Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний относится к средствам топографии и навигации, в частности, к средствам измерения углов, расстояний и их комбинации. Комплект может быть использован для управления стрельбой артиллерии (ствольной и реактивных систем залпового огня), летательными аппаратами оперативно-тактической и армейской авиации и предназначен для оснащения войсковых разведчиков, корректировщиков артиллерийского огня, передовых авиационных наводчиков (далее - операторов комплекта).
Задачами комплекта являются его собственная топогеодезическая привязка на местности и измерение относительного положения цели, что позволяет рассчитать ее координаты. Результатом работы заявляемого комплекта являются его координаты, дальность, дирекционный угол и угол места цели, а также ее координаты. Возможность и качество решения этих задач зависит от состава технических средств комплекта, наличия априорных данных (об ориентирах, реперных точках, опорных пунктах и др.), доступности внешних источников информации (спутниковых навигационных систем и др.). В зависимости от перечисленных условий возможны различные режимы работы комплекта.
Известна артиллерийская буссоль [1], содержащая поворотный механизм с опорой, одноосевой магнитометр (компас) и визирное устройство. В качестве поворотного механизма используются шаровый зажим и артиллерийская буссоль. Шаровый зажим предназначен для начальной установки (горизонтирования) буссоли на опоре (треноге) с помощью пузырькового уровня. Буссоль обеспечивает наведение визирного устройства на цель. Результаты измерений - углы азимута и места - считываются оператором со шкал поворотного механизма буссоли.
Недостатками устройства [1] являются ограниченные функциональные возможности, обусловленные невозможностью решения задачи топогеодезической привязки из-за использования только одного измерительного прибора - магнитного компаса.
Известен лазерный целеуказатель - дальномер [2], содержащий комплект приборов, включающий поворотный механизм с опорой, одноосевой магнитометр, дальномер, компьютер оператора комплекта, соединенный с дальномером, модулем спутниковых навигационных систем (СНС) с антенной, а также каналом беспроводной связи. В целеуказателе [2], кроме перечисленных устройств, предусмотрена возможность использования лазерного гирокомпаса с оптическим визиром и барометрического датчика давления. Гирокомпас в режиме ориентирования устанавливается вместо дальномера и позволяет определять дирекционные углы направлений на ориентиры. Барометрический датчик позволяет вычислить давление в месте расположения цели. В целеуказателе [2] в качестве поворотного механизма используются буссоль и шаровый зажим, а целеуказатель устанавливается на опору (треногу). Наличие модуля СНС позволяет частично решить задачу топопривязки, а компьютер и канал связи - повысить оперативность получения исходных данных и отправки результатов целеуказания - информационного сообщения о координатах целеуказателя и цели, а также ряда служебных данных.
Недостатками устройства [2] являются ограниченные функциональные возможности, большие размеры и вес. Ограниченные функциональные возможности обусловлены сложностью топогеодезической привязки, вызванной необходимостью неоднократной переустановки дальномера и гирокомпаса. Также отсутствует функциональное и конструктивное единство магнитного компаса, дальномера, гирокомпаса и модуля СНС.
Наиболее близким к заявляемому изобретению является [3] комплект выносной аппаратуры топопривязчика, содержащий поворотный механизм с опорой, одноосевой магнитометр, дальномер, компьютер оператора комплекта, соединенный с дальномером, модулем спутниковых навигационных систем с антенной и каналом беспроводной связи. Комплект базируется на автомобиле и позволяет вести топопривязку в исходной точке движения, на маршруте и в конечной точке. В этом комплекте содержатся и могут использоваться гирокомпас, теодолит и угломерное устройство СНС. Обработка информации ведется с использованием компьютера, а передача информации обеспечивается радиостанцией, входящей в состав комплекта. Комплект [3] позволяет сохранять топопривязку в процессе движения автомобиля, в том числе с использованием одометра. Комплект топопривязчика [3] не предназначен для решения задачи целеуказания, для которой предполагается использование других средств.
Недостатками комплекта [3] являются ограниченные функциональные возможности, большие размеры и вес. Ограниченные функциональные возможности обусловлены отсутствием функционального и конструктивного единства источников измерений: гирокомпаса, магнитометра, СНС, теодолита и дальномера. Использование автомобиля для перевозки комплекта снижает оперативность и скрытность, делает невозможным его использование одиночным оператором.
Все аналоги заявляемого изобретения имеют общие недостатки:
1. Представляют собой комплект разрозненных приборов, которые для использования необходимо собирать, устанавливать, переставлять и т.п., что требует временных и физических затрат.
2. Нуждаются в опоре в виде тяжелой треноги.
3. В качестве поворотного механизма используют тяжелую буссоль.
4. Требуют точной установки буссоли в горизонтальной плоскости, что приводит к значительным временным затратам.
5. Оценка углов производится оператором комплекта по шкалам буссоли и/или теодолита, что не позволяет автоматизировать измерения.
Задача, стоящая перед разработчиками заявляемого комплекта, состоит в создании малогабаритного, легкого, универсального прибора, способного с высокой точностью и в различных условиях оперативно решать задачи топогеодезической привязки и формирования целеуказаний.
Техническими результатами использования заявляемого изобретения являются:
• малые габариты и вес комплекта, что обеспечивает его транспортировку и применение одним оператором;
• наличие различных микро-измерителей в составе комплекта, что позволяет:
- выбирать различные режимы работы в зависимости от наличия априорных данных и доступности внешних источников информации;
- отказаться от строгого горизонтирования комплекта;
- повысить точность измерений.
Для достижения этого результата комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний, содержащий поворотный механизм с опорой, дальномер, компьютер оператора комплекта, соединенный с дальномером, модулем спутниковых навигационных систем с антенной и каналом беспроводной связи, дополнительно оснащен электронным угломерным устройством, выполненным в виде блока, содержащего контроллер, который соединен с органами локального управления и индикации, трехосевыми датчиком угловой скорости, акселерометром и магнетометром с согласованными между собой осями чувствительности, датчиком температуры, двухканальным угломерным модулем спутниковых навигационных систем с возможностью подключения к каждому каналу отдельной выносной антенны с собственным средством установки, контроллер электронного угломерного устройства соединен информационно и по питанию с компьютером оператора комплекта, блок электронного угломерного устройства механически с помощью безлюфтовых разъемных соединений связан с дальномером и поворотным механизмом.
Заявляемое устройство иллюстрируют следующие графические материалы:
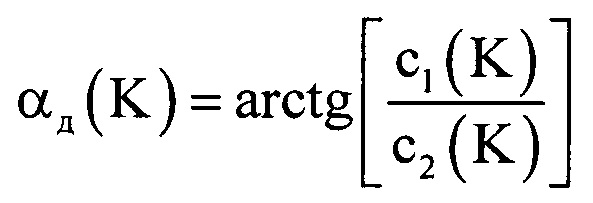
Фиг. 1 Структурная схема комплекта, где:
1. Поворотный механизм.
2. Опора.
3. Дальномер.
4. Компьютер оператора комплекта.
5. Модуль СНС.
6. Антенна модуля СНС.
7. Канал беспроводной связи.
8. Электронное угломерное устройство.
9. Контроллер.
10. Органы локального управления и индикации.
11. Трехосевой датчик угловой скорости (ДУС).
12. Трехосевой акселерометр.
13. Трехосевой магнитометр.
14. Двухканальный угломерный модуль (ДУМ) СНС.
15. Выносные антенны ДУМ.
16. Датчик температуры.
17. Безлюфтовое соединение с дальномером.
18. Безлюфтовое соединение с поворотным механизмом.
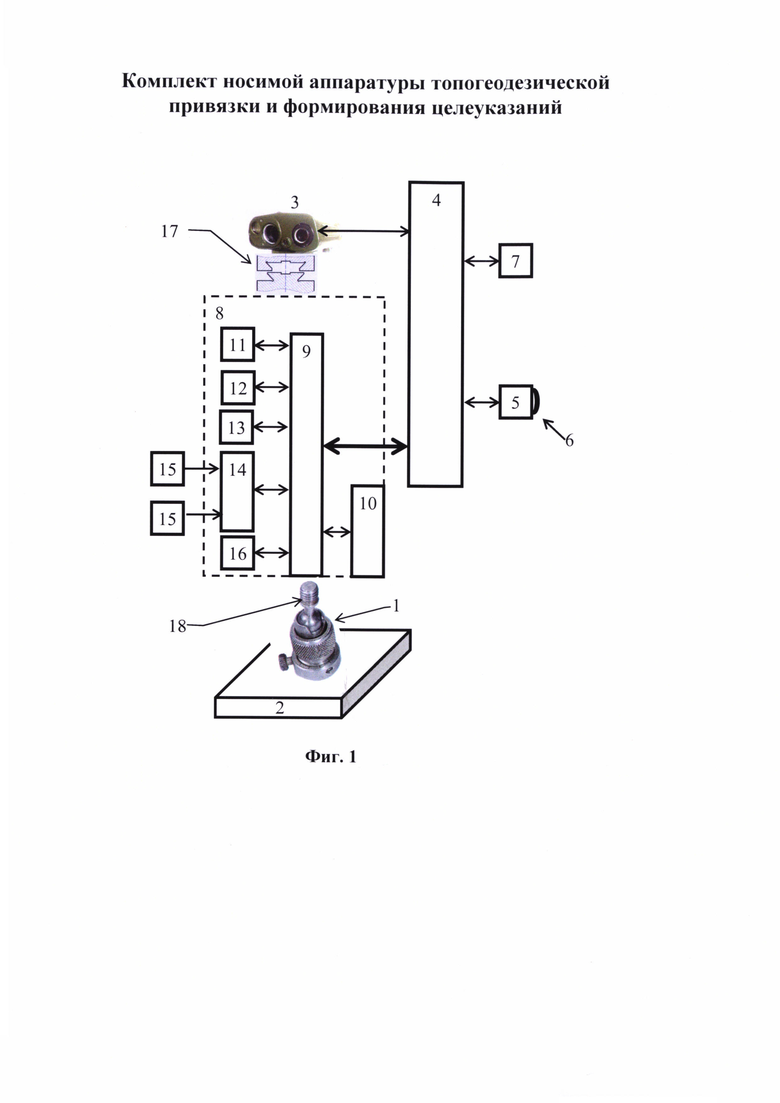
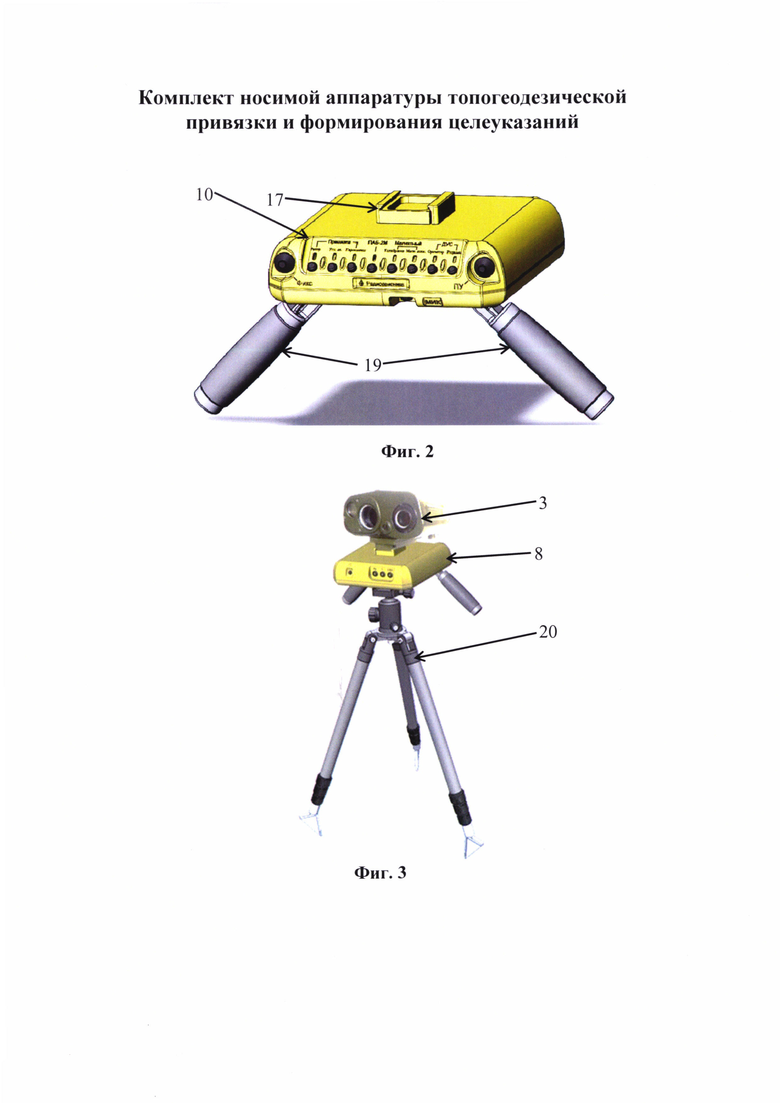
Фиг. 2 Внешний вид электронного угломерного устройства 8, где:
19 - Откидные держатели.
Фиг. 3 Собранный комплект с дальномером 3, электронным угломерным устройством 8 и опорой 2 в виде треноги 20.
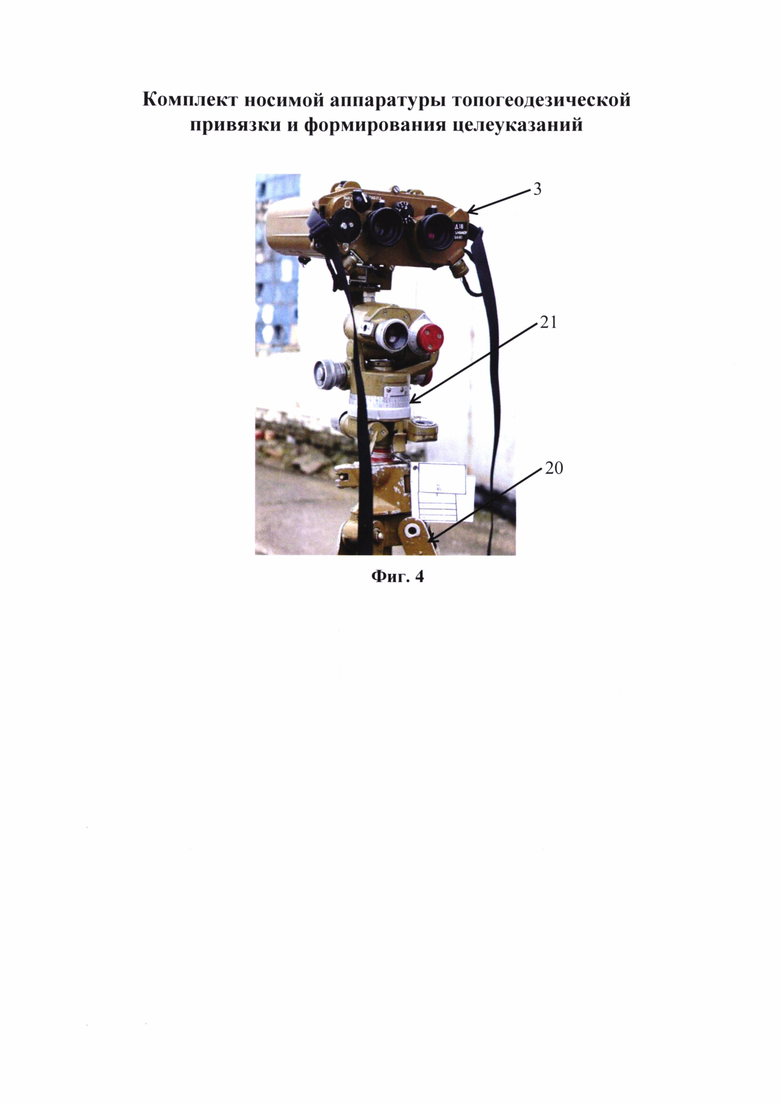
Фиг. 4 Собранный комплект с поворотным механизмом в виде буссоли 21.
Существенные отличия заявляемого изобретения от прототипа заключаются в следующем.
Наличие электронного угломерного устройства 8 позволяет быстро и точно выполнить измерения, ввести результаты в компьютер 4 и передать их по каналу беспроводной связи 7 в вышестоящие органы управления.
В прототипе измерение углов проводится по рискам поворотного механизма (буссоли), не точно и не может быть оперативно обработано компьютером 4.
Выполнение электронного угломерного устройства 8 в виде блока, содержащего контроллер 9, к которому подключены органы локального управления и индикации 10, позволяет автоматизировать (упростить и ускорить) процесс управления режимами измерений, наблюдать за ходом их выполнения, а также в реальном масштабе времени передавать результаты измерений в компьютер 4. Благодаря описанным ниже технологиям электронное угломерное устройство 8 оказывается малогабаритным и легким.
В прототипе изменение режимов измерений сопряжено с выполнением трудоемких операций оператором комплекта, а сам комплект является тяжелым и громоздким.
Трехосевые ДУС, акселерометр и магнитометр выполнены в виде единого устройства, позволяющего использовать вектор силы тяжести, угловые скорости вращения Земли и самого комплекта, а также вектор магнитного поля Земли (совместно или по отдельности) в различных режимах с возможностью автоматической передачи результатов измерений.
В прототипе отсутствует акселерометр, используются одноосевой магнитометр и гирокомпас. Все эти устройства разрозненны и не позволяют использовать результаты их измерений в автоматическом режиме.
Оси чувствительности датчика угловой скорости 11, акселерометра 12 и магнитометра 13 согласованы, что позволяет упростить совместную обработку измерений. Указанные оси также согласованы со связанными осями электронного угломерного устройства 8 и дальномера 3. Согласованность осей позволяет упростить вычисления.
В прототипе таких источников измерений нет, поэтому результаты обработки являются малоинформативными, а их прием и передача выполняются оператором вручную.
Датчик температуры 16 предназначен для уточнения результатов измерений датчика угловой скорости 11, акселерометра 12 и магнитометра 13 путем введения поправок по градировочным зависимостям систематических ошибок датчиков от температуры, закладываемым в датчики при заводской калибровке.
В прототипе датчика температуры нет.
Наличие двухканального угломерного модуля СНС 14 в электронном угломерном устройстве 8 с возможностью подключения к каждому каналу отдельной выносной антенны 15 позволяет решить задачу угловой ориентации комплекта без использования остальных датчиков и искусственных и естественных ориентиров на местности.
В прототипе отсутствует угломерный модуль, но предполагается возможность использования двух отдельных модулей СНС с антеннами для измерения углов.
Электронное угломерное устройство 8 соединено информационно и по питанию с компьютером 4. Информационное соединение позволяет быстро передать результаты измерений (азимут и угол места) в компьютер 4 и по каналу связи 7 на вышестоящие уровни. Связь по питанию позволяет уменьшить вес электронного угломерного устройства 8 за счет отсутствия собственных источников питания.
В прототипе угломерное устройство (буссоль) не имеет питания.
Электронное угломерное устройство 8 соединено механически безлюфтовыми разъемными соединениями 17 и 18 с дальномером 3 и поворотным механизмом 1 соответственно.
В прототипе отсутствует электронное угломерное устройство.
Рассмотрим возможность реализации заявляемого комплекта.
Поворотный механизм 1 предназначен для наведения дальномера 3 на цель по азимуту и углу места. В аналогах [1-3] это действие выполняется в два этапа: горизонтирование буссоли и наведение буссоли на цель, Фиг. 4. Аналогичная процедура может быть использована и в заявляемом комплекте. Для этого используются тренога 20, шаровый зажим 1, Фиг. 1 и буссоль 21, Фиг. 4.
Тренога 20 устанавливается на землю путем изменения длин ног и их заглубления, так, чтобы ее верхняя поверхность была горизонтальной. На треноге 20 устанавливается шаровый зажим 1, который состоит из шаровой чашки с зажимным механизмом, средства крепления к опоре 2 (шуруп) и шаровой опоры, установленной на буссоли 21. Затем производится горизонтирование буссоли 21 с использованием ее пузырькового уровня. После горизонтирования буссоли 21 шаровый зажим фиксируется. Для наведения дальномера 3 на цель используется буссоль 21 за счет ее поворота в горизонтальной и вертикальной плоскостях.
В заявляемом изобретении могут использоваться более простые технологии. Трехосевой акселерометр 12, используемый в качестве инклинометра, дает возможность измерить проекции вектора силы тяжести Земли и по ним вычислить положение ортогональной ему плоскости местного горизонта. Наличие такой возможности позволяет ориентировать угломерное устройство 8, не предъявляя высоких требований по точности его горизонтирования. Аналогичные возможности дает трехосевой магнитометр 13, который также позволяет построить плоскость местного горизонта.
Это дает возможность отказаться от тяжелой треноги 20 в качестве опоры 2. Вместо треноги может быть использована любая опора 2 - пень, дерево и т.п., к которой крепится, например, шаровый зажим, а на нем устанавливаться электронное угломерное устройство 8.
Кроме того, в заявляемом комплекте появляется возможность отказаться от тяжелого поворотного устройства - буссоли 21 (теодолита). Вместо этого в заявляемом комплекте может использоваться, например, шаровый зажим 1.
Дальномер 3 предназначен для наведения на цель, наблюдения за ней и измерения расстояния до нее. В качестве дальномера могут использоваться лазерные дальномеры, приборы ночного видения и т.п. Такие устройства требуют бережного отношения, транспортируются в отдельном боксе, а на время работы подключаются к комплекту безлюфтовым соединением 17, например, типа «ласточкин хвост». Дальномер 3 может иметь разные механизмы крепления 17, что приводит к необходимости использования соответствующих переходников, входящих в состав заявляемого комплекта.
Компьютер оператора комплекта 4 является необходимым элементом приборного оснащения современного военнослужащего. Известны компьютерные системы военнослужащего: FELIN (Франция), Future ForceWarrior (США), Gladius (Германия), Стрелец (РФ) [4] и т.п. Такой компьютер обеспечивает военнослужащего каналом беспроводной связи 7, навигационной информацией через модуль СНС 5 с антенной 6, а также выполняет ряд других функций по управлению и разведке. Обладая достаточно большой вычислительной мощностью, компьютер 4 поддерживает другие информационные модули оснащения военнослужащего. В заявляемом изобретении основные задачи обработки информации, а также обеспечение энергоснабжения решает компьютер 4.
Электронное угломерное устройство 8, Фиг. 2, предназначено для измерения азимута и угла места. В заявляемом устройстве для их определения используется математическая обработка результатов измерений электронных датчиков 11-14 с учетом показаний датчика температуры 16.
Контроллер 9 предназначен для:
- получения команд из органов локального управления и индикации стадии их выполнения через блок 10;
- организации заданных режимов работы угломерного устройства 8;
- передачи полученных результатов в компьютер 4.
Трехосевой ДУС 11, трехосевой акселерометр 12 и трехосевой магнитометр 13 составляют основу известных бесплатформенных инерциальных навигационных систем (БИНС). Для носимого исполнения БИНС, соответствующего заявляемому комплекту, предпочтение следует отдать малогабаритным микроэлектромеханическим системам (МЭМС), содержащимся, например, в большинстве обычных смартфонов. В качестве технологии изготовления может быть использовано решение фирмы Интел [5]. Среди множества вариантов исполнения МЭМС следует выбирать образцы, удовлетворяющие требованиям по точности измерений.
ДУМ спутниковых навигационных систем 14 предназначен для угловых измерений между двумя выносными, разнесенными антеннами 15 СНС. Такие модули выпускаются промышленностью.
Датчик температуры 16 зачастую входит в состав МЭМС.
Безлюфтовое соединение 17 с дальномером 3 обеспечивает бережную транспортировку дальномера, а также быструю подготовку к работе. В качестве такого соединения может использоваться, например, «ласточкин хвост».
Начальная установка комплекта состоит в том, что поворотный механизм 1 устанавливается на опору 2, к нему безлюфтовым соединением 18 присоединяется электронное угломерное устройство 8, к которому в свою очередь безлюфтовым соединением 17 подключается дальномер 3, Фиг. 3. Наличие в составе устройства 8 соответствующих измерителей позволяет скомпенсировать неточность начальной установки (горизонтирования) комплекта. Угломерное устройство 8 и дальномер 3 подключаются кабелями к компьютеру 4, обеспечивая связь по информации и питанию. При включении электронного угломерного устройства 8 под управлением контроллера 9 трехосевой ДУС 11 готов измерять проекции вектора угловой скорости, трехосевой акселерометр 12 - проекции вектора силы тяжести, трехосевой магнитометр 13 - проекции вектора направления на северный магнитный полюс, а датчик температуры 16 - температуру. Считается, что заводские и полевые калибровки перечисленных датчиков выполнены, см. [6, 7, 8]. Режимы работы комплекта задаются и отображаются с помощью органов локального управления и индикации 10.
Рассмотрим режимы работы заявляемого комплекта.
Ключевым узлом заявляемого комплекта, существенно отличающим его от прототипа, является электронное угломерное устройство 8, объединяющее в себе функции буссоли, теодолита и гирокомпаса. По своей сущности устройство 8 представляет собой измерительную часть угломерного канала БИНС на неподвижном основании, выполненного на принципиально иной по сравнению с прототипом элементной базе, а именно с использованием МЭМС-технологий (датчики 11-13). БИНС дополнена встроенным в устройство 8 двухканальным угломерным модулем 14 с двумя выносными антеннами 15. Модуль 14 имеет большее число (шестьдесят четыре) измерительных каналов, обеспечивающих прием сигналов СНС ГЛОНАСС, GPS, Galileo, SBAS, СДКМ с частотным и кодовым разделением, и реализует более точный по сравнению с прототипом (метод относительного позиционирования) метод углометрии по фазе несущей частоты.
Сказанное позволяет электронному угломерному устройству 8 совместно с дальномером 3 и компьютером оператора 4 (а следовательно, заявляемому комплекту в целом) в полном объеме решать весь перечень задач топогеодезической привязки, выполняемых прототипом.
При формировании целеуказаний основной операцией, помимо измерения дальности до цели (дальномер 3), является определение дирекционного угла αд и угла места β цели. Данная задача решается путем математической обработки результатов измерений датчиков 11-14 в компьютере оператора 4.
В соответствии с составом измерительных датчиков 11-14, входящих в угломерное устройство 8, возможны два основных режима определения углов αд, β.
В первом режиме - режиме измерения магнитного азимута - дирекционный угол αд определяется соотношением:
αд=αи-δαсм=αм+δαмс-δαсм
где αи - истинный азимут, αм - магнитный азимут, δαмс - магнитное склонение, δαсм - сближение меридианов.
При этом магнитный азимут αм вычисляется по формуле:

где Нх, Ну, Hz - проекции магнитного поля Земли, измеряемые магнитометром 13; β - угол места цели, γ - угол крена угломерного устройства 8, вычисляемые по показаниям ах aу, az акселерометра 12 в соответствии с соотношениями:

где g - ускорение силы тяжести в точке установки комплекта. Соотношения (2) определяют работу акселерометра 12 в качестве акселерометрического трехосевого инклинометра.
Формулы (1), (2) описывают работу электронного угломерного устройства 8 в магнитной географической системе координат OEмNмh и связанной системе координат OXYZ с началом в его центре масс. При этом ось OY совпадает с продольной осью оптического визира дальномера 3 и направлена на цель. Данные системы координат широко используются при решении топогеодезических и навигационных задач.
Вторым режимом является гироазимутальный режим (режим гироскопа направления). Этот режим предполагает наличие предварительно выбранного опорного направления, задаваемого дирекционным углом αд оп некоторого ориентира.
Физический смысл этого режима состоит в том, что относительно направления αд оп по измерениям датчика угловой скорости 11 при перенацеливании (вращении) угломерного устройства 8 с ориентира на цель проводится измерение приращения угла Δαд с последующим определением полного значения дирекционного угла цели αд.
Математически при обработке измерений в компьютере оператора 4 этот режим реализуется с помощью рекуррентной процедуры:
где c1 (k)=sinαд(k)cosβ(k), с2(k)=соsαд(k)соsβ(k), c3(k)=sinβ(k) - текущие значения направляющих косинусов оси OY связанной системы координат OXYZ относительно осей географической системы координат (географический трехгранник) OENh, являющейся опорной в задачах инерциальной навигации.
В процедуре (3) δx(k)=ωх(k)Т, δу(k)=ωу(k)Т, δz(k)=ωz(k)T - парциальные (пошаговые) приращения углов вращения угломерного устройства 8; ωх(k), ωу(k), ωz(k) - текущие показания (отсчеты) датчика угловой скорости 11; Т=tk-tk-1 - шаг (интервал времени) выдачи данных датчиком, в течение которого угловые скорости ωх, ωу, ωz считаются постоянными; k=1,2,…, K - номер очередного шага; K - количество шагов (измерительных отсчетов датчика) на интервале перенацеливания угломерного устройства 8 с ориентира на цель.
По окончании перенацеливания (k=K) определяются искомые дирекционный угол цели
и ее угол места

Возможен также вариант определения угла β(K) по соотношению (2) с использованием измерения акселерометра ау(K) на момент окончания перенацеливания.
Необходимые для запуска рекуррентной процедуры (3) начальные условия задаются так:
с1(0)=sinαд опсоsβ(0), с2(0)=соsαд опсоsβ(0), c3(0)=sinβ(0),
где β(0) - угол места ориентира, определяемый соотношением (2) по измерению ау (0) в начальном положении угломерного устройства 8.
Возможны три варианта задания опорного дирекционного угла αд оп:
- с помощью ориентира (репера) с известными координатами и модуля СНС 5, определяющего координаты точки установки комплекта;
- с использованием двухканального угломерного модуля 14 с двумя вынесенными антеннами 15, разнесенными на базу заданной длины, обеспечивающей требуемую точность угловой фазометрии;
- с применением датчика угловой скорости 11 и акселерометра 12 в режиме гирокомпасирования.
В последнем случае для истинного опорного угла азимута αи оп в формуле расчета угла αд оп=αи оп-δсм остается справедливым соотношение (1) при замене проекций магнитного поля Нх Ну, Hz на измеренные датчиком угловой скорости 11 проекции ωх(0), ωу(0), ω2(0) вектора угловой скорости вращения Земли Ω в положении установки угломерного устройства 8 на ориентир:

где, как и ранее, β(0) - угол места ориентира; γ(0) - угол крена угломерного устройства 8. Оба угла определяются соотношениями (2).
В заключение отметим, что при использовании в электронном угломерном устройстве 8 высокоточных образцов датчика угловой скорости 11, обладающих малыми значениями систематической (дрейф нуля) и флюктуационной ошибок (таких как МЭМС-датчики тактического и навигационного классов, миниатюрный волновой твердотельный гироскоп [9]), режим гирокомпасирования может стать самостоятельным режимом в дополнение к двум основным режимам определения углов αд, β цели.
Таким образом, заявляемый комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний может быть реализован. Обладает малыми габаритами и весом и позволяет решать возложенные задачи с достаточной точностью.
Источники информации
1. Перископическая артиллерийская буссоль ПАБ-2. Ордена Трудового Красного Знамени Военное издательство Министерства Обороны СССР, издание четвертое, Москва, 1970 г.
2. Патент RU 2522784.
3. Патент RU 2480714.
4. https://vpk.name/library/f/strelec.html.
5. Патент RU №2602746.
6. Патент RU №2577806.
7. Патент RU №2572109.
8. Заявка на изобретение RU №2016104007, решение о выдаче патента от 15.03.2017.
9. Патент RU №2544870.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОРТАТИВНЫХ КОМПЛЕКТОВ ДЛЯ АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ НА ПОЛЕ БОЯ | 2019 |
|
RU2717138C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| КОМПЛЕКТ ВЫНОСНОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2480714C2 |
| Способ ориентирования мобильных объектов относительно объекта с известным дирекционным углом | 2018 |
|
RU2692945C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| КОМПЛЕКС ДЛЯ ПЕРСОНАЛЬНОЙ НАВИГАЦИИ | 2014 |
|
RU2574309C2 |
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
Комплект относится к средствам топографии и навигации и может быть использован для обслуживания стрельбы артиллерии и наведения авиации. Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний содержит поворотный механизм с опорой, дальномер, компьютер оператора комплекта, соединенный с дальномером, модулем спутниковых навигационных систем с антенной и каналом беспроводной связи. При этом комплект дополнительно оснащен электронным угломерным устройством, выполненным в виде блока, содержащего контроллер, который соединен с органами локального управления и индикации, трехосевыми датчиком угловой скорости, акселерометром и магнетометром с согласованными между собой осями чувствительности, датчиком температуры, двухканальным угломерным модулем спутниковых навигационных систем с возможностью подключения к каждому каналу отдельной выносной антенны с собственным средством установки. Контроллер электронного угломерного устройства соединен информационно и по питанию с компьютером оператора комплекта, блок электронного угломерного устройства механически с помощью безлюфтовых разъемных соединений связан с дальномером и поворотным механизмом. Комплект обладает малыми габаритами и весом и позволяет решать возложенные задачи с достаточной точностью. 4 ил.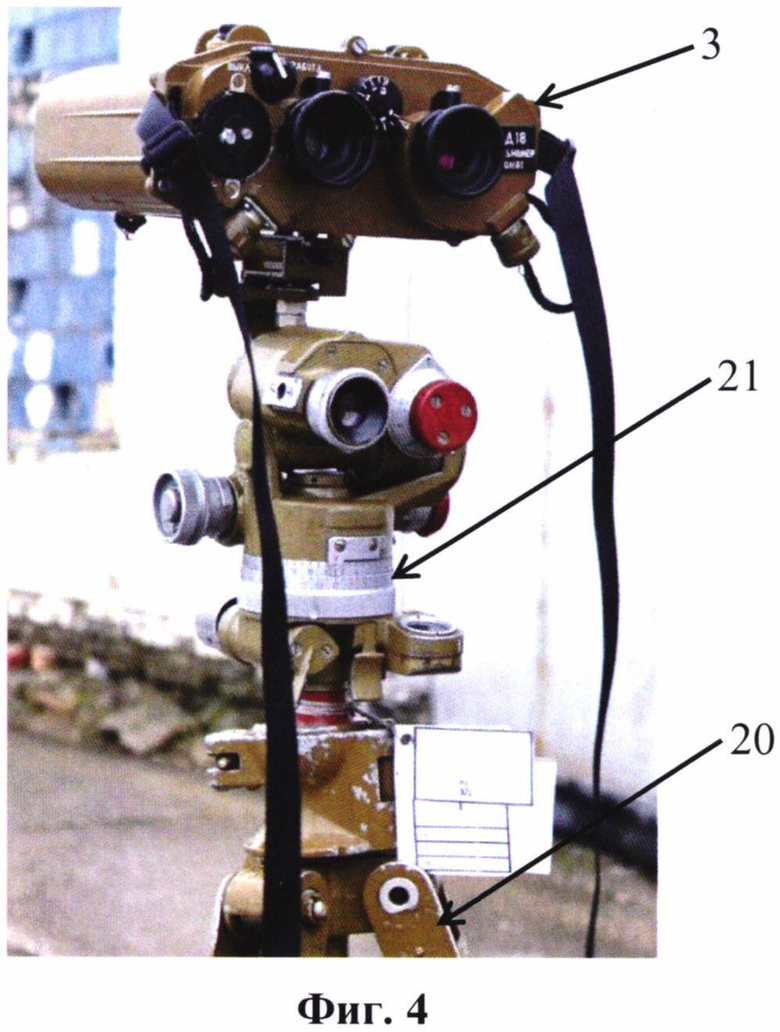
Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний, содержащий поворотный механизм с опорой, дальномер, компьютер оператора комплекта, соединенный с дальномером, модулем спутниковых навигационных систем с антенной и каналом беспроводной связи, отличающийся тем, что комплект дополнительно оснащен электронным угломерным устройством, выполненным в виде блока, содержащего контроллер, который соединен с органами локального управления и индикации, трехосевыми датчиком угловой скорости, акселерометром и магнетометром с согласованными между собой осями чувствительности, датчиком температуры, двухканальным угломерным модулем спутниковых навигационных систем с возможностью подключения к каждому каналу отдельной выносной антенны с собственным средством установки, контроллер электронного угломерного устройства соединен информационно и по питанию с компьютером оператора комплекта, блок электронного угломерного устройства механически с помощью безлюфтовых разъемных соединений связан с дальномером и поворотным механизмом.
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2468338C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| US 9488492 B2, 08.11.2016 | |||
| WO 2011014481 A1, 03.02.2011. | |||

