Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, в которых применяются лучевые системы теленаведения.
В лучевых системах теленаведения формируют пространственную структуру электромагнитного поля управления, создаваемую передающим устройством с пункта управления, при этом параметры поля управления функционально связаны с координатами соответствующих точек [1], например, в системе декартовых координат "Z0Y", где "Z" - величина координаты по курсу, "Y" - величина координаты по тангажу, "0" - начало координаты, совпадающее с центром поля управления и являющееся точкой прицеливания (наведения). Формирование поля управления осуществляют сканированием диаграммы направленности электромагнитного излучения в двух взаимно перпендикулярных направлениях (по "Y" и "Z" соответственно), при этом пропорционально углу сканирования изменяют величину команд. Таким образом, в плоскости "Z0Y" поле имеет по краям единичные (с разными знаками соответственно) значения команд, а в центре - нулевое. Бортовая аппаратура, расположенная на ракете, измеряет параметры электромагнитного поля и определяет свое положение относительно "0".
Известен способ теленаведения ракеты по лучу ракеты [1], который заключается в том, что вводят ракету в зону радиолуча, после чего управляют системой теленаведения, при котором на ракете измеряют параметр электромагнитного поля и определяют ее положение относительно пункта управления, т.е. ее координаты относительно точки прицеливания.
Известна система наведения ракеты, использующая радиолинию с времяимпульсной модуляцией поднесущего сигнала и амплитудной модуляцией несущего (ВИМ-АМ) [1], содержащая пункт управления (передающий тракт), а на ракете - приемник, выход которого соединен со входом аппаратуры разделения каналов (последовательно включенные формирующий каскад и дешифраторы), выходы которой поканально подключены к аппаратуре декодирования по курсу и тангажу (последовательно включенные в каждом канале триггер и фильтр низких частот).
В этой известной командной системе наведения ракеты на цель аппаратура декодирования выполняет функцию преобразования время-напряжения, в которой фильтр низких частот - память, при этом она может применяться по своему прямому назначению в лучевой системе теленаведения, например при сканировании диаграммы направленности антенны поочередно по курсу и тангажу, в соответствии с которым формируют на пункте управления два командных сигнала Uкс1 и Uкс2.
Поскольку ракета в лучевой системе теленаведения измеряет параметр электромагнитного поля (изменяемый по закону ВИМ-АМ или, например, ВИМ) и определяет по нему свое положение относительно точки прицеливания, т.е. свои координаты по курсу "Z" и тангажу "Y", то даже при кратковременном прерывании (экранировании) этого электромагнитного поля ракета становится неуправляемой и может быть потеряна.
Прерывание электромагнитного поля (линии связи) особенно актуально для оптической линии связи при полете ракеты на малой высоте параллельно поверхности, например для противотанковых управляемых реактивных снарядов (ПТУРС) при артиллерийском обстреле, когда вверх поднимаются массы грунта и пыли.
В известных способе теленаведения ракеты по лучу и системе теленаведения по лучу при прерывании линии связи формируются сигналы координат Uk1 и Uк2, несоответствующие действительному положению ракеты относительно цели, что приводит к потере ракеты, например, из-за залипания триггеров в одном из двух положений величина координаты будет иметь максимальное значение одного или другого знака.
Таким образом, в реальных условиях применения известных способа и системы теленаведения ракеты в луче имеет место временное перекрытие (прерывание) линии связи, связывающей пункт управления с управляемой ракетой, при котором ракета может выйти из луча (поля управления) и стать неуправляемой.
Следовательно, недостатком прототипа (способа и устройства) является снижение точности наведения ракеты.
Задачей настоящего изобретения (способа и устройства) является повышение точности наведения ракеты за счет исключения ложной команды управления при прерывании линии связи.
Поставленная задача решается за счет того, что в способе теленаведения ракеты по лучу вводят ракету в зону луча, измеряют на ракете ее координаты относительно точки прицеливания, а затем вырабатывают управляющие сигналы, дополнительно на ракете задают величину времени, в течение которого запоминают последние значения координат по курсу и тангажу при прерывании линии связи, обнуляют значения координат при времени запоминания, большем заданной величины, и выставляют измеренные значения координат при появлении сигналов теленаведения с момента восстановления линии связи.
Система теленаведения ракеты по лучу, реализующая способ, содержит на ракете последовательно соединенные приемник и блок разделения каналов по курсу и тангажу, выходы которого поканально подключены к одной из двух цепочек, состоящей из преобразователя время-код и блока памяти соответственно по курсу и тангажу, в каждой цепочке вход записи блока памяти подключен к первому выходу преобразователя время-код, а информационный вход - ко второму выходу преобразователя время-код, при этом пункт управления связан со входом приемника; введен блок контроля величины времени запоминания, выполненный в виде логической схемы «ИЛИ», счетчика импульсов, RS-триггера и синхронизатора, при этом выход логической схемы «ИЛИ» соединен со входом обнуления счетчика импульсов и первым входом RS-триггера, второй вход которого подключен к выходу счетчика импульсов, счетный вход которого соединен с выходом синхронизатора, причем выход RS-триггера подключен ко входам обнуления блоков памяти каналов курса и тангажа, а первый и второй входы логической схемы «ИЛИ» соединены с первыми выходами преобразователей время-код соответственно по курсу и тангажу.
Заявленный способ реализуется следующим образом. На стартовом участке, т.е. на участке выведения ракеты на траекторию полета, обеспечивают ввод ракеты в зону луча (в поле управления), сформированного пунктом управления. После ввода ракеты в зону луча она управляется системой теленаведения, при котором на ракете измеряют ее координаты по курсу и тангажу (соответствующие им электрические сигналы) относительно точки прицеливания, с которой совпадает центр поля управления, а затем вырабатывают управляющие сигналы.
При прерывании линии связи на ракете начинают отсчет времени отсутствия связи ракеты с пунктом управления, в течение которого запоминают последние значения координат по курсу и тангажу. Величину отсчета времени (отрезок времени) задают. При превышении прерывания линии связи заданного значения времени, т.е. при времени запоминания последних значений координат по курсу и тангажу, большем заданной величины, значения координат на ракете обнуляют. С момента восстановления линии связи при появлении на ракете сигналов теленаведения выставляют вновь измеренные значения координат по курсу и тангажу (независимо хранятся ли запомненные последние значения координат или они обнулены).
Отсчет заданной величины времени запоминания начинают при пропадании сигналов теленаведения, например с момента пропадания командных сообщений по курсу или тангажу или обоих.
Конкретную величину времени запоминания задают, исходя из параметров конкретной системы теленаведения в луче, например определяемых размерами поля управления, максимальной угловой скоростью отслеживания цели, скоростью полета ракеты и т.д., при котором стремятся максимально долго сохранить траекторию полета ракеты (при отсутствии сигналов наведения) вдоль прямой линии, связывающей пункт управления с целью.
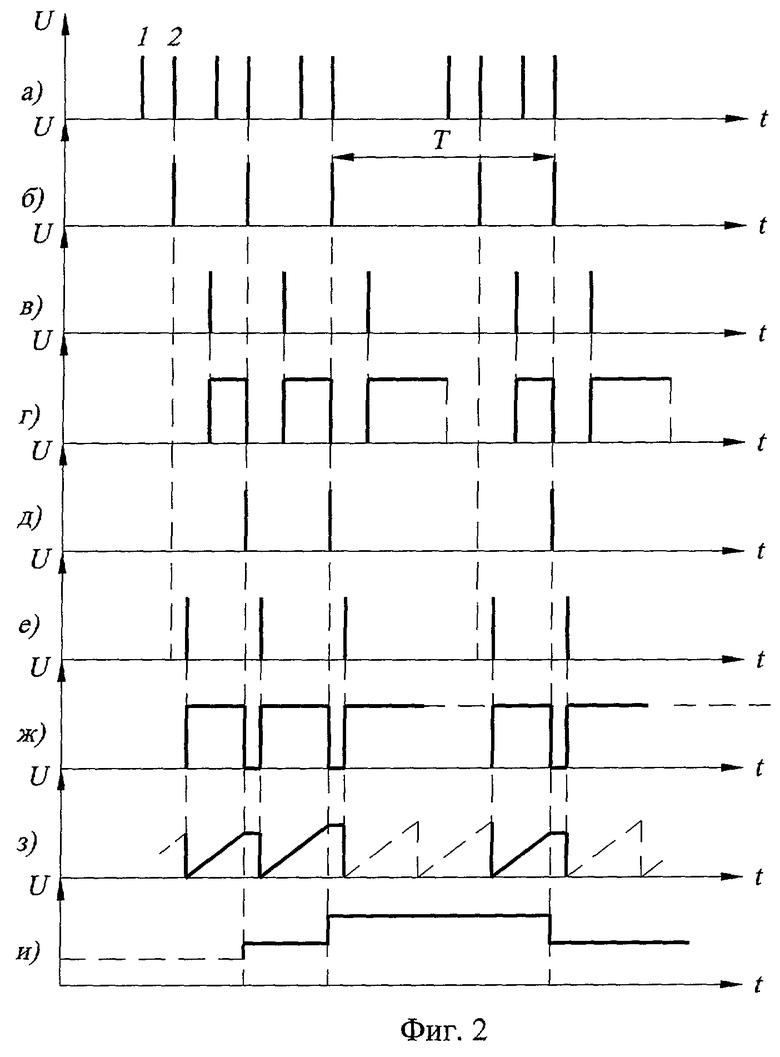
Предлагаемое изобретение поясняется чертежами (фиг.1 и 2). На фиг.1 приведена структурная электрическая схема системы теленаведения ракеты по лучу, где представлены: 1 - ракета, 2 - приемник, 3 - пункт управления, 4 - блок разделения каналов по курсу и тангажу, 5а и 5б - первый и второй преобразователи время-код, 6а, 6б, 6в и 6г - логические схемы «И», 7а и 7б - схемы задержки, 8а и 86 - схемы установки в исходное состояние, 9 - регистр сдвига, 10а, 10б и 10в - RS-триггеры, 11 - блок контроля величины времени запоминания, 12а, 12б и 12в - логические схемы «ИЛИ», 13а и 13б - блоки памяти соответственно по курсу и тангажу, 14а, 14б и 14в- счетчики импульсов, 15а, 15б и 15в - синхронизаторы.
На фиг.2 приведены эпюры сигналов, где представлены: а - сигнал на выходе приемника 2, б - сигнал на выходе логической схемы «И» 6а, в - сигнал на выходе схемы задержки 76, г - сигнал на выходе RS-триггера 10а, д - сигнал на выходе логической схемы «И» 6в, е - сигнал на выходе схемы задержки 7а, ж - сигнал на выходе RS-триггера 10б, з - сигнал на выходе счетчика импульсов (в аналоговом виде) 14в, и - сигнал на выходе блока памяти 13а.
Система теленаведения ракеты по лучу содержит на ракете 1 последовательно соединенные приемник 2 и блок разделения каналов по курсу "Z" и тангажу "Y" 4, выходы которого поканально подключены к одной из двух цепочек, состоящей из преобразователя время-код 5а или 5б и блока памяти 13а или 13б соответственно по курсу "Z" или тангажу "Y". В каждой цепочке вход записи (вход "С") блока памяти 13а или 13б подключен к первому выходу преобразователя время-код соответственно 5а и 5б, а информационный вход (вход "D") - ко второму входу преобразователя время-код. Пункт управления 3 связан (электромагнитным излучением) со входом приемника 2. Блок контроля величины времени запоминания 11 выполнен в виде логической схемы «ИЛИ» 12в, счетчика импульсов 14а, RS-триггера 10в и синхронизатора 15в. Выход логической схемы «ИЛИ» 12в соединен со входом обнуления (вход "R") счетчика импульсов 14а и первым входом (вход "R") RS-триггера 10в, второй вход (вход "S") которого подключен к выходу счетчика импульсов 14а, счетный вход (вход "С") которого соединен с выходом синхронизатора 15в. Выход RS-триггера 10в подключен ко входам обнуления (входы "R") блоков памяти каналов курса 13а и тангажа 13б. Первый и второй входы логической схемы «ИЛИ» 12в соединены с первыми выходами преобразователей время-код соответственно по курсу "Z" 5а и тангажу "Y" 5б.
Приемник 2 может быть выполнен, например, как в прототипе. Пункт управления 3 может быть выполнен как передающее устройство, которое осуществляет поочередное сканирование луча в двух взаимно перпендикулярных направлениях по курсу и тангажу, при этом пропорционально углу сканирования изменяют параметры электромагнитного поля, например, по закону ВИМ с дополнительной AM несущего колебания или без нее.
Примеры выполнения аппаратуры разделения каналов 4 и преобразователя время-код в каналах курса "Z" 5а и тангажа "Y" 5б приведены на фиг.1, при этом преобразователь время-код 5а идентичен преобразователю 5б, при этом код - это величина напряжения в цифровом виде. Блоки памяти 13а и 13б могут быть выполнены на регистрах, например микросхеме 564ИР6.
Логические схемы «И» 6а, 6б, 6в и 6г - двухвходовые логические схемы «И». Схемы задержки 7а и 7б, например два последовательно включенных ждущих мультивибратора. Схемы установки в исходное состояние 8а и 8б могут быть выполнены, например, как дифференцирующие цепочки. Регистр сдвига 9, например микросхема 564ИР2. RS-триггеры 10а, 10б и 10в, например микросхема 564ТМ2. Логические схемы «ИЛИ» 12а, 12б и 12в - двухвходовые логические схемы «ИЛИ». Счетчики импульсов 14а, 14б и 14в - микросхемы, например 564ИЕ10. Синхронизаторы 15а, 15б и 15в - кварцованные автогенераторы импульсов, которые могут быть выполнены в виде одного автогенератора. Поскольку схемы 12в, 14а, 10в и 15в выполняют функцию блока контроля величины времени, то эти схемы приведены на фиг.1 в виде блока 11.
Заявленная система теленаведения ракеты по лучу работает следующим образом. В первоначальный момент времени, при выходе бортового источника питания на рабочий режим, схемами установки в исходное состояние 8а и 8б формируются разовые импульсы. Схема 8б устанавливает по входу "R" все разряды сдвигового регистра 9 в аппаратуре разделения каналов 4 в нулевое исходное состояние. Схема 8а в преобразователе время-код 5а через логическую схему «ИЛИ» 12б по входу "R" RS-триггера 10б устанавливает на его выходе нулевой логический уровень, который запрещает прохождение импульсов с выхода синхронизатора 15б через логическую схему «И» 6г на счетный вход (вход "С") счетчика импульсов 14в.
С момента появления напряжения питания на ракете 1 и до момента попадания ее в поле управления, т.е. до момента появления первого импульса на выходе логической схемы «И» 6а, на входе "R" счетчика импульсов 14б логический нуль. Счетчик импульсов 14б находится в произвольном исходном состоянии и производит счет импульсов по входу "С" с синхронизатора 15б. При появлении единичного логического уровня на выходе счетчика импульсов 14б он через логическую схему «ИЛИ» 12а выставляет по входу "R" RS-триггера 10а на его выходе нулевой логический уровень.
Пункт управления 3 формирует поле управления, например ВИМ сигнал в виде пар импульсов. Временное расстояние между парами этих импульсов - величина команды, а в паре - признак принадлежности команды каналам тангажа или курса (эпюра а на фиг.2). При сканировании изменяют величину расстояния между парами импульсов (командное сообщение), а при изменении направления сканирования на перпендикулярное изменяют величину временного расстояния в каждой паре, т.е. при сканировании по "Z" величина временного интервала будет иметь одно значение, а по "Y" - другое. Дополнительно этот сигнал можно подвергнуть, например, AM.
При попадании ракеты 1 в поле управления приемник 2 преобразует электромагнитное излучение с пункта управления 3 в электрические импульсы (эпюра а на фиг.2), которые поступают на вход блока разделения каналов по курсу и тангажу 4. В блоке 4, как отмечалось выше, установлены нулевые логические уровни на всех выходах (разрядах) сдвигового регистра 9. При появлении импульсов с выхода приемника 2 на информационном ("D") входе сдвигового регистра 9 они начинают сдвигаться импульсами с синхронизатора 15а, поступающими на вход "С".
Таким образом, сдвиговый регистр 9 выполняет функцию линии задержки, при этом величину задержки импульсов на первом и втором выходах регистра сдвига 9 относительно входного (на входе "D") выбирают равной временному интервалу между первым и вторым импульсами в парах соответственно в канале курса "Z" и тангажа "Y". Эти задержанные и незадержанные импульсы поступают на первый и второй входы соответственно первой 6а и второй 66 логической схемы «И», на выходе которых формируются импульсы (эпюра б на фиг.2). Временное расстояние между импульсами определяет величину командных сообщений по курсу "Z" и тангажу "Y" соответственно.
Командные сообщения по курсу "Z" и тангажу "Y" с выходов блока разделения каналов 4 поступают на входы соответственно первого 5а и второго 56 преобразователей время-код. При появлении первого импульса с выхода Z' блока разделения каналов по курсу и тангажу 4 (эпюра б на фиг.2) схема задержки 7б формирует задержку этого импульса во времени на величину, меньшую минимального временного интервала между вторыми импульсами из пар (эпюра в на фиг.2). Этот задержанный импульс поступает далее на "S" вход RS-триггера 10а и устанавливает на его выходе единичный логический уровень (эпюра г на фиг.2). Этот уровень поступает на вход логической схемы «И» 6в и разрешает прохождение второго импульса (эпюра б на фиг.2) на выход логической схемы «И» 6в (эпюра д на фиг.2). При этом импульс с выхода логической схемы «И» 6в через логическую схему «ИЛИ» 12а по входу "R" устанавливает на выходе RS-триггера 10а нулевой логический уровень (эпюра г на фиг.2) до момента прихода следующего импульса (эпюра в на фиг.2), после чего процесс повторяется вновь.
Одновременно импульсы с выхода Z' блока разделения каналов по курсу и тангажу 4 поступают на вторую схему задержки 7а, задерживающую импульсы во времени (эпюра е на фиг.2), которые обнуляют по входу "R" счетчик импульсов 14в (эпюра з на фиг.2), выставляют по "S" входу на выходе второго RS-триггера 10б единичный логический уровень (эпюра ж на фиг.2), который разрешает прохождение импульсов с синхронизатора 15б на выход логической схемы «И» 6г, а значит, и на счетный вход (вход "С") счетчика импульсов 14в. Счетчик импульсов 14в начинает считать в двоичном параллельном коде длительность импульсов, приведенных на эпюре ж (фиг.2). Как следует (из эпюры ж), расстояние между импульсами (нулевой логический уровень) соответствует времени хранения двоичного числа, соответствующего величине координаты "Z" в счетчике импульсов 14в, которое необходимо для записи информации из счетчика импульсов 14в в блок памяти 13 а, после чего он обнуляется по входу "R" и процесс повторяется вновь.
В течение времени хранения информации в счетчике импульсов 14в импульсы с выхода логической схемы «И» 6в (эпюра д на фиг.2) поступают на вход "С" блока памяти 13а и записывают (перезаписывают) в него величину двоичного числа со счетчика импульсов 14в, поступающего на входы "D". Таким образом, блок памяти 13а запоминает величину координаты по каналу курса "Z" (эпюра и на фиг.2).
Преобразователь время-код 5б в канале тангажа "Y" полностью аналогичен преобразователю время-код 5а в канале курса "Z". Сигналы записи (с выхода блока 6в) из обоих преобразователей время-код поступают соответственно на первый и второй входы логической схемы «ИЛИ» 12в. Сигнал с выхода логической схемы «ИЛИ» 12в поступает на "R" вход счетчика импульсов 14а и обнуляет его. Таким образом, на выходе счетчика импульсов 14а (например, на его старшем разряде) всегда нулевой логический уровень.
При прерывании линии связи отсутствуют сигналы на выходах Z' и Y' блока разделения каналов по курсу и тангажу 4, а значит, и сигналы на первом и втором входах логической схемы «ИЛИ» 12в, при этом на "R" входах счетчика импульсов 14а и RS-триггера 10в будут логические нули. Счетчик импульсов 14а считает импульсы, поступающие на его "С" вход с синхронизатора 15в, и по достижении заданного временного интервала формирует на выходе сигнал с единичным логическим уровнем, который по входу "S" RS-триггера 10в выставляет на его выходе единичный логический уровень. Этот уровень поступает на "R" входы блоков памяти 13а и 13б и выставляет на их выходах "Z" и "Y" нулевые команды.
Таким образом, при отсутствии командных сообщений, например, на время Т (фиг.2) в блоках памяти 13а и 13б сохраняются последние значения координат соответственно по курсу "Z" и тангажу "Y". Время хранения этих координат определяет счетчик импульсов 14а, который производит отсчет времени с момента начала прерывания линии связи. При равенстве и превышении длительности времени прерывания линии связи заданного временного интервала, отсчитываемого счетчиком импульсов 14а, значения координат в блоках памяти 13а и 13б выставляются равными нулю. При этом в любой момент восстановления линии связи (в момент хранения последних значений координат или обнуления их) при декодировании на ракете входного сигнала в блоки памяти 13а и 13б записываются эти декодированные координаты.
Следовательно, в способе наведения телеориентируемой ракеты по лучу за счет того, что на ракете задают величину времени, в течение которого запоминают последние значения координат по курсу и тангажу при прерывании линии связи, обнуляют значения координат при времени запоминания, большем заданной величины, и выставляют измеренные значения координат при появлении сигналов теленаведения с момента восстановления линии связи, повышена точность наведения ракеты за счет исключения ложной команды управления, возникающей при прерывании линии связи.
Введение в систему теленаведения ракеты по лучу блока контроля величины времени памяти, выполненного в виде логической схемы «ИЛИ», счетчика импульсов, RS-триггера и синхронизатора, в котором выход логической схемы «ИЛИ» соединен со входом обнуления счетчика импульсов и первым входом RS-триггера, второй вход которого подключен к выходу счетчика импульсов, счетный вход которого соединен с выходом синхронизатора, причем выход RS-триггера подключен ко входам обнуления блоков памяти каналов курса и тангажа, а первый и второй входы логической схемы «ИЛИ» соединены с первыми выходами преобразователей время-код соответственно по курсу и тангажу, повысило точность наведения ракеты за счет исключения ложной команды управления, возникающей при прерывании линии связи.
Источник информации
1. "Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., Москва, "Советское радио", 1973 г., стр. 272, 276, 277; стр. 247, рис. 4.28.
Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке ракетных комплексов, в которых применяются лучевые системы теленаведения. Технический результат - повышение точности наведения ракеты за счет исключения ложной команды управления при прерывании линии связи. Предложен способ теленаведения ракеты по лучу, при котором вводят ракету в зону луча, измеряют на ракете ее координаты относительно точки прицеливания, а затем вырабатывают управляющие сигналы. На ракете задают величину времени, в течение которого запоминают последние значения координат по курсу и тангажу при прерывании линии связи, обнуляют значения координат при времени запоминания, большем заданной величины, и выставляют измеренные значения координат при появлении сигналов теленаведения с момента восстановления линии связи. Система теленаведения ракеты по лучу, реализующая способ, содержит на ракете последовательно соединенные приемник и блок разделения каналов по курсу и тангажу, выходы которого поканально подключены к одной из двух цепочек, состоящей из преобразователя время-код и блока памяти соответственно по курсу и тангажу. В каждой цепочке вход записи блока памяти подключен к первому выходу преобразователя время-код, а информационный вход - ко второму выходу преобразователя время-код. Пункт управления связан со входом приемника. Введен блок контроля величины времени запоминания, выполненный в виде логической схемы «ИЛИ», счетчика импульсов, RS-триггера и синхронизатора, при этом выход логической схемы «ИЛИ» соединен со входом обнуления счетчика импульсов и первым входом RS-триггера, второй вход которого подключен к выходу счетчика импульсов, счетный вход которого соединен с выходом синхронизатора, причем выход RS-триггера подключен ко входам обнуления блоков памяти каналов курса и тангажа, а первый и второй входы логической схемы «ИЛИ» соединены с первыми выходами преобразователей время-код соответственно по курсу и тангажу. 2 н.п. ф-лы, 2 ил.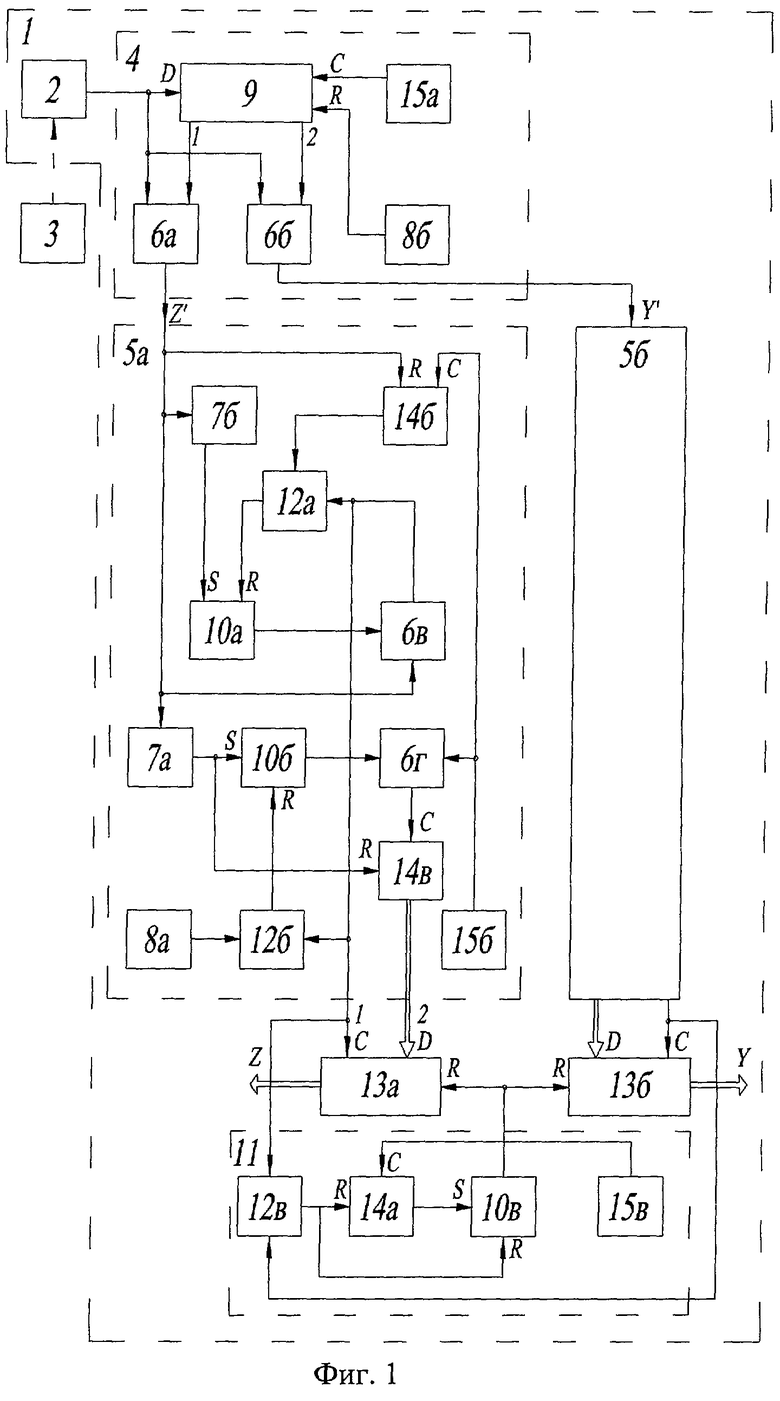
| Основы радиоуправления, под ред | |||
| ВЕЙЦЕЛЯ В.А | |||
| и ТИПУГИНА В.Н., М., Советское радио, 1973, с.247, 272, 276, 277 | |||
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

