Устройство относится к электронным схемам накопления и управления сигналами в радиолокации.
Характерной областью применения устройства являются системы грозолокации [1], [2], индицирующие координаты молниевых разрядов (МР), молниевых вспышек (MB) или гроз (под координатами гроз понимаются координаты центров гроз, определяемые путем усреднения координат всех MB, формирующих грозу. Координаты MB в свою очередь определяются путем усреднения координат всех МР, формирующих MB).
Протяженность грозы - величина случайная и лежит в пределах 5...60 км. Продолжительность грозы может достигать нескольких часов.
Время возникновения и местоположение МР, а следовательно, и MB в грозе также случайны. Количество MB за 100 с может достигать в сильной грозе 30 штук, в слабой грозе - до 2 шт. Известно [1 стр.40], что достоверность оценки координат грозы увеличивается при накоплении и усреднении данных грозопеленгатора-дальномера (ГПД) за несколько минут. Однако при использовании грозолокатора (ГЛ) на подвижном основании (на летательном аппарате (ЛА)) измеренные координаты грозы быстро приобретают большую погрешность из-за того, что ЛА перемещается в пространстве (а, следовательно, и относительно лоцируемой грозы) с большими линейными скоростями (до 1000 км/ч в гражданской авиации) и угловыми скоростями (при комфортном развороте до 1...2 Гр/с). Чтобы ограничить чрезмерное возрастание погрешности в грозолокаторах пилот ЛА после маневра вручную обнуляет индицируемые параметры отслеживаемых гроз.
Ручное обнуление является недостатком аналогов и исключено в последующих разработках бортовых грозолокаторов введением корректора координат, иногда называемого также стабилизатором азимутальной шкалы индикатора относительно курса. Корректировку осуществляют по данным датчиков бортовой инерциальной навигационной системы (ИНС), решая кинематические уравнения связи ЛА-MB (гроза).
В прототипе [3] - бортовом грозопеленгаторе-дальномере (БГПД) FM 11 осуществляют автоматическую коррекцию координат всех зарегистрированных MB, парирующую влияние перемещения ЛА.
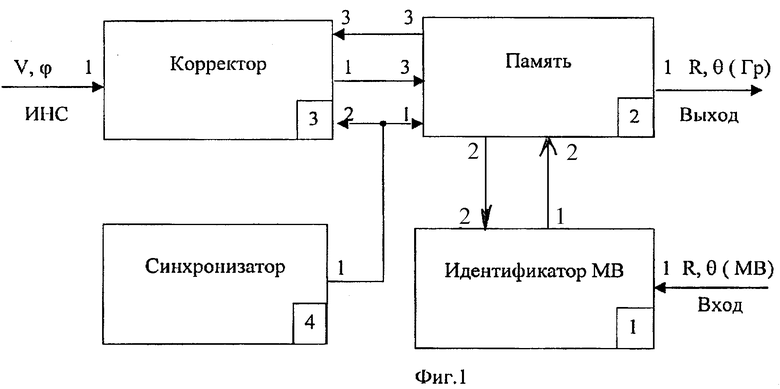
Прототип (фиг.1) содержит:
- идентификатор MB 1, на вход (1) которого поступают значения каждой вновь зарегистрированной молниевой вспышки, вход (2) соединен с выходом (2) памяти 2, а выход (1) соединен с входом (2) памяти 2;
- память 2, вход (3) которой соединен с выходом (1) корректора 3, вход (1) с выходом (1) синхронизатора 4 и входом (2) корректора 3, выход (1) соединен с входом потребителя информации (индикатор), выход (3) с входом (3) корректора 3;
- корректор 3, на вход (1) которого поступают сигналы скорости полета V и угла курса ϕ из инерциальной навигационной системы (ИНС), все остальные связи которого упомянуты выше;
- синхронизатор 4, все связи которого упомянуты выше.
Прототип работает следующим образом. На вход (1) идентификатора 1 поступают координаты зарегистрированной грозолокатором молниевой вспышки (MB). Идентификатор 1 инициирует выдачу из памяти 2 в идентификатор MB 1 хранимых в информационной матрице гроз (ИМГ) памяти 2 координат всех ранее обнаруженных и индицируемых гроз. Идентификатор MB 1 сравнивает их с координатами новой MB и по критерию близости в соответствии с теорией кластеров [4] определяет грозу, которой принадлежит зарегистрированная MB, вычисляет новые координаты этой грозы с учетом координат зарегистрированной MB и возвращает их в память 2. Если критерий близости не выполняется ни с одной грозой, координаты MB хранят в памяти 2 в качестве координат возможной первой MB новой грозы в течение времени tкр, отводимого на выполнение критерия обнаружения новой грозы [1 стр.35]. Назовем условно такие MB для краткости неустроенными.
Хранящиеся в памяти 2 (в ее информационной матрице гроз (ИМГ)) координаты гроз корректируются до нескольких раз в секунду, так как с тем же темпом корректируются с помощью корректора 3 координаты всех зарегистрированных MB, по которым рассчитываются координаты гроз. Учитывая высокую подвижность ЛА, только при таком достаточно большом темпе коррекции координат обеспечивается плавное, визуально сглаженное перемещение изображения грозы на экране индикатора. Выдача координат гроз потребителю (индикатор) осуществляют с частотой коррекции координат по общему сигналу синхроимпульсов коррекции и выдачи координат с выхода синхронизатора 4.
Многократное (сотни раз в секунду при большом количестве MB) решение формул кинематических связей ЛА-MB усложняет корректор 3 и является недостатком прототипа.
Задачей изобретения является упрощение корректора накопителя координат гроз при сохранении стабилизации азимутальной шкалы индикатора, учета собственной скорости ЛА и визуально комфортного изображения грозовой обстановки на экране индикатора.
Решение этой задачи достигают тем, что кинематические уравнения связи решают не для ЛА-MB, как в прототипе, а для ЛА - гроза. Это в десятки и даже сотни раз уменьшает объем вычислительной работы корректора, т.к. координаты грозы, как уже сказано выше, формируют путем усреднения координат всех зарегистрированных MB, хранящихся в памяти обычно несколько минут [1, стр.40] (в прототипе БГПД FM11 время памяти равно 256 с), а для сильных гроз количество MB может достигать за это время 100 и более штук в одной грозе. Хранимые в памяти накопленные координаты гроз необходимо периодически обнулять (как в прототипе обнуляют координаты MB). Обнуление нужно для устранения влияния накапливающихся ошибок за счет неучитываемых факторов, таких как нахождение гроз и ЛА в разных ветровых потоках (дальность обнаружения грозы достигает 400 км), наличие погрешностей датчиков скорости и маневра ЛА, наличие погрешностей вычислителя, многократно решающего кинематические уравнения связи, и т.п. Однако одномоментное обнуление координат грозы вызовет их скачок на индикаторе, так как процесс накопления после обнуления начинается с нуля, а погрешность вычисления координат грозы максимальна при малом числе зарегистрированных MB. Для устранения такого нежелательного скачка и обеспечения визуально комфортного изображения грозовой обстановки на экране индикатора вводят вторую память координат гроз, причем возможны два варианта ее использования. Выбор варианта зависит от того, предназначен ли грозолокатор для одновременной работы по малому количеству гроз (например, в узком угловом или дальностном секторе в северных широтах) или по большому количеству гроз (работа вкруговую в южных широтах).
В первом варианте вторая память является дополнительной, предварительно хранящей накапливаемые координаты гроз за время, равное половине полного времени памяти накопителя координат гроз. Первая память всегда подключена к входу потребителя (индикатору), поэтому основным элементом первой памяти является информационная матрица гроз (ИМГ). По аналогии основной элемент второй памяти можно назвать предварительной матрицей гроз (ПМГ). После обнуления первой памяти (т.е. обнуления ИМГ) в нее тут же перезаписывается содержимое ПМГ из второй памяти. Освободившаяся ПМГ начинает постепенно заполняться вновь формируемыми в идентификаторе MB 1 накапливаемыми координатами гроз, определяемыми по MB, зарегистрированными после обнуления ПМГ. Одновременно для каждой вновь зарегистрированной MB идентификатор MB 1 находит координаты ближайшей грозы из ИМГ и накапливает ее координаты в ИМГ. Так продолжается в течение времени, равного половине времени полного накопления (памяти) координат гроз, после чего по сигналу синхронизатора опять полностью обнуляется ИМГ в первой памяти и в нее переписывается содержимое ПМГ из второй памяти (которая при этом обнуляется). Таким образом, процесс накопления координат гроз в первой памяти не прерывается, а продолжается по всем грозам, координаты которых переписаны из ПМГ в ИМГ, а также по вновь регистрируемым грозам. Во второй же памяти (в ее ПМГ) процесс накопления опять начинается с нуля.
При работе одновременно по многим грозам процесс перезаписи содержимого второй памяти, хранимого в ПМГ, в ИМГ первой памяти достаточно громоздкий и может приводить к погрешностям и сбоям. Поэтому для грозолокаторов, предназначенных для работы по многим грозам, целесообразно ввести коммутатор выхода памяти, который осуществит переключение входа потребителя (индикатора) с выхода первой памяти на выход второй и обратно по синхроимпульсу их поочередного обнуления, поступающему из синхронизатора. Таким образом, потребитель (индикатор) поочередно работает по сигналам памяти, в которой всегда уже хранятся накопленные координаты гроз за время не менее половины полного такта переключения. При этом ИМГ в первой памяти и ПМГ во второй памяти выполняют одинаковые функции, так как каждая из них в первую половину своего такта после обнуления работает в режиме ПМГ, т.е. предварительного хранения накапливаемых координат гроз, т.е. не выдавая ничего потребителю (индикатору), а вторую половину своего такта обнуления работает в режиме ИМГ, выдавая уже хранящиеся и накапливаемые координаты гроз потребителю информации (индикатору).
Таким образом, решение поставленной задачи достигается при двух вариантах построения накопителя координат гроз, связанных единым изобретательским замыслом, причем второй вариант предпочтительнее в случае, если грозолокатор предназначен для наблюдения большого количества гроз одновременно.
На чертежах представлены:
фиг.1 - схема прототипа;
фиг.2 - схема накопителя координат гроз. Вариант 1;
фиг.3 - схема накопителя координат гроз. Вариант 2;
фиг.4 - диаграммы организации хранения, обнуления и выдачи потребителю (индикатор) координат гроз.
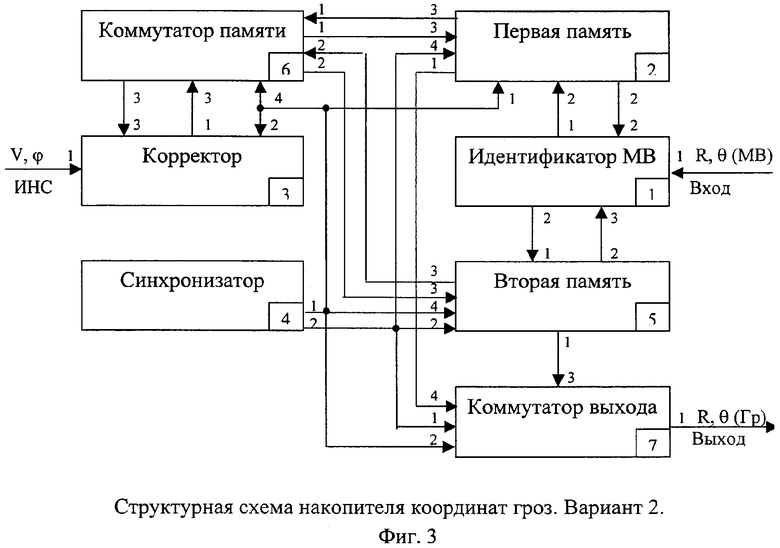
В первом варианте - фиг.2 - накопитель координат гроз содержит идентификатор MB 1, первую память 2, корректор 3, синхронизатор 4, вторую память 5 и коммутатор памяти 6.
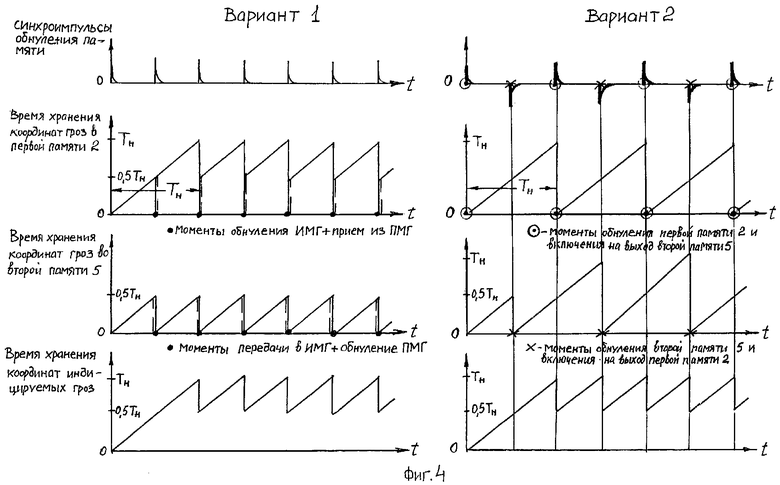
В варианте 2 (фиг.3) накопитель координат гроз содержит идентификатор MB 1, первую память 2, корректор 3, синхронизатор 4, вторую память 5, коммутатор памяти 6 и коммутатор выхода 7.
С учетом связей накопитель координат гроз (вариант 1) содержит:
- идентификатор MB 1, на вход (1) которого поступают значения координат каждой вновь зарегистрированной грозолокатором молниевой вспышки, вход (2) которого соединен с выходом (2) первой памяти 2, вход (3) - с выходом (1) второй памяти 5, выход (1) идентификатора MB 1 соединен с входом (2) первой памяти 2, выход (2) соединен с входом (1) второй памяти 5;
- первую память 2, вход (4) которой соединен с выходом (2) синхронизатора 4 и входом (2) второй памяти 5, вход (3) с выходом (1) коммутатора памяти 6, вход (1) с выходом (1) синхронизатора 4, а также с входом (3) коммутатора памяти 6, входом (2) корректора 3 и входом (4) второй памяти 5, вход (5) с выходом (3) второй памяти 5, выход (1) с входом потребителя информации (индикатор), выход (3) с входом (1) коммутатора памяти 6;
- корректор 3, на вход (1) которого поступают сигналы скорости полета V и угла курса ϕ из инерциальной навигационной системы (ИНС), вход (3) корректора 3 соединен е выходом (3) коммутатора памяти 6, выход (1) с входом (4) коммутатора памяти 6;
- синхронизатор 4, все связи которого уже упомянуты выше;
- вторую память 5, вход (3) которой соединен с выходом (2) коммутатора памяти 6, выход (2) с входом (2) коммутатора памяти 6;
- коммутатор памяти 6, все связи которого уже упомянуты выше.
Аналогично накопитель координат гроз (вариант 2) содержит:
- идентификатор МВ 1, на вход (1) которого поступают значения координат каждой вновь зарегистрированной грозолокатором молниевой вспышки, вход (2) которого соединен с выходом (2) первой памяти 2, вход (3) - с выходом (2) второй памяти 5, выход (1) идентификатора MB 1 соединен с входом (2) первой памяти 2, выход (2) соединен с входом (1) второй памяти 5;
- первую память 2, вход (4) которой соединен с выходом (2) синхронизатора 4, входом (2) второй памяти 5 и входом (1) коммутатора выхода 7, вход (3) соединен с выходом (1) коммутатора памяти 6, вход (1) с выходом (1) синхронизатора 4, а также с входами (4) коммутатора памяти 6, входом (4) второй памяти 5, входом (2) коммутатора выхода 7 и входом (2) корректора 3, выход (1) с входом (4) коммутатора выхода 7, выход (3) с входом (1) коммутатора памяти 6;
- корректор 3, на вход (1) которого поступают сигналы скорости полета V и угла курса ϕ из инерциальной навигационной системы (ИНС), вход (3) корректора 3 соединен с выходом (3) коммутатора памяти 6, выход (1) с входом (3) коммутатора памяти 6;
- синхронизатор 4, все связи которого уже упомянуты выше;
- вторую память 5, вход (3) которой соединен с выходом (2) коммутатора памяти 6, выход (3) с входом (2) коммутатора памяти 6, выход (1) с входом (3) коммутатора выхода 7;
- коммутатор памяти 6, все связи которого уже упомянуты выше;
- коммутатор выхода 7, выход (1) которого соединен с входом потребителя информации (индикатор), а все остальные связи уже упомянуты выше.
Заявляемое устройство (вариант 1) работает следующим образом.
На вход (1) идентификатора MB 1 поступают координаты - дальность R и пеленг θ зарегистрированной грозолокатором молниевой вспышки R, θ (MB). Идентификатор MB 1 инициирует выдачу из первой памяти 2 и второй памяти 5 содержимого ИМГ и ПМГ соответственно, сравнивает координаты MB с координатами уже зарегистрированных гроз (Гр), вызываемых из памяти при появлении MB; по критерию близости координат MB и Гр, определяет грозу, которой принадлежит зарегистрированная MB, и вычисляет новые координаты этой грозы с учетом координат зарегистрированной MB. Вычисленные новые координаты грозы возвращают в первую память 2 и вторую память 5. Если установленный критерий близости не выполняется ни с одной из зарегистрированных гроз, MB считается неустроенной, ее координаты хранят во второй памяти 5 в качестве возможной первой MB новой грозы, так как одна MB - это еще не гроза, а, возможно, помеха. Координаты неустроенной MB хранят в течение времени tкр, отводимого на выполнение критерия обнаружения новой грозы, в качестве которого обычно [1, стр.35] используется регистрация не менее двух MB за время (tкр).
Хранящиеся в первой памяти 2 и во второй памяти 5 координаты гроз (и неустроенных MB) корректируют в корректоре 3 координат гроз (ККГ), для чего в корректор 3 поступают также параметры полета ЛА (скорость V и угол курса ϕ) из инерциальной навигационной системы (ИНС) ЛА. Корректировка осуществляется достаточно часто (до единиц герц) и осуществляется по сигналам с выхода (1) синхронизатора 4 (синхроимпульсы коррекции).
Массивы координат гроз обнуляются через определенное время (tобн), равное половине времени памяти накопителя координат гроз (tпам) по сигналу с выхода (2) синхронизатора 4 (синхроимпульс обнуления). В качестве времени памяти накопителя координат гроз удобно принять время выполнения критерия обнаружения грозы (tкр). После обнуления координат гроз в ИМГ первой памяти 2 в освободившуюся память переносят из второй памяти 5 с выхода (3) с обнулением по тому же сигналу синхронизации координаты гроз массива ПМГ. Не переносятся и не обнуляются координаты только неустроенных MB. Они обнуляются через такт, т.к. необходимо время tкр для их проверки по критерию обнаружения новой грозы в случае регистрации новой MB. Если критерий будет выполнен, эта пара MB формирует координаты новой грозы, которая из идентификатора MB 1 (выход (2)) тут же записывается в массив ПМГ второй памяти 5 (вход (1)) и в массив ИМГ (вход (2)) первой памяти 2 через выход (1) идентификатора MB 1.
Таким образом, после обнуления первой памяти 2 ее ИМГ продолжает накапливать координаты массива гроз, полученного из массива ПМГ второй памяти 5, и через выход (1) выдает координаты гроз R, θ (Гр) потребителю (на индикатор), что осуществляется с частотой коррекции по сигналу с выхода (1) синхронизатора 4, который поступает на вход (1) первой памяти 2, а вторая память 5 начинает накапливать координаты всех гроз с нуля. Это означает, что каждая первая (после обнуления ПМГ) MB каждой грозы, индицируемой по выходу (1) первой памяти 2, регистрируется во второй памяти 5 как неустроенная, затем регистрируются новые MB, формирующие с неустроенными MB координаты гроз, которые индицируют по выходу первой памяти 2, или новые. Если какая-либо зарегистрированная и индицируемая гроза из массива ИМГ первой памяти 2 не обретет подтверждения во второй памяти 5 своего существования за время полного такта обнуления, т.е. к ней за это время не будет приписана ни одна новая MB, при очередном обнулении ее координаты будут обнулены как в ИМГ (первая память 2), так и в ПМГ (вторая память 5) и она исчезнет с экрана индикатора - гроза окончилась.
В варианте 2 периодическое обнуление первой памяти 2 и второй памяти 5 осуществляют не одновременно, а попеременно, для чего синхроимпульсы обнуления с выхода (2) синхронизатора 4 попеременно меняют полярность - первая память 2 вход (2) обнуляется импульсами одной полярности, а вторая память 5 вход (2) - импульсами противоположной полярности. Сигнал R, θ (Гр) на вход потребителя (индикатор) поступает с выхода (1) коммутатора выхода 7, который поочередно подключает выход той памяти, которая предыдущим синхроимпульсом не обнулялась.
Диаграммы организации хранения, обнуления и выдачи потребителю (индикатор) координат гроз, приведенные на фиг.4, дополнительно поясняют и иллюстрируют работу схем памяти в вариантах 1 и 2. Из диаграмм видно, что в обоих вариантах обе памяти обнуляются синхроимпульсами, но в варианте 1 практически одновременно, а в варианте 2 поочередно со сдвигом на период синхроимпульсов обнуления. В варианте 1 первая память сразу после обнуления получает в свою информационную матрицу гроз (ИМГ) всю информацию, т.е. координаты всех гроз, содержащиеся во второй памяти, в ее предварительной матрице гроз (ПМГ). Передача сопровождается обнулением ПМГ. Следовательно, ИМГ сначала обнуляется и тут же получает массив накопленных координат гроз из ПМГ, а ПМГ сначала передает массив накопленных координат гроз в ИМГ и только после этого обнуляется, т.е. осуществляется передача информации с обнулением ячеек памяти. Качество индицируемой информации в обоих вариантах одинаковое.
Накопитель координат гроз целесообразно выполнять с использованием цифровой техники на базе серийно выпускаемых отечественной промышленностью и широко используемых элементов памяти, логики, сравнения, времеров (русский вариант слова timer) и т.д. В любом варианте использование накопителя координат гроз упрощает, удешевляет грозолокатор, повышает его надежность.
Список литературы
1. Гальперин С.М. и др. Грозопеленгатор-дальномер «Очаг-2П». Л.: Гидрометеоиздат, 1988.
2. Бару Н.В., Кононов И.И., Соломоник М.Е. Радиопеленгаторы-дальномеры ближних гроз. Л.: Гидрометеоиздат, 1976.
3. Бортовой грозопеленгатор-дальномер. Эскизно-технический проект. М.: ОАО «Фазотрон - НИИР», 1999. Стр.276...303.
4. Макуренков А.Ф., Гуськов Ю. Н. Формирование границ турбулентно-грозовой зоны опасности полета по информации самолетного грозопеленгатора-дальномера и метеоРЛС. Вопросы радиоэлектроники. Серия: Общие вопросы радиоэлектроники. Выпуск 1, 1994. Стр.6, 7.
5. Бакленева З.М. Кластерная модель грозового очага. Атмосферное электричество. Труды II Всесоюзного симпозиума, Ленинград, 1982. Л.: Гидрометеоиздат, - 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМАЛЬНОГО ОБХОДА ГРОЗЫ | 2005 |
|
RU2316023C2 |
| БОРТОВОЙ ГРОЗОПЕЛЕНГАТОР-ДАЛЬНОМЕР | 2000 |
|
RU2200963C2 |
| СОВМЕЩЕННАЯ ВСТРОЕННАЯ СИСТЕМА КОНТРОЛЯ И ЕЕ ВАРИАНТ | 2004 |
|
RU2277716C1 |
| Устройство для регистрации грозовой деятельности | 1989 |
|
SU1597817A2 |
| Пассивный однопунктный грозолокатор | 1984 |
|
SU1306337A1 |
| Устройство для регистрации грозовой деятельности | 1987 |
|
SU1509788A2 |
| Регистратор спектра | 1986 |
|
SU1387037A1 |
| СПОСОБ И УСТРОЙСТВО ВИБРОДИАГНОСТИКИ РОТОРНЫХ МЕХАНИЗМОВ | 1999 |
|
RU2153660C1 |
| Однопунктная система местоопределения гроз в ближней зоне | 1978 |
|
SU720384A1 |
| СПОСОБ ТЕЛЕНАВЕДЕНИЯ РАКЕТЫ ПО ЛУЧУ И СИСТЕМА ТЕЛЕНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2258888C1 |
Изобретение относится к электронным схемам накопления и применяется в системах грозолокации. Технический результат заключается в упрощении корректора накопителя координат гроз. Для этого кинематические уравнения связи решают не для летательного аппарата-молниевых вспышек, а для летательного аппарата-грозы, а поскольку координаты грозы формируют путем усреднения координат всех зарегистрированных молниевых вспышек за несколько минут, то объем вычислительной работы уменьшается в десятки раз. 2 н.п. ф-лы, 4 ил.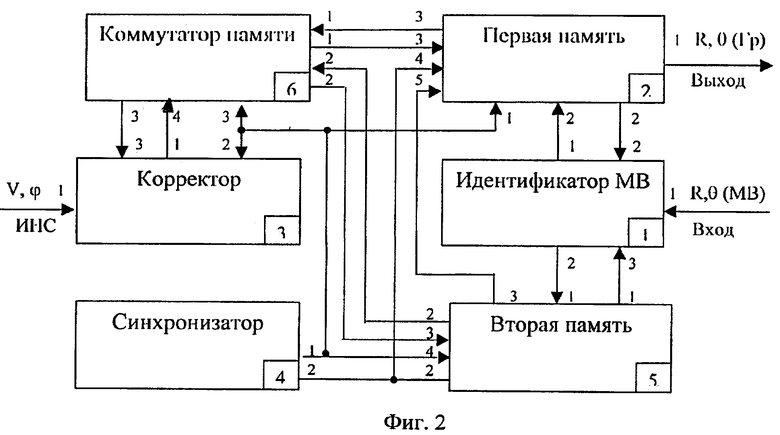
идентификатор молниевой вспышки (MB), на первый вход которого поступают координаты зарегистрированной грозолокатором MB, предназначенный для сравнения координат MB с координатами уже зарегистрированных гроз, вызываемых из памяти, для определения грозы, которой принадлежит зарегистрированная MB, по критерию близости координат MB и грозы и для вычисления новых координат этой грозы с учетом координат зарегистрированной MB;
первую память, предназначенную для накопления координат гроз, первый выход которой соединен с индикатором;
корректор координат гроз, на первый вход которого поступают параметры летательного аппарата: скорость, угол курса;
синхронизатор, первый выход которого соединен с первым входом первой памяти и вторым входом корректора,
причем второй вход идентификатора соединен с вторым выходом первой памяти, первый выход идентификатора соединен с вторым входом первой памяти для передачи вычисленных координат гроз, отличающийся тем, что введены
вторая память, предназначенная для накопления координат гроз;
коммутатор памяти,
причем третий вход идентификатора соединен с первым выходом второй памяти, второй выход идентификатора соединен с первым входом второй памяти для передачи координат гроз в память, третий выход первой памяти соединен с первым входом коммутатора памяти, первый выход которого соединен с третьим входом первой памяти, второй выход синхронизатора, предназначенный для обнуления памятей, подключен ко второму входу второй памяти и четвертому входу первой памяти, третий вход второй памяти подключен ко второму выходу коммутатора памяти, второй вход которого подключен ко второму выходу второй памяти, первый выход синхронизатора подключен к четвертому входу второй памяти и третьему входу коммутатора памяти, третий выход которого подключен к третьему входу корректора, первый выход которого подключен к четвертому входу коммутатора памяти, третий выход второй памяти подключен к пятому входу первой памяти.
идентификатор молниевой вспышки (MB), на первый вход которого поступают координаты зарегистрированной грозолокатором MB, предназначенный для сравнения координат MB с координатами уже зарегистрированных гроз, вызываемых из памяти, для определения грозы, которой принадлежит зарегистрированная MB по критерию близости координат MB и грозы, и для вычисления новых координат этой грозы, которой принадлежит зарегистрированная MB, а если установленный критерий не выполняется ни с одной зарегистрированной грозой, то MB считается неустроенной и ее координаты хранят в памяти в течение времени, отводимого на регистрацию не менее двух MB за это время;
первую память, предназначенную для накопления координат гроз;
корректор координат гроз, предназначенный для корректировки координат гроз, чтобы парировать влияние перемещения летательного аппарата, на первый вход которого поступают параметры летательного аппарата: скорость, угол курса;
синхронизатор, первый выход которого соединен с первым входом первой памяти и вторым входом корректора,
причем второй вход идентификатора соединен с вторым выходом первой памяти, первый выход идентификатора соединен с вторым входом первой памяти для передачи вычисленных координат гроз, отличающийся тем, что введены
вторая память, предназначенная для накопления координат гроз;
коммутатор памяти;
коммутатор выхода, предназначенный для поочередного подключения входа индикатора к первому выходу первой памяти и первому выходу второй памяти по синхроимпульсу их поочередного обнуления,
причем третий вход идентификатора соединен с вторым выходом второй памяти для приема координат гроз, второй выход идентификатора соединен с первым входом второй памяти для передачи координат гроз в память, третий выход первой памяти соединен с первым входом коммутатора памяти, первый выход которого соединен с третьим входом первой памяти, второй выход синхронизатора, предназначенный для обнуления памяти, подключен ко второму входу второй памяти, четвертому входу первой памяти и к первому входу коммутатора выхода, третий вход второй памяти подключен ко второму выходу коммутатора памяти, а первый выход синхронизатора подключен к второму входу коммутатора выхода и четвертому входу второй памяти, первый выход которой подключен к третьему входу коммутатора выхода, четвертый вход которого подключен к первому выходу первой памяти, а первый выход которого подключен к индикатору, третий выход второй памяти подключен ко второму входу коммутатора памяти, первый выход корректора соединен с третьим входом коммутатора памяти, третий выход которого соединен с третьим входом корректора, первый выход синхронизатора соединен с четвертым входом коммутатора памяти.
| US 5202690, 13.04.1993 | |||
| US 5198819, 30.03.1993 | |||
| US 6441773, 27.08.2002 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 2003001770 A1, 02.01.2003 | |||
| US 2003006928 A1, 09.01.2003 | |||
| US 2002004692 A1, 10.01.2002 | |||
| ГАЛЬПЕРИН С.М | |||
| и др., Грозопеленгатор-дальномер "Очаг-2П", Ленинград: Гидрометеоиздат, 1976 | |||
| БАРУ Н.В., КОНОНОВ И.И., СОЛОМОНИК М.Е., | |||

