Настоящее изобретение относится к устройству для разъединения буровой колонны, к буровой системе, содержащей такое устройство для разъединения, и к применению такой системы.
Применение такого устройства для разъединения имеет место при бурении скважин, таких как скважины для добычи нефти. При таком применении устройство для разъединения помещают, например, на дно скважины, между устройством для соединения и трубами буровой колонны. При бурении скважины оператор, например, задействует тормозное устройство в устье выработки скважины для управления спуском буровой колонны. Режущий инструмент, который опирается на дне скважины на геологическую формацию, таким образом, принимает на себя только небольшую часть массы труб буровой колонны.
Однако, когда режущий инструмент врезается в породу, прочность которой сильно превышает общую прочность геологической формации, тогда он испытывает значительную нагрузку при сопротивлении в продольном направлении в сторону устья выработки скважины. Повторные нагрузки при таком экстремальном сопротивлении приводит к износу режущего инструмента. Однако режущий инструмент имеет значительную длину и высокую стоимость.
Цель настоящего изобретения состоит в том, чтобы исключить испытываемые режущим инструментом повышенные нагрузки при сопротивлении в продольном направлении буровой скважины.
Устройство для разъединения буровой колонны согласно одному варианту осуществления настоящего изобретения содержит в продольном направлении:
первую конструкцию, предназначенную для прикрепления к трубе буровой колонны,
вторую конструкцию, предназначенную для поддержания бурового режущего инструмента, при этом указанная вторая конструкция является подвижной, перемещаясь в продольном направлении относительно первой конструкции,
где указанное устройство для разъединения отличается тем, что кроме прочего содержит узел толкателя между указанной первой конструкцией и указанной второй конструкцией, указанный узел толкателя предусмотрен для осуществления толкающего усилия на указанную вторую конструкцию для отведения второй указанной конструкции от первой указанной конструкции, при этом указанное толкающее усилие является практически постоянным для любого положения второй конструкции относительно первой конструкции.
Благодаря таким конструкциям, устройство для разъединения складывается, когда испытывает нагрузку при сопротивлении, превышающую нагрузку толкателя. Тогда режущий инструмент смещается в направлении устройства для разъединения, немного уходя вглубь скважины, контакт между режущим инструментом и геологической формацией ослабевает, и нагрузка при сопротивлении на режущий инструмент уменьшается. Таким образом, нагрузка при сопротивлении геологической формации на режущий инструмент автоматически регулируется устройством для разъединения. Режущий инструмент больше не подвергается повторяющейся экстремальной нагрузке при сопротивлении и изнашивается не так быстро.
Кроме того, устройство для разъединения предназначено для фильтрации вибраций, исходящих от буровой колонны в направлении режущего инструмента, и, наоборот, исходящие от режущего инструмента в направлении буровой колонны. Буровая колонна и вся буровая система в этом случае подвергается меньшему количеству вредных колебаний, что также облегчает управление бурением скважины.
Кроме того, толкающее усилие устройства для разъединения является постоянным на большой протяженности перемещения второй конструкции относительно первой конструкции, при этом между первым положением и вторым положением устройство для разъединения обладает очень слабой собственной жесткостью. Таким образом, масса режущего инструмента, подвешенного посредством устройства для разъединения сама по себе не вызывает подобие резонанса, усиливающего вибрации буровой системы.
В различных вариантах осуществления устройства для разъединения буровой колонны согласно настоящему изобретению можно при необходимости прибегнуть к одному и/или другому из следующих условий:
- вторая конструкция направляется относительно первой конструкции в продольном направлении, и устройство толкателя содержит по меньшей мере один уравновешивающий механизм, включающий упругий элемент и выходной рычаг, при этом упругий элемент производит упругое усилие, пропорциональное сжатию упругого элемента, выходной рычаг соединен с указанным упругим элементом и способен вращаться вокруг выходной оси, и устройство для соединения между указанным выходным рычагом и указанной второй конструкцией, для приложения указанного толкающего усилия к указанной второй конструкции в указанном продольном направлении, причем устройство для соединения содержит шарнирно присоединенный ролик с возможностью вращения относительно выходного рычага, на расстоянии от указанной выходной оси, опирающийся на поверхность соединения, связанную со второй конструкцией и практически перпендикулярную продольному направлению;
- уравновешивающий механизм кроме прочего включает:
- подвижный элемент, перемещающийся при сжатии упругого элемента,
- входной рычаг, шарнирно присоединенный с возможностью вращения относительно входной оси и содержащий часть конца, контактирующего с поверхностью подвижного элемента, при этом указанный входной рычаг наклонен под первым углом относительно перпендикулярного направления в продольном направлении,
- входную шестерню, жестко соединенную с указанным входным рычагом, и
- выходную шестерню, жестко соединенную с выходным рычагом и находящуюся в зацеплении с указанной входной шестерней, и
- выходной рычаг, наклоненный под вторым углом относительно продольного направления, при этом указанный второй угол равен двум указанным первым углам;
- подвижный элемент, перемещаемый в продольном направлении и способный отклоняться на угол отклонения относительно указанного продольного направления;
- при этом входная и выходная шестерни имеют форму сектора для уменьшения габаритных размеров уравновешивающего механизма;
- устройство толкателя содержит первый и второй уравновешивающие механизмы, при этом каждый уравновешивающий механизм имеет выходную ось, где выходные оси располагаются со смещением относительно друг друга в продольном направлении для уменьшения радиального расстояния, перпендикулярного продольному направлению, между указанными выходными осями и уменьшения радиального размера, перпендикулярного продольному направлению, устройства толкателя;
- входные шестерни первого и второго уравновешивающих механизмов находятся в зацеплении друг с другом;
- устройство толкателя содержит ряд модулей, установленных друг за другом в продольном направлении между первой конструкцией и второй конструкцией, при этом каждый модуль обеспечивает часть толкающего усилия на указанную вторую конструкцию, таким образом, что сумма указанных частей толкающего усилия равна толкающему усилию устройства толкателя;
- модули из ряда модулей являются идентичными, при этом каждый модуль обеспечивает идентичную часть толкающего усилия;
- устройство толкателя содержит по меньшей мере одну тягу, проходящую через все модули в продольном направлении и предусмотренную для объединения модулей в первую конструкцию, и каждый модуль содержит по меньшей мере один толкатель, предусмотренный принимать указанную часть толкающего усилия, при этом толкатель одного модуля предусмотрен, чтобы толкать толкатель следующего модуля или чтобы толкать вторую конструкцию с толкающим усилием;
- каждый модуль содержит растягивающее устройство, предназначенное для соединения модуля с внешней трубой, жестко соединенной с первой конструкцией;
- между каждым толкателем и следующим за ним толкателем помещен упругий элемент;
- каждый модуль содержит часть внутренней трубы и часть внешней трубы, окружающую часть внутренней трубы, где:
- части внешней трубы жестко соединены друг с другом и с первой конструкцией,
- части внутренней трубы жестко соединены друг с другом и со второй конструкцией, и
- каждый модуль обеспечивает указанную часть усилия на часть внутренней трубы указанного модуля;
- устройство толкателя расположено в кольцеобразном пространстве, расположенном радиально между внутренней трубой, предназначенной для отведения по меньшей мере жидкости внутри указанной внутренней трубы, и внешней трубой, жестко соединенной с первой конструкцией и охватывающей указанное устройство толкателя;
- элементы устройства толкателя жестко соединены друг с другом посредством армирования с последующим шплинтованием для выдерживания механических нагрузок, возникающих на указанных соединенных элементах.
Настоящее изобретение также относится к буровой системе, содержащей устройство для разъединения, как описанное выше, и также содержащей:
- буровую колонну, содержащую по меньшей мере одну трубу, где указанная буровая колонна соединена с первой конструкцией устройства для разъединения,
- режущий инструмент, предназначенный для бурения геологической формации, где режущий инструмент соединен со второй конструкцией устройства для разъединения, и
- устройство удержания буровой колонны в устье выработки скважины, предусмотренное для управления спуском буровой колонны и повторной установкой буровой колонны в буровой скважине.
В различных вариантах осуществления буровой системы согласно настоящему изобретению при необходимости можно прибегнуть к одному и/или другому из следующих условий:
- устройство для разъединения, содержащее по меньшей мере один датчик перемещения для определения положения второй конструкции относительно первой конструкции, при этом система содержит устройство передачи для передачи данных об указанном положении к устройству удержания для управления усилием удержания буровой колонны;
- усилие удержания буровой колонны повышается, если положение указывает на то, что вторая конструкция расположена вблизи от первой конструкции, и усилие удержания буровой колонны понижается, если положение указывает на то, что вторая конструкция отдалена от первой конструкции,
Настоящее изобретение также относится к использованию буровой системы, как описана выше, при котором
- определяют усилие удержания буровой колонны, при этом указанное усилие удержания сохраняется постоянным,
- бурят предопределенное расстояние в толще геологической формации, при этом данное расстояние является меньшим, чем ход устройства для разъединения,
- измеряют угол, соответствующий углу вращения режущего инструмента при бурении указанного определенного расстояния, и
- определяют глубину вруба указанной геологической формации, относительно расстояния, предопределенного посредством измеренного угла.
Иными словами, настоящее изобретение относится к применению буровой системы, как описана выше, при котором:
- определяют усилие удержания буровой колонны, при этом указанное усилие удержания сохраняется постоянным,
- бурят геологическую формацию до предопределенного угла вращения режущего инструмента,
- измеряют соответствующее расстояние продвижения режущего инструмента при бурении до предопределенного угла вращения, при этом указанное расстояние является расстоянием между первой и второй конструкцией устройства для разъединения, и
- определяют глубину вруба указанной геологической формации, относительно расстояния, предопределенного посредством измеренного угла.
Благодаря таким конструкциям возможно определить глубину вруба, при этом получая информацию об измерениях непосредственно со дна скважины. Определение глубины вруба в данном случае является очень точным.
В различных вариантах осуществления применения буровой системы согласно настоящему изобретению, при необходимости можно прибегнуть к одному и/или другому из следующих условий:
- усилие удержание равно нулю; и
- глубина вруба позволяет определить сопротивление породы на дне скважины, исходя из модели кинематической пары режущего инструмента.
Настоящее изобретение также относится к устройству для разъединения.
В документе FR-2 814 449 описывается устройство для смещения нагрузки свайного или шпунтового типа.
Однако такое устройство способно лишь компенсировать вес нагрузки, то есть усилия в вертикальном направлении.
Цель настоящего изобретения - обеспечить возможность компенсации усилий в любом направлении.
Устройство для разъединения согласно одному варианту осуществления настоящего изобретения содержит в продольном направлении:
- первую конструкцию, предназначенную для прикрепления к трубе буровой колонны,
- вторую конструкцию, предназначенную для поддержания бурового режущего инструмента, при этом вторая конструкция является подвижной, перемещаясь в продольном направлении относительно первой конструкции,
- узел толкателя между указанной первой конструкцией и указанной второй конструкцией, указанный узел толкателя предусмотрен для осуществления толкающего усилия на указанную вторую конструкцию для отведения второй указанной конструкции от первой указанной конструкции, при этом указанное толкающее усилие является практически постоянным для любого положения второй конструкции относительно первой конструкции,
- устройство толкателя содержит по меньшей мере один уравновешивающий механизм, содержащий упругий элемент и выходной рычаг, при этом упругий элемент производит упругое усилие, пропорциональное сжатию упругого элемента, выходной рычаг соединен с указанным упругим элементом и способен вращаться вокруг выходной оси, где устройство для разъединения отличается тем, что устройство толкателя содержит по меньшей мере одно устройство для соединения между указанным выходным рычагом и указанной второй конструкцией, для приложения толкающего усилия к указанной второй конструкции в указанном продольном направлении, причем указанное устройство для соединения содержит шарнирно присоединенный ролик с возможностью вращения относительно выходного рычага, на расстоянии от указанной выходной оси, опирающийся на поверхность соединения, связанную со второй конструкцией и практически перпендикулярную продольному направлению.
Благодаря таким конструкциям, устройство для разъединения применимо для разъединения второй конструкции первой конструкции при любом направлении указанных конструкций относительно вертикали или при любом направлении усилия разъединения относительно вертикали.
В различных вариантах осуществления устройства для разъединения согласно настоящему изобретению можно при необходимости прибегнуть к одному и/или другому из следующих условий:
уравновешивающий механизм, кроме прочего, включает:
- подвижный элемент, перемещающийся при сжатии упругого элемента,
- входной рычаг, шарнирно присоединенный с возможностью вращения относительно входной оси и содержащий часть конца, контактирующего с поверхностью подвижного элемента, при этом указанный входной рычаг наклонен под первым углом относительно перпендикулярного направления в продольном направлении,
- входную шестерню, жестко соединенную с указанным входным рычагом, и
- выходную шестерню, жестко соединенную с выходным рычагом и находящуюся в зацеплении с указанной входной шестерней, и
- выходной рычаг, наклоненный под вторым углом относительно продольного направления, при этом указанный второй угол равен двум указанным первым углам;
- подвижный элемент, смещаемый в продольном направлении и способный отклоняться на угол отклонения относительно указанного продольного направления;
- при этом входная и выходная шестерни имеют форму сектора для уменьшения габаритных размеров уравновешивающего механизма;
- устройство толкателя содержит первый и второй уравновешивающие механизмы, при этом каждый уравновешивающий механизм имеет выходную ось, где выходные оси располагаются со смещением относительно друг друга в продольном направлении для уменьшения радиального расстояния, перпендикулярного продольному направлению, между указанными выходными осями и уменьшения радиального размера, перпендикулярного продольному направлению, устройства толкателя;
входные шестерни первого и второго уравновешивающих механизмов находятся в зацеплении друг с другом;
- устройство толкателя содержит ряд модулей, установленных друг за другом в продольном направлении между первой конструкцией и второй конструкцией, при этом каждый модуль обеспечивает часть толкающего усилия на указанную вторую конструкцию таким образом, что сумма указанных частей толкающего усилия равна толкающему усилию устройства толкателя;
- модули из ряда модулей являются идентичными, при этом каждый модуль обеспечивает идентичную часть толкающего усилия;
- устройство толкателя содержит по меньшей мере одну тягу, проходящую через все модули в продольном направлении и предусмотренную для объединения модулей в первую конструкцию, и каждый модуль содержит по меньшей мере один толкатель, предусмотренный принимать указанную часть толкающего усилия, при этом толкатель одного модуля предусмотрен, чтобы толкать толкатель следующего модуля или чтобы толкать вторую конструкцию с толкающим усилием;
- каждый модуль содержит растягивающее устройство, предназначенное для соединения модуля с внешней трубой, жестко соединенной с первой конструкцией;
- между каждым толкателем и следующим за ним толкателем помещен упругий элемент;
- каждый модуль содержит часть внутренней трубы и часть внешней трубы, окружающую часть внутренней трубы, где:
- части внешней трубы жестко соединены друг с другом и с первой конструкцией,
- части внутренней трубы жестко соединены друг с другом и со второй конструкцией, и
- каждый модуль обеспечивает указанную часть усилия на часть внутренней трубы указанного модуля;
- устройство толкателя расположено в кольцеобразном пространстве, расположенном радиально между внутренней трубой, предназначенной для отведения по меньшей мере жидкости внутри указанной внутренней трубы, и внешней трубой, жестко соединенной с первой конструкцией и охватывающей указанное устройство толкателя;
- элементы устройства толкателя жестко соединены друг с другом посредством армирования с последующим шплинтованием для выдерживания механических нагрузок возникающих на указанных соединенных элементах.
Другие характеристики и преимущества настоящего изобретения будут раскрыты в ходе дальнейшего описания двух вариантов его осуществления, приведенных в качестве неограничивающих примеров в сопровождении прилагаемых графических материалов.
На графических материалах:
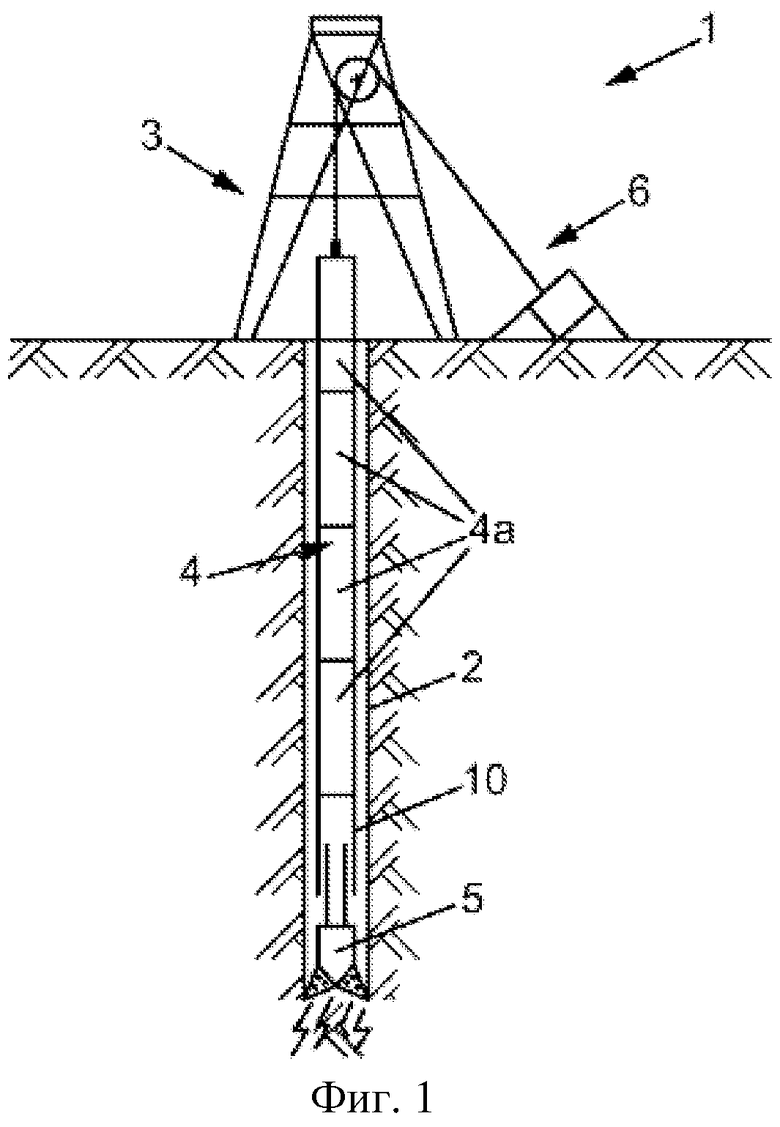
- фиг. 1 представляет собой схематическое изображение буровой системы, содержащей устройство для разъединения согласно настоящему изобретению;
- фиг. 2 представляет собой вид в продольном разрезе первого варианта осуществления устройства для разъединения;
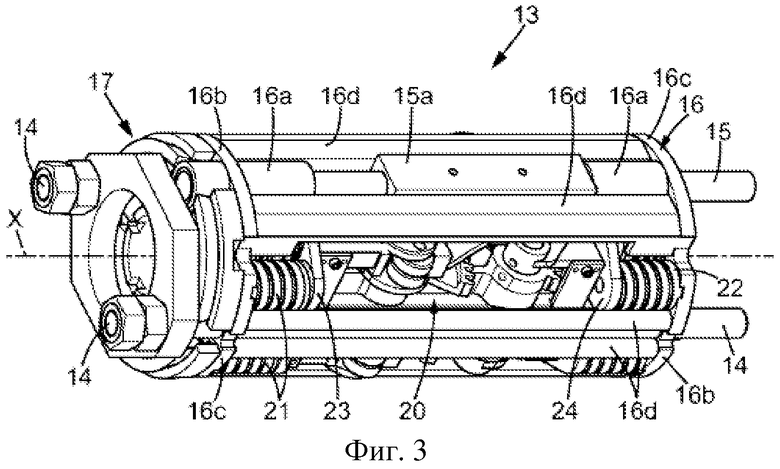
- фиг. 3 представляет собой вид в перспективе модуля устройства для разъединения по фиг. 2;
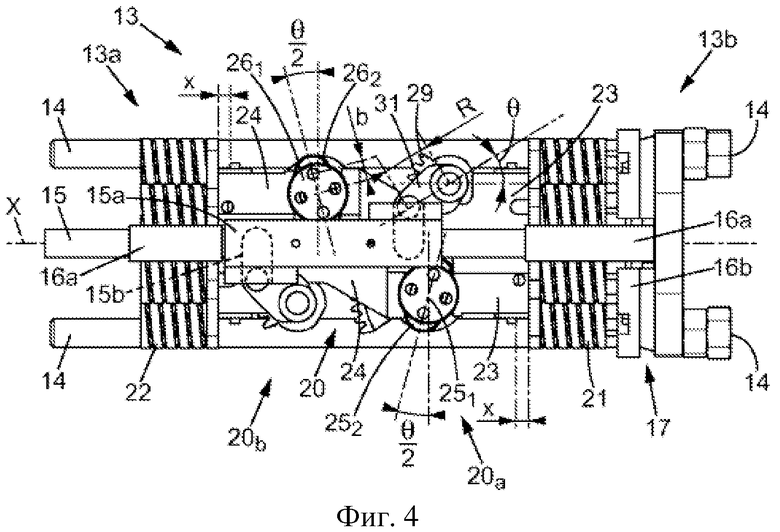
- фиг. 4 представляет собой вид сбоку модуля по фиг. 3;
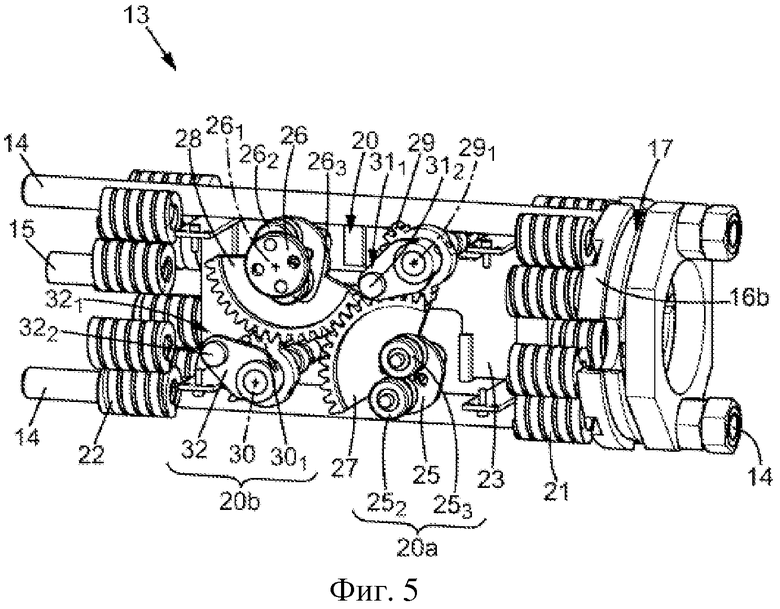
- фиг. 5 представляет собой еще один вид в перспективе модуля по фиг. 3;
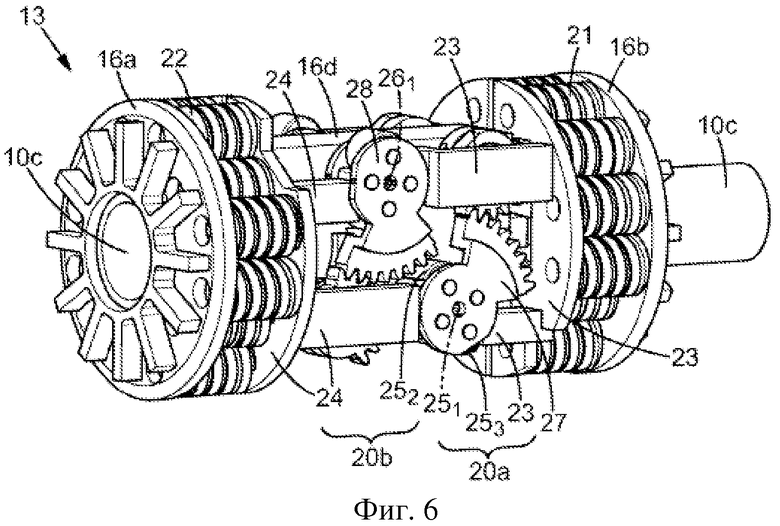
- фиг. 6 представляет собой вид в перспективе модуля второго варианта осуществления устройства для разъединения;
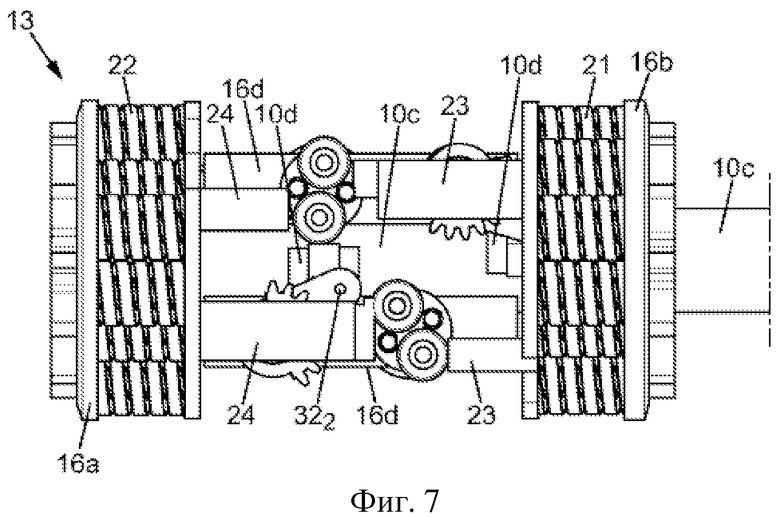
- фиг. 7 представляет собой вид сбоку модуля по фиг. 6, где для наглядности опущены некоторые элементы;
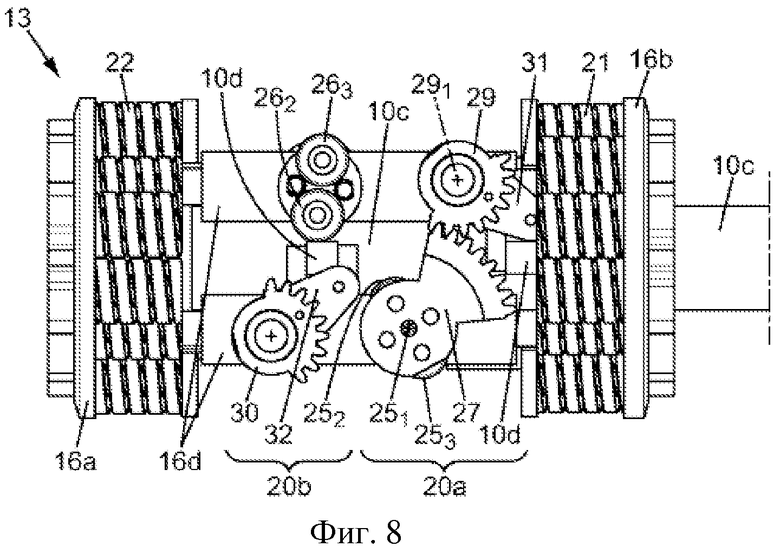
- фиг. 8 представляет собой еще один вид сбоку модуля по фиг. 6, где для наглядности опущены другие элементы.
На разных фигурах одинаковыми ссылками обозначены идентичные или подобные элементы.
Фиг. 1 представляет собой систему 1 для бурения скважины 2, содержащую:
- буровую установку 3, например, на поверхности земли или геологической формации,
- буровую колонну 4, состоящую из буровых труб 4a, жестко соединенных друг за другом в длину для достижения дна скважины, находящегося на определенной глубине от поверхности,
- устройство 10 для разъединения, установленное на нижнем конце буровой колонны 4, и
- режущий инструмент или буровой инструмент, или буровое долото, или бур 5, установленный на нижнем конце устройства 10 для разъединения.
Буровая установка 3, например, содержит буровую вышку для управления трубами, приводное устройство для приведения во вращение буровой колонны 4 и режущий инструмент 5, и устройство 6 для удержания, предусмотренное для управления спуском и повторной установкой буровой колонны 4 в устье выработки скважины 2 и для управления усилием удержания массы буровой колонны 4, чтобы таким образом избежать чрезмерного упора режущего инструмента 5 в геологическую формацию на дне скважины.
На практике масса труб буровой колонны 4 может составлять порядка 100 тонн. Для эффективной работы и умеренного износа режущего инструмента, нагрузка при сопротивлении геологической формации, действующая на режущий инструмент 5, должна составлять порядка 20 тонн, то есть практически 200000 Н. Следовательно, величина усилия удержания устройства 6 удержания должна быть очень велика, и ее тяжело контролировать. Колебания, генерируемые вследствие толчков или ударов режущего инструмента 5 о геологическую формацию, распространяются по трубам от дна скважины до буровой установки 3. Эти колебания обычно используют для контроля величины усилия удержания. Однако такое распространение может занять значительное время, например, более 30 секунд. Контроль, осуществляемый на уровне устройства удержания, может осуществляться только со значительной задержкой, что повышает сложность контроля усилия удержания.
Фиг. 2 представляет собой первый вариант осуществления устройства 10 для разъединения буровой колонны. Данное устройство располагается в продольном направлении X и содержит:
- первую конструкцию 11, или верхний соединительный элемент, предназначенный для прикрепления к трубе буровой колонны,
- вторую конструкцию 12, или нижний соединительный элемент, предназначенный ля поддержания бурового режущего инструмента.
Вторая конструкция 12 является подвижной, перемещаясь в продольном направлении Х относительно первой конструкции 11.
Устройство 10 для разъединения содержит внутреннюю трубу 10a, предназначенную для отведения по меньшей мере жидкости внутри указанной внутренней трубы, и внешнюю трубу 10b жестко соединенную с первой конструкцией 11 и охватывающую снаружи устройство для 10 разъединения практически по всей длине в продольном направлении Х. Внутренняя труба 10a и/или наружная труба 10b при необходимости могут быть выполнены посредством соединения патрубков для облегчения установки устройства 10 для разъединения.
Например, внешняя труба 10b может иметь средний диаметр между 200 мм и 600 мм. Например, внутренняя труба 10a может иметь средний диаметр между 40 мм и 200 мм.
Устройство для разъединения 10 содержит устройство толкателя, включающее модули 13, например, в количестве 10 шт., отдельно обозначенные ссылками 131 - 1310, при этом данные модули установлены в ряд один за другим в продольном направлении X между первой конструкцией 11 и второй конструкцией 12 внутри внешней трубы 10b. Модули 13 являются абсолютно идентичными в варианте осуществления по фиг. 2, но возможно установить различные модули с различными характеристиками.
Каждый модуль 13 содержит:
- опорную конструкцию 16, при этом опорные конструкции 16 ряда или блока модулей 13 жестко соединены между собой посредством тяг 14, проходящих через них и соединяющих их с первой конструкцией 11,
- два толкателя 15, проходящие через них в продольном направлении X и предназначенные для сообщения перемещения второй конструкции 12, и
- уравновешивающие механизмы 20 предусмотренные для осуществления толкающего усилия толкателей 15 в продольном направлении X, способствующего их перемещению.
Толкающее усилие каждого уравновешивающего механизма 20 является практически постоянным для любого положения толкателей 15 относительно опорной конструкции 16, то есть любого направления второй конструкции 12 относительно первой конструкции 11.
Протяженность перемещения толкателей 15 составляет, например, от 50 мм до 200 мм, например 90 мм для представленного варианта осуществления.
Толкатели 15 последнего модуля 131 вблизи второй конструкции 12 или режущего инструмента 5 действуют или осуществляют толкающее усилие на вторую конструкцию 12, а толкатели 15 других модулей 132 - 1310 действуют или осуществляют толкающее усилие на соответствующие толкатели 15 следующего модуля 131 - 139.
Модули 13 могут быть расположены под углом относительно друг друга посредством центрирующих элементов.
Упругие элементы (не представлены) также могут быть помещены между толкателями 15 смежных последовательных модулей, во избежание любых проявлений гиперстатики соединений между модулями, и блокировки устройства для разъединения 10 во время его работы.
Каждый модуль 13 передает толкающее усилие следующему, и они действуют параллельно, при этом вторая конструкция 12 подвергается толкающему усилию, которое является суммой толкающих усилий всех уравновешивающих механизмов 20 всех модулей 13 устройства 10 для разъединения.
Согласно настоящему варианту осуществления, устройство толкателя содержит десять модулей 13, каждый из которых содержит четыре уравновешивающих механизма. Модули 13 являются практически идентичными и производят одинаковое толкающее усилие. Конструкция 12 подвергается толкающему усилию, практически равному десятикратному усилию модулей 13 устройства для разъединения или в сорок раз превышающему усилие уравновешивающих механизмов.
Например, если вторая конструкция 12 должна выдерживать общее толкающее усилие, равное 200000 Н, каждый модуль 13 производит усилие 20000 Н, а каждый уравновешивающий механизм производит усилие 5000 Н.
Фиг. 3, 4 и 5 представляют собой подробные изображения модуля 13 устройства для разъединения 10. Данный модуль 13 содержит:
- опорную конструкцию 16, соединенную с первой конструкцией 11 посредством тяг 14,
- два толкателя 15, проходящих в продольном направлении X, и
- уравновешивающие механизмы 20 для осуществления толкающего усилия в продольном направлении X, действующего на толкатели 15.
Каждый модуль 13 расположен в цилиндрическом кольцеобразном пространстве, проходящем радиально между внутренней трубой 10a и внешней трубой 10b устройства для разъединения 10.
Каждый модуль 13 содержит устройство 17 радиального расширения, соединенное с опорной конструкцией 16 и предназначенное для жесткого соединения с модулем 13 внутри внешней трубы 10b. Модуль 13, таким образом, расположен во внешней трубе 10b, жестко соединен с внешней трубой, задействуя при этом механизм радиального расширения 17, перед размещением следующего модуля 13 во внешней трубе 10b. Модули 13 фиксируются таким образом во внешней трубе 10b, и каждый из них передает свое усилие и нагрузку трубе, таким образом, чтобы снизить проявления гиперстатики, и чтобы внешняя труба 10b могла деформироваться, и в частности сгибаться при использовании в устье буровой скважины, не влияя на работу каждого модуля 13 устройства для разъединения.
Опорная конструкция 16 имеет форму жесткого каркаса, содержащего первую опорную плиту 16b на первом продольном конце модуля, вторую опорную плиту 16c на втором продольном конце модуля, при этом каждая опорная плита расположена в плоскости, практически перпендикулярной продольному направлению, и продольные балки 16d, соединяющие первую опорную плиту 16b со второй опорной плитой 16c. Эта опорная конструкция 16 также содержит направляющие подшипники 16a, установленные на первой и второй опорных плитах 16b, 16c для направления передачи толкателей 15 к опорной конструкции 16 на всей протяженности перемещения.
Направляющие 15a жестко закреплены в средней части каждого толкателя 15, чтобы принимать толкающее усилие уравновешивающего механизма 20.
Каждый толкатель 15 таким образом может перемещаться в опорной конструкции 16 между первым и вторым подшипником 16a. Направляющая 15a также может иметь упор между этими подшипниками для ограничения перемещения толкателя 15 в опорной конструкции 16.
Уравновешивающий механизм 20 трансформирует усилие сжатия x упругого элемента во вращение на первый угол θ1 входного рычага, затем во вращение на второй угол θ2 выходного рычага. Первый угол θ1 имеет величину, равную половине величины второго угла θ2: θ1 = θ2 /2 = θ/2.
Раскрытие принципа работы подобного уравновешивающего механизма можно найти в патентной публикации FR-2627718, а также в патентной публикации FR-2814449. Однако уравновешивающий механизм 20 устройства 10 для разъединения согласно настоящему изобретению осуществлен иным способом вследствие уменьшенного размера модуля 13 и его в целом цилиндрической формы. Кроме того, настоящее устройство 10 для разъединения содержит направляющую второй конструкции относительно первой конструкции, таким образом, чтобы она компенсировала усилие, действующее в любом направлении, и вес нагрузки не только в вертикальном направлении.
Фиг. 4 и 5 демонстрируют модуль 13, в котором удалены некоторые элементы для большей наглядности уравновешивающего узла, содержащего два уравновешивающих механизма 20a, 20b, взаимосвязанных друг с другом, как описано ниже.
Данный уравновешивающий узел содержит:
- первый упругий элемент 21 на первом конце 13a модуля 13, содержащий, например, четыре металлические спиралевидные пружины, упирающиеся в продольном направлении X, с одной стороны в первую опорную плиту 16b, а с другой стороны в первый подвижный элемент 23,
- второй упругий элемент 22 на втором конце 13b модуля 13, содержащий, например, также четыре металлические спиралевидные пружины, упирающиеся в продольном направлении X, с одной стороны в опорную плиту 16c, а с другой стороны во второй подвижный элемент 24.
Первый и второй упругие элементы 21, 22 расположены внутри опорной конструкции 16 напротив друг друга в направлении внутренней части модуля, то есть центральной части или зоны указанного модуля 13. Они установлены с предварительным напряжением и действуют на каждый из подвижных элементов 23, 24, таким образом, что последние имеют тенденцию смещаться в сторону друг друга. Таким образом, каждый из подвижных элементов 23, 24 имеет поверхность, расположенную напротив поверхности другого элемента.
Первый уравновешивающий механизм 20a содержит:
- первый входной рычаг 25 шарнирно присоединенный с возможностью вращения вокруг средней входной оси 251 относительно опорной конструкции 16 модуля 13, содержащего на каждом из своих концов с обеих сторон от входной оси 251 ролик 252, 253, с возможностью вращения относительно указанного первого входного рычага 25, при этом первый ролик 252 вступает в контакт с поверхностью второго подвижного элемента 24, второй ролик 253 вступает в контакт с поверхностью первого подвижного элемента 23,
- первую входную шестерню 27, жестко соединенную с указанным первым входным рычагом 25,
- первую выходную шестерню 29, шарнирно соединенную с возможностью вращения вокруг выходной оси 291 относительно опорной конструкции 16 модуля 13, и входящую в зацепление с первой входной шестерней 27 посредством предусмотренных зубцов первой входной и выходной шестерен 27, 29,
- первый выходной рычаг 31, проходящий между выходной осью 291 и концом 311, жестко соединенным с указанной первой выходной шестерней 29, и содержащий на своем конце 311 ролик 312, установленный с возможностью вращения относительно указанного выходного рычага 31, при этом указанный ролик 312 вступает в контакт с поверхностью соединения, практически перпендикулярной продольному направлению направляющей 15a.
Первый входной рычаг 25 наклонен на первый угол θ1 = θ/2 относительно направления, практически перпендикулярного продольному направлению X.
Первый выходной рычаг 31 наклонен на второй угол θ2 = θ относительно продольного направления.
Второй уравновешивающий механизм 20b подобен первому уравновешивающему механизму 20a. Он содержит:
- второй входной рычаг 26 шарнирно присоединенный с возможностью вращения вокруг средней входной оси 261 относительно опорной конструкции 16 модуля 13, содержащего на каждом из своих концов с обеих сторон от входной оси 261 ролик 262, 263, с возможностью вращения относительно указанного первого входного рычага 26, при этом первый ролик 262 вступает в контакт с поверхностью второго подвижного элемента 24, второй ролик 263 вступает в контакт с поверхностью первого подвижного элемента 23,
- вторую входную шестерню 28, жестко соединенную с указанным вторым входным рычагом 26,
- вторую выходную шестерню 30, шарнирно соединенную с возможностью вращения вокруг выходной оси 301 относительно опорной конструкции 16 модуля 13, и входящую в зацепление со второй входной шестерней 28 посредством предусмотренных зубцов второй входной и выходной шестерен 28, 30,
- второй выходной рычаг 32, проходящий между выходной осью 301 и концом 321, жестко соединенным с указанной второй выходной шестерней 30, и содержащий на своем конце 321 ролик 312, установленный с возможностью вращения относительно указанного выходного рычага 32, при этом указанный ролик 312 вступает в контакт с поверхностью соединения, практически перпендикулярной продольному направлению направляющей 15a.
Второй входной рычаг 26 наклонен на третий угол θ3 = -θ/2 относительно направления, практически перпендикулярного продольному направлению, при этом указанный третий угол противоположен первому углу.
Второй выходной рычаг 32 наклонен на четвертый угол θ4 = -θ относительно продольного направления, при этом указанный четвертый угол противоположен второму углу.
Также первая входная шестерня 27 первого механизма 20a входит в зацепление со второй входной шестерней 28 второго механизма 20b, таким образом, что первая и вторая входные шестерни 27, 28 вращаются в противоположных направлениях. Первый и второй уравновешивающие механизмы практически симметричны относительно продольного направления. Первый и второй выходные рычаги 32, 32 также вращаются в различных направлениях. Но эти выходные рычаги, находясь с обеих сторон от направляющей 15a толкателя 15, оба толкают толкатель 15 в одном направлении, объединяя таким образом свои толкающие усилия.
Благодаря геометрии каждого уравновешивающего механизма 20 (углы рычагов), эти уравновешивающие механизмы передают направляющей 15a постоянное толкающее усилие независимо от положения направляющей 15a между направляющими подшипниками 16a, при этом указанное толкающее усилие направлено в продольном направлении X.
Фиг. 6 - 8 представляют собой второй вариант осуществления устройства для разъединения 10. По сравнению с первым вариантом осуществления, данный вариант является упрощенным. Он не содержит ни тяги, ни толкателя, ни устройства радиального расширения.
Во втором варианте осуществления, каждый модуль 13 содержит внешний патрубок (не представленный), который одновременно служит для предоставления модулю 13 опоры, как это делают продольные балки 16d опорной конструкции первого варианта осуществления, а также для передачи первой конструкции 11 ответного усилия сопротивления толкающему усилию модулей 13, как это делают тяги 14 первого варианта осуществления.
Каждый модуль 13 содержит также патрубок внутренней трубы 10c, предназначенный для передачи толкающего усилия модулей 13, как это делают толкатели 15 первого варианта осуществления.
Внешняя труба данного варианта осуществления таким образом не выполнена как единая деталь, и следовательно модули 13 не установлены последовательно друг за другом внутри внешней трубы. Патрубок внешней трубы образует часть модуля 13, где данные модули 13 просто установлены друг за другом, при этом каждый патрубок внешней трубы приспособлен для жесткого соединения со следующим или с первой конструкцией.
Внутренняя труба 10a второго варианта осуществления также выполнена посредством соединения патрубков 10c внутренней трубы каждого модуля 13. Каждый патрубок внутренней трубы 10c также содержит выступы 10d с поверхностями соединения, благодаря которым ролики 312, 322 выходных рычагов 31, 32 могут толкать указанные патрубки 10c внутренней трубы в продольном направлении.
Благодаря таким конструкциям модули 13 упрощены и их сборка также упрощена.
Удаленные элементы первого варианта осуществления избавляют от объема для уменьшения элементов, оставшихся среди основных. Таким образом они становятся более прочными. Также это позволяет размещать в каждом модуле 13 больше металлических пружин для создания упругих элементов 21, 22. Как следствие, модуль 13 второго варианта осуществления более производительный, то есть он способен предоставить большее толкающее усилие при таком же размере.
Кроме того, во втором варианте осуществления первая входная шестерня 27 первого уравновешивающего механизма 20a больше не входит в зацепление со второй входной шестерней 28 второго уравновешивающего механизма 20b (фиг. 6). Уравновешивающие механизмы 20 данного варианта осуществления являются более независимыми друг от друга.
Первый и второй подвижные элементы 23, 24 могут перемещаться не только в продольном направлении X, но также в соответствии с углами отклонения от этого продольного направления. Эти угловые отклонения амортизируются упругостью упругих элементов 21, 22, и не приводят при вращении к наложению с первой и второй входных шестерен 27, 28, ни с первой и второй выходных шестерен 29, 30, при этом указанные шестерни шарнирно соединены с возможностью вращения относительно продольной балки 16d опорной конструкции.
Таким образом, снижается вероятность гиперстатики или блокирования устройства для разъединения.
Кроме того, входные шестерни 27, 28 могут быть выполнены в виде сектора с более острым углом. Этот угол может быть, например, более 90°, и близкий к 180° для входных шестерен 27, 28 первого варианта осуществления (фиг. 5), тогда как он, например, менее 45° для входных шестерен 27, 28 второго варианта осуществления (фиг. 6).
Таким образом, шестерни занимают меньший объем в модуле 13.
Благодаря таким конструкциям, возможно разместить большее количество металлических пружин для создания упругих элементов 21, 22. Модуль 13 таким образом становится еще более производительным. Эти модификации также могут быть применены в первом варианте осуществления настоящего изобретения.
Для всех вариантов осуществления настоящего изобретения устройство для разъединения может содержать:
- датчик перемещения для определения положения второй конструкции 12 относительно первой конструкции 11, и
- устройство передачи для передачи данных об указанном положении к устройству 6 удержания для управления усилием удержания буровой колонны.
Благодаря данной информации о положении возможно лучше контролировать усилие удержания, которое требуется от устройства удержания 6, и в частности при необходимости уменьшать или увеличивать это усилие удержания в зависимости от указанного положения.
Устройство 10 для разъединения такой управляемой системы таким образом чаще всего находится в состоянии, когда вторая конструкция 12 не упирается в первую конструкцию 11. В этом состоянии вторая конструкция 12 принимает предопределенное толкающее усилие, установленное для хорошего функционирования режущего инструмента 5. В свою очередь, режущий инструмент 5 защищен от любого ответного усилия сопротивления, превышающего указанное предопределенное толкающее усилие.
Устройство для разъединения может применяться для точного определения глубины вруба DOC (от “Depth Of Cut” на английском).
Обычно глубина вруба DOC определяется в устье скважины путем измерения продвижения вперед буровой колонны 4 в скважине и вращением этой буровой колонны.
Однако буровая колонна не является полностью жесткой, и она гнется, сжимается и испытывает деформацию кручения по своей оси. Следовательно, реальное вращение и продвижение вперед инструмента в геологической формации с точностью не известно. Путем расчетов должны быть внесены коррективы, но величины на уровне инструмента 5 у дна скважины остаются неизвестными, так что определенные вычисленные значения глубины вруба являются неточными.
Устройство для разъединения согласно настоящему изобретению теперь позволяет получить непосредственно эту глубину вруба DOC. В результате, вторая конструкция 12 устройства для разъединения практически неподвижно закреплена относительно геологической формации и перемещение второй конструкции относительно второй конструкции соответствует продвижению вперед режущего инструмента 5 в геологической формации.
Таким образом, глубина вруба DOC может быть определена при осуществлении следующих этапов, на которых:
- определяют усилие удержания буровой колонны, при этом указанное усилие удержания остается постоянным,
- бурят предопределенное расстояние геологической формации, причем это расстояние составляет расстояние между первой и второй конструкциями устройства 10 для разъединения, и меньше хода устройства для разъединения 10,
- измеряют угол, соответствующий углу вращения режущего инструмента 5 для бурения указанного предопределенного расстояния, и
- определяют глубину вруба DOC для указанной геологической формации относительно предопределенного расстояния посредством измеренного угла.
Альтернативно, глубина вруба может быть определена при выполнении следующих этапов, на которых:
- определяют усилие удержания буровой колонны, при этом указанное усилие удержания остается постоянным,
- бурят до предопределенного угла вращения режущего инструмента 5 в геологической формации,
- измеряют расстояние, соответствующее продвижению вперед режущего инструмента 5 при бурении до предопределенного угла, при этом указанное расстояние является расстоянием между первой и второй конструкциями устройства 10 для разъединения, и
- определяют глубину вруба DOC для указанной геологической формации, относительно измеренного расстояния посредством предопределенного угла.
Прилагаемое усилие удержания может быть равно нулю. В этом случае тормозное устройство устройства 6 удержания полностью ослабляется, и весь вес буровой колонны 4 прикладывается к устройству 10 для разъединения и режущему инструменту 5.
В результате такое использование устройства 10 для разъединения очень полезно для определения физических параметров геологической формации, и, например, сопротивления породы на месте CCS (от англ. “Confined Compressive Strength”).
Такое сопротивление на месте может быть вычислено по модели кинематической пары режущего инструмента 5.
Модель кинематической пары описывается в документе: “A Phenomenological Model for the Drilling Action of Drag Bits”, E. Detournay, P. Defourny, International Journal of Rock Mechanics and Mining Sciences & Geomechanics Abstracts, Том 29, №°l, январь 1992, стр. 13-23.
В данном документе равенство 22 связывает кинематическую пару T, вес W и глубину вруба δ (здесь DOC):

- где T - кинематическая пара вращения буровой колонны 4,
- a - радиус режущего инструмента 5,
- μ - коэффициент трения режущего инструмента в геологической формации,
- γ - число, моделирующее влияние направления и распределения сил при контакте между режущим инструментом 5 и геологической формацией,
- ζ - число, характеризующее уклон силы кинематической пары, действующей на режущий элемент 5,
- ε - собственная удельная энергия, то есть энергия, необходимая для выработки единицы объема породы в геологической формации (Дж/м3 или MПa) ,
- δ - (или DOC) - глубина вруба, и
- W - вес, прикладываемый к режущему инструменту 5.
Удельная энергия ε соответствует сопротивлению породы на месте CCS.
Кинематическая пара T и вес W хорошо известны.
Точное знание глубины вруба δ (или DOC) позволяет точно определить с помощью вышеуказанного равенства собственную удельную энергию ε, то есть сопротивление породы на месте CCS.
Изобретение относится буровому инструменту. Техническим результатом является снижение нагрузок, испытываемых режущим инструментом при сопротивлении в продольном направлении. Предложено устройство для разъединения буровой колонны, содержащее в продольном направлении первую конструкцию, предназначенную для прикрепления к трубе буровой колонны, вторую конструкцию, предназначенную для поддержания бурового режущего инструмента и подвижную относительно первой конструкции, и узел толкателя между указанной первой конструкцией и указанной второй конструкцией. При этом узел толкателя предусмотрен для осуществления толкающего усилия на указанную вторую конструкцию для отведения указанной второй конструкции от указанной первой конструкции, при этом указанное толкающее усилие является постоянным для любого положения второй конструкции относительно первой конструкции. Кроме того, узел толкателя содержит уравновешивающий механизм, содержащий упругий элемент и выходной рычаг, и устройство для соединения между указанным выходным рычагом и указанной второй конструкцией для приложения толкающего усилия в продольном направлении. При этом упругий элемент производит упругое усилие, пропорциональное сжатию упругого элемента. Выходной рычаг соединен с указанным упругим элементом и способен вращаться вокруг выходной оси. Раскрыты также буровая система, содержащая указанное устройство, и применение этой буровой системы. 4 н. и 18 з.п. ф-лы, 8 ил.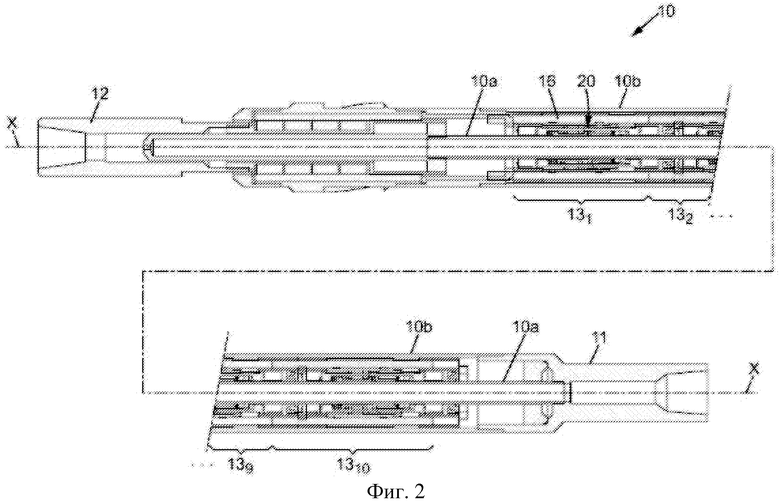
1. Устройство (10) для разъединения буровой колонны, содержащее в продольном направлении (X):
- первую конструкцию (11), предназначенную для прикрепления к трубе буровой колонны,
- вторую конструкцию (12), предназначенную для поддержания бурового режущего инструмента, при этом указанная вторая конструкция (12) является подвижной, перемещаясь относительно первой конструкции (11) в продольном направлении (X),
где указанное устройство для разъединения отличается тем, что кроме прочего содержит узел толкателя между указанной первой конструкцией и указанной второй конструкцией, указанный узел толкателя предусмотрен для осуществления толкающего усилия на указанную вторую конструкцию (12) для отведения указанной второй конструкции от указанной первой конструкции, при этом указанное толкающее усилие является практически постоянным для любого положения второй конструкции относительно первой конструкции, при этом
вторая конструкция (12) направлена относительно первой конструкции (11) в продольном направлении (X), и устройство толкателя содержит, по меньшей мере:
- уравновешивающий механизм (20), содержащий упругий элемент (21, 22) и выходной рычаг (31), при этом упругий элемент (21, 22) производит упругое усилие, пропорциональное сжатию (х) упругого элемента, выходной рычаг (31) соединен с указанным упругим элементом (21, 22) и способен вращаться вокруг выходной оси (291), и
- устройство для соединения между указанным выходным рычагом (31) и указанной второй конструкцией (12), для приложения указанного толкающего усилия к указанной второй конструкции (12) в указанном продольном направлении (X), причем указанное устройство для соединения содержит шарнирно присоединенный ролик (312) с возможностью вращения относительно выходного рычага (31) на расстоянии от указанной выходной оси (291), опирающийся на поверхность соединения, связанную со второй конструкцией (12) и практически перпендикулярную продольному направлению (Х).
2. Устройство по п. 1, отличающееся тем, что уравновешивающий механизм (20) кроме прочего содержит:
- подвижный элемент (23, 24), перемещающийся при сжатии (х) упругого элемента,
- входной рычаг (25), шарнирно присоединенный с возможностью вращения относительно входной оси (251) и содержащий часть конца, контактирующего с поверхностью подвижного элемента (23, 24), при этом указанный входной рычаг (25) наклонен под первым углом относительно перпендикулярного направления в продольном направлении (X),
- входную шестерню (27), жестко соединенную с указанным входным рычагом (25), и
- выходную шестерню (29), жестко соединенную с выходным рычагом (31) и находящуюся в зацеплении с указанной входной шестерней (27), и
- выходной рычаг (31), наклоненный под вторым углом относительно продольного направления (X), при этом указанный второй угол равен двум указанным первым углам.
3. Устройство по п. 2, отличающееся тем, что подвижный элемент (23) перемещается в продольном направлении (X) и способен отклоняться на угол отклонения относительно указанного продольного направления.
4. Устройство по п. 2, отличающееся тем, что входная шестерня (27) и выходная шестерня (29) имеет форму сектора для уменьшения габаритных размеров уравновешивающего механизма.
5. Устройство по п. 1, отличающееся тем, что устройство толкателя содержит первый и второй уравновешивающие механизмы (20а, 20b), при этом каждый уравновешивающий механизм имеет выходную ось, где выходные оси (291, 301) расположены со смещением относительно друг друга в продольном направлении (X), для уменьшения радиального расстояния, перпендикулярного продольному направлению, между указанными выходными осями и уменьшения радиального размера, перпендикулярного продольному направлению, устройства толкателя;
6. Устройство по пп. 5 и 2, отличающееся тем, что входные шестерни (27, 28) первого и второго уравновешивающих механизмов (20а, 20b) находятся в зацеплении друг с другом.
7. Устройство по п. 1, отличающееся тем, что устройство толкателя содержит ряд модулей (13), установленных друг за другом в продольном направлении между первой конструкцией (11) и второй конструкцией (12), при этом каждый модуль (13) обеспечивает часть толкающего усилия на указанную вторую конструкцию (12), таким образом, что сумма указанных частей толкающего усилия модулей (13) равна толкающему усилию устройства толкателя.
8. Устройство по п. 7, отличающееся тем, что модули (13) являются идентичными, при этом каждый модуль обеспечивает идентичную часть толкающего усилия.
9. Устройство по п. 7, отличающееся тем, что устройство толкателя содержит по меньшей мере одну тягу (14), проходящую через все модули в продольном направлении (X) и предусмотренную для объединения модулей (13) в первую конструкцию (11), и каждый модуль (13) содержит по меньшей мере один толкатель (15), предусмотренный принимать указанную часть толкающего усилия, при этом толкатель (15) одного модуля (13) предусмотрен, чтобы толкать толкатель (15) следующего модуля или чтобы толкать вторую конструкцию (12) с толкающим усилием.
10. Устройство по п. 9, отличающееся тем, что каждый модуль (13) содержит растягивающее устройство (17), предназначенное для соединения модуля (13) с внешней трубой (10b), жестко соединенной с первой конструкцией (11).
11. Устройство по п. 9, отличающееся тем, что между каждым толкателем (15) и следующим за ним толкателем помещен упругий элемент.
12. Устройство по п. 7, отличающееся тем, что каждый модуль (13) содержит часть внутренней трубы (10с) и часть внешней трубы, окружающую часть внутренней трубы, где:
части внешней трубы жестко соединены друг с другом и с первой конструкцией (11),
части внутренней трубы жестко соединены друг с другом и со второй конструкцией (12), и
каждый модуль (13) обеспечивает указанную часть усилия на часть внутренней трубы (10с) указанного модуля.
13. Устройство по п. 1, отличающееся тем, что устройство толкателя расположено в кольцеобразном пространстве, расположенном радиально между внутренней трубой (10а), предназначенной для отведения, по меньшей мере, жидкости внутри указанной внутренней трубы, и внешней трубой (10b), жестко соединенной с первой конструкцией и охватывающей указанное устройство толкателя.
14. Устройство по п. 1, отличающееся тем, что элементы устройства толкателя жестко соединены друг с другом посредством армирования с последующим шплинтованием для выдерживания механических нагрузок, возникающих на указанных соединенных элементах.
15. Буровая система (1), содержащая устройство (10) для разъединения по любому из пп. 1-13, и содержащая кроме прочего:
- буровую колонну (4), содержащую по меньшей мере одну трубу (4а), где указанная буровая колонна соединена с первой конструкцией (11) устройства (10) для разъединения,
- режущий инструмент (5), предназначенный для бурения геологической формации, где режущий инструмент (5) соединен со второй конструкцией (12) устройства (10) для разъединения, и
- устройство (6) удержания буровой колонны (4) в устье выработки скважины, предусмотренное для управления спуском буровой колонны и повторной установкой буровой колонны в буровой скважине.
16. Система по п. 15, отличающаяся тем, что устройство (10) для разъединения содержит по меньшей мере один датчик перемещения для определения положения второй конструкции (12) относительно первой конструкции (11), при этом система содержит устройство передачи для передачи данных об указанном положении к устройству (6) удержания для управления усилием удержания буровой колонны (4).
17. Система по п. 16, отличающаяся тем, что усилие удержания буровой колонны (4) повышается, если положение указывает на то, что вторая конструкция (12) расположена вблизи от первой конструкции (11), и усилие удержания буровой колонны понижается, если положение указывает на то, что вторая конструкция (12) отдалена от первой конструкции (11).
18. Применение буровой системы по п. 16 для определения глубины вруба, при котором:
- определяют усилие удержания буровой колонны, при этом указанное усилие удержания сохраняется постоянным,
- бурят предопределенное расстояние в толще геологической формации, при этом данное расстояние является меньшим, чем ход устройства (10) для разъединения,
- измеряют угол, соответствующий углу вращения режущего инструмента (5) при бурении указанного определенного расстояния, и
- определяют глубину вруба (DOC) указанной геологической формации, относительно расстояния, предопределенного посредством измеренного угла.
19. Применение буровой системы по п. 16 для определения глубины вруба, отличающееся тем, что:
- определяют усилие удержания буровой колонны, при этом указанное усилие удержания сохраняется постоянным,
- бурят геологическую формацию до предопределенного угла вращения режущего инструмента (5),
- измеряют соответствующее расстояние продвижения режущего инструмента (5) при бурении до предопределенного угла вращения, при этом указанное расстояние является расстоянием между первой и второй конструкцией устройства (10) для разъединения, и
- определяют глубину вруба (DOC) указанной геологической формации относительно расстояния, предопределенного посредством измеренного угла.
20. Применение по п. 18 или п. 19, отличающееся тем, что усилие удержания равно нулю.
21. Применение по любому из пп. 18 и 19, отличающееся тем, что глубина вруба (DOC) позволяет определить сопротивление породы на дне скважины (CCS) исходя из модели кинематической пары режущего инструмента (5).
22. Применение по п. 20, отличающееся тем, что глубина вруба (DOC) позволяет определить сопротивление породы на дне скважины (CCS) исходя из модели кинематической пары режущего инструмента (5).
| US4281726 A1, 04.08.1981 | |||
| БУРОВОЙ НАДДОЛОТНЫЙ АМОРТИЗАТОР | 1987 |
|
SU1816023A1 |
| Асинхронный двигатель с маховиком | 1924 |
|
SU1487A1 |
| US 4186569 A1, 05.02.1979 | |||

