Изобретение касается устройства для уравновешивания силы, предназначенного для перемещения груза по заданной траектории, в частности по линейной траектории.
Известны уравновешивающие устройства такого типа, содержащие шарнирный механизм, состоящий из ближнего рычага, установленного на кронштейне и закрепленного на первой оси вращения, и отдаленного рычага, установленного на ближнем плече и закрепленного вокруг второй оси вращения, расположенной параллельно первой оси, при этом отдаленный рычаг имеет свободный конец, несущий груз.
Уравновешивающее устройство с двумя шарнирными рычагами такого типа имеет широкий диапазон применения, в частности в области манипуляторов, погрузочно-разгрузочных устройств и т.д. Оно может также применяться в качестве пантографа, в частности электровозного пантографа для электровозов.
Известны различные решения для уравновешивания груза, перемещаемого шарнирным механизмом.
Прежде всего известны решения с применением пневматики, в которых используют силовой цилиндр, обеспечивающий удержание груза на весу и/или его перемещение, например, в вертикальном направлении.
Такие решения дают относительно удовлетворительные результаты при слабых нагрузках, однако становятся неуправляемыми, как только объем воздуха в силовом цилиндре превышает значение, примерно равное 1 дм3. Это происходит из-за потерь энергии, порождающих колебания давления между различными точками контура, а также из-за сжимаемости воздуха. Недостатком таких пневматических средств является время срабатывания порядка одной секунды, что соответствует незначительной величине полосы пропускания, то есть слишком большому промежутку времени, чтобы остаться не замеченным оператором.
Известны также смешанные решения, в которых пневматическая система соединена с противовесом. Эти решения приводят к тем же результатам, что и предыдущие, к тому же в них значительно возрастает инерция, что отрицательно сказывается на горизонтальном перемещении груза.
Кроме того, известны решения с применением электрической тяги, в которых, как правило, используют так называемые тали с автоматическим регулированием нагрузки. С одной стороны, этим решениям присущи недостатки всех сложных систем (опасность поломки), и, с другой стороны, для них необходимо наличие фазы взвешивания, во время которой груз не контролируется и представляет опасность для оператора. Кроме того, недостатком этих решений является значительное время срабатывания, несовместимое с удобством управления, из-за незначительной полосы пропускания. В частности, это происходит, когда такое перемещение требует наличия нематериализованного положения и, следовательно, наличия позиционной петли.
Известны также решения с применением параллелограмма, описанные во французской патентной заявке №0003047, недостатком которых является то, что они не обеспечивают направления перемещения (как в случае троса), либо требуют использования дугообразной траектории в вертикальной плоскости, и, с другой стороны, в них все усилия, связанные с весом, концентрируются только на одном рычаге параллелограмма. В решении, описанном во французском патенте №9607556, применяется параллелограмм, но оно не содержит никакого координационного средства. Поэтому нельзя полагаться на полосу пропускания комплекса даже при высоком качестве уравновешивающих средств.
Целью настоящего изобретения является устранение указанных недостатков.
В частности, объектом изобретения является устройство с повышенными характеристиками для уравновешивания силы, позволяющее направлять груз по траектории и имеющее повышенную полосу пропускания.
Таким образом, настоящее изобретение касается устройства для уравновешивания силы, определенного в вводной части, содержащего первые средства уравновешивания с повышенной полосой пропускания, имеющие первую выходную ось и действующие на ближний рычаг, вторые средства уравновешивания с повышенной полосой пропускания, имеющие вторую выходную ось и действующие на отдаленный рычаг, а также средства координирования с высокой полосой пропускания, установленные между первыми средствами уравновешивания и вторыми средствами уравновешивания для координации вращательных движений соответственно ближнего рычага и отдаленного рычага.
Таким образом, настоящее изобретение позволяет уравновешивать отдельно ближний рычаг и отдаленный рычаг шарнирного механизма, благодаря наличию скоординированных между собой первых средств уравновешивания и вторых средств уравновешивания. Это позволяет минимизировать явления инерции, действующие на систему уравновешивания, и трансмиссионную упругость проксимального рычага и дистального рычага.
Эти средства уравновешивания имеют повышенную полосу пропускания, что подразумевает полосу пропускания порядка сотни герц, причем без учета сил трения и инерции.
Как известно, под полосой пропускания понимают способность механической системы реагировать на переходные явления. На практике это означает способность указанной системы сохранять свои характеристики при воздействии усилий, которые в данном случае могут быть порядка сотни герц, что может быть также определено как время срабатывания порядка сотой доли секунды.
В рамках настоящего изобретения можно использовать различные типы средств уравновешивания, в том числе в ряде случаев некоторые из средств моторизации.
Согласно предпочтительному варианту реализации настоящего изобретения устройство содержит стабилизатор, выполненный с возможностью обеспечения синусоидального механического момента и имеющий две выходные оси с синхронизированными скоростями вращения, но с противоположными направлениями вращения, в котором эти две выходные оси связаны во вращении соответственно с первой осью вращения ближнего рычага и со второй осью вращения отдаленного рычага.
В качестве примера, такой стабилизатор может быть типа стабилизатора, описанного во французском патенте №8802423 (опубликован под номером 2627718).
Такой известный стабилизатор, являющийся чисто механическим, применяют для уравновешивания сил, действующих на рычаг под нагрузкой, например, инструмента. Он позволяет добиться точного уравновешивания рычага, независимо от его углового положения, и может поворачиваться на 360°, позволяя грузу описывать круговую траекторию.
Данный известный стабилизатор обеспечивает синусоидальный момент с высоким коэффициентом полезного действия и повышенную полосу пропускания, то есть механическое уравновешивание с незначительным временем срабатывания.
Так, когда обе выходные оси стабилизатора связаны во вращении соответственно с осью вращения ближнего рычага и с осью вращения отдаленного рычага, уравновешивающее устройство в соответствии с настоящим изобретением обеспечивает синхронное перемещение обоих рычагов для осуществления единого маневра с грузом, независимо от распределения нагрузок на каждый из двух рычагов шарнирного механизма.
Предпочтительно одна из выходных осей стабилизатора является осью вращения ближнего рычага, тогда как другая выходная ось соединена с осью вращения отдаленного рычага через трансмиссионные средства.
Для этого можно применять различные механические средства, в частности, средства, содержащие по меньшей мере один деформирующийся параллелограмм.
Согласно другому отличительному признаку настоящего изобретения ближний рычаг и отдаленный рычаг имеют одинаковую длину.
Отсюда следует, что груз может перемещаться по прямолинейной траектории с амплитудой движения, соответствующей четырехкратной длине каждого из указанных рычагов.
Согласно другому отличительному признаку настоящего изобретения устройство содержит вспомогательные средства моторизации, состоящие по меньшей мере из одного привода, соединенного по меньшей мере с одним подвижным узлом устройства.
Такие средства моторизации можно применять для различных целей, в частности для перемещения шарнирного механизма из одного в другое из двух положений, являющихся рабочим положением и дежурным положением.
Предпочтительно эти регулировочные средства содержат противовес, перемещаемый по ближнему рычагу или по отдаленному рычагу.
Настоящим изобретением предусмотрено также, что устройство может содержать вспомогательные средства моторизации, управляемые датчиком усилия, установленным в определенном месте, для помощи оператору в случае ручного перемещения груза или для обеспечения постоянной силы, воздействующей на данный узел.
В предпочтительном варианте применения настоящего изобретения на свободном конце отдаленного рычага установлены дуговые токоприемники электровозного пантографа, снимающие электрическую энергию с контактного провода, при этом нагрузка в данном случае является силой, с которой дуговые токоприемники действуют на контактную сеть.
В случае применения в электровозном пантографе предпочтительно, чтобы устройство содержало по меньшей мере одно приспособление, в частности, элерон, жестко закрепленное во вращении со второй выходной осью, при этом оно может быть установлено либо на этой второй выходной оси, либо свободно вращаться на первой выходной оси, имеет определенную геометрическую форму и перемещается параллельно отдаленному рычагу, с которым оно также жестко закреплено во вращении, при этом указанное приспособление расположено на таком радиусе вращения, чтобы его прохождение через воздух создавало момент, равный и противоположный моменту прохождения через воздух шарнирного механизма (в данном случае пантографа), при этом эти два момента взаимно уничтожаются в механике соединения. Таким образом реализуют пантограф, не чувствительный к скорости ветра.
Как уже было указано выше, средства уравновешивания в соответствии с настоящим изобретением могут, как вариант, содержать средства моторизации.
В другом варианте реализации, в частности, предназначенном для применения в электровозном пантографе, сервоприводные средства моторизации позволяют получать усилия инерции, связанные с перемещением всей конструкции по вертикальной оси. Тем самым добиваются, чтобы эти перемещения не сказывались на усилиях, с которыми дуговые токоприемники действуют на контактную сеть. Кроме того, такие сервоприводные средства моторизации позволяют компенсировать недостаточность момента, определяемого вышеупомянутым элероном, и даже его отсутствие.
Данные средства моторизации содержат электродвигатель, соединенный с червячным винтом, взаимодействующим с гайкой, при этом данная гайка установлена на кривошипе, соединенном с одной из первой или второй выходных осей, при этом сервоприводные средства предназначены для управления двигателем при помощи командного сигнала, выдаваемого датчиком усилия, установленного на свободном конце отдаленного рычага.
Предпочтительно червячный винт выполнен в виде реверсивного червяка, приводимого в движение от электродвигателя через редуктор, при этом между редуктором и червячным винтом установлен механизм сцепления.
Наличие этого редуктора позволяет применять червячный винт с большим шагом витка, реверсивный и имеющий высокий обратный коэффициент полезного действия. Вместе с тем можно также использовать более слабый червяк, но уже без редуктора.
Предпочтительно сервоприводные средства содержат тахометрический генератор постоянного тока, приводимый в движение электродвигателем и предназначенный для подачи сигнала скорости, при этом первый операционный усилитель (контур скорости) принимает этот сигнал скорости и выдает первый выходной сигнал, второй операционный усилитель (контур тока) принимает первый выходной сигнал и выдает второй выходной сигнал, усилитель мощности принимает этот второй выходной сигнал и выдает выходной ток, поступающий на электродвигатель, и символ этого выходного тока поступает на второй операционный усилитель, при этом командный сигнал от датчика усилия подается на вход второго операционного усилителя (контур тока).
Предпочтительно также, чтобы сервоприводные средства моторизации использовались также в качестве вспомогательной системы для обеспечения свертывания и развертывания.
Такой механизм свертывания и развертывания представляет особенный интерес, когда на свободном конце отдаленного рычага установлены дуговые токоприемники электровозного пантографа.
Предпочтительно этот механизм выполняют с возможностью приема командного сигнала, подаваемого на первый операционный усилитель (контур скорости) для свертывания или развертывания шарнирного механизма. Этот сигнал в данном случае является приоритетным по отношению к сигналу датчика скорости, подаваемому на контур тока.
Предпочтительно также, чтобы данный механизм мог принимать экстренный сигнал, поступающий на первый операционный усилитель (контур скорости) для экстренного свертывания шарнирного механизма. Этот сигнал также будет приоритетным по отношению к сигналу датчика усилия, поступающему на контур тока.
Такая приоритетность контура скорости по отношению к контуру тока имеет значение всякий раз, когда на некоторое значительное время пропадает усилие дуговых токоприемников, с которым они действуют на контактный провод.
Согласно еще одному отличительному признаку настоящего изобретения сервоприводные средства содержат средства коррекции, выполненные с возможностью вносить поправку между командным сигналом, выдаваемым датчиком усилия, и реальным усилием, действующим на груз, для компенсирования усилий инерции, связанных с механикой на выходе датчика, в частности, с массой дуговых токоприемников в случае электровозного пантографа. Указанные средства коррекции содержат деривационные средства, выполненные с возможностью отводить по отношению ко времени значения изменения скорости, снимаемые с тахометрического генератора, и подавать их на вход второго операционного усилителя.
Другая вспомогательная приводная система, отличная от описанной выше системы, обеспечивает свертывание пантографа в случае поломки этой первой системы.
В нижеследующем описании, приведенном исключительно в качестве примера, делаются ссылки на прилагаемые чертежи, на которых:
Фиг.1 - схема устройства уравновешивания согласно первому варианту реализации настоящего изобретения.
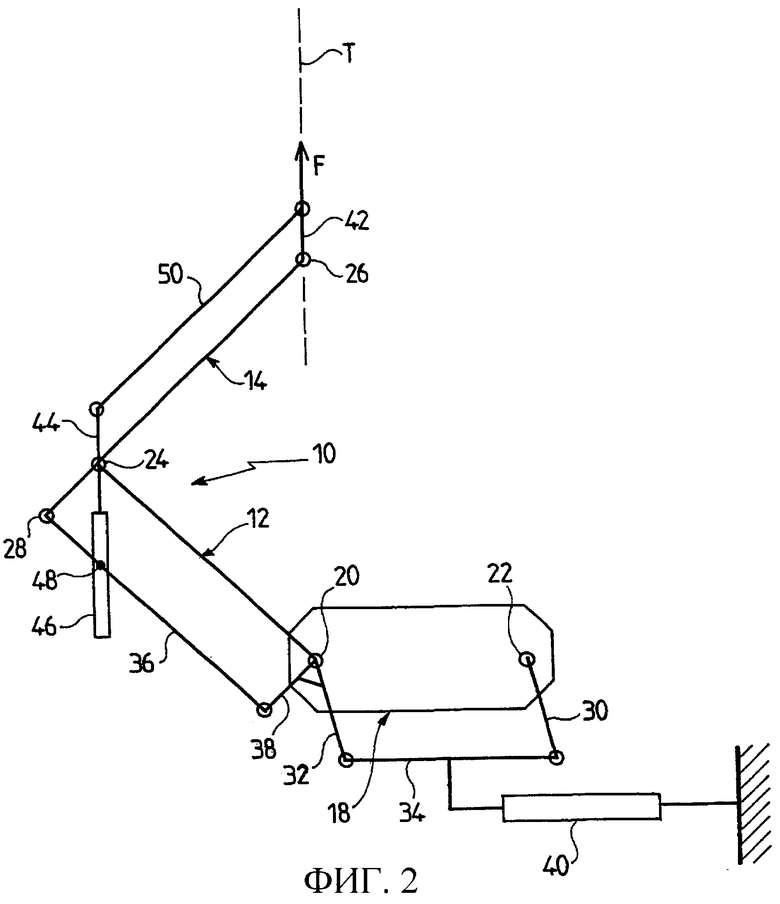
Фиг.2 - схема устройства уравновешивания согласно второму варианту реализации настоящего изобретения.
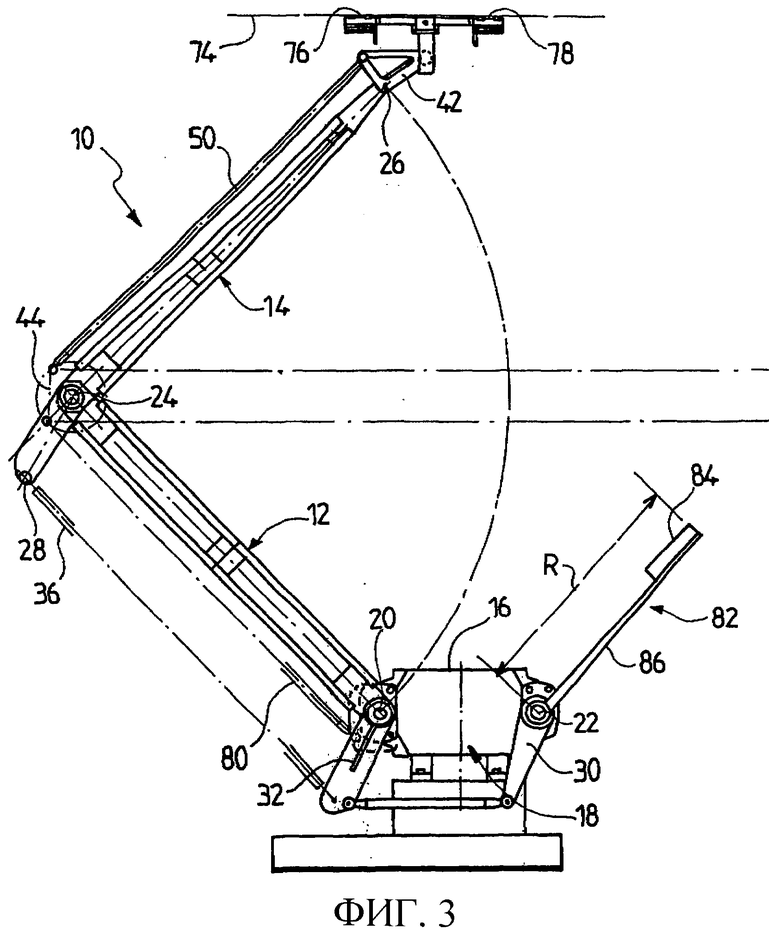
Фиг.3 - вид сбоку устройства уравновешивания согласно третьему варианту реализации настоящего изобретения, применяемому для электровозного пантографа.
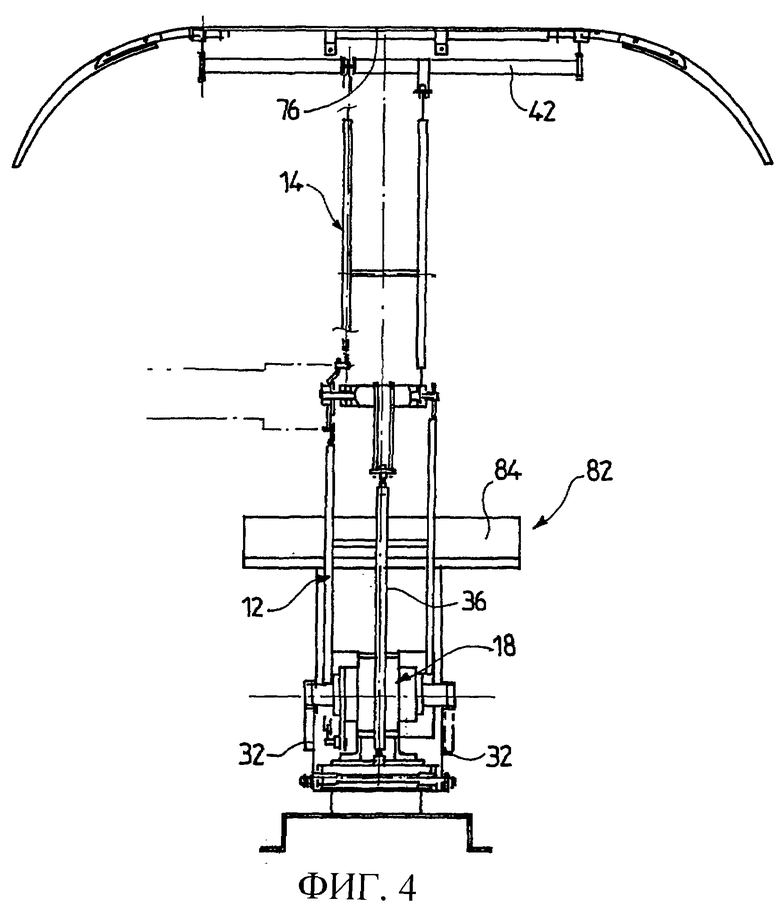
Фиг.4 - вид спереди варианта, показанного на фиг.3.
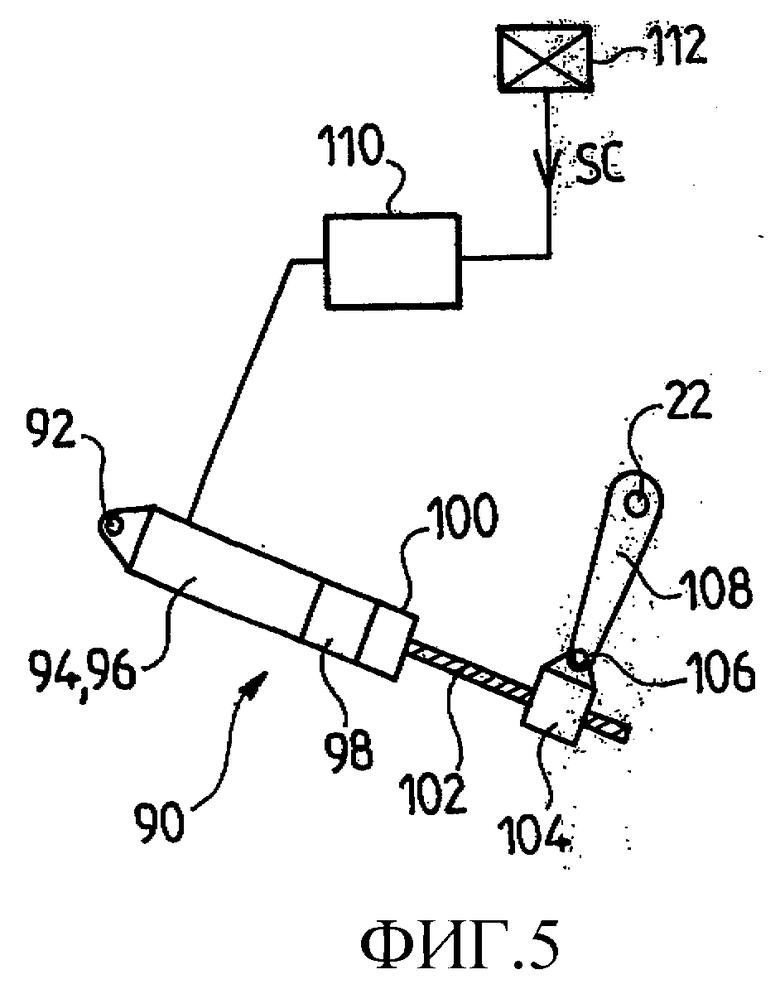
Фиг.5 - изображение средств моторизации в соответствии с настоящим изобретением.
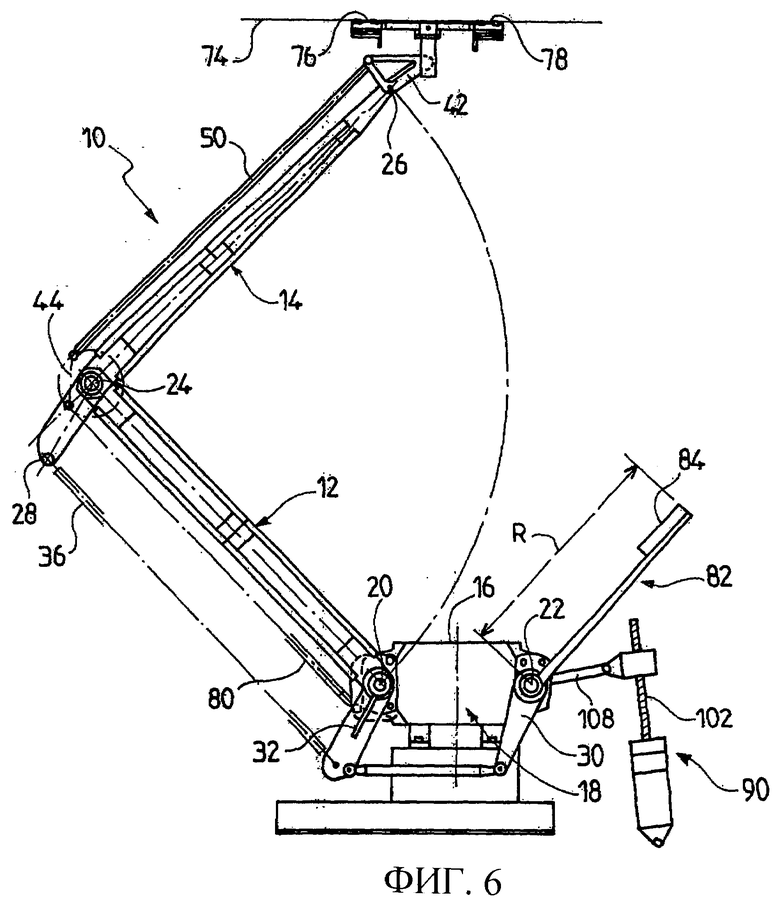
Фиг.6 - изображение варианта, показанного на фиг.3, со средствами моторизации, показанными на фиг.5 и 6.
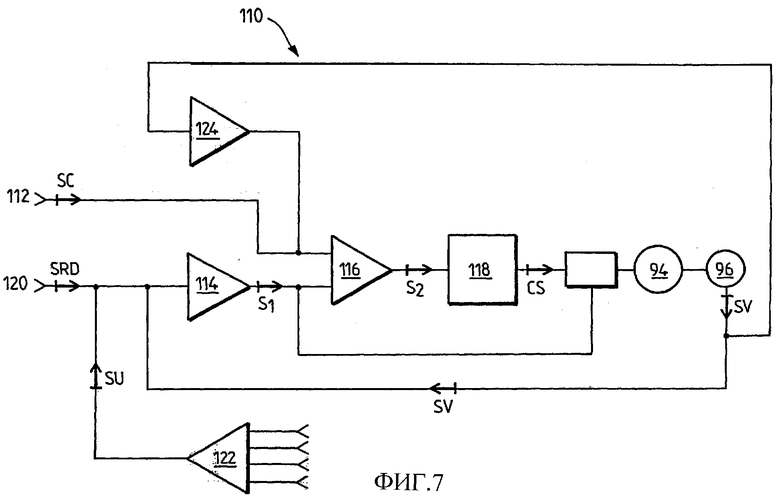
Фиг.7 - изображение схемы сервопривода, входящего в средства моторизации, показанные на фиг.5 и 6.
Показанное на фиг.1 устройство уравновешивания содержит шарнирный механизм 10, состоящий из ближнего рычага 12 и отдаленного рычага 14. Проксимальный рычаг 12 установлен на кронштейне 16, который в данном случае является несущей рамой или корпусом стабилизатора 18.
Этот стабилизатор предпочтительно является стабилизатором, описанным в вышеупомянутом французском патенте №8802423. Он содержит две выходные оси или два выходных вала 20 и 22, параллельных между собой и в данном примере расположенных горизонтально. Стабилизатор выполнен с возможностью создания синусоидального момента, а две выходные оси 20 и 22 соединены с возможностью синхронизации скоростей вращения, но в противоположном направлении.
Выходная ось 20 совпадает с осью вращения ближнего рычага 12. Отдаленный рычаг 14 установлен на ближнем рычаге 12 и закреплен вокруг оси вращения 24, параллельной выходной оси 20.
Отдаленный рычаг 14 имеет свободный конец 26, создающий силу F, и противоположный конец 28, образующий шарнирную ось.
Ближний рычаг 12 установлен на выходной оси 20 стабилизатора 18 и жестко соединен с ней во вращении.
На выходной оси 22 стабилизатора установлен кривошип 30 и тоже жестко соединен с ней во вращении. Вследствие этого проксимальный рычаг 12 и кривошип 30 поворачиваются синхронно, но в противоположном направлении.
Кривошип 32 установлен на выходной оси 20 в подшипниках (не показаны), что позволяет ему свободно вращаться на этой оси.
Кроме того, на концах кривошипов 30 и 32 при помощи подшипников (не показаны) установлена тяга 34, обеспечивающая вращательное движение и создающая таким образом параллелограмм, передающий усилия от кривошипа 30 к кривошипу 32.
Отдаленный рычаг 14 установлен на конце ближнего рычага 12 при помощи подшипников (не показаны), которые позволяют ему свободно поворачиваться вокруг оси 24.
Рычаг 14 имеет длину L, заключенную между его концом 26 и осью 24 и равную длине рычага 12, определенной между осями 20 и 24.
Параллельный ближнему рычагу 12 шатун 36 установлен с одной стороны на кривошипе 38 и с другой стороны на конце 28 отдаленного рычага 14 при помощи подшипников (не показаны), создавая таким образом второй параллелограмм, передающий усилия от кривошипа 38 к отдаленному рычагу 14. Кривошипы 32 и 38 установлены на выходной оси 20 с возможностью свободного вращения вокруг нее, но при этом жестко закреплены друг с другом, образуя угол А, позволяющий избежать заклинивания.
Выходные оси 20 и 22 вращаются синхронно в противоположном направлении и отрегулированы таким образом, что, когда рычаг 12 находится в горизонтальном положении, кривошип 38 тоже расположен горизонтально (в одну или в другу сторону в зависимости от того, находится ли шатун 36 над рычагом 12 или под ним). Вследствие этого при повороте выходных осей 20 и 22 на 180° свободный конец 26 перемещается по прямой линии на расстояние или амплитуду, равную 4 х L. Эта прямая линия соответствует прямолинейной траектории Т, которая в данном примере имеет вертикальное направление.
Понятно, что биссектриса переменного угла, образованного между рычагами 12 и 14, остается таким образом параллельной самой себе.
Поскольку стабилизатор 18 создает синусоидальный момент, передаваемая на конец 26 сила Г является постоянной величиной и все время остается параллельной указанному стрелкой направлению. Эта сила равна сумме максимальных моментов (рычаг 12 в горизонтальном положении), создаваемых стабилизатором на выходных осях 20 и 22, за вычетом момента, возникающего от веса различных подвижных элементов (рычаги, кривошипы, шатуны, тяги, опорные подшипники, подшипники качения и т.д., плюс различные подвешенные системы или инструменты), поделенного на значение 2 х L (за исключением случаев, когда рычаги 12 и 14 находятся в вертикальном положении и направлены вниз или вверх, когда возникает явление заклинивания).
Эту силу можно использовать для уравновешивания массы, которая будет в этом случае «в состоянии невесомости» по всей траектории Т (в данном случае вертикальной траектории), или для приложения силы, которой, например, должен воздействовать дуговой токоприемник на контактный провод.
Показанное на фиг.2 устройство содержит те же базовые элементы, что и устройство, показанное на фиг.1, поэтому общие элементы обозначены одинаковыми позициями. Оно дополнительно содержит вспомогательные средства моторизации 40, действующие в данном примере на тягу 34 и применяемые в различных целях.
Эти вспомогательные средства моторизации могут, в частности, применяться для перемещения шарнирного механизма 10 из одного в другое из двух положений, являющихся рабочим положением и дежурным положением. Эти средства моторизации нейтрализуются, когда устройство находится в рабочем или штатном положении.
Как вариант, эти вспомогательные средства моторизации могут также применяться для уравновешивания дополнительных масс, которые не всегда имеются в наличии или вес которых существенно отличается друг от друга, или для компенсирования отсутствия дополнительной массы. В качестве примера, основной массой может быть захватное устройство, а дополнительными массами - различные детали, при этом приложение средств моторизации 40 ограничено весом имеющейся в наличии детали.
Эти вспомогательные средства моторизации могут также применяться для обеспечения необходимых перемещений конца 26, при этом их приложение ограничено преодолением сил трения и инерции, за исключением случаев разбалансировки.
Речь может также идти о различных комбинациях вспомогательного назначения, уравновешивания дополнительных масс и моторизации.
В случае необходимости устройство уравновешивания может применяться в совокупности с устройством управления механического манипулятора с сервоприводом, что описано во французской патентной заявке №0003047, поданной на имя заявителя.
Само собой разумеется, что вспомогательные средства моторизации 40 могут иметь любой привод (пневматический, гидравлический, электрический и т.д.) и действовать в прямолинейном или круговом направлении. Кроме того, точка их приложения не ограничивается тягой 34, речь может идти о любой детали, связанной с движением, в том числе о выходных осях 20 и 22 и даже о свободном конце 26 отдаленного рычага.
Показанное на фиг.2 устройство содержит дополнительно средства обеспечения постоянной ориентации тяги 42, находящейся под нагрузкой (сила Г). Таким образом, эта тяга 42 расположена в направлении вышеупомянутой траектории Т.
Устройство содержит кривошип 44, установленный на конце ближнего рычага 12 при помощи подшипников с возможностью свободного вращения по отношению к этому рычагу. На нижнем конце кривошипа 44 установлена удлиненная деталь 46, содержащая прямоугольное отверстие, в котором перемещается палец 48, закрепленный на шатуне 36 на вертикальной линии, проходящей через шарнир 24. Когда палец 48 скользит в прямоугольном отверстии вследствие деформации параллелограмма, образованного рычагами 12 и 14, тягой 38 и шатуном 36, во время работы кривошип 44 остается в вертикальном положении. Шатун 50 закреплен при помощи подшипников с возможностью свободного вращения на конце кривошипа 44 и своим концом на тяге 42 с возможностью сохранения параллельности с рычагом 14 и образования таким образом деформирующегося параллелограмма.
Можно также заменить это устройство с подвижным пальцем на параллелограмм, стремящийся занять заданное положение, в данном случае вертикальное, между выходной осью 20 и определенной точкой.
В некоторых вариантах применения на тяге 42 можно установить инструмент (не показан), сохраняющий определенное направление, независимо от своего центра тяжести, в частности, инструмент для захвата детали, обеспечивающий изменение направления этой детали.
Необходимо отметить, что изменение требуемой нагрузки или усилия, на конце 26 (фиг.1) может быть достигнуто, кроме средств моторизации 40, путем перемещения какого-либо груза вдоль одного из рычагов 12 и 14. Это перемещение может производиться вручную или механизированным способом. Оно позволяет изменять механический момент, связанный с весом подвижных элементов и влияющий на устройство 18.
На фиг.3 и 4 показано уравновешивающее устройство в соответствии с настоящим изобретением, сходное с устройством на фиг.2 и применяемое в пантографе железнодорожного электровоза. Общие с фиг.2 элементы обозначены одинаковыми цифровыми позициями. Устройство содержит два дуговых токоприемника 76 и 78, выполненных с возможностью установления контакта с контактным проводом (не показан).
Этот вариант выполнения предназначен для улучшения противодействия горизонтальным усилиям, в частности усилиям, возникающим от сопротивления при прохождении через воздух.
Уже сама конструкция пантографа обеспечивает хорошую сопротивляемость по отношению к боковым усилиям, действующим перпендикулярно направлению движения электровоза, поэтому не представляет большой проблемы.
Проблема возникает в отношении усилий, возникающих и действующих вдоль направления движения электровоза.
Стабилизатор, описанный в вышеупомянутом французском патенте 8802423, имеет высокие значения прямого и косвенного КПД, а именно порядка 98%. Повышенная полоса пропускания этого механизма обеспечивает пантографу очень хорошую передачу момента от одной выходной оси к другой. Действительно, поскольку выходные оси вращаются в противоположных направлениях, стабилизатор меняет направление передаваемого момента сил от одной выходной оси к другой. Эта характеристика обеспечивает определенную устойчивость всей конструкции.
Устройство согласно варианту выполнения, показанному на фиг.3 и 4, отличается от устройства, показанного на фиг.2, в том, что касается средств, обеспечивающих постоянную ориентацию тяги 42. Удлиненная деталь 46, содержащая прямоугольное отверстие (фиг.2), заменена штангой 80, стремящейся занять определенное направление на несущей раме стабилизатора.
В этом случае усилие, возникающее при прохождении через воздух дуговых токоприемников 76 и 78 и их кронштейнов, а также трение о контактный провод не влияют на поведение пантографа на вертикальной оси. Это относится ко всей механике на конце отдаленного рычага.
Однако усилие при прохождении через воздух ближнего рычага 12 и отдаленного рычага 14 полностью не компенсируется. На выходной оси 20 (на которой установлен ближний рычаг) остается момент, эквивалентный моменту, порождаемому усилием прохождения через воздух отдаленного рычага 14, передаваемым на конец ближнего рычага 12.
В результате этого, в зависимости от направления движения электровоза происходит либо увеличение, либо уменьшение усилия, с которым дуговые токоприемники действуют на контактный провод. Это явление мешает нормальной работе пантографа, и его необходимо учитывать для того, чтобы устранить или по крайней мере уменьшить это влияние.
Первое решение состоит в установке на второй выходной оси 22 стабилизатора конструкции, эквивалентной конструкции шарнирного механизма, установленного на первой выходной оси 20, которая может создать такой же момент, и эти два момента взаимно уничтожаются в стабилизаторе.
Такое решение имеет ряд недостатков, в частности утяжеление конструкции, увеличение инерции и увеличение в два раза габаритов пантографа в свернутом положении. К тому же такое решение требует больших затрат.
Для устранения этого недостатка настоящим изобретением предлагается другое решение, заключающееся в моделировании этой конструкции и ее замене приспособлением, в частности элероном, эквивалентным по своим аэродинамическим качествам этой второй конструкции.
На фиг.3 и 4 показано такое приспособление 82, в данном случае выполненное в виде элерона, имеющее определенную геометрическую форму и перемещающееся параллельно отдаленному рычагу 14, с которым оно жестко соединено во вращении.
Это приспособление 82 расположено на радиусе вращения К таким образом, что его прохождение через воздух создает момент, равный и противоположный по направлению моменту прохождения через воздух шарнирного механизма 10 (пантографа), при этом оба момента взаимно уничтожаются в механике соединения стабилизатора 18.
В данном примере приспособление 82 содержит профиль 84, образующий собственно элерон и закрепленный на конце двух рычагов 86, жестко соединенных во вращении с кривошипами 30.
Вследствие этого оба рычага перемещаются во вращении одновременно с ближним рычагом, но в противоположном направлении.
Ранее отмечалось, что остаточный момент порождается силой, соответствующей прохождению через воздух отдаленного рычага и действующей на конец ближнего рычага.
Приспособление 82, жестко соединенное во вращении со второй выходной осью стабилизатора, обеспечивает одинаковые условия трения, так как его угол воздушной атаки совпадает с углом воздушной атаки дистального рычага, с которым оно также жестко соединено во вращении, и изменения плеча его рычага абсолютно симметричны изменениям плеча ближнего рычага. Поэтому оно создает момент сил, эквивалентный по природе и значению остаточному моменту, создаваемому при прохождении через воздух конструкции пантографа. Вследствие этого оба момента взаимно уничтожаются в механике стабилизатора.
Разумеется, что в такую модель можно вносить изменения в том, что касается конструкции и геометрии элерона и его радиуса вращения, в зависимости от аэродинамических характеристик электровоза и пантографа.
Кроме того, эта система может применяться дополнительно по отношению ко всем пунктам, упомянутым выше со ссылками на фиг.1 и 2, в частности, при применении автоматического изменения усилий (см. описанные ниже средства моторизации 90), в случае которого она используется для облегчения регулировки, и ее функция ограничивается влиянием на инерцию пантографа.
Добавление этого приспособления не имеет существенного влияния на общую инерцию пантографа. Его вес полностью учитывается стабилизатором.
Наконец, это приспособление позволяет корректировать искажение, возникающее от того, что, в отличие от предположений, берущихся для расчетов, и несмотря на то, что отдаленный рычаг и ближний рычаг имеют одинаковую длину, усилие прохождения через воздух отдаленного рычага не идентично усилию ближнего рычага, в частности, по причине обтекаемой формы электровоза и наличия шатуна 36.
В одной из форм выполнения приспособление может быть установлено на кривошип 32, который жестко соединен во вращении с выходной осью стабилизатора, при этом такое расположение позволяет сократить габариты приспособления в свернутом положении. В этом случае приспособление установлено с возможностью свободного вращения на первой выходной оси 20.
В целом, любое средство компенсирования усилия прохождения через воздух конструкции пантографа, жестко соединенное во вращении со второй выходной осью стабилизатора, может быть одинаково установлено как на первой выходной оси, так и на второй выходной оси, и даже на обеих осях одновременно.
Конструкция приспособления не ограничивается элероном, как показано на фиг.3 и 4, и может быть близкой к конструкции отдаленного рычага, моделируя при этом его прохождение через воздух.
На фиг.5 показаны средства моторизации 90, используемые в качестве сервопривода шарнирного механизма 10, которым предпочтительно является пантограф электровоза, как показано на фиг.6.
Эти сервоприводные средства моторизации предпочтительно применяются в сочетании с механическим стабилизатором 18 с двумя выходными осями 20 и 22, описанными выше. Эти средства моторизации 90 содержат узел, шарнирно соединенный с осью 92 и содержащий электродвигатель 94 с присоединенным к нему тахометрическим генератором постоянного тока 96. Через редуктор 98 и сцепление 100 этот электродвигатель 94 приводит в движение червячный винт 102, взаимодействующий с гайкой 104. Эта гайка 104 шарнирно соединена в точке 106 с концом кривошипа 108, соединенного с одной из выходных осей 20 и 22 стабилизатора 18. Предпочтительно это соединение обеспечивает изоляцию между электрическим потенциалом стабилизатора (контактный провод) и червячного винта (масса электровоза).
Схема 110 сервопривода, описанная ниже со ссылкой на фиг.7, управляет электродвигателем при помощи командного сигнала 5С, выдаваемого датчиком усилия 112, установленным на свободном конце отдаленного рычага 14 шарнирного механизма 10. Как отмечалось выше, эти средства моторизации предпочтительно применяются в электровозном пантографе, как показано на фиг.6. Показанный на фиг.6 пантограф соответствует пантографу, показанному на фиг.3 и 4. В данном частном примере электровозный пантограф содержит элерон 82, аналогичный описанному выше. Предпочтительно кривошип 108 жестко соединен во вращении с элероном, то есть с рычагами 86, которые жестко соединены во вращении с выходной осью 22 стабилизатора 18.
Применение такого сервопривода предназначено для решения проблемы разъединения систем, создающих силы давления на контактный провод 74, и влияния на инерцию конструкции пантографа. Тем самым компенсируется влияние изменений параллельности между контактным проводом и железнодорожным путем, независимо от того, возникают ли они по причине самой геометрии железнодорожной линии или по причине колебаний, возникающих на контактном проводе при прохождении первого пантографа и действующих на следующие за ним другие пантографы в случае их наличия.
Эти сервоприводные средства моторизации в данном примере установлены на механическом стабилизаторе 18. Такой механический стабилизатор неизбежно генерирует синусоидальный момент, на 98% уравновешивающий массу конструкции. В случае пантографа достигнутая кинематика тоже обеспечивает генерирование усилия на контактный провод с такой же точностью, причем независимо от положения развертывания конструкции пантографа. Кроме того, малые значения инерции и трения стабилизатора, а также его повышенная полоса пропускания позволяют успешно его применять со средствами моторизации такого типа.
Конструкция пантографа вокруг стабилизатора 18 позволяет компенсировать в очень хороших условиях изменения всевозможных действующих на нее горизонтальных усилий. В результате этого отношение между приводным механизмом и создаваемым им усилием на дуговые токоприемники практически не зависит от скорости поезда, от направления движения пантографа и его высоты развертывания.
Средства моторизации 90 в основном обеспечивают компенсацию усилий инерции при вертикальном перемещении конструкции. Эти средства моторизации обладают очень хорошими динамическими характеристиками. Они могут даже, в случае необходимости, компенсировать остаточные усилия, возникающие, например, при прохождении через воздух пантографа, предпочтительно во взаимодействии с описанным выше элероном 82. По этой причине в пантографе эти средства моторизации предпочтительно применяют в комбинации с элероном, как показано на фиг.6. Кроме того, эти средства моторизации могут точно так же компенсировать, в случае необходимости, полностью или часть уравновешивания или генерировать полностью или часть усилий дуговых токоприемников на контактный провод.
В соответствии с настоящим изобретением кинематическая цепь сервопривода является моноэнергетической. В результате этого, независимо от положения пантографа механический выигрыш между крутящим моментом и линейным ускорением дуговых токоприемников остается практически постоянным.
Такой кинематики достигают путем воссоздания кривошипно-шатунной системы (кривошип 108), преобразующей постоянное усилие в синусоидальный момент, который опять преобразуется в постоянное усилие конструкцией пантографа на уровне дуговых токоприемников 76 и 78.
В этих условиях синусоида кривошипа 108 синхронизируется по фазе с синусоидой пантографа.
Редуктор 98 (фиг.5) предпочтительно выполняют в виде редуктора с зубчатой передачей с передаточным числом, обратным передаточному отношению между конструкцией пантографа и кривошипом (кривошип 108) средств моторизации.
Червячный винт 102 предпочтительно является червяком реверсивного типа с высоким обратным коэффициентом полезного действия. Для этого предпочитают использовать винт с шариками и с круглыми витками, предпочтительно винт диаметром 30 мм и с шагом витка 30 мм.
В представленном примере винт является реверсивным, потому необходимо наличие редуктора. Но, как вариант, можно использовать винт с меньшим шагом витка без редуктора, но в этом случае его обратный КПД будет меньше.
Сцепление 100 позволяет отключать средства моторизации 90, например, в случае их поломки для обеспечения обратного перемещения пантографа. Это значит, что в таком режиме работы характеристики пантографа будут идентичными характеристикам пантографа без сервопривода.
Далее со ссылкой на фиг.7 следует описание примера сервоприводных средств 110. На фиг.7 показан двигатель 94 и тахометрический генератор 96. Приводимый в движение тахиметрический генератор выдает сигнал скорости SV.
Схема 110 содержит первый операционный усилитель 114 (контур скорости), принимающий этот сигнал скорости SV и выдающий первый выходной сигнал S1, поступающий на второй операционный усилитель 116 (контур тока). Этот второй операционный усилитель выдает второй выходной сигнал S2, который принимается усилителем мощности 118, подающим выходной ток CS на электродвигатель 94, и символ этого тока подается на второй операционный усилитель 116. Датчик усилия 112 (установленный на дуговых токоприемниках пантографа) выдает командный сигнал SC, поступающий на вход второго операционного усилителя 116.
Таким образом управление усилием между дуговым токоприемником и контактным проводом осуществляется на уровне контура тока сервопривода (операционный усилитель 116). Этим обеспечивается очень короткое время срабатывания комплекса и управление абсолютно однородными величинами, так как создаваемый двигателем 94 момент пропорционален командному сигналу этого контура.
Кроме того, предусмотрен блок развертывания и свертывания 120, принимающий командный сигнал SRD, поступающий на первый операционный усилитель (контур скорости), для осуществления развертывания и свертывания шарнирного механизма 10, в данном случае пантографа.
Кроме того, в случае обрыва контактного провода предохранительное устройство 122 выдает экстренный сигнал SU. Этот экстренный сигнал подается предохранительным устройством для свертывания конструкции пантографа в том или ином из следующих случаев (приведены в качестве примера): длительное отсутствие усилия между дуговыми токоприемниками и контактным проводом в рабочей фазе;
- несвоевременное перемещение конструкции в верхнюю точку;
- длительное отсутствие питающего тока электровоза;
подача экстренного сигнала любой другой системой обнаружения.
В некоторых случаях возникает потребность внесения поправки между сигналом SC, выдаваемым датчиком усилия, и реальным усилием, которым дуговые токоприемники действуют на контактный провод. Она позволяет учитывать силы инерции механических частей, расположенных за датчиком, в частности, дуговых токоприемников. Для этого применяют средства коррекции 124, выполненные с возможностью внесения поправки между командным сигналом SC, выдаваемым датчиком усилия 112, и реальным усилием, действующим на груз F, в данном случае на контактный провод. Эти средства коррекции содержат деривационные средства, выполненные с возможностью отвода по отношению ко времени значений изменений скорости, снимаемых с тахиметрического генератора 96, и подавать их на вход второго операционного усилителя 116. Этот сигнал, линейный при ускорении, создает ток, а следовательно, момент, обеспечивающий компенсирование определенных выше усилий инерции, пропорциональных указанному ускорению.
Сервоприводная система, применяемая в качестве вспомогательной для свертывания или развертывания конструкции, как уже указывалось, дублируется другой системой, обеспечивающей свертывание пантографа в случае отказа первой системы, например, при помощи вспомогательных средств моторизации 40, показанных на фиг.2.
Следует учитывать, что описанные выше сервоприводные средства моторизации могут применяться в комбинации с другими средствами уравновешивания. Кроме того, их применение не ограничивается шарнирным механизмом типа электровозного пантографа.
Для лучшего понимания чертежа (фиг.6) сервоприводную систему моторизации расположили вертикально на оси, на которой установлен элерон. На практике и с учетом сокращения габаритов эту систему моторизации можно устанавливать на любой из двух выходных осей стабилизатора горизонтально рядом с последним.
Необходимо отметить, что объект настоящего изобретения может иметь много вариантов применения, в частности, для манипуляторов, погрузочно-разгрузочных устройств, электровозных пантографов и т.д.
Средства уравновешивания устройства в соответствии с настоящим изобретением предпочтительно содержат стабилизатор, описанный в вышеупомянутом французском патенте 8802423.
Разумеется, что существует возможность использования других средств уравновешивания, если они обладают высокой полосой пропускания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАЖИМНОЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ АВТОНОМНУЮ СИСТЕМУ КОМПЕНСАЦИИ | 2006 |
|
RU2412044C2 |
| ЗАЖИМНЫЙ ИНСТРУМЕНТ, В ЧАСТНОСТИ ЭЛЕКТРОДЕРЖАТЕЛЬ, С КОМПЕНСАЦИОННОЙ СИСТЕМОЙ | 2005 |
|
RU2356717C2 |
| УСТРОЙСТВО ДЛЯ РАЗЪЕДИНЕНИЯ БУРОВОЙ КОЛОННЫ, БУРОВАЯ СИСТЕМА, СОДЕРЖАЩАЯ УСТРОЙСТВО ДЛЯ РАЗЪЕДИНЕНИЯ, И ПРИМЕНЕНИЕ ТАКОЙ СИСТЕМЫ | 2011 |
|
RU2551178C2 |
| ТОРМОЗНАЯ СИСТЕМА, СРАБАТЫВАЮЩАЯ ПРИ ОТСУТСТВИИ ТОКА | 2017 |
|
RU2744446C2 |
| ТОКОПРИЕМНИК | 2003 |
|
RU2235650C1 |
| ТОКОПРИЕМНИК | 2003 |
|
RU2321508C1 |
| РАСКРЫВАЕМОЕ КРЫЛО ДВУХСТУПЕНЧАТОЙ РАКЕТЫ | 2011 |
|
RU2478907C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ТОКОСЪЕМНИКА | 2014 |
|
RU2638887C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЕСЕРТА ИЗ СЛИВОЧНОГО МОРОЖЕНОГО, ДЕКОРИРОВАННЫЙ ДЕСЕРТ И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2319389C2 |
| Устройство для контроля нажатия токоприемника на контактный провод | 1984 |
|
SU1240647A1 |
Изобретение относится к устройствам для уравновешивания силы, предназначенным для перемещения груза по заданной траектории. Устройство для уравновешивания силы содержит шарнирный механизм (10), состоящий из ближнего рычага (12), установленного на кронштейне и закрепленного на первой оси вращения (20), и отдаленного рычага (14), установленного на ближнем рычаге и закрепленного на второй оси вращения (24), параллельной первой оси. Отдаленный рычаг имеет свободный конец (26), на котором установлен груз (F). Устройство содержит дополнительно первые средства уравновешивания (18) с повышенной полосой пропускания с выходной осью (20), действующие на ближний рычаг (12), вторые средства уравновешивания с повышенной полосой пропускания со второй выходной осью (22), действующие на отдаленный рычаг (14), а также средства координации с повышенной полосой пропускания, установленные между первыми средствами уравновешивания и вторыми средствами уравновешивания для координации вращательных движений соответственно ближнего рычага и отдаленного рычага. Технический результат заключается в повышении способности реагировать на переходные явления в работе механизма и уменьшении времени его срабатывания. 18 з.п. ф-лы, 7 ил.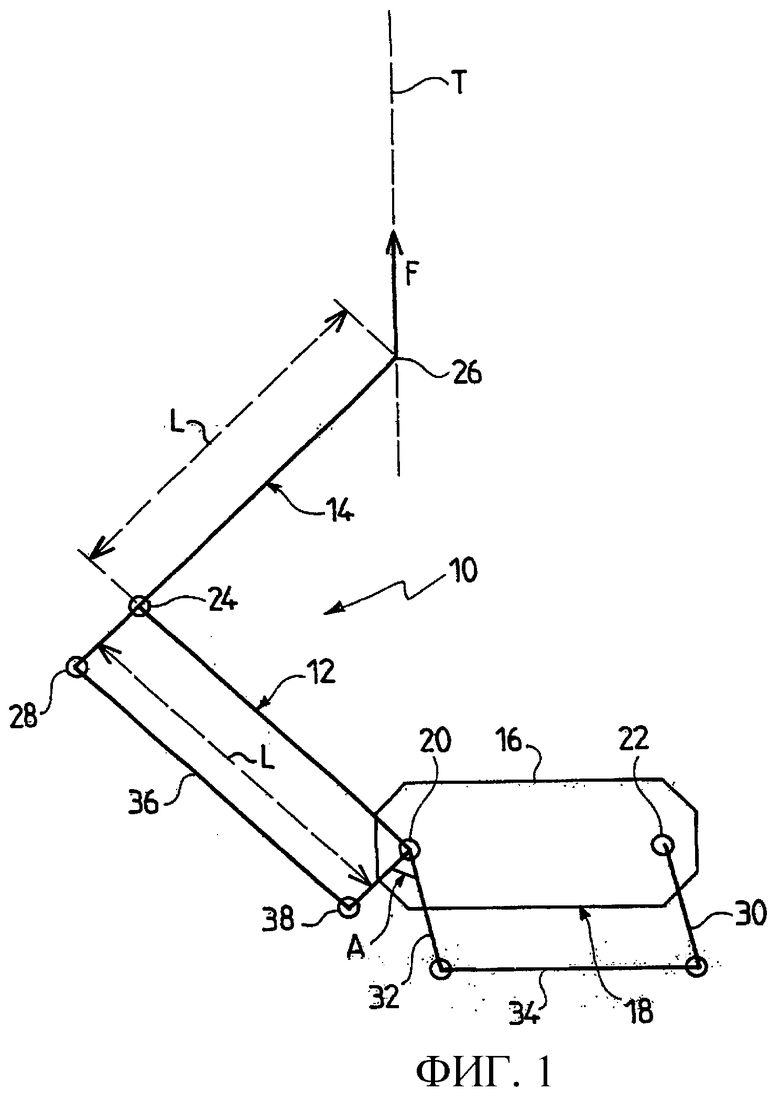
| ТОКОПРИЕМНИК ЭЛЕКТРОПОЕЗДА | 2003 |
|
RU2229987C1 |

