Способ оптимального обхода грозы относится к области авиационной метеорадиолокации и может использоваться в грозолокаторах (ГЛ), грозопеленгаторах-дальномерах (ГПД), устанавливаемых на борту летательных аппаратов (ЛА), морских судов и других объектов.
Грозолокаторы определяют координаты (текущая дальность - R до 400 км и более, текущий пеленг - θ до ±180°) отдельных молниевых разрядов (МР), усредняя которые за время молниевой вспышки (MB), называемой молнией, не превышающее 1...1,5 с, получают координаты молнии. Усреднение координат молний позволяет определить координаты центра грозы [Бару Н.В. и др. Радиопеленгаторы-дальномеры ближних гроз. Л.: Гидрометеоиздат, 1976].
Размер грозы (ее линейная протяженность в горизонтальной плоскости - L) определяется областью пространства с высокой электрической активностью атмосферы, в пределах которой возникают молниевые разряды. Размер грозы является величиной случайной, зависящей от многих факторов, в частности от географической широты, геологической структуры местности, времени года, гидрометеорологического состояния атмосферы, фазы развития грозы. Известна вероятностная зависимость P(L) повторяемости горизонтальных размеров грозовых очагов [стр.59 Степаненко В.Д. и др. Радиотехнические методы исследования гроз. Л.: Гидрометеоиздат, 1983], представленная на фиг.1. Измеренный размер (протяженность) грозы является также функцией погрешности измерения (σ).
Известные грозолокаторы (аналоги) индицируют координаты зарегистрированных молниевых разрядов, молний [Strike Finder. Digital Weather Avoidance. Insight Avionics, 1990] или центров гроз [Honeywell, Inc. LSS Lightning Sensor System. Member of Gama. General Aviation Manufacturers Association. December 1989. Printed in U.S.A.]. Однако грозолокаторы-аналоги обладают недостатком, заключающимся в том, что выбор пилотом безопасного и кратчайшего пути обхода грозы в них невозможен, никак не регламентируется, так как границы грозы не определяются, гроза не оконтуривается и самым обобщенным символом грозы является изображение ее центра. Все это приводит к нежелательным ошибочным оценкам пилотом молниевой опасности на выбранном им пути обхода грозы.
Недостаток ГЛ-аналогов частично устранен в бортовом грозопеленгаторе-дальномере (БГПД) [А.Ф.Макуренков, Ю.Н.Гуськов. Способ формирования сигналов грозовой опасности. Патент № 2100824 от 27 декабря 1997 г.с приоритетом от 10 января 1996 г., Бюл. № 36], который выбран в качестве наиболее близкого к заявке аналога-прототипа. Проблема оконтуривания грозы решена в прототипе формированием и индицированием границы грозовой (молниевой) и турбулентно-грозовой зон (ГЗ и ТГЗ соответственно) в виде окружностей вокруг центра грозы, причем радиусы этих окружностей выбирают при конструировании ГЛ равными постоянным величинам. Выбор окружности в качестве формы молниевой зоны обусловлен отсутствием преимущественных направлений появления молний относительно центра грозы. Обход грозы рекомендуется осуществлять по контуру, т.е. по границе молниевой зоны (rгз) или по границе большей по размерам турбулентно-грозовой зоны (rтгз), учитывающей наличие турбулентности вокруг молниевой зоны.
Недостатком прототипа является то, что при фактической возможной протяженности гроз от Lmin=10 км до Lmax=70 км протяженность индицируемой грозовой (молниевой) зоны априори выбрана равной постоянной величине - моде (М) зависимости P(L) (2rгз=М=35 км), т.е. не учитывается ее реальный размер.
Задачей предлагаемого способа оптимального обхода грозы является обеспечение формирования кратчайшего и безопасного пути обхода, исключающего попадание ЛА на этапе обхода грозы в область непосредственного воздействия возможных молний с вероятностью выше допустимой (р), заданной при проектировании грозолокатора. Выполнение этого критерия оптимального обхода грозы обеспечивают тем, что принимают и обрабатывают сигналы молниевых разрядов, вычисляют координаты молний, идентифицируют их по принадлежности к определенной грозе, вычисляют текущие координаты центров гроз с учетом движения и маневров летательного аппарата, осуществляют связь с бортом и индицируют информацию, вычисляют радиус молниевой зоны, обнаруживают опорные молнии и определяют радиусы их зон, отсчитывают время от момента обнаружения каждой опорной молнии, вычисляют приращение погрешности измерения координат молний, формируют непрерывно индицируемый радиус молниевой зоны при сближении ЛА и грозы, вычисляют: радиус маневра разворота, требуемое время начала маневра разворота, требуемую его продолжительность, момент времени его окончания, соответствующий моменту начала обхода грозы, величину угла крена при обходе грозы, окончание обхода грозы, устранение при необходимости получившегося при обходе грозы линейного смещения штатной траектории полета, причем радиус индицируемой молниевой зоны, по границе которой осуществляют обход грозы, формируют с учетом координат всех принадлежащих рассматриваемой грозе, т.е. идентифицированных, молний, которые наблюдались за время от обнаружения грозы до начала ее обхода. Формирование непрерывно индицируемой молниевой зоны грозы осуществляют по определенному правилу.
Для удовлетворения указанного критерия оптимальности обхода грозы необходимо выполнить четыре условия:
1) учесть все идентифицированные молнии, т.е. обнаруженные грозолокатором и отнесенные им по определенному критерию к наблюдаемой грозе. Это - условие полноты используемой статистики молний наблюдаемой грозы. Оно накладывает ограничения на минимальный радиус молниевой зоны, который не должен быть меньше величины, обеспечивающей учет всех без исключения идентифицированных молний, принадлежащих данному грозовому очагу;
2) исключить искажения используемой статистики идентифицированных молний соседними или дальними грозами. Это условие требует учитывать только идентифицированные молнии, т.е. накладывает ограничение на максимальный размер радиуса индицируемой текущей молниевой зоны, который не должен превышать величины, включающей в себя половину максимальной возможной протяженности грозового очага плюс погрешность измерения вектора дальности молнии σ(Rм):

где (Lmax/2)=35 км;
ri - измеряемый радиус молниевой зоны;
3) минимизировать путь обхода грозы при сохранении заданной безопасности ее обхода, т.е. при условии, что радиус молниевой зоны, по границе которой осуществляют обход, не должен быть меньше величины, при которой очередная молния может оказаться за границей молниевой зоны с вероятностью, превышающей допустимую (заданную). Это является условием безопасной минимизации пути обхода грозы;
4) обеспечить выполнение в совместной взаимосвязи предыдущих трех условий оптимальности обхода грозы.
Выполнение четырех условий оптимальности способа обхода грозы обеспечивается при непрерывном вычислении по определенным правилам границы индицируемой, т.е. текущей, молниевой зоны, начиная с момента обнаружения грозы, и при следовании ЛА по рекомендуемой границе при обходе грозы.
Способ оптимального обхода грозы состоит из шести этапов полета (фиг.2).
Этап I - штатный полет по курсу Ψ, обнаружение и сближение с грозой, в процессе которого осуществляют по определенному правилу набор и обработку статистики по молниям и непрерывное формирование радиуса индицируемой текущей молниевой зоны. Этот этап заканчивается в точке А, соответствующей времени начала маневра (tнм) ЛА с углом крена γp.Этап I содержит операции 1...6 (фиг.4):
- грозолокации;
- вычисления радиуса i-й молниевой зоны ri;
- обнаружения опорной молнии и определения радиуса ее зоны (rо);
- отсчета времени (t);
- вычисления приращения погрешности (Δσ(R));
- формирования радиуса текущей молниевой зоны (rт).
Этап II - маневр, обеспечивающий своевременный сход со штатной траектории полета ЛА и, путем его плавного разворота с углом крена γр на рассчитанный угол (α), выход на траекторию обхода грозы. Этап II начинается в точке А в момент времени (tнм) и оканчивается в точке В в момент времени (tом), соответствующий началу обхода грозы (tно) с углом крена γo. Этап II содержит операции 7...9 (фиг.4):
- вычисления радиуса маневра разворота (rр);
- вычисления требуемой дальности и начала маневра (Rнм);
- вычисления времени маневра и его окончания Δм.
Этап III - обход грозы начинается в точке В в момент времени (tно), когда угол крена ЛА меняет свой знак и устанавливается равным значению угла крена при обходе грозы γо. Обход грозы заканчивается в точке С в момент времени (too), когда курс ЛА (ψ) становится равным его штатному значению в момент начала маневра. В момент (too) гроза переходит в заднюю полусферу ЛА, и угол крена ЛА устанавливают равным нулю. Этап III содержит операции 10, 11 (фиг.4):
- вычисления угла крена при обходе грозы (γо);
- вычисления момента окончания обхода грозы (Δψ(t)=0).
Этап IV - полет ЛА по траектории, смещенной на величину Δ относительно штатной траектории полета (до начала маневра).
Этап V - стандартный S-образный маневр ЛА для устранения смещения Δ траектории (при необходимости).
Этап VI - полет ЛА по несмещенной траектории.
На фигурах 1...4 представлено следующее:
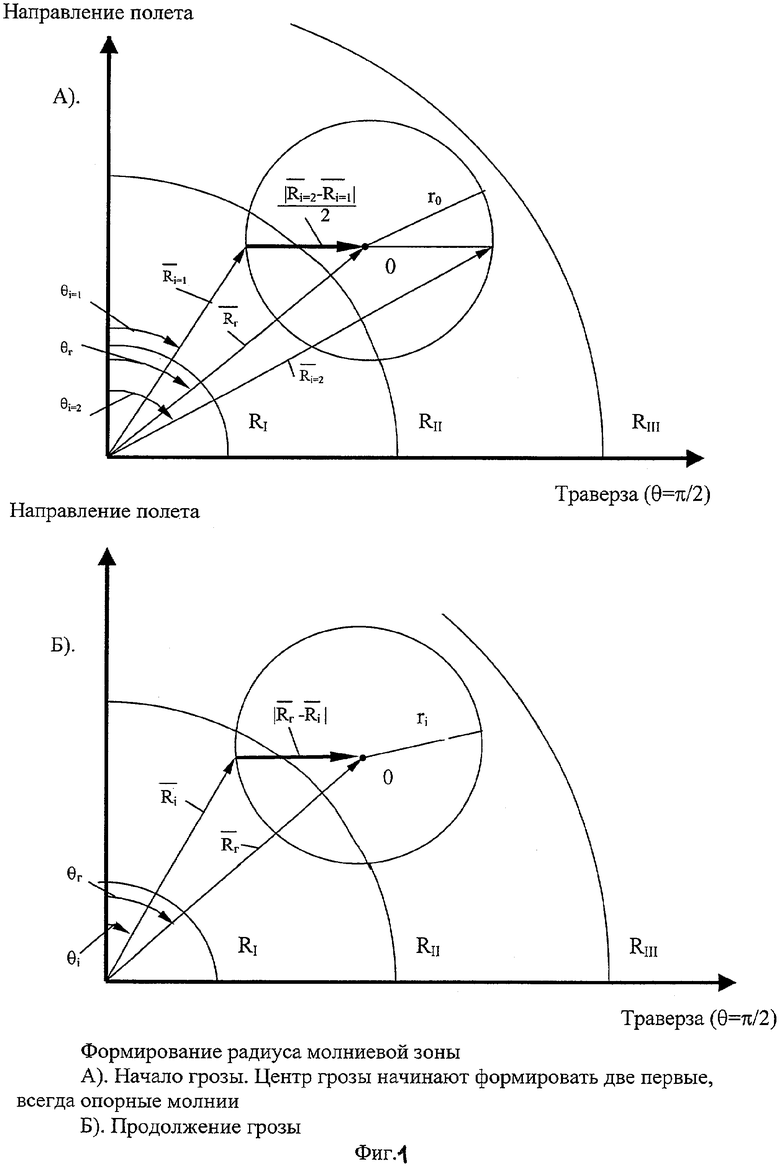
фиг.1А иллюстрирует процесс начала грозы, ее обнаружение по первым двум молниям при интервалах времени и расстояния между ними, не превышающих заранее заданных величин, соответствующих критерию обнаружения грозы;
фиг.1Б иллюстрирует процесс после формирования центра грозы.
Обозначения к фиг.1:
 - вектор дальности первой молнии (θi=1 - ее угол пеленга);
- вектор дальности первой молнии (θi=1 - ее угол пеленга);
 - вектор дальности второй молнии (θi=2 - ее угол пеленга);
- вектор дальности второй молнии (θi=2 - ее угол пеленга);
 - вектор центра грозы;
- вектор центра грозы;
rо - радиус первой опорной молниевой зоны, равный половине модуля разности векторов первых двух молний;
ri - радиус текущей i-й молниевой зоны;
RI, II, III - шкалы расстояний;
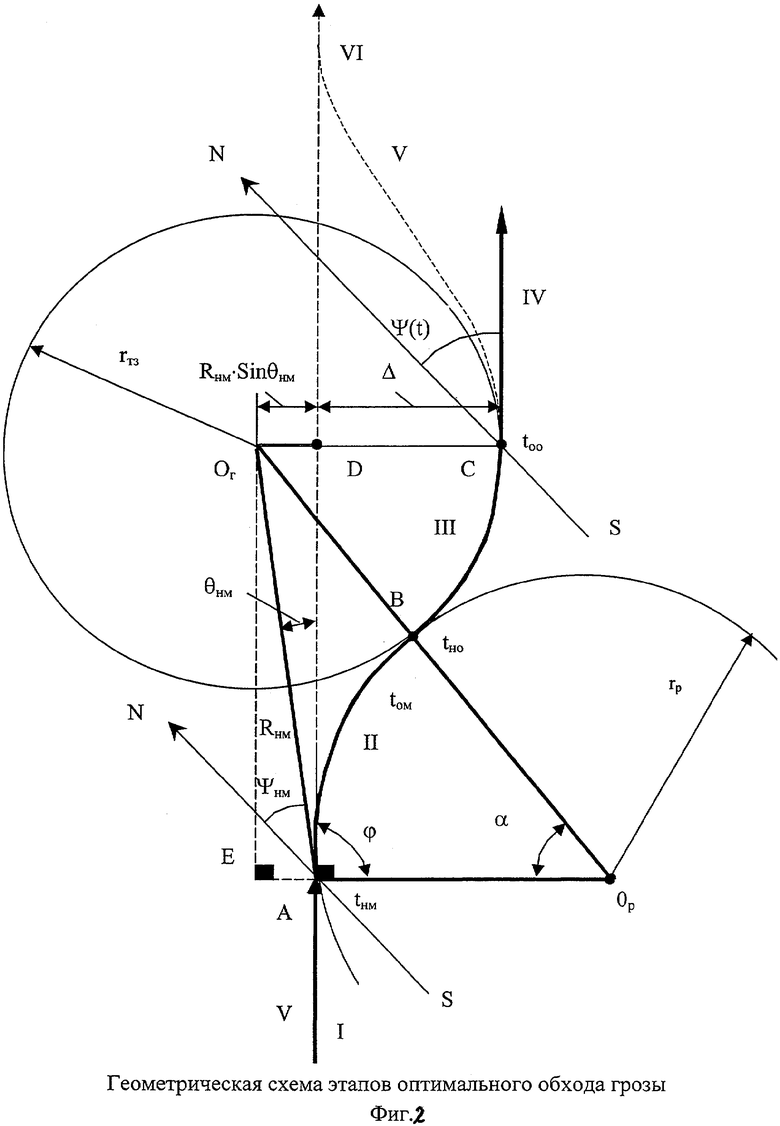
фиг.2 - геометрическая схема этапов оптимального обхода грозы, где
V - вектор скорости полета ЛА;
Ог - центр грозы;
Ор - центр разворота;
SN - линия отсчета текущего курса полета ψ(t);
tнм - время начала маневра;
tом - время окончания маневра;
tно=tом - время начала обхода грозы;
too - время окончания обхода грозы;
Rнм - расстояние до центра грозы в начале маневра;
θнм - угол пеленга центра грозы в начале маневра;
rтз - текущий радиус грозы, запомненный на начало маневра разворота ЛА;
ψнм - курс полета ЛА в момент начала маневра;
rр - радиус маневра разворота ЛА;
α - угол разворота ЛА, обеспечивающий выход ЛА на траекторию обхода грозы в точке В;
EOгDA - параллелограмм (для определения геометрических связей).
Остальные обозначения фиг.2 приведены в описании этапов способа оптимального обхода грозы;
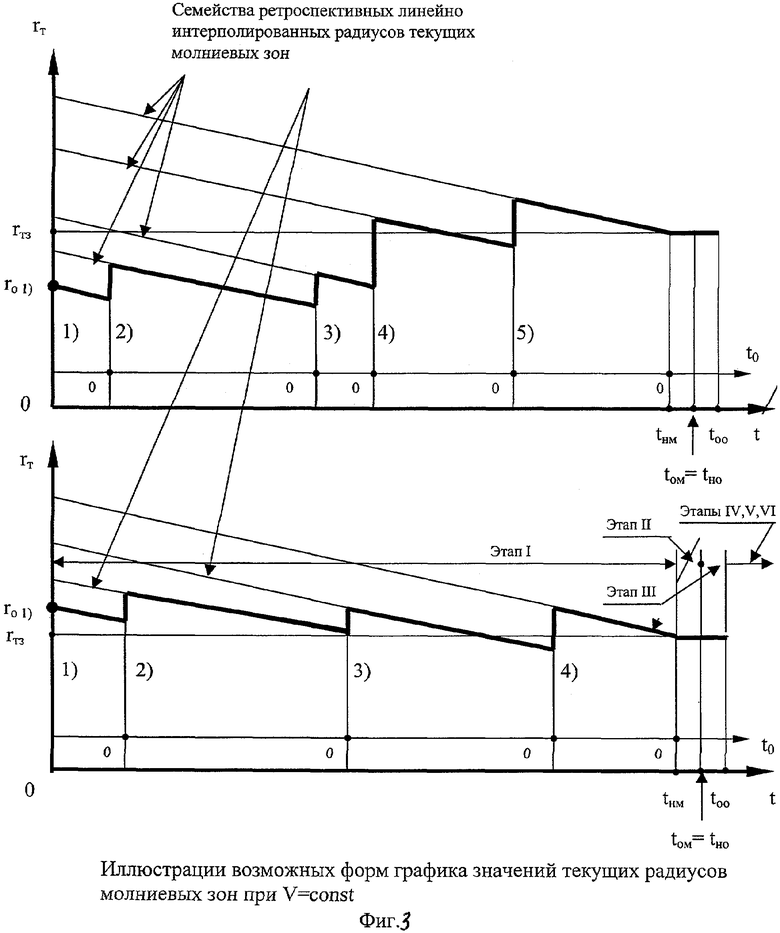
фиг.3 - иллюстрации возможных форм графика значений текущих радиусов молниевых зон, где
1), 2)... - номера опорных молний;
rо1) -радиус первой опорной молнии;
t=0 - время обнаружения грозы;
to=0 - начало отсчета времени после обнаружения очередной опорной молнии;
rт - радиус текущей молниевой зоны;
tнм - время начала маневра ЛА;
tом=tно - время окончания маневра ЛА и начала обхода грозы;
too - время окончания обхода грозы;
rтз - радиус запомненного в момент начала маневра текущего радиуса грозы;
фиг.4 - схема выполнения способа оптимального обхода грозы.
С учетом связей способ оптимального обхода грозы обеспечивают следующие узлы для выполнения операций:
- грозолокатор 1, первый и второй выходы которого соединены соответственно с первым и вторым входами узла вычисления радиуса i-й молниевой зоны ri 2, второй выход дополнительно соединен с вторым входом для операции вычисления требуемой дальности и начала маневра Rнм 8, третий выход соединен с вторым входом узла вычисления момента окончания обхода грозы Δψ(t) 11, четвертый выход соединен с первым входом узла вычисления радиуса маневра разворота rр 7, с вторыми входами узлов вычисления приращения погрешности Δσ(R) 5 и вычисления угла крена при обходе грозы γо 10, первый вход грозолокатора соединен с первыми входами узлов вычисления требуемой дальности и начала маневра Rнм 8 и вычисления угла крена при обходе грозы γо 10, с вторым входом узла обнаружения опорных молний и определения радиуса ее зоны rо 3, с первым выходом формирования радиуса текущей молниевой зоны rт 6, второй вход грозолокатора 1 соединен с первым выходом узла вычисления угла крена при обходе грозы γо 10, третий вход соединен с первым выходом узла вычисления момента окончания обхода грозы Δψ(t)=0 11, четвертый вход соединен с первым входом узла вычисления момента окончания обхода грозы Δψ(t)=0 11, с вторыми входами узлов вычисления времени маневра и его окончания Δм 9 и отсчета времени t 4, с третьим входом узла формирования радиуса текущей молниевой зоны rт 6, а также с первым выходом узла вычисления требуемой дальности и начала маневра Rнм 8, пятый вход соединен с первым выходом узла вычисления радиуса маневра разворота rр 7 и с третьим входом узла вычисления требуемой дальности и начала маневра Rнм 8, шестой вход соединен с первым выходом узла вычисления времени маневра и его окончания Δм 9 и третьим входом узла вычисления угла крена при обходе грозы γо 10;
- узел 2 вычисления радиуса i-й молниевой зоны ri, первый выход которого соединен с первым входом узла обнаружения опорных молний и определения радиусов их зон rо 3;
- узел 3 обнаружения опорных молний и определение радиусов их зон rо, первый выход которого соединен с первым входом узла отсчета времени t 4, второй выход которого соединен с вторым входом узла формирования радиуса текущей молниевой зоны rт 6;
- узел 4 отсчета времени t, первый выход которого соединен с первыми входами узлов вычисления приращения погрешности Δσ(R) 5 и вычисления времени маневра и его окончания Δм 9;
- узел 5 вычисления приращения погрешности Δσ(R), первый выход которого соединен с первым входом узла формирования радиуса текущей молниевой зоны rт 6;
- узел 6 формирования радиуса текущей молниевой зоны rт, все связи которого упомянуты выше;
- узел 7 вычисления радиуса маневра разворота rр, все связи которого упомянуты выше;
- узел 8 вычисления требуемой дальности и начала маневра Rнм, все связи которого упомянуты выше;
- узел 9 вычисления времени маневра и его окончания Δм, все связи которого упомянуты выше;
- узел 10 вычисления угла крена при обходе грозы γо, все связи которого упомянуты выше;
- узел 11 вычисления момента окончания обхода грозы Δψ(t)=0, все связи которого упомянуты выше.
Реализация способа оптимального обхода грозы осуществляется следующим образом.
Из грозолокатора 1 для вычисления радиуса i-й молниевой зоны ri (2) выдают значения дальности и пеленга, т.е. векторы грозы и i-й идентифицированной молнии, вычисляют по ним расстояние между векторами по формуле:  .
.
Вычисленный в узле 2 радиус i-й молниевой зоны ri сравнивают в узле 3 с сформированным в узле 6 радиусом текущей молниевой зоны rт и если он его превышает, то ri считают радиусом опорной молниевой зоны rо, а молнию - обнаруженной опорной молнией, т.е.:

При обнаружении опорной молнии запускают в узле 4 отсчет времени t, время используют в узле 5 при вычислении приращения погрешности Δσ(R) по формуле

где К=σб/Rб - постоянная грозолокатора, определяющая крутизну изменения погрешности измерения координат молнии от расстояния до нее;
V - текущая скорость полета летательного аппарата, которую выдают через грозолокатор 1 одновременно и для вычислений радиуса маневра разворота rр 7 и угла крена при обходе грозы γо 10.
Вычисленное в узле 5 значение приращения погрешности Δσ(R) вычитают в узле 6 из радиуса последней опорной молниевой зоны rо, определенного в узле 3, формируя таким образом радиус текущей молниевой зоны rт в узле 6 при сближении летательного аппарата с грозой по формуле:

Значение радиуса текущей молниевой зоны rт передают для обнаружения опорной молнии и радиуса ее зоны rо из узла 3, а также для вычисления требуемой дальности и начала маневра Rнм в узле 8, формирования зоны и ее индицирования в грозолокаторе 1 и для вычисления угла крена γо в узле 10 при обходе грозы.
Вычисляют в узле 7 радиус маневра разворота rр (используя кроме скорости полета V из грозолокатора 1 значения двух хранящихся в долговременной памяти постоянных: гравитационной постоянной Земли g=9,81 м/c2 и допустимый при развороте коэффициент поперечной перегрузки или соответствующий ему тангенс угла крена γо) по формуле:

Значение вычисленного в узле 7 радиуса разворота rр передают в грозолокатор 1 для формирования индицируемой окружности маневра разворота как рекомендуемой траектории полета ЛА и для вычисления требуемой дальности начала маневра разворота Rнм в узле 8 по формуле:

Это равенство выполняется только при условии Rг=Rнм, θг=θнм, rт=rтз, т.е. в точке А (фиг.2), которая является точкой начала маневра разворота ЛА.
При выполнении условия начала маневра по сигналу из узла 8 осуществляют следующее: запоминают текущее значение курса штатного полета ψ(t)=ψнм в узле 11, выдают сигнал в грозолокатор 1 для инициации ручного управления маневром разворота с углом крена γр для выхода на траекторию обхода грозы, перезапускают отсчет времени t в узле 4, благодаря чему начинают отсчет фактического времени маневра разворота tмф, запоминают, "замораживают" радиус текущей молниевой зоны rтз:=rт.
Вычисление требуемого времени маневра (tмр=tом-tнм) осуществляют, найдя предварительно угол разворота (α) по известным двум сторонам (rр и Rнм) и углу между ними (π/2+θнм) (фиг.2) по формуле:

а затем уже и требуемое на маневр разворота время:

где θнм, rтз - пеленг и радиус молниевой зоны в момент начала маневра.
Условием окончания маневра является равенство фактического времени маневра tмф рассчитанной требуемой его продолжительности tмр:

Сигналом об окончании маневра Δм из узла 9 запускают вычисление угла крена γ0 при обходе грозы в узле 10, которое осуществляют по известному текущему значению скорости полета V, получаемому из грозолокатора 1, известному радиусу обхода грозы, которым является «замороженный» на момент начала маневра текущий радиус молниевой зоны rтз, получаемый при формировании радиуса текущей молниевой зоны rт в узле 6. Угол крена γ0 вычисляют по формуле:

Рассчитанное значение угла крена передают из узла 10 в грозолокатор 1, обеспечивающий связь с бортом и индицирование. Как следует из формулы (10) величину поперечной перегрузки пилот устанавливает, управляя скоростью полета. Режим полета с углом крена при обходе грозы γ0, вычисленным в узле 10, продолжают до тех пор, пока не будет зафиксирован момент окончания обхода грозы Δψ(t)=0 в узле 11 при выполнении условия:

При окончании обхода грозы из узла 11 выдают сигнал на индикатор грозолокатора 1, угол крена пилот устанавливает равным нулю и ЛА начнет двигаться прежним штатным курсом, но по траектории, смещенной на величину Δкм, определяемую по формуле (см. фиг.2):

При необходимости устранить указанное смещение и следовать по прежней траектории необходимо выполнить стандартный S-образный маневр [7, стр.64, Белкин A.M. и др. Воздушная навигация. Справочник. М.: Транспорт, 1988].
Применение указанного способа в авиации или на судах не представляет трудностей, так как все операции не выходят за пределы решения логических, алгебраических и тригонометрических зависимостей и легко реализуются в цифровых процессорах, а ПНК, обеспечивающие решение задачи автоматического пилотирования, устанавливаются на все современные магистральные самолеты и некоторые типы вертолетов [7, стр.35, Белкин A.M. и др. Воздушная навигация. Справочник. М.: Транспорт, 1988].
Изобретение представляет собой способ оптимального обхода грозы, обеспечивающий формирование индицируемой текущей молниевой зоны таким образом, что обход зоны грозы по ее границе является самым коротким, т.е. наиболее экономичным и в то же время безопасным, с вероятностью попадания в опасную молниевую зону не выше наперед заданной величины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ОБХОДА ЛЕТАТЕЛЬНЫМ АППАРАТОМ ЗОН ГРОЗОВОЙ ДЕЯТЕЛЬНОСТИ И ЛИВНЕВЫХ ОСАДКОВ | 2023 |
|
RU2798628C1 |
| БОРТОВОЙ ГРОЗОПЕЛЕНГАТОР-ДАЛЬНОМЕР | 2000 |
|
RU2200963C2 |
| НАКОПИТЕЛЬ КООРДИНАТ ГРОЗ И ЕГО ВАРИАНТ | 2003 |
|
RU2269792C9 |
| СПОСОБ АДАПТИВНО-МАРШРУТНОГО УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2568161C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ГРОЗОВОЙ ОПАСНОСТИ | 1996 |
|
RU2100824C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВЫХОДЕ НА ЛИНИЮ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2003 |
|
RU2240589C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВОЗВРАТЕ НА КОРАБЛЬ | 2011 |
|
RU2450312C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОЛНИЕВОГО РАЗРЯДА И МНОГОПУНКТОВАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2253133C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ АДАПТИВНАЯ СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ ЭКИПАЖЕМ ЛЕТАТЕЛЬНОГО АППАРАТА РЕШЕНИЙ ПО ОБХОДУ ОЧАГОВ ГРОЗОВОЙ ДЕЯТЕЛЬНОСТИ | 2023 |
|
RU2798629C1 |
Изобретение относится к области авиационной метеорадиолокации. Способ оптимального обхода грозы обеспечивает кратчайший рекомендуемый индицируемый путь обхода грозы при обеспечении вероятности попасть в область непосредственного воздействия возможных молний на этапе обхода грозы не выше допустимой, заранее заданной. Критерий оптимальности может быть использован и при желании избежать попадания в области высокой околомолниевой турбулентности. Достигаемым техническим результатом является возможность исключения попадания летательного аппарата в область непосредственного воздействия молний. 4 ил.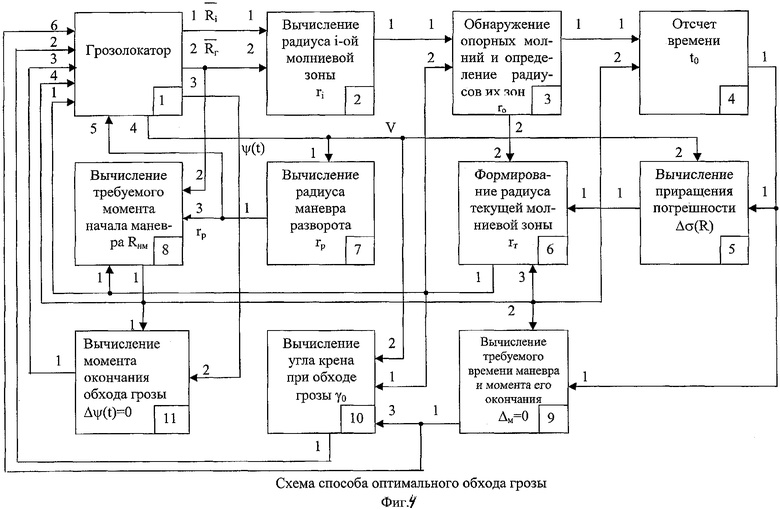
Способ оптимального обхода грозы, содержащий операцию грозолокации с использованием грозолокатора, устанавливаемого на борту летательного аппарата (ЛА), включающую в себя прием и обработку сигналов молниевых разрядов, вычисление по ним координат молний, идентификацию их принадлежности к определенной грозе, вычисление текущих координат центров гроз с учетом движения и маневров летательного аппарата, связь с бортом для получения параметров скорости V и курса ψ(t) ЛА, индицирование информации, необходимой для пилотирования ЛА при обходе грозы, отличающийся тем, что радиус текущей молниевой зоны, то есть радиус грозы rт в процессе сближения летательного аппарата с грозой формируют таким образом, чтобы к началу обхода грозы по границе этой зоны за все предыдущее время сближения с грозой ни одна идентифицированная молния не наблюдалась за пределами границы ретроспективно интерполированной этой молниевой зоны и не менее одной молнии находилось на ее границе, которая является кратчайшим путем обхода грозы при безопасности, определяемой количественно вероятностью попадания летательного аппарата во время обхода грозы в околомолниевое пространство не выше априори заданной величины, для чего введены операции:
вычисление радиуса i-ой молниевой зоны гi как расстояния между векторами центра грозы  и очередной i-ой идентифицированной молнии
и очередной i-ой идентифицированной молнии  , выдаваемых с выхода грозолокатора, по формуле
, выдаваемых с выхода грозолокатора, по формуле
обнаружение опорных молний и определение радиуса их зон ro, причем за опорную молнию принимают идентифицированную молнию по условию превышения радиусом ее молниевой зоны ro радиуса текущей молниевой зоны rт, который рассчитывают для интервалов времени между опорными молниями;
отсчет времени to от момента обнаружения каждой опорной молнии, а также отсчет фактического времени маневра разворота ЛА tмф;
вычисление приращения погрешности Δσ(R) измерения координат молний, уменьшающегося при сближении координат, по формуле
Δσ(R)=K·V·t,
где R - дальность до молнии, К - постоянная грозолокатора, которую определяют априори как отношение погрешности измерения координат молнии к дальности, которой соответствует эта погрешность измерения, и хранят в постоянной памяти, скорость V получают с выхода грозолокатора, а время t из узла отсчета времени;
формирование текущего радиуса молниевой зоны rт при сближении ЛА и грозы как разности между радиусом опорной молниевой зоны и приращением погрешности, получаемым с выхода узла операции вычисления приращения погрешности Δσ(R), по формуле
rт=rо-K·V·to,
вычисление радиуса маневра разворота rр с учетом хранящихся в долговременной памяти константы g=9,81 м/с2 и априори заданного для подобного маневра максимального значения комфортной поперечной перегрузки или соответствующего ей угла крена γр, с учетом скорости V по формуле
rp=V2/g·tgγp,
вычисление требуемого времени начала маневра разворота, для чего из грозолокатора получают значение периодически корректируемых текущих координат вектора грозы  , из предыдущих операций получают рассчитанный радиус маневра разворота rр и сформированный радиус текущей молниевой зоны rт, а момент начала маневра разворота определяют как момент решения уравнения
, из предыдущих операций получают рассчитанный радиус маневра разворота rр и сформированный радиус текущей молниевой зоны rт, а момент начала маневра разворота определяют как момент решения уравнения

и в этот момент выдают сигналы на запоминание значения текущего угла курса ψнм, на запоминание значения текущего радиуса грозы rтз на начало отсчета фактического времени маневра разворота tмф, на расчет требуемой продолжительности маневра tмр, а также в грозолокатор для индицирования начала маневра разворота и его инициирования;
вычисление требуемой продолжительности времени маневра разворота tмр с учетом дальности до центра грозы в момент начала маневра Rнм по формуле

где угол разворота α рассчитывают по формуле

где θнм, rтз - соответственно текущие пеленг грозы и текущий запомненный радиус грозы в момент начала маневра разворота;
окончание маневра разворота при условии равенства требуемого расчетного tмр и фактического времени разворота tрф, т.е. в момент времени
Δм=tмр-tрф=0,
и выдача сигнала для расчета угла крена γ0 при обходе грозы;
вычисление величины угла крена при обходе грозы по границе текущей запомненной молниевой зоны, для чего используют из долговременной памяти гравитационную постоянную g=9,81 и скорость V из грозолокатора, осуществляют по формуле
γ0=arctg(V2/g·rтз),
и выдают в грозолокатор для индицирования, установления и поддержания угла крена γ0 на все время обхода грозы;
окончание обхода грозы и установление нулевого угла крена γ0=0 при достижении текущим значением курса полета ψ(t), получаемым из грозолокатора, значения курса полета, запомненного на момент начала маневра разворота ψнм, т.е. при выполнении условия
Δψ(t)=ψ/(t)-ψнм=0,
и выдача соответствующего сигнала в грозолокатор для обнуления угла крена, т.е. для вывода ЛА в режим полета с курсом, равным курсу штатного полета до маневра и обхода грозы;
устранение, при необходимости, получившегося при обходе грозы линейного смещения на величину Δ штатной траектории полета, для чего совершают стандартный S-образный разворот таким образом, чтобы
Δ=rтз-Rнм·Sinθнм=0.
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ГРОЗОВОЙ ОПАСНОСТИ | 1996 |
|
RU2100824C1 |
| БОРТОВОЙ ГРОЗОПЕЛЕНГАТОР-ДАЛЬНОМЕР | 2000 |
|
RU2200963C2 |
| Пассивный однопунктный грозолокатор | 1984 |
|
SU1306337A1 |
| US 2003001770 A1, 02.01.2003 | |||
| US 5202690 A, 13.04.1993 | |||
| US 6061013 A, 09.05.2005. | |||

