздушного винта 12.
Данная на фиг.12 электрическая схема управления шагом может быть использована также и в управлении шагом несущих винтов.








Изобретение относится к стартовым сооружениям ракет-носителей космического назначения. Предлагаемая система содержит жесткую пространственную решетку, например, состоящую из нескольких секций, одновременно горизонтально смещаемых относительно вертикальной оси симметрии решетки. На верхних узловых точках решетки смонтированы многолопастные вертолетные винты регулируемого шага с электромеханическим высоковольтным приводом. На общей с ними оси установлены немноголопастные винты с реактивным приводом, а по периметру решетки - воздушные винты с изменяемым направлением тяги, также снабженные электромеханическим приводом. С краю от оси симметрии решетки (в частности, на отдельно летящей решетке с несущими винтами) закреплены высоковольтные провода токоподвода, а на противоположном краю смонтирована шумозащищенная кабина управления. К нижним узловым точкам решетки прикреплены стропы, нижние концы которых присоединены с возможностью отделения к приспособлению для удержания космической ракеты. Технический результат изобретения направлен на повышение надежности пуска тяжелых и сверхтяжелых космических ракет с расчетной высоты их подъема в тропосфере. 3 з.п. ф-лы. 12 ил.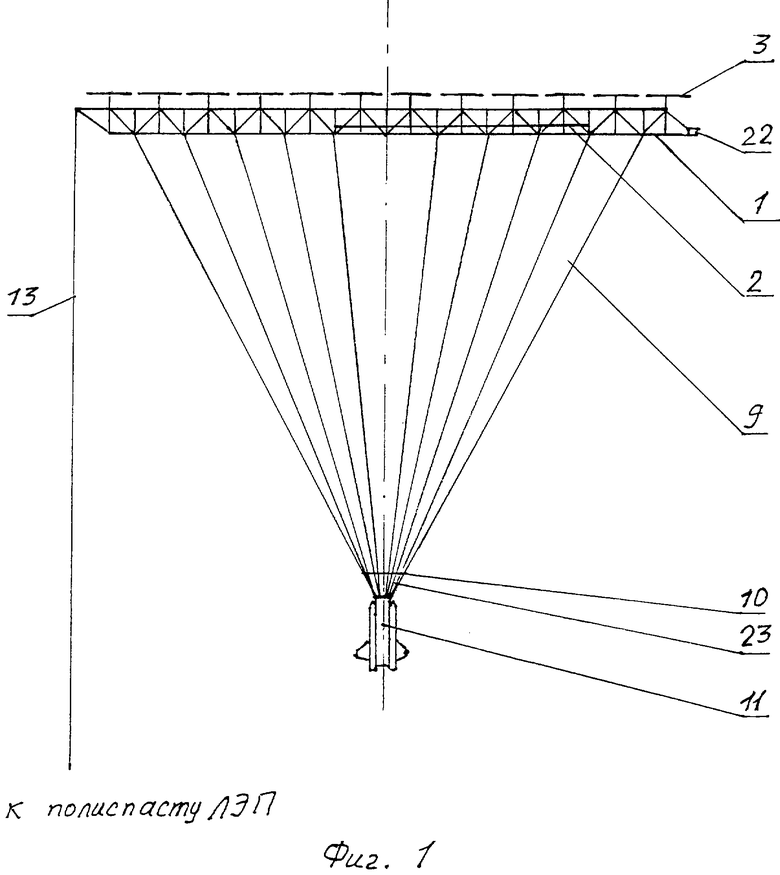
| US 4296892 А, 27.10.1981 | |||
| US 5842665 А, 01.12.1998 | |||
| Аэростат для подъема и выпуска ракет в стратосфере | 1934 |
|
SU47904A1 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ВЕРТОЛЕТА | 1995 |
|
RU2087831C1 |

