Изобретение относится к радиотехнике и может быть использовано в метеорологии, авиации и других областях техники.
Цель изобретения - увеличение дальности действия и точности определения координат молниевых разрядов.
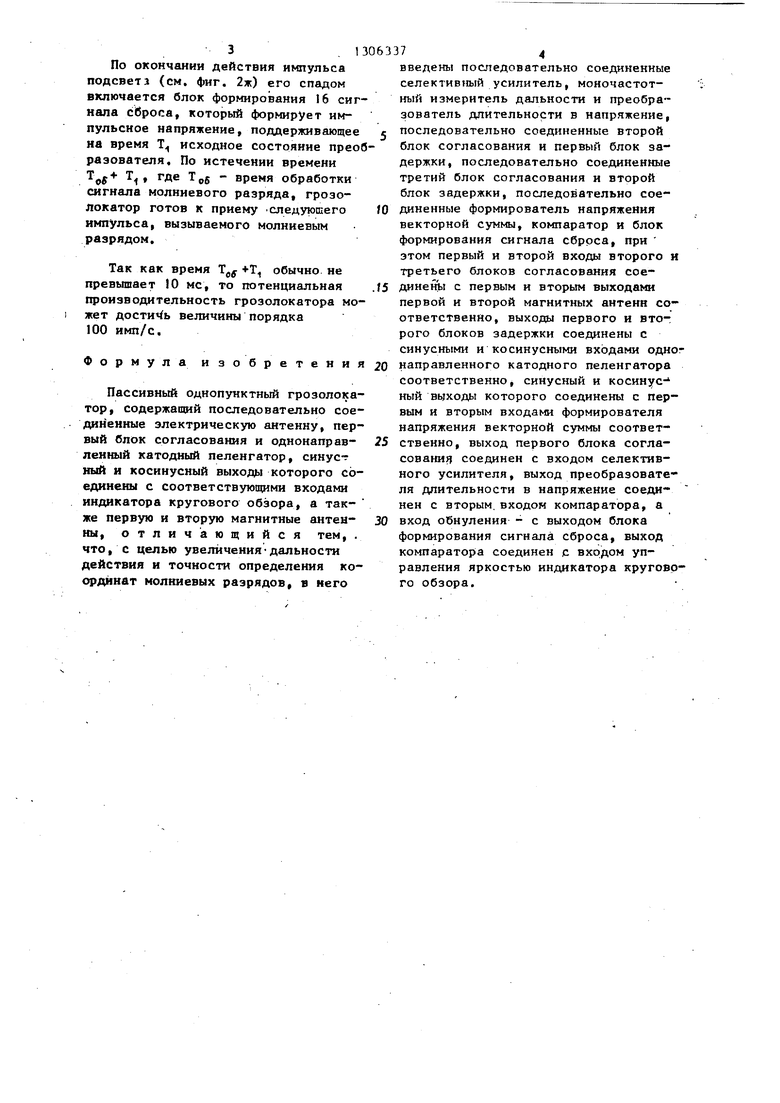
На фиг. 1 представлена структурная электрическая схема пассивного одноконтурного грозолокатора на фиг. 2 - эпюры напряжений, поясняющие принцип действия устройства.
Пассивный однопунктный грозолока- тор, содержит электрическую антен- ну 1, первый блок согласования 2, селективный усилитель 3, моночастотный измеритель 4 дальности, преобразователь 5 длительности в напряжение, индикатор 6 кругового обзора, пер- вую магнитную антенну 7, второй блок согласования 8, первый блок задержки 9, вторую магнитную антенну, 10, третий блок согласовани1 11 , второй блок задержки 12, однонаправленный катодный пеленгатор 13, формирователь 14 напряжения векторной суммы, компаратор J5 и блок 16 формирования сигнала сброса.
Устройство работает следующим об- разом.
Импульсы, возникающие при молниевых разрядах, воспринимаются одновременно и электрической антенной 1 и двумя магнитными антеннами 7 и 10, Импульсы, появляющиеся на-выходе первого блока согласования 2, включенного в тракт электрической антенны Г, с одной стороны, воздействуют на широкополосный более низкочастотный (f JJ 1 кГц) .селективный усилитель 3, йа выходе которого формируется реализация с квазипериодом, приращение длительности, которого связано с расстоянием до молниевогд разряда следующей зависимостью
км
0,71 (fo/uf) -ДТ„«:,
ДТ - приращение длительности
квазипериода;50
fj - центральная частота настройки селективного усилителя 3; flf - полоса пропускания селективного усилителя 3, отсчитываемая на, уровне 0,707; 55 D - расстояние от источника до
точки наблюдения,
другой стороны, этот же импульссигнал в зздействует на узкополосные более высокочастотные (f 7 5 кГц селективные усилители, входящие в состав однонаправленного катодного пеленгатора 13. Причем выходные напряжения этих усилителей используются как для определения пеленга, так и для снятия неоднозначности в .определении пеленга.
При помощи моночастотного измерителя дальности 4 формируется импульс (см. фиг, 2а), длительность которого &1 однозначно соответствует, с наперед выбранным постоянным коэффициентом, расстоянию до молниевого разряда. ,
Сформированный импульс длительности дТ поступает на преобразователь 5, который преобразует 4Т в постоянное напряжение (см. фиг, 2б), пропорциональные дальности (), которое, в свою очередь,является опорны для компаратора 15.
Импульсный сигнал, принятый магнитными антеннами 7 и 10, поступает через блоки согласования 8, Пи блоки задержки 9, 2, необходимые для правильного выбора режима работал компаратора, на входы однонаправленного катодного пеленгатора 13. С синусного и косинусного выходов этого пеленгатора импульсы напряжений U, и и„ (см. фиг. 2 в, г) воздействуют на взаимно перпендикулярные пластины х и у индикатора 6 кругового обзора, формируя несветящуюся на экране элек тронно-луЧевой трубки с послесвечением линию пеленга. Эти же напряжения синхронно поступают на вход формирователи 14 напряжения векторной суммы (см. фиг. 2 д)
и fu +и|.
Напряжение Uj воздействует на второй вход блока согласования 11.
При выполнении равенства U j UQ (см, фиг 2е) на выходе компаратора I5 появляется импульсное напряжение подсвета U 2 (см. фиг. 2ж), высвечивающее только ту часть линии пеленга, которая в момент подсвечивания своим мгновенным значением достигает положения, соответствующего измеренному расстоянию до.молниевого разряда. Таким образом, на экране индикатора 6 появляется светящаяся точка, поляриые координаты которой в точности соответствуют полярным координатам молниевого разряда в данный момент времени.
По окончании действия импульса подсветэ (см. фиг. 2ж) его спадом включается блок формирования 16 сигнала сброса, который формирует импульсное напряжение, поддерживающее на время Т исходное состояние преобразователя. По истечении времени Т , где Тр5 - время обработки сигнала молниевого разряда, гроэо- локатор готов к приему следующего импульса, вызываемого молниевым разрядом.
Так как время Т +Т обычно не превышает 10 мс, то потенциальная производительность грозолокатора может дости ь величины порядка 100 имп/с.
Формула изобретения
Пассивный однопунктный грозолока- тор, содержащий последовательно сое- дин еиные электрическую антенну, первый блок согласования и однонаправ- ленный катодный пеленгатор, синус- ный и косинусный выходы которого соединены с соответствующими входами индикатора кругового обзора, а также первую и вторую магнитные антен- ны, отличающийся тем, . что, с целью увеличеиия-дальности действия и точности определения координат молниевых разрядов, в него
введены последовательно соединенные селективный усилитель, моночастотный измеритель дальности и преобразователь длительности в напряжение, последовательно соединенные второй блок согласования и первый блок задержки, последовательно соединенные третий блок согласования и второй блок задержки, последовательио соединенные формирователь напряжения векторной суммы, компаратор и блок формирования сигнала сброса, при этом первый и второй входы второго и третьего блоков согласования сое- диненЪ с первым и вторым выходами первой и второй магнитных антенн соответственно, выходы первого и второго блоков задержки соединены с синусными и косинусными входами одно направленного катодного пеленгатора соответственно, синусный и косинус- ный выходы которого соединены с первым и вторым входами формирователя напряжения векторной суммы соответственно, выход первого блока согла- сования соединен с входом селективного усилителя, выход преобразователя длительности в напряжение соединен с вторым, входом компаратора, а вход обнуления- - с выходом блока формирования сигнала сброса, выход компаратора соединен с входом управления яркостью индикатора кругового обзора.
i,L/0
oi
к
Ш
ж
,
Фаг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Пассивный однопунктовый определитель координат молниевых разрядов | 1989 |
|
SU1672387A1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1201790A1 |
| Однопунктная система местоопределения гроз в ближней зоне | 1978 |
|
SU720384A1 |
| СОВМЕЩЕННАЯ ВСТРОЕННАЯ СИСТЕМА КОНТРОЛЯ И ЕЕ ВАРИАНТ | 2004 |
|
RU2277716C1 |
| Однопунктная система местоопреде-лЕНия гРОз B ближНЕй зОНЕ | 1979 |
|
SU800922A1 |
| БОРТОВОЙ ГРОЗОПЕЛЕНГАТОР-ДАЛЬНОМЕР | 2000 |
|
RU2200963C2 |
| КРУГОВОЙ ПЕЛЕНГАТОР (ВАРИАНТЫ) | 2006 |
|
RU2319162C9 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1187120A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОЛНИЕВОГО РАЗРЯДА И МНОГОПУНКТОВАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2253133C2 |
| СПОСОБ ОПТИМАЛЬНОГО ОБХОДА ГРОЗЫ | 2005 |
|
RU2316023C2 |
Изобретение относится к радио- rexHHKie. Цель изобретения - увеличение дальности действия и точности определения координат молниевых разрядов. Грозолокатор содержит электрическую антенну 1, три блока согласования 2, 8 и II, селективный у-ль 3 моночастотный измеритель 4 дальности, преобразователь 5 длительности в напряжение, индикатор 6 кругового обзора, две магнитные антенны 7 и 10, два блока задержки 9 и 12, однонаправленный катодный пеленгатор 13, формирователь 14 напряжения векторной суммы, компаратор 15 и блок формирования 16 сигнала сброса. Цель достигается путем формирования на выходе компаратора 15 импульсного напряжения подсвета, высвечивающего только ту часть линии пеленга, которая в момент подсвечивания своим мгновенным значением достигает положения, соответствующего измеренному расстоянию до молниевого разряда. Т.о. на экране индикатора 6 появляется светящаяся точка, полярные ко- . ординаты которой в точности соответствуют полярным координатам молниевого разряда в данный момент времени. 2 ил. С « (Л ФигЛ
| Однопунктная система местоопределения гроз в ближней зоне | 1978 |
|
SU720384A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕН'ИЯ ГРОЗОВОГО РАЗРЯДА | 0 |
|
SU305434A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
