Изобретение относится к зажимному устройству, содержащему систему компенсации для установки в исходное рабочее положение контактирующих деталей, в частности для обеспечения компенсации износа.
В документе FR 2822401 и соответствующей заявке РСТ/FR 02/00444 заявители описали зажимное устройство, которое состоит из приводного устройства с изменяемым механическим усилием.
Это зажимное устройство содержит первый орган и второй орган, способные взаимно перемещаться под действием приводного устройства, содержащего винт с заданным шагом, приводимый во вращение вокруг оси в прямом и обратном направлениях под действием двигателя, гайку, взаимодействующую с винтом и приводимую в действие в направлении оси винта, при этом упомянутая гайка жестко соединена с первым органом при перемещении, первые направляющие средства, обеспечивающие линейное перемещение параллельно оси винта для блокирования вращения гайки в первой фазе ее перемещения, и вторые направляющие средства, обеспечивающие винтовое направление, вдоль оси винта с инверсным шагом относительно шага винта для обеспечения вращения гайки в том же направлении, что и винт во второй фазе перемещения гайки.
Это приводное устройство имеет изменяемое передаточное отношение в первой фазе перемещения, когда вращение гайки блокировано, и во второй фазе перемещения, когда гайка приводится во вращение в том же направлении, что и винт, что позволяет уменьшить мнимый шаг винта, и, следовательно, скорость перемещения гайки во второй фазе перемещения. Предполагая, что винт вращается с постоянной угловой скоростью, скорость перемещения (линейная скорость) гайки будет выше в первой фазе перемещения и уменьшится до практически нулевой во второй фазе перемещения.
В заявке РСТ/FR 05/00306 заявители представили усовершенствование зажимного устройства описанного выше типа, которое заключается в системе компенсации, размещенной между первым органом и подвижной опорой, жестко соединенной с гайкой для повторной установки в исходное положение первого органа относительно второго органа таким образом, чтобы первая и вторая фазы перемещения, вызванные первыми и вторыми направляющими средствами, оставались синхронными с фазами, необходимыми для оптимизации перемещения первого органа.
Система компенсации позволяет также повторно установить в исходное рабочее положение или периодически калибровать положение первого органа по отношению к положению гайки, и, в особенности, положение упомянутого первого органа, когда гайка покидает первые направляющие средства, определяющие линейное направление, для перехода на вторые направляющие средства, определяющие винтовое направление. Таким образом, когда гайка снабжена следящими элементами, такими как шкивы, это позволяет повторно устанавливать в исходное рабочее положение первый орган, когда шкивы покидают линейное направление и переходят на винтовое направление.
Описанное выше известное зажимное устройство может быть выполнено в виде щипцов, например сварочных клещей, либо в виде системы дискового торможения.
Целью изобретения является усовершенствование известного зажимного устройства.
В частности, оно направлено на усовершенствование системы компенсации, описанной в заявке РСТ/FR 05/00306, в связи с тем, что последняя не может компенсировать происходящий со временем сдвиг между первым и вторым органами (особенно когда этими органами являются постепенно уменьшающиеся электроды) без введения второй приводной системы.
Объектом изобретения является зажимное устройство, содержащее первый орган и второй орган, способные осуществлять взаимные перемещения под действием приводного устройства, при этом зажимное устройство содержит винт с заданным шагом, приводимый во вращение вокруг своей оси в прямом и обратном направлениях под действием двигателя, гайку, взаимодействующую с винтом и перемещающуюся по направлению оси винта, причем упомянутая гайка жестко соединена при перемещении с первым органом, первые направляющие средства, определяющие линейные направления, параллельные оси винта для блокирования вращения гайки в первой фазе ее перемещения гайки, и вторые направляющие средства, определяющие винтовое направление вдоль оси винта с шагом, инверсным относительно шага винта, для обеспечения вращения гайки в том же направлении, что и винт во второй фазе перемещения гайки, а также систему компенсации, размещенную между первым органом и подвижной опорой, жестко соединенной с гайкой, для повторной установки в исходное рабочее положение первого органа относительно второго органа таким образом, чтобы первая и вторая фазы перемещения, вызванные первыми и вторыми направляющими средствами, оставались синхронными с фазами, необходимыми для оптимизации перемещения первого органа.
В соответствии с изобретением система компенсации содержит компенсационный диск, жестко соединенный при вращении со ступицей, навинченной на подвижную опору, измерительный диск, установленный на подвижной опоре, посредством механизма свободного хода пружины для накопления энергии, размещенной между выравнивающим диском и измерительным диском таким образом, чтобы запоминание состояния износа деталей являлся конкретизированным благодаря угловому положению относительно измерительного диска и подвижной опоры. В процессе второй фазы перемещения гайки необходимость восполнения износа подтверждается воздействием измерительного диска на подвижный орган до упора, компенсационный диск, таким образом, приводится во вращение ступицей, сжимающей пружину(ы) до окончания движения подвижной опоры.
Так, система компенсации работает полностью автономно без какого-либо внешнего вмешательства. Для осуществления функции восполнения, которая заключается в осуществлении синхронного перемещения изнашиваемых деталей в двух фазах, вызываемых приводным устройством основного зажимного устройства, не используются никакие другие приводные устройства, кроме основного приводного устройства механизма.
Другими характеристиками изобретения, дополнительными или альтернативными, являются следующие:
- механизм свободного хода позволяет осуществлять вращение подвижной опоры в измерительном диске только в одном направлении;
- пружина(ы) рассчитана(ы) для накопления энергии, необходимой при операции восполнения и высвобождения этой энергии, когда уровень напряжения между ступицей и подвижной опорой создает момент сопротивления меньший, чем момент, обеспечиваемый пружиной(ами) в сжатом состоянии, это высвобождение энергии происходит только при вращении выравнивающего диска в связи с тем, что механизм свободного хода препятствует вращению измерительного диска;
- в исключительном случае, если пространство, которое необходимо выполнить, слишком велико, или когда пружина(ы) достигает(ют) максимальной степени сжатия, вращение компенсационного диска и измерительного диска блокируется, вызывая таким образом относительное перемещение между подвижной опорой и ступицей для осуществления фазы восполнения в реальном времени;
- после фазы восполнения в реальном времени, когда уровень напряжения между подвижной опорой и ступицей уменьшится, энергия, запасенная в пружине(ах) перед фазой восполнения в реальном времени, способна сократить указанную фазу восполнения и уменьшить совокупность напряжения, обусловленных кинематикой этой операции.
Изобретение направлено также на усовершенствование зажимного устройства, описанного в FR 2822401 и заявке РСТ/FR 02/00444, которое состоит из приводного устройства с изменяемым механическим усилием. Зажимное устройство, описанное в этих двух публикациях, содержит гайку, которая взаимодействует, с одной стороны, обратимым образом, с винтом, приводимым во вращение мотором, и, с другой стороны, благодаря, по меньшей мере, одному свободному шкиву, установленному на оси, перпендикулярной оси винта, с втулкой, образованной цилиндрической стенкой, концентричной винту, в котором выполнена, по крайней мере, одна винтовая канавка с изменяемым шагом, инверсным по отношению к шагу винта, в которой перемещается шкив.
В этом известном зажимном устройстве привод винта мотором производит продольное перемещение гайки с переменной скоростью в зависимости от шага винтовой канавки, в которой перекатывается шкив.
Воздействие аксиального усилия, а также тот факт, что система винт-гайка является реверсивной, вызывает передачу усилия между шкивом и втулкой, которое уменьшает аксиальное напряжение, испытываемое винтом. Эта передача усилия будет тем более важна, что шаг канавки, выполненный во втулке, меньше, чем шаг винта. Так как шаг канавки может принимать нулевое значение, то отсюда можно понять, что значение усилия между шкивом и втулкой может быть весьма высоким.
Цель изобретения, в том числе, состоит в устранении указанного недостатка.
Оно, в частности, представляет систему, позволяющую передавать повышенное усилие между одним или несколькими шкивами и втулкой, при обеспечении высокой надежности и повышенного уровня отдачи, соответствующих областям использования этой системы (приводное зажимное устройство, электрический тормоз, авиационный несущий винт и т.д.).
Для этого изобретение предлагает шкив с профилем в форме усеченного конуса, в то время как соответствующая контактная поверхность канавки наклонена относительно оси шкива на такую величину, что повышение скорости, вызванное удалением точки контакта между шкивом и канавкой относительно оси винта, будет полностью компенсировано повышением диаметра шкива в зависимости от этого удаления. Таким образом обеспечивается постоянный и однородный контакт между шкивом и поверхностью канавки, который не вызывает никакого вредного скольжения, какими бы ни были относительные значения величин толщины стенки втулки, ее диаметра и диаметра шкива.
Предпочтительно также предусмотреть несколько копланарных шкивов для того, чтобы усилия, которые оказывает на их ось их профиль в форме усеченного конуса, взаимно аннулировались, не оказывая никакого влияния на винт. Можно предусмотреть два шкива через 180°, три шкива через 120° и так далее.
В соответствии с другой характеристикой изобретения в каждом шкиве предусмотрен упор, позволяющий воспринять аксиальное усилие, вызываемое профилем шкива в форме усеченного конуса.
Кроме того, предпочтительно предусмотреть между гайкой и винтом зазор, превышающий величину допустимого отклонения центрирования гайки относительно шкивов для предохранения винта от всех гиперстатических явлений, которым он мог бы быть подвержен.
В дальнейшем изобретение поясняется нижеследующим описанием, приведенным в качестве примера со ссылками на сопровождающие чертежи, на которых:
- фиг.1 изображает вид в частичном разрезе зажимного устройства в соответствии с известным уровнем техники;
- фиг.2 изображает часть зажимного устройства по фиг.1, содержащего систему компенсации из известного уровня техники;
- фиг.3 изображает аналогичный вид по фиг.2, но содержащий систему компенсации по изобретению;
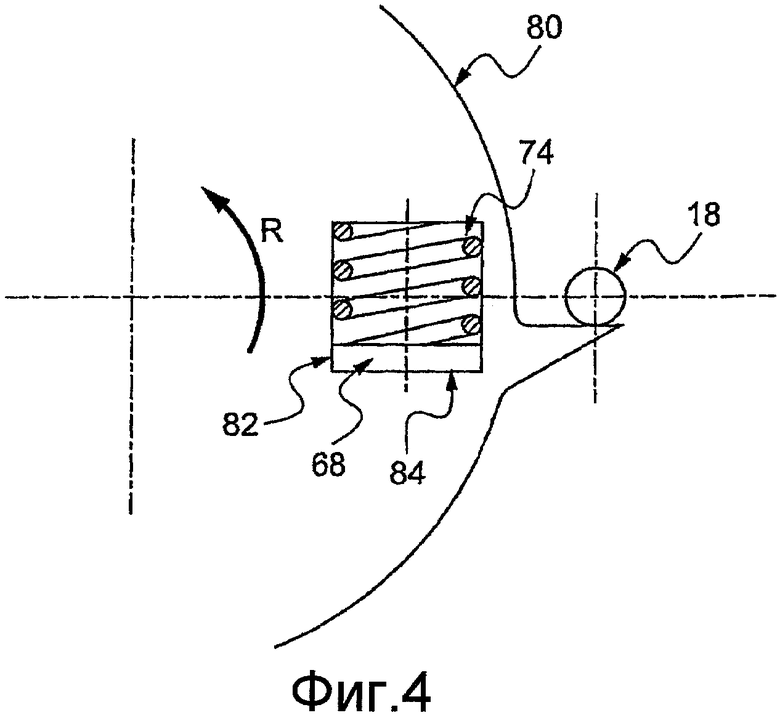
- фиг.4 изображает частичный разрез системы компенсации по стрелке IV на фиг.3;
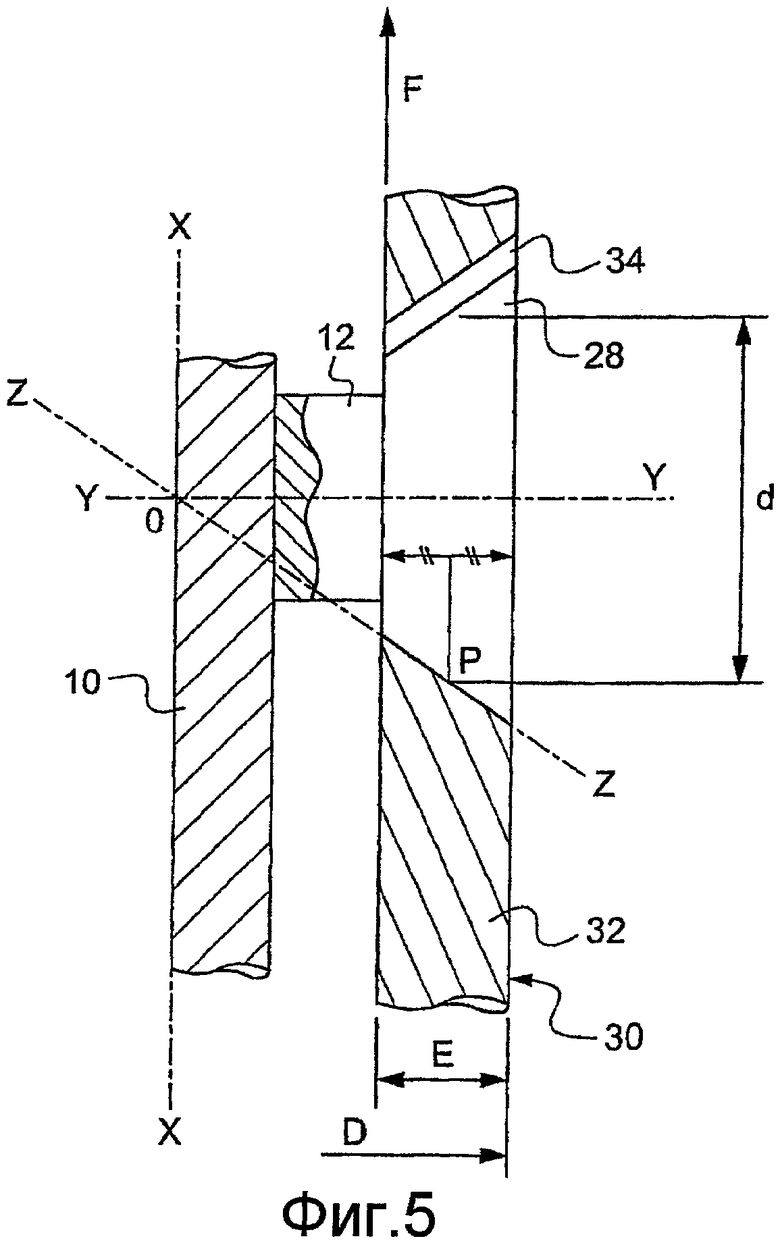
- фиг.5 изображает шкив по изобретению; и
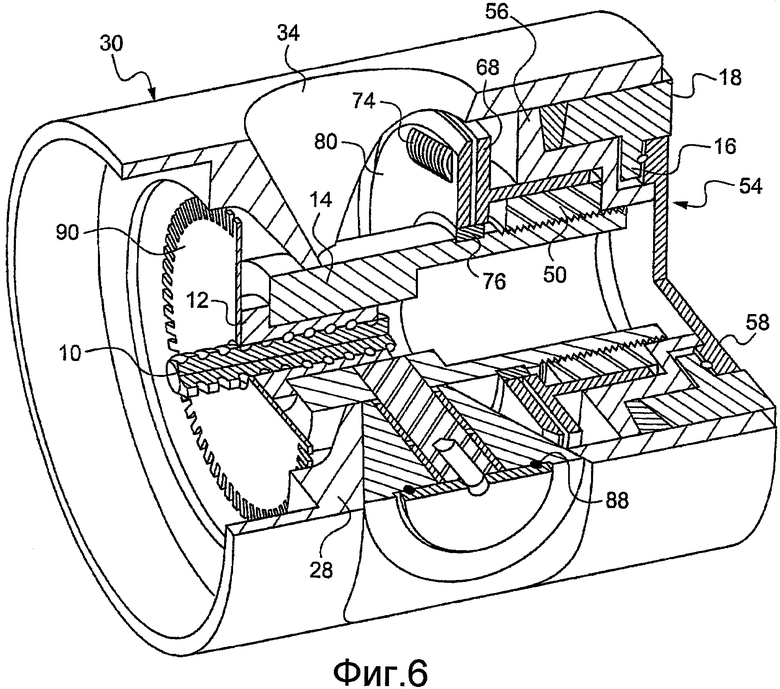
- фиг. 6 изображает вид в аксонометрии с разрезом зажимного устройства по изобретению, включающего улучшенную систему компенсации и улучшенный шкив.
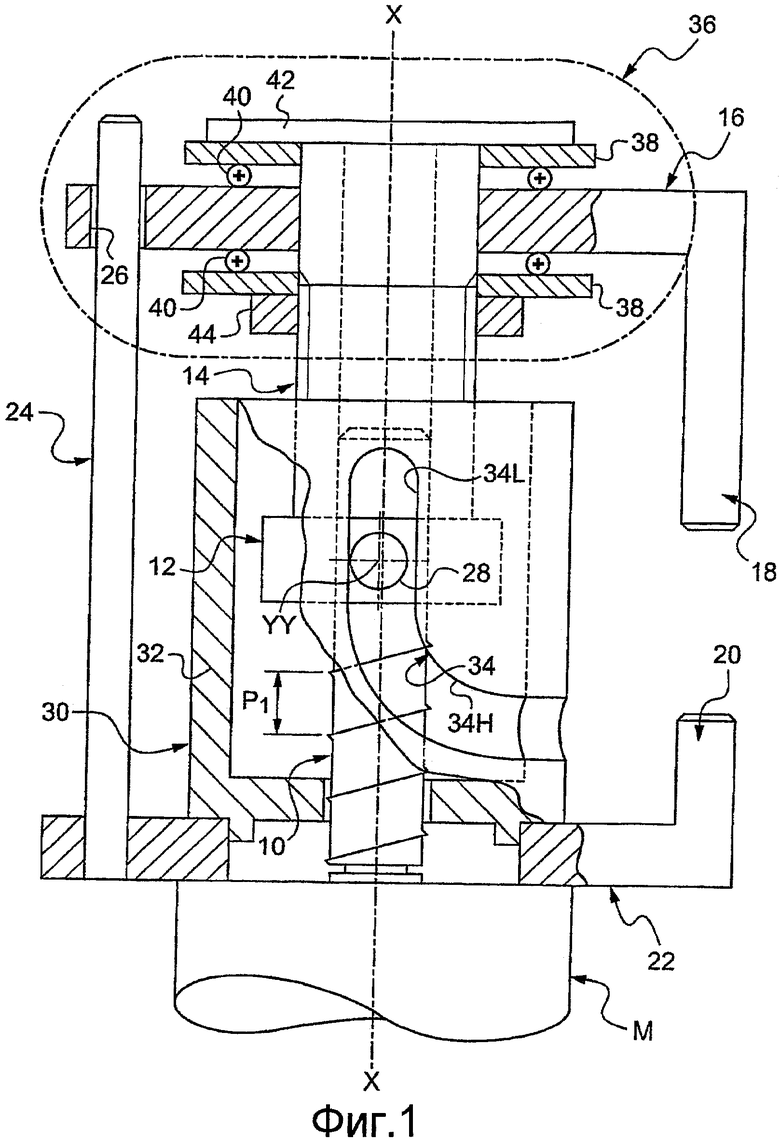
Вначале обратимся к фиг.1 и 2, которые изображают зажимное устройство из известного уровня техники и, точнее, в соответствии с заявкой РСТ/FR 05/00306. Зажимное устройство снабжено зажимным механизмом, содержащим винт 10, который приводится во вращение по оси ХХ от электродвигателя М, который может быть снабжен цифровым управлением.
Этот винт 10 имеет большой шаг Р1 и может приводиться во вращение в противоположных направлениях от двигателя М. Винт 10 взаимодействует с гайкой 12, которая приводится в поступательное перемещение в направлении оси винта ХХ. Эта гайка жестко соединена с опорой 14, называемой также «подвижной опорой», выполненной в данном случае в виде трубчатого элемента, который окружает, по меньшей мере, часть винта 10.
Опора 14 связан с пластиной 16, которая несет первый орган 18 (называемый также «подвижным органом»), который поступательно перемещается в направлении, параллельном оси ХХ, для сближения или удаления второго органа 20 (называемого также «неподвижным органом»), который размещен на неподвижной опоре 22, несущей также двигатель М.
Колонна 24 закреплена неподвижно на опоре 22 и размещена в направлении, параллельном оси ХХ, для обеспечения направления поступательного перемещения подвижной опоры 14, несущей подвижный орган 18. Пластина 16 снабжена для этого аксиальным отверстием 26, через которое проходит колонна 24. В некотором случае, когда зажимное устройство представляет собой сварочные клещи, подвижный орган 18 и неподвижный орган 20 образуют соответственно электрод и противоэлектрод.
В примере воплощения шаг Р1 винта 10 является правым шагом, величина которого предпочтительно представляет собой величину его собственного диаметра. Гайка 12 снабжена парой шкивов 28, которые образуют следящие элементы и установленные с возможностью вращения на оси YY, перпендикулярной оси ХХ винта. На фиг.1 виден один из двух шкивов.
Неподвижная опора 22 несет полую цилиндрическую опору 30, называемую также «полой втулкой», которая имеет цилиндрическую стенку 32, в которой выполнены две расположенные напротив друг друга направляющие 34 (на фиг.1 показана одна из двух направляющих). Упомянутые шкивы 28 выполнены с возможностью перемещения в двух направляющих 34, которые образуют направляющие.
Каждая из направляющих 34 содержит линейную часть 34L, которая размещена параллельно оси винта для обеспечения линейного направления гайки 12 так же, как винтовая часть 34Н, которая сообщается с линейной частью 34L для обеспечения винтового перемещения. Эта винтовая часть размещается вдоль оси ХХ винта и имеет шаг Р2, противоположный шагу Р1 винта и который имеет в данном примере левый шаг. Так как шкивы 28 находятся в контакте с частью 34L направляющих, последние мешают гайке поворачиваться и она может перемещаться поступательно с линейной скоростью, которая задается угловой скоростью двигателя и шагом Р1 винта. Все это образует первую фазу перемещения D1, называемую также ходом, которую можно квалифицировать как инерциальную фазу.
При приближении точки сжатия, то есть когда шкивы 28 сблизятся соответственно с винтовыми частями 34Н, последние приводят гайку во вращение в том же направлении, что и вращение винта. Отсюда следует, что линейная скорость гайки уменьшается, при необходимости, до нуля. В действительности это происходит из-за мнимого изменения шага (в действительности, линейная скорость гайки синхронизирована с шагом Р2). Следует отметить, что шаг Р2 может быть постоянным или изменяемым. Если предположить, как следствие, что винт 10 приводится во вращение вокруг своей оси с постоянной угловой скоростью, гайка перемещается сначала (в направлении сжатия) с постоянной скоростью для фазы D1 (инертная фаза) и затем с меньшей скоростью во второй фазе D2.
В известном зажимном устройстве опора 14 связана с пластиной 16 подвижного органа 18 упорным шарикоподшипником, обозначенным позицией 36, благодаря которому подвижная основа 14 остается постоянно жестко связанной при перемещении с подвижным органом 18. Этот упорный шарикоподшипник 36 содержит два контрфланца 38, размещенных соответственно с обеих сторон пластины 16 и опирающихся на нее подшипниками 40. Два контрфланца 38 аксиально удерживаются между пятой 42, размещенной на конце подвижной опоры 14, и гайкой 44, навинченной на другом конце подвижной опоры 14.
Недостаток зажимного устройства из известного уровня техники по фиг.1 в том, что оно не может непрерывно компенсировать происходящий со временем сдвиг между органами 18 и 20, особенно когда эти органы являются постепенно сгорающими электродами.
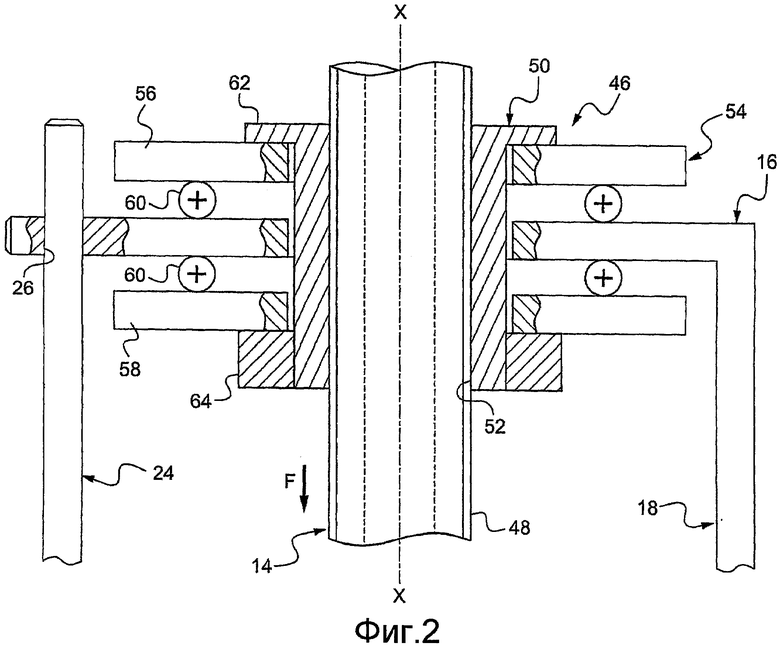
Фиг.2 позволяет исправить этот недостаток путем замены упорного подшипника 36 по фиг.1 механизмом или системой компенсации, которая размещается между первым органом 18 и подвижной опорой 14 (которая жестко связана с гайкой 12) для установки в исходное рабочее положение первого органа 18 относительно второго органа 20 таким образом, чтобы первая и вторая фазы перемещения D1 и D2, вызванные первым и вторым направляющими средствами 34L и 34Н, оставались синхронными с фазами, необходимыми для оптимизации перемещения первого органа 18.
В примере по фиг.2 система компенсации 46 содержит подвижную опору 14, выполненную в виде трубчатого элемента, жестко соединенного с гайкой 12 и снабженного внешней резьбой 48, и содержит, кроме того, ступицу 50, снабженную внутренней винтовой резьбой 52, взаимодействующей с внешней резьбой 48 подвижной опоры 14. Ступица 50 несет первый орган 18 с помощью упорного шарикоподшипника 54, который выполнен в виде шарикоподшипника с двойным эффектом, содержащего пластину 16 и два контрфланца 56 и 58, опирающихся на пластину через шарики 60. Эти два контрфланца удерживаются аксиально между фланцем 62, образованным на одном конце ступицы 50, и гайкой 64, навинченной вокруг другого конца ступицы.
Система компенсации 46 обеспечивает на частотах, необходимых для работы зажимного устройства, возможность повторной установки в исходное рабочее положение подвижного органа 18 относительно неподвижного органа 20 таким образом, что различные фазы движения, вызванные направляющими средствами цилиндрической опоры 30 (полая втулка), остаются синхронными фазам движения, необходимым для оптимизации движения подвижного органа 18.
Эта система компенсации позволяет, в частности, осуществить относительное продольное перемещение органа 18 в направлении стрелки F по отношению к органу 20 для компенсации изменений зазора, вызванного их износом. Это представляет интерес, прежде всего, в случае, когда подвижный орган 18 и неподвижный орган 20 являются соответственно электродом и противоэлектродом сварочных клещей. Такое перемещение подвижного органа 18, полученное вследствие относительного кольцевого движения между ступицей 50 и подвижной опорой 14, вызвано, в заявке РСТ/FR 05/00306, приводным устройством, которое попеременно соединяет ступицу 50 с подвижной опорой 14 или подвижным органом 18. В заявке на французский патент 05/10911 от 26 октября 2005 года (не опубликованной) предусмотрен вариант присоединения дополнительного мотора, независимого от основного мотора приводного устройства.
Для сглаживания этого недостатка в настоящем изобретении предлагается автономная система восполнения, не требующая никакого другого приводного устройства, ни органа управления, кроме механизированной системы привода основного зажима.
Обратимся теперь к фиг.3 и 4 для описания системы компенсации по изобретению.
Фиг.3 повторяет фиг.2, к которой добавили первый диск 68 (или «компенсационный диск»), вращающийся совместно со ступицей 50 посредством пальца 66, при этом диск может поступательно перемещаться по упомянутой ступице. Ступица 50, как было указано, навинчена на подвижную опору 14.
Второй диск 80 (или «измерительный диск») установлен на подвижной опоре 14 с помощью механизма 76. Этот известный и не представленный на чертеже механизм типа «холостого хода велосипедного колеса», который вызывает вращение подвижной опоры 14 относительно диска 80 только в единственном направлении R (фиг.4). По меньшей мере, одна пружина 74 для накопления энергии размещена между дисками 68 и 80. В данном примере пружина 74 является пружиной сжатия и размещается в окне, выполненном в диске 68, и в другом окне, выполненном в диске 80.
Пружина, снабженная двумя полунаправляющими 70 и 72, обеспечивает продольное положение диска 68 относительно диска 80. Подвижный орган 18 доходит до уровня диска 80, вращение которого при определенных условиях он может остановить.
Фиг.4 показывает вид по стрелке IV конструкции, представленной на фиг.3, на котором, в частности, виден диск 80, опирающийся на подвижный орган 18, благодаря выступу на периферии диска 80. В фазе сжатия (шкив 28 находится в части 34Н канавки на фиг.1) комплекс из двух дисков 68 и 80 будет вращаться в направлении стрелки R. Если предполагается, что уровень износа органов 18 и 20 (фиг.1) достигает порога, необходимого для восполнения этого износа, угол вращения подвижной опоры 14 будет таким, что диск 80 войдет в контакт с органом 18. Таким образом, в этой фазе сжатия усилие, передаваемое через связь подвижной опоры 14 с втулкой 50, таково, что трение, возникающее в винтовой резьбе, которая разделяет эти две детали, их соединяет таким образом, что при остановленном диске 80 и вращающемся диске 68 поверхность 82 диска 68 будет перемещаться относительно поверхности 84 диска 80. Таким образом, пружина 74 будет сжиматься, и это сжатие будет передаваться до конца движения подвижной опоры 14.
Другими словами, запоминание состояния износа деталей фиксируется относительным угловым положением измерительного диска 80 по отношению к подвижной опоре 14, при этом измерительный диск 80 надежно блокируется на подвижном органе 18, в то время, как компенсационный диск 68, который сжимает пружину(ы) 74, приводится во вращение ступицей 50, которая вращается совместно с подвижной опорой 14 благодаря усилию, передаваемому ступицей 50 и подвижной опорой 14.
Следует отметить, что в течение этой фазы механизм 76 осуществляет вращение подвижной опоры 14 в диске 80 в направлении стрелки R. В течение фазы разжимания подвижная опора 14 будет поворачиваться в направлении, противоположном стрелке R, и в этом случае благодаря механизму 76 приводить во вращение диск 80. Пружина 74 будет поворачивать, таким образом, ступицу 50 относительно подвижной опоры 14, когда уровень напряжения между двумя этими деталями будет достаточно мал для обеспечения этого перемещения, то есть когда органы 18 и 20 (фиг.1) не будут больше находиться в контакте, и именно при этом движении будет осуществляться операция восполнения.
Если при значительной разрегулировке произойдет так, что измерительный диск 80 упрется в подвижный орган 18 перед появлением значительного реального напряжения между подвижной опорой 14 и ступицей 50, диск 80 будет приводиться во вращение от ступицы 50 через пружину 74. Это была бы фаза восполнения в реальном времени. Это прекратилось бы, как только напряжение между ступицей 50 и подвижной опорой 14 достигло бы значения, достаточного для соединения этих двух деталей и сжатия таким образом пружины 74 путем относительного перемещения измерительного диска 80 и компенсационного диска 68, приводимого во вращение ступицей 50.
Этот процесс запаздывающего восполнения осуществляется тем более легко, что чаще всего уменьшающийся шаг канавок опоры (втулки) 30 в зависимости от сжатия будет в этот момент выше значения фиксированного шага резьбы, которая связывает ступицу 50 с подвижной опорой 14 (следует отметить, что когда восполнение осуществляется реально, органы 18 и 20 больше не соприкасаются).
На практике, если в конце сжатия шаг канавок втулки имеет значение порядка одного миллиметра, в большинстве случаев целесообразно принять значение такого порядка для рассматриваемой резьбы, во всяком случае, эффективность восполнения может привести к использованию больших значений. Факт установки пружины 74 в двух окнах дисков 68 и 80 имеет то преимущество, что он заставляет работать эту пружину в предварительно напряженном состоянии, даже когда это не требуется, то есть когда поверхности 82 диска 68 и 84 диска 80 являются параллельными. Более того, такое предварительное напряжение пружины 74 гарантирует ее долговечность.
Эта особенность позволяет лучше держать под контролем явления гистерезиса пружины и трения, существующего между ступицей 50 и опорой 14, которое нарушает надежность системы. Она позволяет также учитывать характеристики упомянутой пружины относительно порога напряжения, позволяющего или нет осуществить вращение ступицы 50 на опоре 14. Наконец, если она обеспечивает эффективное направление пружины полунаправляющими 70 и 72, то она исключает любую операцию регулирования, то есть несвоевременную разрегулировку пружины 74. На практике предусматривают установку множества пружин 74 на одном и том же оборудовании, в качестве варианта можно разместить пружинную спиральную систему между дисками 68 и 80.
Это простое и полностью автономное функционирование не мешает работе единственного двигателя М на фиг.1, напротив, оно позволяет отслеживать небольшие изменения амплитуды частот. Впрочем, указанное отслеживание может осуществляться только тогда, когда усилие между органами 18 и 20 достигнет своего максимального значения. При использовании в тормозных системах автомобилей представляется желательным осуществление этой операции при каждой остановке автомобиля, за пределами максимальных условий торможения. Из этого описания достаточно понятно, что различные стадии изобретения, а именно запоминание состояния изношенных деталей, которое фиксируется угловым положением диска 80 относительно опоры 14, определяется механизмом 76 (это запоминание, само собой разумеется, комбинируется с продольным положением ступицы 50). Величина износа соответствует энергии в пружине 74, и последняя высвобождает энергию, когда уровень напряжения между ступицей 50 и опорой 14 достаточно мал для регулировки относительного положения этих двух деталей при наилучших условиях измерения износа этих компонентов и при минимальном потреблении энергии.
Во всяком случае, в изобретении также предусмотрено, по причинам безопасности, что если выбираемый зазор является слишком большим (то есть, если операция восполнения не проводилась достаточно длительное время), то можно, с одной стороны, с помощью программных средств автоматически и после неполного торможения обеспечить «растормаживание» с последующим немедленным торможением (аналог «помпажа», который сегодня осуществляют водители автомобилей, для исключения скольжения на дороге) для того, чтобы восполнить износ и, таким образом, запомнить его вращением диска 80 при первом неполном торможении и восстановить условия надлежащего функционирования, причем эта последовательность может повторяться, и, с другой стороны, с помощью системы (не представленной на чертеже) блокировать вращение диска 68 относительно диска 80, например, когда пружина 74 достигает своей максимальной степени сжатия. Такая блокировка диска 68 может осуществляться воздействием упора на орган 18, причем упор смещен в пространстве по отношению к упору диска 80. В этом случае вращение опоры 14 приводит непосредственно к фазе восполнения, так как диск 68 и, следовательно, ступица 50 вращаются вместе. Эта операция должна являться исключительной, так как при напряжениях она приводит к значительному износу резьбы между ступицей 50 и опорой 14 и перенапряжению мотора. Наконец, накопленная в пружине 74 в периоде, предшествующем этой фазе, энергия, во второй фазе точно отрегулирует положение ступицы 50 и опоры 14, когда их связь ослабнет. Она будет уменьшать комплекс напряжений, вызываемых этой операцией восполнения в реальном времени в кинематике.
Если принять, что эта операция восполнения в реальном времени не является исключительной и может быть систематизирована, механизм, изображенный на фиг.3, может значительно упроститься, потому что ступица 50 может сама непосредственно воздействовать до упора на орган 18. Таким образом, можно исключить диск 80, механизм 76, пружину 74 и диск 68. Эта возможность, следует это повторить, не представляется реальной, так как она вызывает (вследствие напряжений между всеми находящимися во взаимном перемещении деталями в процессе этой фазы восполнения) уменьшение надежности системы во времени вследствие повышенной степени износа указанных деталей. Она значительно повышает уровень энергии, необходимой для реализации этой операции, она ухудшает точность позиционирования, не позволяет высвободить напряжения, сохраняющиеся в кинематическом комплексе, и наконец, она значительно повышает нагрузку на мотор в плане отбираемой мощности. Следует отметить, что, в случае, когда зажимное устройство по изобретению используется в дисковой тормозной системе, имеет место повторная установка в исходное рабочее положение механизма 76 и ступицы 50 при каждой смене тормозных колодок. Следует также осуществлять эту операцию при любой замене изношенных деталей, где бы они не применялись.
Как вариант, механизм холостого хода 76 может быть заменен сцеплением, которое либо жестко соединено, либо остается свободным при вращении с диском 80 и с подвижной опорой 14. Впрочем, блокировка вращения самого диска 80, а также детали 18, может быть осуществлена или нет в соответствии с точной программой и не быть более систематизированной использованием упора. Таким образом, один орган управления может программировать фазу повторной установки в исходное рабочее положение, которое включало бы, например, «увеличение» размера тормозных колодок, вызванного чрезмерным механическим нагревом.
Обратимся теперь к фиг.5, на которой виден винт 10, образующий с гайкой 12 реверсивную систему, которая может приводиться во вращение на оси ХХ не представленным на чертеже мотором. Гайка 12 несет, по меньшей мере, один шкив 28, установленный с возможностью свободного вращения на оси YY и который опирается на стенку 32, являющуюся частью полой опоры 30, называемой также полой втулкой. Эта стенка 32 выполнена цилиндрической по оси ХХ таким образом, что является концентрической по отношению к винту 10. Шкив 28 перемещается в выполненной в стенке 32 винтовой канавке 34 с переменным шагом в направлении, обратном относительно направления винта 10, выполненного в упомянутой стенке 32. Канавка 34 образует направляющую, как было сказано выше при описании фиг.1. Вращение винта 10 вызывает продольное перемещение гайки 12, в направлении вращения мотора и шага винта 10 в соответствии с силой F. Система винт-гайка 10-12 является реверсивной, при этом гайка при перемещении шкивом 28 отслеживает шаг винтовой канавки 34, выполненной в полой втулке 30.
Таким образом, важную часть силы F образует давление шкива 28 на втулку 30. Эта часть будет тем более значительной, чем меньше будет шаг канавки 34 во втулке 30 по сравнению с шагом винта 10. Понятно, что когда шаг во втулке 30 становится нулевым, наступает фаза, присущая нереверсивности, которая избавляет винт 10 от любой аксиальной нагрузки.
Таким образом, целью изобретения является обеспечение возможности передачи усилия между шкивом 28 и втулкой 30 наиболее эффективным образом. Речь идет о соответствии профиля шкива и канавки, что обеспечивает наилучшую отдачу при подавлении любого вредного скольжения и обеспечения равенства скоростей контактирующих деталей во всех точках контакта. Необходимо также, чтобы диаметр шкива 28 пропорционально увеличивался по радиусу от соответствующей точки контакта со втулкой 30 к оси ХХ.
Такая конфигурация получается тогда, когда поверхность контакта между шкивом 28 и втулкой 30 размещена по оси ZZ, которая связывает точку пересечения О осей ХХ и YY и точку Р, которая соответствует точке контакта втулки 30 и шкива 28 на уровне среднего диаметра d последнего.
Такая конфигурация обеспечивает плотный контакт без вредного скольжения двух деталей независимо от значений D (диаметр втулки 30), d (средний диаметр шкива 28) и Е (толщина стенки 32 втулки 30).
Очевидно, что число шкивов и их расположение (два при 180°, три при 120° и так далее) будут таковыми, что не оказывают никакого особого воздействия на винт вследствие аксиального усилия, воздействующего на каждый шкив благодаря его форме усеченного конуса.
Установка шкивов 28 на соответствующих осях включает упор для восприятия указанного аксиального усилия. Этот упор не показан на фиг.5.
Наконец, механический зазор между гайкой 12 и винтом 10 будет таким, что центрирование, вызываемое шкивами 28 и втулкой 30, не оказывает на винт никакого воздействия. Действительно, значение этого зазора будет определено выше значения погрешности при выполнении центрирования втулки 30 и шкивов 28, чтобы не создавать гиперстатическую систему.
Впрочем, такая конструкция способна передавать значительные нагрузки и особенно интересна в случае применения в прессах (ручных или с приводом). Другими словами, усовершенствуя условия передачи между шкивами и полой опорой (втулкой), она способна уменьшить до минимума габаритные размеры кинематической конструкции для заданной нагрузки.
Наконец, следует отметить, что центрирование втулки 30 и шкивов 28 в форме усеченного конуса на гайке 12 может образовать линейную направляющую для подвижной системы в некоторых конструкциях.
Обратимся теперь к фиг.6, которая изображает зажимное устройство, выполненное в виде электропривода, который находит предпочтительное применение в системах управления дисковым торможением для автомобилей.
Здесь представлен винт 10, который взаимодействует с гайкой 12, жестко соединенной с опорой 14, окружающей, по меньшей мере, частично винт 10. Гайка снабжена двумя шкивами 28 со стенкой в форме усеченного конуса, размещенными через 180°, которые взаимодействуют с соответствующими канавками 34 винтовой формы с изменяемым шагом, выполненными в полой опоре (полой втулке) 30. Каждый из шкивов 28 взаимодействует с упором 88, в данном случае упорным шарикоподшипником, для восприятия осевого усилия, передаваемого шкивом в форме усеченного конуса.
Здесь представлена также система компенсации, или восполнения износа, описанная ранее. Она содержит также ступицу 50, снабженную внутренней резьбой для соединения с внешней резьбой подвижной опоры 14. Втулка 50 поддерживает первый орган 18 (подвижный орган) при помощи упорного шарикоподшипника 54, который выполнен в виде подшипника с двойным эффектом, содержащего пластину 16 и два контрфланца 56 и 58, ранее упомянутых. Подвижный орган 18 может представлять собой приводной поршень, способный двигаться в направлении, противоположном тормозным дискам (не представлено на чертежах).
На фиг.6 также представлен диск 68, жестко соединенный при вращении со ступицей 50, и второй диск 80 (измерительный диск), установленный на подвижной опоре 14 с помощью механизма 76 холостого хода. По меньшей мере, одна пружина 74 описанного выше типа (фиг.3 и 4) размещается каждый раз в окне диска 68 и в окне диска 80. В данном примере продольное положение диска 68 относительно диска 80 (диск 68 не должен следовать за ступицу 50 в ее продольном перемещении) поддерживается поступательным перемещением (не представленным на чертеже) диска 68 на механизме холостого хода 76, а не направляющими пружин(ы) 74.
В рассматриваемом примере винт 10 способен вращаться в том или ином направлении с помощью электрического двигателя (не представленного на чертеже), а гайка 12 снабжена датчиком 90 в форме диска для определения ее углового положения. Устройство или привод имеют компактную конструкцию, так как они заключены в основном в цилиндрический корпус, образованный втулкой 30. Один конец втулки 30 выполнен в виде фланца для крепления электродвигателя, а другой конец связан с подвижным органом 28, например, в данном случае, с приводным поршнем дискового тормоза. Винт 12 предпочтительно выполнен непосредственно на выходной оси электродвигателя. Он может иметь, например, для крупных тормозов, усилие которых составляет 100 кН, диаметр 20 мм и шаг 16 мм. Датчик 90 позволяет измерять угловое положение опоры 14 и, таким образом, оценивать износ тормозных колодок с очень большой точностью.
Так изготавливают электрический тормоз малых размеров с особо совершенной системой компенсации или восполнения износа.
Изобретение относится к зажимному устройству для установки в исходное положение контактирующих деталей и может быть применено, в частности, в сварочных клещах и системах дискового торможения. Зажимное устройство содержит первый орган (18) и второй орган, выполненный с возможностью относительного перемещения под действием приводного устройства типа винт-гайка. Система компенсации (46) размещена между подвижной опорой (14) и первым органом (18), жестко связанным с гайкой (12) для повторной установки в исходное рабочее положение этого первого органа (18) относительно второго органа. Система компенсации содержит компенсационный диск (68), жестко соединенный при вращении со ступицей (50), навинченной на подвижную опору (14), измерительный диск (80), установленный на подвижной опоре (14) посредством механизма холостого хода (76), и, по меньшей мере, одну пружину (74) для накапливания энергии, размещенную между компенсационным диском (68) и измерительным диском (80) таким образом, что запоминание состояния износа деталей обеспечивается относительным угловым положением измерительного диска (80) по отношению к подвижной опоре (14). В результате обеспечивается компенсация износа контактирующих деталей при их работе. 9 з.п. ф-лы, 6 ил.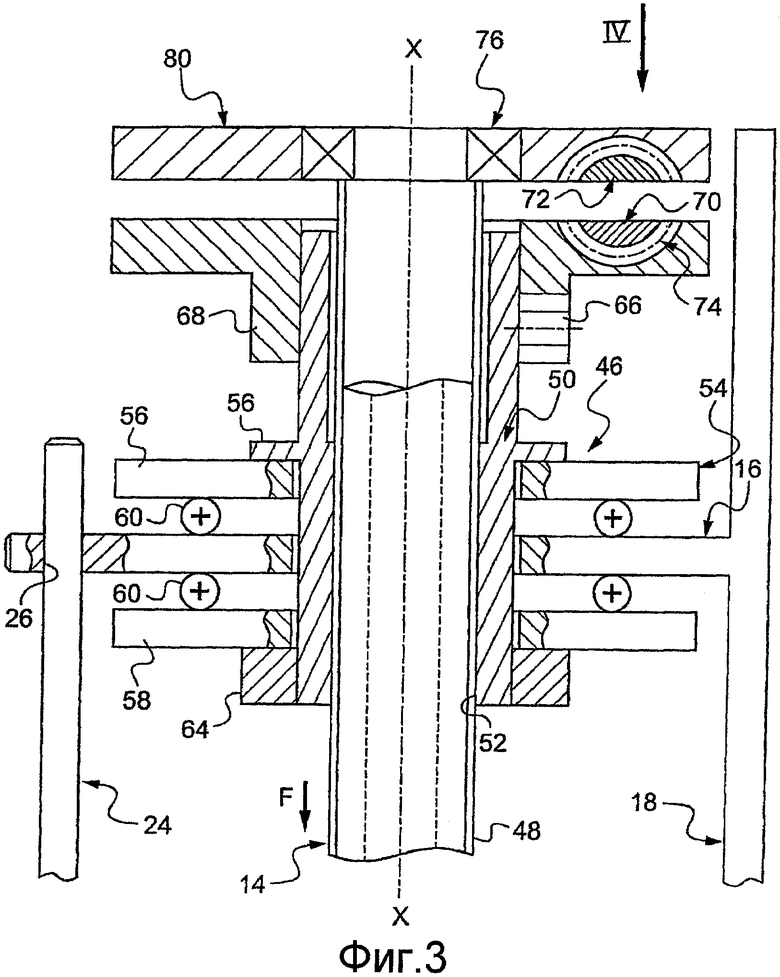
1. Зажимное устройство, содержащее первый орган (18) и второй орган (20), выполненные с возможностью относительного перемещения под действием приводного устройства, которое включает винт (10) с заданным шагом (Р1), предназначенный для привода во вращение вокруг оси (XX) в противоположных направлениях от двигателя (М), гайку (12), взаимодействующую с винтом (10) для поступательного перемещения вдоль оси (XX) винта, при этом упомянутая гайка жестко связана при перемещении с первым органом (18), первые направляющие средства (34L), определяющие линейное перемещение, параллельное оси (XX) винта (10), для блокировки вращения гайки (12) в первой фазе перемещения (D1) гайки, и вторые направляющие средства (34Н), определяющие винтовое направление, которое простирается вдоль оси (XX) винта (10) и имеет шаг (R2), инверсный относительно шага (Р1) винта для обеспечения вращения гайки (12) в том же направлении вращения, что и винт (10) во второй фазе перемещения (D2) гайки (12), и систему компенсации (46), размещенную между первым органом (18) и подвижной опорой (14), жестко соединенным с гайкой (12) для повторной установки в исходное рабочее положение первого органа (18) относительно второго органа (20) таким образом, что первая и вторая фазы перемещения, порождаемые первыми и вторыми направляющими средствами (34L и 34Н), остаются синхронными с фазами, необходимыми для оптимизации перемещения первого органа, отличающееся тем, что система компенсации (46) содержит компенсационный диск (68), жестко соединенный при вращении со ступицей (50), навинченной на подвижную опору (14), измерительный диск (80), установленный на подвижной опоре (14) с помощью механизма холостого хода (76), и, по меньшей мере, одну пружину (74) для накапливания энергии, размещенную между компенсационным диском (68) и измерительным диском (80) таким образом, что запоминание состояния износа деталей определяется относительным угловым положением измерительного диска (80) и подвижной опоры (14), а также тем, что в процессе второй фазы перемещения (D2) гайки (12) необходимость осуществления восполнения износа подтверждается доведением до упора измерительного диска на подвижный орган (18), при этом компенсационный диск (68) приводится во вращение ступицей (50), сжимающей пружину(ы) (74) до конца движения подвижной опоры (14).
2. Зажимное устройство по п.1, отличающееся тем, что механизм холостого хода (76) выполнен с возможностью осуществлять вращение подвижной опоры (14) в измерительном диске (80) только в одном направлении (R).
3. Зажимное устройство по одному из пп.1 или 2, отличающееся тем, что пружина(ы) (74) рассчитана(ы) для накопления необходимой энергии при операции восполнения и высвобождения этой энергии, когда уровень напряжения между ступицей (50) и подвижной опорой (14) вызывает возникновение момента сопротивления, меньшего, чем момент, возникающий при сжатой пружине(ах), при этом высвобождение энергии может осуществляться только при вращении компенсационного диска (68) в связи с тем, что механизм холостого хода (76) препятствует вращению измерительного диска (80).
4. Зажимное устройство по п.1, отличающееся тем, что в исключительном случае, если восполняемое пространство слишком велико или когда пружина(ы) (74) достигает(ют) максимального уровня сжатия, вращение компенсационного диска (68) и измерительного диска (80) блокируется, вызывая таким образом относительное движение между подвижной опорой (14) и ступицей (50) для осуществления фазы восполнения в реальном времени.
5. Зажимное устройство по п.4, отличающееся тем, что после фазы восполнения в реальном времени и когда уровень напряжения между подвижной опорой (14) и ступицей (50) снизится, энергия, накопленная в пружине(ах) (74) перед фазой восполнения в реальном времени, способна сократить указанную фазу восполнения и уменьшить совокупность напряжения, обусловленных кинематикой этой операции.
6. Зажимное устройство по п.1, отличающееся тем, что гайка (12) взаимодействует с винтом (10) благодаря, по меньшей мере, одному шкиву (28), установленному на оси (YY), перпендикулярной оси (XX) винта (10), с втулкой (30), образованной цилиндрической стенкой (32), концентричной винту (10), и в которой выполнена, по меньшей мере, одна винтовая канавка (34) с изменяемым шагом, но в направлении, инверсном относительно шагу винта, содержащее канавку, в которой перемещается шкив (28), отличающееся тем, что шкив (28) выполнен в форме усеченного конуса, при этом контактная поверхность, соответствующая канавке (34), наклонена относительно оси (YY) шкива (28) на такую величину, что увеличение скорости, вызванное удалением от оси (XX) точки контакта между шкивом (28) и цилиндрической стенкой (32), будет полностью компенсироваться увеличением диаметра шкива (28) в зависимости от этого удаления, обеспечивая таким образом однородный постоянный контакт между шкивом (28) и поверхностью канавки (34) без какого-либо вредного скольжения независимо от относительных значений толщины (Е) цилиндрической стенки (32) втулки, диаметра (D) втулки и диаметра (d) шкива (28).
7. Зажимное устройство по п.6, отличающееся тем, что оно содержит множество копланарных шкивов (28) для того, чтобы аннулировать усилия, которые оказывает на их ось их профиль в форме усеченного конуса, и исключить какое-либо воздействие на винт.
8. Зажимное устройство по п.7, отличающееся тем, что оно содержит два шкива через 180° или три шкива через 120°.
9. Зажимное устройство по одному из пп.6-8, отличающееся тем, что в каждом шкиве (28) предусмотрен упор (88) для восприятия осевого усилия, вызываемого профилем шкива в форме усеченного конуса.
10. Зажимное устройство по п.6, отличающееся тем, что между винтом (10) и гайкой (12) предусмотрен механический зазор, превышающий величину допустимого отклонения центрирования гайки (12) шкивами (28) для того, чтобы оградить винт (10) от всех возможных гиперстатических явлений.
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2024 |
|
RU2822401C1 |
| Струбцина | 1989 |
|
SU1808682A1 |
| RU 2060133 C1, 20.05.1996 | |||
| УСТРОЙСТВО ДЛЯ СБОРКИ И СВАРКИ | 1995 |
|
RU2078667C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ СОСТОЯНИЯ ПАЦИЕНТА ПОСЛЕ ФИЗИЧЕСКИХ НАГРУЗОК И ДЛИТЕЛЬНЫХ СТАТИЧЕСКИХ ПОЗ | 2003 |
|
RU2261081C2 |
| Чугун | 1982 |
|
SU1057569A1 |
| DE 4417789 A, 29.06.1995 | |||
| JP 5042395 A, 23.09.1993 | |||
| US 4344215 A, 17.08.1982. | |||

