Настоящее изобретение относится к области зажимных инструментов, в частности электрододержателей.
В частности, оно касается зажимного инструмента, содержащего первый орган и второй орган, выполненные с возможностью относительного перемещения под действием приводного устройства, при этом данное устройство содержит винт с заданным шагом, выполненный с возможностью вращения вокруг оси в одном направлении или в противоположном направлении при помощи двигателя; гайку, взаимодействующую с винтом и выполненную с возможностью выполнения поступательного движения в направлении оси винта, при этом упомянутая гайка неподвижно соединена в процессе поступательного движения с первым органом; первые направляющие средства, определяющие линейное направление, параллельное оси винта, для стопорения во вращении гайки в первой фазе перемещения гайки; и вторые направляющие средства, определяющие геликоидальное направление вдоль оси винта с шагом, обратным шагу винта, для обеспечения вращения гайки в том же направлении вращения, что и винта, во второй фазе перемещения гайки.
Из международной публикации WO 02/076665 известен зажимный инструмент такого типа, приводное устройство которого имеет переменное кинематическое соотношение с первой фазой перемещения, в которой гайка стопорится во вращении, и со второй фазой перемещения, в которой гайка приводится во вращение в том же направлении, что и винт, что позволяет уменьшить видимый шаг винта и, следовательно, скорость поступательного движения гайки в этой второй фазе перемещения.
В предпочтительном варианте выполнения этот известный зажимный инструмент выполняют в виде электрододержателя, в котором первый орган (называемый также «подвижным органом») является электродом, тогда как второй орган (называемый также «неподвижным органом») является контрэлектродом.
В этом частном варианте применения электрододержателя в работе приводного устройства могут происходить перебои из-за постепенного износа электродов. Действительно, когда такой электрододержатель используют для сварки листового железа, точка приложения электрода к листу зависит от переменных положений гайки по отношению к направляющим средствам, обеспечивающим осевое направление и геликоидальное направление. Может случиться, например, что гайка направляется вторыми направляющими средствами преждевременно (геликоидальное направление), в результате чего фаза замедления наступает слишком рано, тогда как расстояние, разделяющее концы изношенных электродов, является слишком большим.
Обычно данный недостаток проявляется в таких зажимных инструментах, идет ли речь об электрододержателях или других приспособлениях, поэтому периодически приходится осуществлять регулировку взаимного положения первого органа и второго органа.
Задачей настоящего изобретения является устранение этого недостатка.
В этой связи предлагается компенсационная система, установленная между первым органом и подвижным кронштейном, неподвижно соединенным с гайкой, для восстановления исходного положения этого первого органа относительно второго органа таким образом, чтобы первая и вторая фазы перемещения, реализуемые первым и вторым направляющими средствами, оставались синхронными с фазами, необходимыми для оптимизации перемещения первого органа.
Таким образом, данная компенсационная система позволяет периодически восстанавливать или регулировать положение гайки по отношению к первому органу и, в частности, положение, в котором гайка отходит от первых направляющих средств, определяющих линейное направление, и подходит к вторым направляющим средствам, определяющим геликоидальное направление.
В предпочтительном варианте осуществления настоящего изобретения компенсационная система содержит подвижный кронштейн, выполненный в виде трубчатого элемента, неподвижно соединенного с гайкой и содержащего наружную резьбу, а также ступицу с внутренней резьбой, взаимодействующей с наружной резьбой трубчатого кронштейна, при этом на данной ступице устанавливают первый орган при помощи упорного шарикоподшипника.
Предпочтительно зажимный инструмент содержит средства позиционирования для селективной установки ступицы в одно из трех положений:
- нормальное положение («положение А»), в котором ступица неподвижно соединена в поступательном движении и во вращении с подвижным кронштейном;
- положение восстановления («положение В»), в котором ступица неподвижно соединена в поступательном движении и во вращении с первым органом;
- промежуточное положение («положение С»), в котором ступица свободна, за исключением ее соединения с упорным шарикоподшипником и резьбового соединения с подвижным кронштейном.
Можно предусмотреть различные формы выполнения средств позиционирования.
В варианте выполнения, приведенном в качестве примера, эти средства позиционирования содержат круглую гайку, неподвижно соединенную во вращении со ступицей, свободно перемещающуюся в осевом поступательном движении относительно ступицы и содержащую внутреннюю резьбу для взаимодействия с наружной резьбой трубчатого кронштейна; пружину, выполненную с возможностью отвода круглой гайки от конца ступицы; плунжерные сердечники, неподвижно соединенные с подвижным диском и проходящие через площадку, входящую в состав первого органа; и катушку, установленную на площадке и выполненную с возможностью перемещения при подаче на нее электрического питания круглой гайки к концу ступицы и подвижного диска, неподвижно соединенного с плунжерными сердечниками, к круглой гайке, преодолевая сопротивление возвратного органа, действующего на плунжерные сердечники.
В предпочтительном варианте выполнения предусматривают, чтобы:
- в нормальном положении («положение А») на катушку электрический ток не поступал, при этом круглая гайка удалена от конца ступицы, обеспечивая, таким образом, стопорение ступицы на подвижном кронштейне;
- в положении восстановления («положение В») на катушку подается электрическое питание, при этом круглая гайка входит в контакт с концом ступицы, и подвижный диск входит в контакт с круглой гайкой, обеспечивая, таким образом, стопорение ступицы на площадке и, следовательно, на первом органе;
- в промежуточном положении («положение С») на катушку подается электрическое питание, при этом круглая гайка входит в контакт с концом ступицы, тогда как подвижный диск приближается к круглой гайке, не входя с ней в контакт, поскольку плунжерные сердечники удерживаются в промежуточном положении, при этом ступица остается свободной, за исключением ее соединения с упорным шарикоподшипником и резьбового соединения с подвижным кронштейном.
Предпочтительно зажимный инструмент содержит неподвижный кронштейн, на котором устанавливают двигатель и второй орган, называемый «неподвижным органом».
Согласно другому отличительному признаку настоящего изобретения зажимный инструмент содержит стойку, закрепленную на неподвижном кронштейне и выполненную в направлении, параллельном оси вращения винта, обеспечивая направление поступательного движения подвижного кронштейна, на котором установлен первый орган, называемый «подвижным органом».
Согласно еще одному отличительному признаку настоящего изобретения зажимный инструмент содержит полый цилиндрический кронштейн, который имеет цилиндрическую стенку с центром на оси вращения винта, в которой вырезаны два противоположных друг другу полозка, каждый из которых образует первые и вторые направляющие средства, по которым перемещаются соответственно два элемента-повторителя, установленные на гайке.
В предпочтительном варианте выполнения настоящего изобретения зажимный инструмент выполнен в виде электрододержателя, в котором первый орган и второй орган соответственно являются электродом и контрэлектродом.
Вместе с тем зажимный инструмент в соответствии с настоящим изобретением находит применение и в других областях, например для управления тормозными колодками автомобильных дисковых тормозов.
Далее приводится описание в виде неограничивающих примеров осуществления со ссылками на прилагаемые чертежи.
Фиг. 1 изображает вид спереди с частичным вырезом зажимного инструмента из предшествующего уровня техники.
Фиг. 2 - часть устройства, показанного на фиг. 1 и претерпевшего изменение для включения компенсационной системы в соответствии с настоящим изобретением.
Фиг. 3 - вид зажимного инструмента, оборудованного компенсационной системой в соответствии с настоящим изобретением, при этом средства позиционирования показаны в нормальном положении (положение А).
Фиг. 4 и 5 изображают частичный вид в увеличенном масштабе устройства, показанного на фиг. 3, со средствами позиционирования, находящимися соответственно в положении восстановления (положение В) и в промежуточном положении (положение С).
Зажимный инструмент, показанный на фиг. 1, описан в вышеупомянутой международной публикации WO 02/076665, к которой можно обратиться для более полной информации.
Зажимный инструмент оборудован зажимным устройством, содержащим винт 10, выполненный с возможностью вращения вокруг оси ХХ при помощи электрического двигателя М, который может быть соединен с цифровым устройством управления.
Этот винт имеет большой шаг Р хода и может вращаться в одном или другом направлении двигателем М. Винт 10 взаимодействует с гайкой 12, выполненной с возможностью поступательного движения в направлении оси ХХ винта. Эта гайка неподвижно соединена с кронштейном 14, называемым также «подвижным кронштейном», выполненным в данном случае в виде трубчатого элемента, охватывающего по меньшей мере частично винт 10. Кронштейн 14 соединен с площадкой 16, на которой установлен первый орган 18 (называемый также «подвижным органом»), выполненный с возможностью поступательного перемещения в направлении, параллельном оси ХХ, приближаясь или удаляясь от второго органа 20 (называемого также «неподвижным органом»), установленного на неподвижном кронштейне 22, на котором также установлен двигатель М. На неподвижном кронштейне 22 установлена стойка 24, выполненная в направлении, параллельном оси ХХ, и обеспечивающая направление поступательного движения подвижного кронштейна 14, на котором установлен подвижный орган 18. Для этого в площадке 16 выполнено осевое отверстие 26, через которое проходит стойка 24.
В частном примере выполнения, в котором зажимный инструмент является электрододержателем, подвижный орган 18 и неподвижный орган 20 являются соответственно электродом и контрэлектродом.
В примере выполнения шаг Р1 винта 10 является шагом правой резьбы, значение которого предпочтительно примерно равно величине его собственного диаметра. Гайка 12 оборудована парой роликов 28, образующих элементы-повторители, установленные с возможностью вращения вокруг оси YY, перпендикулярной к оси ХХ винта. На фиг. 1 показан только один из двух роликов 28.
На неподвижном кронштейне 22 установлен полый цилиндрический кронштейн 30, называемый также полой втулкой, содержащий цилиндрическую стенку 32, в которой вырезаны два противоположных друг другу полозка 34 (на фиг. 1 показан только один из двух полозков). Вышеупомянутые ролики 28 выполнены с возможностью качения соответственно в двух полозках 34, которые образуют направляющие средства. Каждый из полозков 34 содержит линейную часть 34L, выполненную параллельно оси винта для обеспечения линейного направления гайки 12, а также геликоидальную часть 34Н, сопрягающуюся с линейной частью 34L для обеспечения геликоидального направления. Эта геликоидальная часть выполнена вокруг оси ХХ винта и имеет шаг Р2, являющийся обратным по отношению к шагу Р1 винта, то есть шагом левой резьбы в данном примере. Пока ролики 28 остаются в контакте с частями 34L полозков, последние не дают гайке вращаться и она может перемещаться поступательно с линейной скоростью, задаваемой угловой скоростью двигателя и шагом Р1 винта. Это и составляет первую фазу перемещения D1, которую называют также ходом и которую можно квалифицировать как инерциальную фазу.
При приближении к точке затягивания, то есть когда ролики 28 соответственно приближаются к геликоидальным частям 34Н, последние заставляют гайку вращаться в том же направлении, что и винт. В результате линейная скорость гайки снижается и может стать равной нулю. Действительно, это происходит в результате видимого изменения шага (по сути дела линейная скорость гайки синхронизирована на шаге Р2). Необходимо отметить, что этот шаг Р2 может быть постоянным или переменным.
Следовательно, если предположить, что винт 10 приводится во вращение вокруг своей оси с установившейся постоянной угловой скоростью, гайка сначала перемещается (в направлении затягивания) с постоянной скоростью для фазы D1 (инерциальная фаза), а затем с более низкой скоростью во второй фазе D2.
В зажимном устройстве, известном из предшествующего уровня техники, кронштейн 14 соединен с площадкой 16 подвижного органа 18 при помощи упорного шарикоподшипника, обозначенного общей позицией 36, через который подвижный кронштейн 14 постоянно остается неподвижно соединенным в поступательном движении с подвижным органом 18. Этот упорный шарикоподшипник 36 содержит два контрфланца 38, соответственно расположенных по обе стороны от площадки 16 и опирающихся на нее через шарики 40. Эти два контрфланца 38 удерживаются в осевом направлении между фланцем 42, выполненным на одном конце подвижного кронштейна 14, и гайкой 44, завинченной на другом конце подвижного кронштейна 14.
Устройство, известное из предшествующего уровня техники, имеет недостаток, упомянутый в преамбуле описания, а именно то, что оно не может компенсировать смещение, возникающее между органами 18 и 20, особенно когда этими органами являются постепенно изнашивающиеся электроды.
Настоящее изобретение позволяет устранить этот недостаток путем замены показанного на фиг. 1 упорного шарикоподшипника 36 на компенсационный механизм, который будет описан далее со ссылкой на фиг. 2.
Показанная на фиг. 2 компенсационная система 46 установлена между первым органом 18 и подвижным кронштейном 14 (неподвижно соединенным с гайкой 12) для восстановления первоначального положения первого органа 18 по отношению к второму органу 20 таким образом, чтобы первая и вторая фазы перемещения D1 и D2, реализуемые первым и вторым направляющими средствами 34L и 34Н, оставались синхронными с фазами, необходимыми для оптимизации перемещения первого органа 18.
В данном примере компенсационная система 46 содержит подвижный кронштейн 14, который выполнен в виде трубчатого элемента, неподвижно соединенного с гайкой 12 и содержащего наружную резьбу 48. Кроме того, компенсационная система 46 содержит ступицу 50, содержащую внутреннюю резьбу 52, предназначенную для взаимодействия с наружной резьбой 48 подвижного кронштейна 14. На этой ступице 50 установлен первый орган 18 при помощи упорного шарикоподшипника 54, выполненного в виде упора двойного действия и содержащего площадку 16 и два контрфланца 56 и 58, опирающихся на площадку через шарики 60. Эти два контрфланца удерживаются в осевом направлении между фланцем 62, выполненным на одном конце ступицы 50, и гайкой 64, завинченной вокруг другого конца ступицы.
Компенсанционная система 46 обеспечивает с частотой, определяемой в зависимости от работы зажимного инструмента, восстановление первоначального положения подвижного органа 18 по отношению к неподвижному органу 20 таким образом, чтобы различные фазы движения, реализуемые направляющими средствами цилиндрического кронштейна 30 (полая втулка), оставались синхронными с фазами движения, необходимыми для оптимизации движения подвижного органа 18.
Эта компенсационная система обеспечивает относительное продольное перемещение органа 18 по отношению к органу 20, чтобы компенсировать изменения промежутка между ними. Это представляет особый интерес, когда подвижный орган 18 и неподвижный орган 20 соответственно являются электродом и контрэлектродом, для компенсации их суммарного износа.
В примере выполнения, который будет описан ниже, средства позиционирования позволяют селективно устанавливать ступицу 50 в одно из трех следующих положений:
- нормальное положение (положение А), в котором ступица 50 неподвижно соединена в поступательном движении и во вращении с подвижным кронштейном 14;
- положение восстановления (положение В), в котором ступица 50 неподвижно соединена в поступательном движении и во вращении с первым органом 18;
- промежуточное положение (положение С), в котором ступица 50 свободна, за исключением ее соединения с упорным шарикоподшипником 54 и резьбового соединения с подвижным кронштейном 14.
В нормальном положении А компенсационная система 46, показанная на фиг. 2, работает идентично узлу, образованному упорным шарикоподшипником 36, показанным на фиг. 1. Таким образом, в данном случае речь идет о нормальной работе инструмента.
В положении восстановления В работа происходит следующим образом. Во время фазы перемещения D1, в которой ролики 28 перемещаются в линейных частях 34L ползунков, в компенсационной системе не происходит ничего, поскольку подвижный кронштейн 14 не вращается и площадка 16 перемещается поступательно так же, как в нормальном положении А.
Когда каждый из роликов 28 заходит в геликоидальную часть 34Н соответствующего ползунка, подвижный кронштейн 14 начинает вращаться, тогда как ступица 50, заблокированная во вращении площадкой 16, начинает передвигаться на подвижном кронштейне 14 в направлении стрелки F. Это движение, накладывающееся на движение, порождаемое геликоидальными частями 34 ползунков, компенсирует, таким образом, увеличение промежутка между органами 18 и 20, при этом данное увеличение промежутка происходит в результате износа, когда органы 18 и 20 соответственно являются электродом и контрэлектродом. Остановка движения происходит при вступлении в контакт органов 18 и 20 с калибровочной колодкой (на чертеже не показана) и даже непосредственно друг с другом.
Эта компенсационная система, реальное движение которой зависит от относительной величины шага резьбы 48 между подвижным кронштейном 14 и ступицей 50 и от шага геликоидальных частей 34Н ползунков 34, требует для каждого случая использования определять толщину калибровочной колодки и периодичность восстановления первоначального положения. В идеале эта операция должна осуществляться одним закрытием зажимного инструмента и в один прием перед его использованием. Следует отметить, что приведение во вращение подвижного кронштейна 14 только в конце фазы D1 позволяет избежать после восстановления первоначального положения зажима на этом этапе.
Очевидно, что если восстановление не может быть произведено одной манипуляцией (например, если ролики 28 опускаются на дно ползунков до того, как органы 18 и 20 соприкоснутся друг с другом или войдут в контакт с калибровочной колодкой), то можно произвести вторую манипуляцию.
Вместе с тем необходимо отметить, что ролики 28 и геликоидальные части 34Н ползунков вызывают вращение подвижного кронштейна 14 в одном направлении при закрытии и в другом направлении при открытии, поэтому в положении В ступица 50 будет перемещаться в направлении стрелки F при закрытии и в обратном направлении при открытии.
Это значит, что любое открытие зажимного инструмента, которое следует за восстановлением, будь то в результате одной операции или нескольких операций, должно происходить в положении А, чтобы ступица 50 не осуществляла при закрытии и повторном открытии взаимно компенсирующих циклов.
Необходимо отметить, что компенсационная система позволяет также производить повторную калибровку, например, после смены электродов или испытательную регулировку, в частности, для проведения испытаний с использованием датчика напряжений. Эти операции предпочтительно осуществлять, перемещая вручную ступицу 50 в положение С перед возвратом к положению А для испытаний.
В частном случае, когда органы являются электродами, возможность автоматической смены электродов потребует раздвинуть их кронштейны с учетом того, что новые электроды являются более длинными. Это раздвигание можно осуществить, используя положение В в фазе открытия зажимного инструмента. Затем осуществляют восстановление первоначального положения при помощи описанного выше цикла. Этот процесс можно применять для любой смены электродов вручную или для любой другой операции.
Наконец, в случае небольшого шага винта между подвижным кронштейном 14 и ступицей 50 можно допустить, что необратимости системы винт-гайка достаточно для неподвижного соединения двух деталей между собой в положении А.
Согласно фиг. 3, компенсационная система 46 показана со средствами позиционирования, содержащими круглую гайку 66, неподвижно соединенную во вращении со ступицей 50 при помощи осевых шплинтов 68, выступающих из конца 70 ступицы и заходящих в соответствующие отверстия 72 круглой гайки. Таким образом, эта круглая гайка выполнена с возможностью свободного осевого поступательного перемещения относительно ступицы в пределах зазоров различных ниток резьбы соответствующих деталей. Она содержит внутреннюю резьбу, предназначенную для взаимодействия с наружной резьбой 48 подвижного кронштейна 14. Пружина 74, в данном случае выполненная геликоидальной, заходит в полость ступицы 50 и выполнена с возможностью отвода круглой гайки 66 от конца 70 ступицы. В данном случае, в отличие от варианта выполнения, показанного на фиг. 2, соответствующие положения на фиг. 2, соответствующие положения фланца 62 и гайки 64 изменены на противоположные. Иначе говоря, фланец 62 находится на нижнем конце ступицы 50, а гайка 64 - на верхнем конце ступицы 50 (на чертеже). Таким образом, фланец 62 образует конец 70 ступицы.
Узел, образованный круглой гайкой 66 и ступицей 50, работает как обратная система гайка-контргайка, а именно, когда круглая гайка 66 прижата к ступице 50, узел ведет себя как единичная гайка, вращающаяся без напряжения на резьбе 48 подвижного кронштейна 14. Когда круглая гайка 66 отходит от ступицы 50 под действием усилия пружины 74, круглая гайка 66 и ступица 50 создают напряжение на нитках резьбы, которое неподвижно соединяет их с подвижным кронштейном 14. Для нормальной работы системы внутреннюю резьбу круглой гайки 66 выполняют со значительным зазором.
Средства позиционирования дополнительно содержат плунжерные сердечники 78, неподвижно соединенные с подвижным диском 76 и проходящие через площадку 16, входящую в состав подвижного органа. На этой площадке установлена катушка 80 (состоящая из нескольких обмоток), выполненная таким образом, чтобы при подаче на нее электрического питания перемещать круглую гайку 66 к концу 70 ступицы 50 (то есть к фланцу 62) и подвижный диск 76, неподвижно соединенный с плунжерными сердечниками 78, к круглой гайке 66, преодолевая усилие возвратного органа 82, действующее на плунжерные сердечники. В данном примере этот возвратный орган образован дисками тарельчатой пружины. Плунжерные сердечники проходят через соответствующие отверстия, выполненные в кольце 84, закрепленном между возвратным органом 82 и гайками 86, завинченными соответственно на плунжерных сердечниках 78.
В нормальном положении А на катушку 80 электрическое питание не подается, при этом круглая гайка 66 отстоит на расстоянии от конца 70 ступицы, обеспечивая, таким образом, стопорение ступицы на трубчатом кронштейне 14. В этом случае существует промежуток или промежуточное пространство Е1 между круглой гайкой 66 и подвижным диском 76 (фиг. 3).
В положении восстановления В (фиг. 4) на катушку 80 подается электрическое питание, при этом круглая гайка 66 входит в контакт с концом 70 ступицы 50, а подвижный диск 76 входит в контакт с круглой гайкой 66, обеспечивая, таким образом, стопорение ступицы 50 на площадке 16 и, следовательно, на первом органе 18. Возвратный орган 82 при этом сжимается под действием тягового усилия, создаваемого плунжерными сердечниками 78. В этом случае существует промежуток или промежуточное пространство Е2 между подвижным диском 76 и катушкой 80 (фиг. 4).
В промежуточном положении С (фиг. 5) на катушку 80 подается электрическое питание, при этом круглая гайка 66 входит в контакт с концом 70 ступицы 50, тогда как подвижный диск 76 приближается к круглой гайке 66, не входя с ней в контакт, так как плунжерные сердечники 78 удерживаются в промежуточном положении, при этом ступица остается свободной, за исключением ее соединения с упорным шарикоподшипником и резьбового соединения с подвижным кронштейном 14. Это удержание в промежуточном положении можно обеспечить, вставив соответствующую колодку 88 между площадкой 16 и кольцом 84. Колодка 88 определяет это промежуточное положение и препятствует контакту между подвижным диском 76 и круглой гайкой 66 и, следовательно, их неподвижному соединению. В этом случае существует промежуток или промежуточное пространство Е3 между круглой гайкой 66 и подвижным диском 76 (фиг. 5), которое меньше, чем промежуток или промежуточное пространство Е1 (фиг. 3).
Изобретение в основном применяется для зажимных инструментов, в частности, для электрододержателей, а также для других видов устройств, например для дисковых тормозных систем или для запорных устройств прессов для литья под давлением.
В целом оно может применяться всякий раз, когда перемещения по оси требуют значительных изменений механических характеристик (усилий и скоростей), причем как со специфичным износом входящих в контакт деталей, так и без него.
Реализацию системы компенсации износа и ее трех положений А, В и С можно осуществлять также с помощью вспомогательных автоматизированных средств или любой другой автоматической или ручной системы.
Состояние износа органов 18 и 20 можно измерять постоянно путем контроля за углом вращения подвижного кронштейна 14. Это измерение, осуществляемое в режиме реального времени, в большинстве случае приводит к необходимости корректировки во время перерыва.
Изобретение относится к зажимному инструменту и может найти применение в различных отраслях машиностроения. Зажимный инструмент содержит первый орган (18) и второй орган (20), выполненные с возможностью относительного перемещения под действием приводного устройства. Устройство содержит винт (10) с заданным шагом, выполненный с возможностью вращения вокруг оси (XX) в одном или противоположном направлении при помощи двигателя (М), и гайку (12), взаимодействующую с винтом (10) и выполненную с возможностью поступательного движения в направлении оси (XX) винта. Гайка (12) жестко соединена и движется поступательно с первым органом (18). Первые направляющие средства (34L) определяют линейное направление, параллельное оси (XX) винта, для стопорения во вращении гайки (12) в первой фазе ее перемещения. Вторые направляющие средства (34Н) определяют геликоидальное направление вдоль оси (XX) винта (12) с шагом, обратным шагу винта, для обеспечения вращения гайки (12) в том же направлении вращения, что и винт (10), во второй фазе ее перемещения. Компенсационная система (46) установлена между первым органом (18) и подвижным кронштейном (14), неподвижно соединенным с гайкой (12), для восстановления исходного положения первого органа (18) относительно второго органа (20) таким образом, чтобы первая и вторая фазы перемещения, реализуемые первым и вторым направляющими средствами (34L, 34Н), оставались синхронными с фазами, необходимыми для оптимизации перемещения первого органа. В результате обеспечивается точность регулировки взаимного положения первого и второго органов. 15 з.п. ф-лы, 5 ил.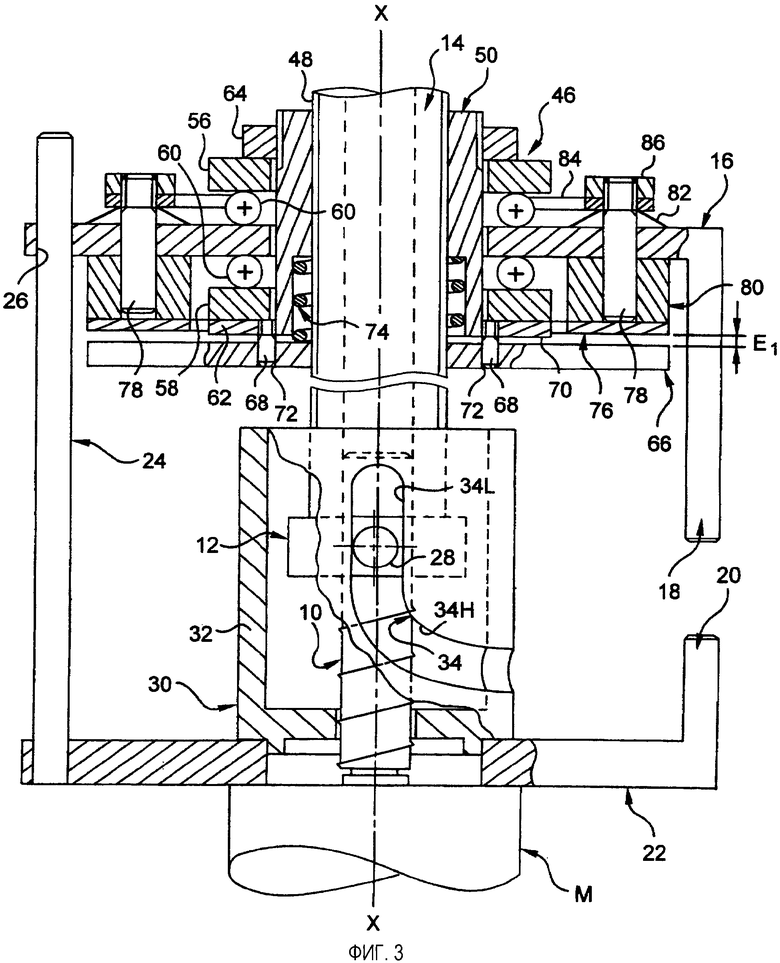
1. Зажимный инструмент, содержащий первый орган (18) и второй орган (20), выполненные с возможностью относительного перемещения под действием приводного устройства, при этом упомянутое устройство содержит винт (10) с заданным шагом (Р1), выполненный с возможностью вращения вокруг оси (XX) в одном направлении или в противоположном направлении при помощи двигателя М, гайку (12), взаимодействующую с винтом (10), выполненную с возможностью поступательного движения в направлении оси (XX) винта и жестко соединенную и поступательно перемещающуюся с первым органом (18), первые направляющие средства (34L), определяющие линейное направление, параллельное оси (XX) винта, для стопорения во вращении гайки (12) в первой фазе перемещения (D1) гайки, и вторые направляющие средства (34Н), определяющие геликоидальное направление вдоль оси (XX) винта (12) с шагом (Р2), обратным шагу (Р1) винта, для обеспечения вращения гайки (12) в том же направлении вращения, что и винт (10), во второй фазе перемещения (D2) гайки, отличающийся тем, что содержит компенсационную систему (46), установленную между первым органом (18) и подвижным кронштейном (14), неподвижно соединенным с гайкой (12), для восстановления исходного положения этого первого органа (18) относительно второго органа (20) таким образом, чтобы первая и вторая фазы перемещения, реализуемые первым и вторым направляющими средствами (34L, 34Н), оставались синхронными с фазами, необходимыми для оптимизации перемещения первого органа.
2. Зажимный инструмент по п.1, отличающийся тем, что компенсационная система (46) содержит подвижный кронштейн (14), выполненный в виде трубчатого элемента, неподвижно соединенного с гайкой (12) и содержащего наружную резьбу (48), а также ступицу (50) с внутренней резьбой, взаимодействующей с наружной резьбой подвижного кронштейна (14), при этом на ступице (50) устанавливают первый орган (18) при помощи упорного шарикоподшипника (54).
3. Зажимный инструмент по п.2, отличающийся тем, что содержит средства позиционирования (66; 76; 80) для селективной установки ступицы (50) в одно из трех положений: нормальное положение («положение А»), в котором ступица (50) неподвижно соединена в поступательном движении и во вращении с подвижным кронштейном (14), положение восстановления («положение В»), в котором ступица (50) неподвижно соединена в поступательном движении и во вращении с первым органом (18), и промежуточное положение («положение С»), в котором ступица (50) свободна и соединена только с упорным шарикоподшипником (54) и с подвижным кронштейном (14) с помощью резьбового соединения.
4. Зажимный инструмент по п.3, отличающийся тем, что средства позиционирования содержат круглую гайку (66), жестко соединенную во вращении со ступицей (50), свободно и поступательно перемещающуюся в осевом направлении относительно ступицы (50) и содержащую внутреннюю резьбу для взаимодействия с наружной резьбой (48) подвижного кронштейна (14), пружину (74), выполненную с возможностью отвода круглой гайки от конца (70) ступицы, плунжерные сердечники (78), неподвижно соединенные с подвижным диском (76) и проходящие через площадку (16), входящую в состав первого органа (18), и катушку (80), установленную на площадке и выполненную с возможностью перемещения при подаче на нее электрического питания круглой гайки (66) к концу (70) ступицы (50) и перемещения подвижного диска (76), неподвижно соединенного с плунжерными сердечниками (78), к круглой гайке (66) с преодолением сопротивления возвратного органа (82), действующего на плунжерные сердечники (78).
5. Зажимный инструмент по п.3 или 4, отличающийся тем, что в нормальном положении («положение А») на катушку (80) электрический ток не поступает, при этом круглая гайка (66) удалена от конца (70) ступицы (50), обеспечивая, таким образом стопорение ступицы на подвижном кронштейне (14), в положении восстановления («положение В») на катушку (80) подается электрическое питание, при этом круглая гайка (66) входит в контакт с концом (70) ступицы (50) и подвижный диск (76) входит в контакт с круглой гайкой (66), обеспечивая таким образом стопорение ступицы (50) на площадке (16) и, следовательно, на первом органе (18), и в промежуточном положении («положение С») на катушку (80) подается электрическое питание, при этом круглая гайка (66) входит в контакт с концом (70) ступицы (50), тогда как подвижный диск (76) приближается к круглой гайке (66), не входя с ней в контакт, поскольку плунжерные сердечники (78) удерживаются в промежуточном положении, при этом ступица (50) остается свободной и соединена только с упорным шарикоподшипником и с подвижным кронштейном (14) с помощью резьбового соединения.
6. Зажимный инструмент по одному из пп.1-4, отличающийся тем, что содержит неподвижный кронштейн (22), на котором устанавливают двигатель (М) и второй орган (20), называемый «неподвижным органом».
7. Зажимный инструмент по п.5, отличающийся тем, что содержит неподвижный кронштейн (22), на котором устанавливают двигатель (М) и второй орган (20), называемый «неподвижным органом».
8. Зажимный инструмент по п.6, отличающийся тем, что содержит стойку (24), закрепленную на неподвижном кронштейне (22) и выполненную в направлении, параллельном оси (XX) вращения винта, обеспечивая направление поступательного движения подвижного кронштейна (14), на котором установлен первый орган (18), называемый «подвижным органом».
9. Зажимный инструмент по п.7, отличающийся тем, что содержит стойку (24), закрепленную на неподвижном кронштейне (22) и выполненную в направлении, параллельном оси (XX) вращения винта, обеспечивая направление поступательного движения подвижного кронштейна (14), на котором установлен первый орган (18), называемый «подвижным органом».
10. Зажимный инструмент по одному из пп.1-4, 7-9, отличающийся тем, что содержит полый цилиндрический кронштейн (30), который имеет цилиндрическую стенку (32) с центром на оси (XX) вращения винта (10), в которой вырезаны два противоположных друг другу полозка (34), каждый из который образует первые и вторые направляющие средства, по которым перемещаются соответственно два элемента-повторителя (28), установленные на гайке (12).
11. Зажимный инструмент по п.5, отличающийся тем, что содержит полый цилиндрический кронштейн (30), который имеет цилиндрическую стенку (32) с центром на оси (XX) вращения винта (10), в которой вырезаны два противоположных друг другу полозка (34), каждый из который образует первые и вторые направляющие средства, по которым перемещаются соответственно два элемента-повторителя (28), установленные на гайке (12).
12. Зажимный инструмент по п.6, отличающийся тем, что содержит полый цилиндрический кронштейн (30), который имеет цилиндрическую стенку (32) с центром на оси (XX) вращения винта (10), в которой вырезаны два противоположных друг другу полозка (34), каждый из который образует первые и вторые направляющие средства, по которым перемещаются соответственно два элемента-повторителя (28), установленные на гайке (12).
13. Зажимный инструмент по одному из пп.1-4, 7, 8, 9, 11 и 12, отличающийся тем, что выполнен в виде электрододержателя, в котором первый орган (18) и второй орган (20) соответственно являются электродом и контрэлектродом.
14. Зажимный инструмент по п.5, отличающийся тем, что выполнен в виде электрододержателя, в котором первый орган (18) и второй орган (20) соответственно являются электродом и контрэлектродом.
15. Зажимный инструмент по п.6, отличающийся тем, что выполнен в виде электрододержателя, в котором первый орган (18) и второй орган (20) соответственно являются электродом и контрэлектродом.
16. Зажимный инструмент по п.10, отличающийся тем, что выполнен в виде электрододержателя, в котором первый орган (18) и второй орган (20) соответственно являются электродом и контрэлектродом.
| ИСКУССТВЕННЫЙ ТАЗОБЕДРЕННЫЙ СУСТАВ "ПРЭТТИ" | 1993 |
|
RU2076665C1 |
| ЗАЖИМНОЕ УСТРОЙСТВО | 1993 |
|
RU2085352C1 |
| СБОРНЫЙ ВАЛОК ПИЛЬГЕРСТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1993 |
|
RU2056958C1 |
| RU 2060133 C1, 20.05.1996 | |||
| УСТРОЙСТВО ДЛЯ СБОРКИ И СВАРКИ | 1995 |
|
RU2078667C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ СОСТОЯНИЯ ПАЦИЕНТА ПОСЛЕ ФИЗИЧЕСКИХ НАГРУЗОК И ДЛИТЕЛЬНЫХ СТАТИЧЕСКИХ ПОЗ | 2003 |
|
RU2261081C2 |
| Чугун | 1982 |
|
SU1057569A1 |
| DE 4417789 A, 29.06.1995 | |||
| JP 5042395 A, 23.09.1993 | |||
| US 4344215 A, 17.08.1982. | |||

