Изобретение относится к авиационной технике, в частности к устройствам для транспортирования грузов вертолетами, и может быть использовано как стартовое сооружение ракет-носителей космического назначения.
Известно устройство для транспортирования и монтажа груза вертолетами (RU 2340513 С2, 07.11.2006), состоящее из подвесных систем для двух вертолетов, к которым присоединена распорная конструкция. В средней части распорной конструкции размещена платформа с установленной на ней с возможностью вращения грузовой траверсой. К концам траверсы прикреплены грузозахватные приспособления. Для выполнения поворотов и перемещений грузовой траверсы устройство снабжено приводом. Платформа смонтирована с возможностью перемещения вдоль продольной оси распорной конструкции. Дополнительно платформа снабжена фиксатором, а привод грузовой траверсы снабжен механизмом торможения барабана. Решение обеспечивает возможность не только транспортировать груз, но и корректировать положение груза без изменения положения вертолетов.
Недостатком указанного устройства является малая грузоподъемность, ограниченная суммарной грузоподъемностью двух вертолетов. Другой недостаток заключается в большой трудоемкости и повышенной опасности совместной работы двух экипажей вертолетов.
Наиболее близким аналогом, прототипом настоящего изобретения, является система воздушного пуска космических ракет (RU 2268209 С2, 16.04.2003), имеющая устройство предварительного подъема космической ракеты в тропосфере, выполненное в виде жесткой пространственной решетки, цельной или состоящей из нескольких близких друг к другу по массе секций с возможностью их одновременного горизонтального смещения относительно вертикальной оси симметрии решетки, на верхних узловых точках которой смонтированы многолопастные вертолетные винты с электромеханическим приводом и регулируемым шагом, имеющие на общей оси вращения немноголопастные вертолетные винты с реактивным приводом, по периметру решетки установлены воздушные винты с электромеханическим приводом и с возможностью перемены направления вектора их тяги, с краю от оси симметрии решетки закреплены высоковольтные провода токоподвода, на противоположном краю решетки смонтирована шумозащищенная кабина управления, а к нижним узловым точкам решетки закреплены стропы, нижние концы которых прикреплены с возможностью отделения к приспособлению для удержания космической ракеты. Устройство позволяет поднимать тяжелые и сверхтяжелые космические ракеты с последующим осуществлением их запуска с расчетной высоты в тропосфере.
Недостатком этой системы является повышенная опасность работы экипажа в шумозащищенной кабине (как при запуске ракеты, так и при ее подъеме вблизи земли и при транспортировке в точку старта), вызванная воздействием на всю конструкцию возмущений от воздушной струи запускаемой ракеты и вертолетных струй. Другим недостатком системы является ее зависимость от токоподвода, что уменьшает радиус действия системы и высоту подъема.
Задачей заявляемого изобретения является обеспечение автономности и повышение безопасности полета системы для подъема и транспортировки по воздуху тяжелых грузов.
Поставленная задача решена благодаря тому, что система для подъема и транспортировки по воздуху тяжелых грузов, содержащая жесткую пространственную решетку, в узловых точках которой установлены воздушные движители и приспособления для крепления груза, в соответствии с изобретением снабжена пилотируемым вертолетом, связанным с пространственной решеткой с возможностью экстренного отсоединения, а в узловых точках пространственной решетки установлены беспилотные вертолеты, система управления которых связана с общей системой управления полетом, при этом воздушные движители беспилотных вертолетов выполнены в виде двух соосно расположенных винтов, вращающихся в разные стороны и имеющих автоматы перекоса.
Пилотируемый вертолет может быть связан с жесткой пространственной решеткой выше груза по центру пространственной решетки с помощью тросов, узлы крепления которых к пространственной решетке снабжены замками с экстренным отсоединением или пиропатронами.
В другом варианте системы пилотируемый вертолет может быть связан с жесткой пространственной решеткой с помощью жестких элементов, узлы крепления которых к пространственной решетке снабжены замками с экстренным отсоединением или пиропатронами.
Установка в узловых точках пространственной решетки беспилотных вертолетов, например, с двигателем внутреннего сгорания и с топливными баками или с электроприводом и с аккумуляторными батареями делает систему в отличие от аналога автономной, не связанной с землей и источником энергии.
Использование беспилотных вертолетов с сосной схемой делает возможным в отличие от аналога однотипное управление группой беспилотных вертолетов системы и обеспечивает перемещение системы в любом требуемом направлении во всем диапазоне скоростей.
Размещение оператора, управляющего системой, не в кабине, закрепленной на пространственной решетке, а на дополнительном пилотируемом вертолете, связанном с решеткой с возможностью экстренного отсоединения, например, с помощью замков с экстренным расцеплением или пиропатронов, обеспечивает безопасность системы. Управление системой при подъеме, перемещении и спуске груза осуществляется дистанционно на безопасном для экипажа расстоянии.
Форма пространственной решетки (число модульных элементов) и количество беспилотных вертолетов, а также местоположение пилотируемого вертолета и средства соединения пилотируемого вертолета и пространственной решетки (или при необходимости - пилотируемого вертолета и груза или специального приспособления для установки и крепления груза на пространственной решетке) могут варьироваться в соответствии с размером, весом и типом груза.
Таким образом, изобретение позволяет обеспечить автономность работы системы и повышает безопасность работы экипажа за счет возможности отсоединения пилотируемого вертолета от всей конструкции при чрезвычайных ситуациях и запуске ракеты.
Изобретение поясняется чертежами, на которых изображены:
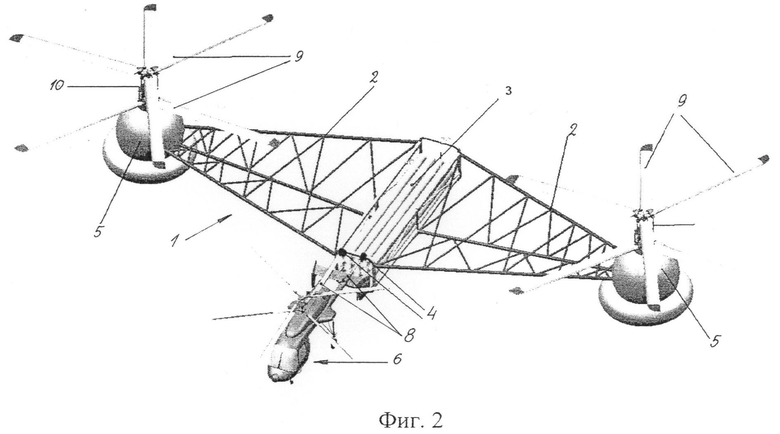
Фиг.1 - система для подъема и транспортировки по воздуху тяжелых грузов (пилотируемый вертолет над пространственной решеткой и грузом);
Фиг.2 - система для воздушной транспортировки по воздуху тяжелых грузов (пилотируемый вертолет впереди пространственной решетки и груза).
Система для подъема и транспортировки по воздуху тяжелых грузов, используемая в частности для запуска ракет (фиг.1), содержит жесткую пространственную решетку 1, которая может быть выполнена цельной или содержащей несколько близких друг к другу по массе секций 2, например, из четырех горизонтально расположенных и одной вертикально расположенной секций. Для крепления груза 3 пространственная решетка 1 снабжена крепежными узлами и имеет в узловых точках 4 узлы для замков с экстренно расцепляющими пиропатронами.
На периферийных узловых точках секций 2 пространственной решетки 1 установлены несколько (например, четыре) беспилотных (дистанционно пилотируемых) вертолетов 5.
Пилотируемый экипажем вертолет 6 присоединен, например, с помощью тросов 7 в узловых точках 4 к жесткой пространственной решетке с возможностью отсоединения.
Связь между системами управления полетом дистанционно пилотируемых вертолетов 5 и экипажем пилотируемого вертолета 6 осуществляется системой радиоуправления (не показана).
На фиг.2 изображена система для воздушной транспортировки тяжелых грузов, когда пилотируемый вертолет расположен впереди пространственной решетки с грузом.
Система также содержит жесткую пространственную решетку 1, которая выполнена цельной или состоящей из нескольких близких друг к другу по массе секций 2 (например, из двух секций) и к узловым силовым точкам которой может крепиться груз 3 (расположенный, например, в контейнере).
В других, периферийных узловых точках пространственной решетки 1 установлены несколько (например, два) беспилотных (дистанционно пилотируемых) вертолетов 5.
К пространственной решетке присоединен, например, с помощью жестких продольных элементов 8 с возможностью экстренного отсоединения пилотируемый экипажем вертолет 6.
Беспилотные вертолеты 5 состоят из движителя (например, реактивного), двух соосно расположенных винтов 9, вращающихся в разные стороны, каждый из которых имеет свой автомат перекоса 10, а также топливный бак и систему управления полетом (не показаны).
Во всех случаях узлы крепления пилотируемого вертолета 6, связанные с тяжелым грузом 3, снабжены средствами экстренного отсоединения, например электромеханическими замками, снабженными пиропатронами (не показаны), которые имеют связь с бортом пилотируемого вертолета.
Система для подъема и транспортировки по воздуху тяжелых грузов работает следующим образом. В нерабочем положении пилотируемый экипажем вертолет 6 находится на вертолетной площадке, размещенной недалеко от тяжелого груза 3. Пространственная решетка 1 жестко соединяется с тяжелым грузом 3 или с контейнером, в котором он находится. К пространственной решетке 1 или к ее секции 2 жестко прикрепляют беспилотные, дистанционно пилотируемые вертолеты 5. Форма решетки, количество секций и число беспилотных вертолетов зависит от характера, формы и веса тяжелого груза.
После окончания сборочных работ пилотируемый экипажем вертолет 6 взлетает с присоединенными к его внешней подвеске узлами (фиг.1) для крепления тяжелого груза и зависает над грузом. Стропальщики соединяют груз 3 с крепежными узлами пространственной решетки 1 с помощью электромеханических замков с пироболтами. При установке пилотируемого вертолета спереди (фиг.2) одновременно с ним взлетают беспилотные вертолеты. Подъем тяжелого груза 3 осуществляется путем запуска движителей винтов всех беспилотных вертолетов 5 по командам, поступающим от экипажа пилотируемого вертолета 6 на систему управления полетом. При подъеме тяжелого груза 3 на определенную высоту, задаваемую экипажем пилотируемого вертолета 6 путем подачи команд на изменение общего шага винтов 9 в автоматы перекоса 10 через системы управления полетом беспилотных вертолетов 5, осуществляется ее стабилизация. Горизонтальное перемещение, т.е. транспортировка тяжелого груза 3, осуществляется путем подачи экипажем сигнала на беспилотные вертолеты 5 об одновременном изменении циклического шага винта 9 автомата перекоса 10. При этом системы управления полетом беспилотных вертолетов 5 продолжают стабилизировать заданную ранее высоту полета. Это позволяет демпфировать возможные колебания системы от ветровых и инерционных воздействий.
Посадка всей системы осуществляется в порядке, обратном подъему: экипаж пилотируемого вертолета 6 дает команду на уменьшение высоты, системы управления дистанционно пилотируемых вертолетов 5 выдают команды в автоматы перекоса 10 на уменьшение общего шага винтов 9, система уменьшает высоту до касания груза 3 с земной поверхностью. После приземления груза приспособление для транспортировки тяжелого груза отсоединяется от узлов пространственной решетки 1 с помощью электромеханических замков, и пилотируемый вертолет 6 возвращается на посадочную площадку, а тяжелый груз 3 отсоединяется от пространственной решетки 1.
При возникновении чрезвычайных ситуаций, связанных с непредусмотренными ветровыми воздействиями на систему, повреждениями конструкции, отказами движителей и другими ситуациями, представляющими опасность экипажу пилотируемого вертолета 6, экипаж подает сигнал на крепежные узлы в узловых точках 4 пространственной решетки, пироболты срабатывают и стропы 7 или жесткие элементы 8 крепежного приспособления отсоединяются от соответствующих узлов пространственной решетки. Такую же операцию экипаж осуществляет перед воздушным запуском баллистической ракеты (фиг.1). Дальнейшее управление всей конструкцией осуществляется дистанционно на безопасном для экипажа расстоянии.
Изобретение относится к авиационной технике и может быть использовано для подъема и транспортировки по воздуху тяжелых грузов. Система содержит жесткую пространственную решетку, в узловых точках которой сверху установлены беспилотные вертолеты, а снизу - узлы крепления груза. Беспилотные вертолеты состоят из движителя в виде двух соосно расположенных винтов, вращающихся в разные стороны, каждый из которых имеет свой автомат перекоса, топливного бака и системы управления полетом. Системы управления беспилотных вертолетов связаны с общей системой управления полетом. К пространственной решетке подсоединен с возможностью экстренного отсоединения пилотируемый экипажем вертолет. Узлы крепления пилотируемого вертолета к жесткой пространственной решетке содержат замки с экстренным отсоединением или пиропатронами. Пилотируемый вертолет может быть связан с пространственной решеткой или выше груза, или спереди. Система обеспечивает повышенную безопасность экипажа при подъеме и транспортировке груза. 2 з.п. ф-лы, 2 ил.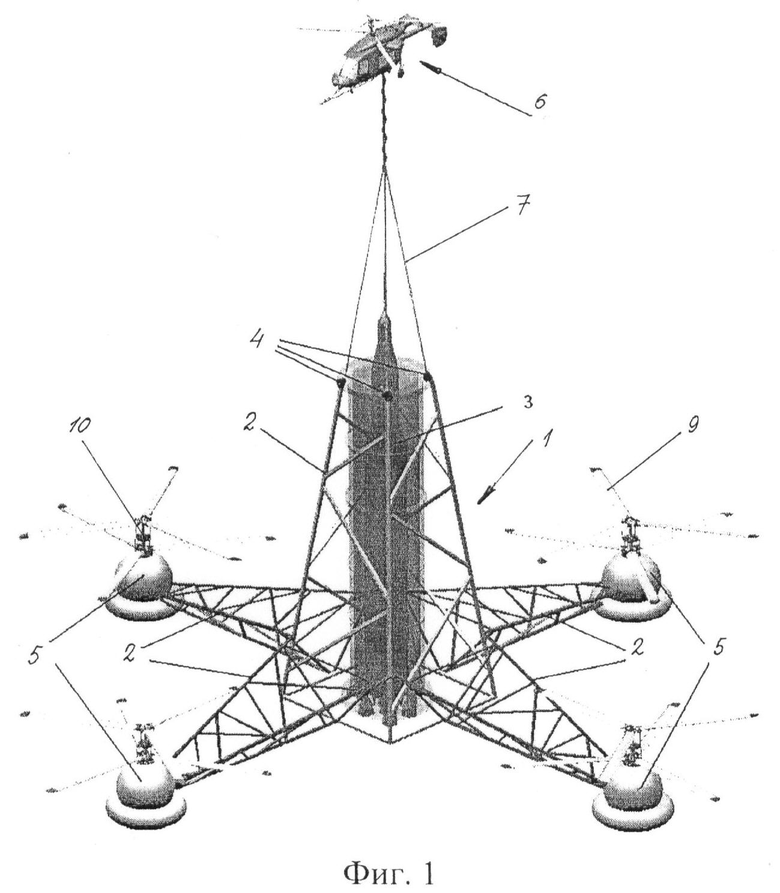
1. Система для подъема и транспортировки по воздуху тяжелых грузов, содержащая жесткую пространственную решетку, в узловых точках которой установлены воздушные движители и узлы для крепления груза, отличающаяся тем, что она снабжена пилотируемым вертолетом, связанным с пространственной решеткой с возможностью экстренного отсоединения, а в узловых точках пространственной решетки установлены беспилотные вертолеты, система управления которых связана с общей системой управления полетом, при этом воздушные движители беспилотных вертолетов выполнены в виде двух соосно расположенных винтов, вращающихся в разные стороны и имеющих автоматы перекоса.
2. Система по п.1, отличающаяся тем, что пилотируемый вертолет связан с жесткой пространственной решеткой выше груза по центру пространственной решетки с помощью тросов, узлы крепления которых к пространственной решетке снабжены замками с экстренным отсоединением или пиропатронами.
3. Система по п.1, отличающаяся тем, что пилотируемый вертолет связан с жесткой пространственной решеткой спереди с помощью жестких элементов, узлы крепления которых к пространственной решетке снабжены замками с экстренным отсоединением или пиропатронами.
| СПОСОБ ПЕРЕМЕЩЕНИЯ В ПРОСТРАНСТВЕ ЗНАЧИТЕЛЬНЫХ ПО МАССЕ ГРУЗОВ И ВИНТОМОТОРНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2159197C2 |
| JP 2002068091 A, 09.03.2002 | |||
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗА ВЕРТОЛЕТАМИ НА ВНЕШНЕЙ ПОДВЕСКЕ | 1989 |
|
RU1663886C |
| СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗА ВЕРТОЛЕТАМИ НА ВНЕШНЕЙ ПОДВЕСКЕ | 1983 |
|
SU1113993A1 |

