Область техники
Настоящее изобретение относится к мобильному роботу, такому как робот-пылесос и более конкретно - к устройству и способу для определения положения объекта для мобильного робота.
Предшествующий уровень техники
В общем, мобильный робот-пылесос (далее, «робот-пылесос») это устройство для автоматической уборки помещения посредством всасывания мусора, такого как пыль с пола, при перемещении с места на место в помещении (например, жилом помещении) без манипулирования со стороны пользователя.
При уборке робот-уборщик определяет расстояние от самого себя до препятствия, такого как мебель, офисное оборудование или стена в помещении, где требуется уборка посредством датчика расстояния и избирательно управляет приводом для вращения левого колеса и приводом для вращения правого колеса согласно определенному расстоянию, чтобы изменять свое направление и автоматически убирать помещение. Робот-уборщик выполняет операцию уборки при передвижении по помещению с помощью картографической информации, сохраненной во внутреннем запоминающем устройстве.
Например, робот-уборщик содержит гироскопический датчик для определения направления движения робота-уборщика, кодирующее устройство для измерения расстояния, на которое переместился робот, посредством определения числа вращений колеса робота-уборщика, ультразвуковой датчик для определения расстояния между роботом-уборщиком и объектом, и датчик инфракрасного излучения для определения препятствия, и множество других датчиков.
Однако известный робот-уборщик имеет недостатки, заключающиеся в том, что на роботе установлено множество дорогостоящих датчиков, чтобы уборка помещения осуществлялась точно по предварительно установленному пути, но это усложняет внутреннюю структуру и приводит к увеличению стоимости производства.
Для устранения указанных проблем был создан робот-уборщик, который выполняет уборку помещения при передвижении вдоль произвольного пути, заданного случайным образом.
Ниже описано известное устройство для управления роботом-уборщиком в соответствии с известной технологией.
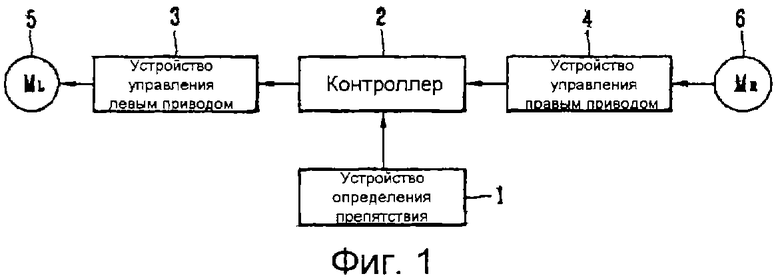
На фиг.1 представлена блок-схема известного устройства для управления роботом-уборщиком.
Известное устройство для управления роботом-уборщиком содержит блок 1 определения препятствия по величине удара, генерируемой, когда робот-уборщик, перемещающийся прямо вперед в заданном направлении, сталкивается с препятствием, генерирует сигнал определения препятствия, контроллер 2 для остановки движения робота-уборщика, на основе сигнала определения препятствия, генерируемого блоком 1 определения препятствия, генерирующего по случайному закону случайный угол, и генерирующего управляющий сигнал для вращения робота-уборщика согласно случайному углу, блок 3 управления левым приводом для вращения левого привода (ML) 5 робота-уборщика в некотором направлении и на некоторой определенной скорости согласно сигналу управления контроллера 2, и блок 4 управления правым приводом для вращения правого привода (MR) 6 робота-уборщика в некотором направлении и на некоторой определенной скорости согласно управляющему сигналу контроллера 2.
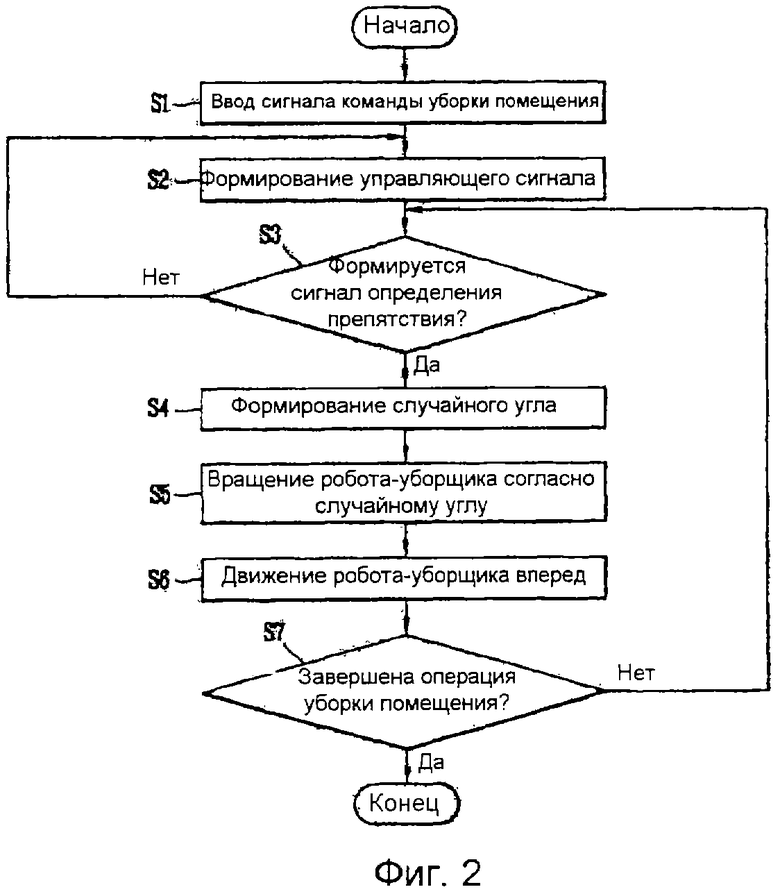
На фиг.2 представлена блок-схема последовательности операций способа управления роботом-уборщиком.
Пользователь вводит сигнал команды уборки (этап S1), контроллер 2 генерирует управляющий сигнал, чтобы сделать скорость вращения левого привода 5 и правого привода 6 были равными, чтобы движение робота-уборщика осуществлялось прямо вперед, и одновременно подает управляющий сигнал блоку 3 управления левым приводом и блоку 4 управления правым приводом (этап S2).
Блок 3 управления левым приводом вращает левый привод 5 согласно управляющему сигналу контроллера 2. В это время блок 4 управления правым приводом также вращает правый привод 6 согласно управляющему сигналу контроллера 2. Поскольку левый и правый приводы 5 и 6 вращаются одновременно, робот-уборщик перемещается прямо вперед.
Блок 1 определения препятствия определяет препятствие по величине удара, генерируемой, когда робот-уборщик сталкивается с препятствием, формирует сигнал определения препятствия и направляет этот сигнал определения препятствия к контроллеру 2 (этап S3). Если сигнал определения препятствия не генерируется, робот-уборщик продолжает выполнять уборку помещения.
Контроллер 2 останавливает движение робота-уборщика согласно сигналу определения препятствия, для чего генерирует по случайному закону случайный угол (этап S4), генерирует управляющий сигнал для вращения робота-уборщика согласно этому случайному углу и затем выводит управляющий сигнал на блоки 3 и 4 управления левым и правым приводами.
Блок 3 управления левым приводом вращает левый привод 5 согласно управляющему сигналу контроллера 2, а блок 4 управления правым приводом вращает правый привод 6 согласно управляющему сигналу контроллера 2. Другими словами, посредством относительного управления скоростью вращения левого привода 5 и скоростью вращения правого привода 6 по отдельности направление движения робота-уборщика можно изменять посредством задания случайного угла (этап S5).
Затем, когда робот-уборщик поворачивается на случайный угол, контроллер 2 позволяет роботу-уборщику вновь двигаться прямо вперед (этап S6). Когда операция уборки завершается, контроллер 2 завершает операцию (этап S7). Если операция уборки не завершается, контроллер 2 позволяет роботу-уборщику повторно выполнять операцию уборки.
При этом блок 1 определения препятствия, установленный в бампер робота-уборщика, определяет только наличие или отсутствие какого-либо объекта (препятствия). Микропереключатели или инфракрасный датчик используются в качестве блока 1 определения препятствия и устанавливаются в бампер. Например, когда оборудованный микропереключателями бампер сталкивается с объектом, микропереключатели включаются и выдают сигнал определения объекта. Когда оборудованный инфракрасным датчиком бампер сталкивается с каким-нибудь объектом, инфракрасный датчик принимает оптический сигнал и выводит сигнал определения объекта.
Известный робот-уборщик имеет следующие недостатки. Блок 1 определения препятствия, установленный на бампере, определяет только, существует ли некоторый объект (препятствие) или нет, но не может точно определить положение объекта и таким образом время, необходимое для уклонения от столкновения, увеличивается и усложненная конструкция бампера, что затрудняет массовое производство. Время, необходимое для уклонения от столкновения, представляет собой время, необходимое для управления направлением перемещения робота-уборщика, чтобы уклониться от объекта, когда робот сталкивается с этим объектом.
Краткое изложение сущности изобретения
Технической задачей настоящего изобретения является создание устройства и способа для определения положения объекта (препятствия) для мобильного робота, которое позволяет точно определять положение объекта, когда мобильный робот, такой как робот-уборщик, сталкивается с объектом.
Другой задачей настоящего изобретения является создание устройства и способа для определения положения объекта для мобильного робота, который позволяет уменьшить время, требуемое для выполнения операции уклонения от столкновения.
Поставленная задача решена путем создания устройства для определения положения объекта для мобильного робота, содержащего первый оптический датчик для определения для первой области бампера мобильного робота, и измерения первой величины перемещения бампера, когда бампер мобильного робота сталкивается с объектом, второй оптический датчик для определения для второй области бампера и измерения второй величины перемещения бампера, когда бампер сталкивается с объектом, микрокомпьютер для формирования управляющего сигнала для управления направлением движения мобильного робота на основе измеренных первой и второй величин перемещения, и блок управления для перемещения мобильного робота согласно управляющему сигналу, генерируемому микрокомпьютером.
Поставленная задача решена также путем создания устройства для определения положения объекта для мобильного робота, содержащего первый оптический датчик, направленный к правой нижней поверхности бампера робота, установленный в правой области опоры, поддерживающей бампер, и выдающий первую величину, показывающую расстояние, которое бампер проходит вследствие столкновения, происходящего, когда бампер сталкивается с объектом (препятствием), второй оптический датчик, направленный к левой нижней поверхности бампера, установленный в левой области опоры и выдающий вторую величину, показывающую расстояние, которое бампер проходит вследствие столкновения, происходящего, когда бампер сталкивается с объектом, микрокомпьютер для определения положения объекта, на основе первой и второй величин перемещения, и формирования управляющего сигнала для управления направлением движения робота, на основе положения объекта, и блок управления для перемещения робота согласно управляющему сигналу, генерируемому микрокомпьютером.
Поставленная задача решена также путем создания способа определения положения объекта для мобильного робота, включающего определение величин, показывающих соответствующие расстояния, которые каждая сторона бампера мобильного робота проходит вследствие столкновения, происходящего, когда бампер сталкивается с объектом, оценку положения объекта, на основе величин перемещения бампера, и управление направлением движения мобильного робота, на основе оценки положения объекта.
Поставленная задача решена также путем создания способа определения положения объекта для мобильного робота, включающего измерение первой величины перемещения бампера робота вследствие столкновения, происходящего, когда бампер сталкивается с каким-либо объектом, с помощью оптического датчика, установленного с левой стороны бампера, измерение второй величины перемещения бампера вследствие столкновения, происходящего, когда бампер сталкивается с объектом, с помощью оптического датчика, установленного с правой стороны бампера, оценку положения объекта на основе первой и второй величин перемещения и управление направлением движения робота-уборщика на основе оценки положения объекта.
Признаки, аспекты и преимущества настоящего изобретения станут более очевидными из нижеследующего подробного описания предпочтительных вариантов воплощения со ссылками на прилагаемые чертежи, на которых:
Фиг.1 изображает блок-схему известного устройства управления роботом;
Фиг.2 изображает блок-схему последовательности операций известного способа управления роботом;
Фиг.3 изображает блок-схему конструкции устройства для определения положения объекта для мобильного робота (например, робота-уборщика) согласно изобретению;
Фиг.4A и 4B изображают вид в плане сверху и боковую вертикальную проекцию соответственно, показывающие положение оптических датчиков устройства для определения положения объекта для робота-уборщика согласно изобретению;
Фиг.5 изображает блок-схему последовательности операций способа определения положения объекта для робота-уборщика согласно изобретению.
Подробное описание предпочтительного варианта воплощения изобретения
Устройство и способ для определения положения объекта (препятствия) для мобильного робота, которое способно определять положение объекта и уменьшать время для выполнения уклонения от столкновения посредством точного измерения величины с помощью оптического датчика, показывающего расстояние, которое бампер мобильного робота проходит вследствие столкновения описаны со ссылкой на фиг.3-5.
На фиг.3 представлена блок-схема устройства для определения положения объекта для мобильного робота (например, робота-уборщика).
Устройство для определения положения объекта для робота-уборщика содержит первый оптический датчик 10, установленный с правой стороны опоры 60 бампера (фиг.4A и 4B), поддерживающей бампер 50 робота, и формирующий первую величину перемещения бампера, когда бампер сталкивается с объектом (препятствием), второй оптический датчик 20, установленный с левой стороны опоры 60 бампера 50 и формирующий вторую величину перемещения бампера, когда бампер 50 сталкивается с объектом. Устройство содержит также микрокомпьютер 30, оценивающий положение объекта на основе первой и второй величин перемещения бампера, и формирующий управляющий сигнал для управления направлением движения робота на основе оценки положения объекта. Устройство содержит также блок 40 управления, управляющий левым приводом (ML) для вращения левого колеса робота-уборщика и/или правым приводом (MR) для вращения правого колеса.
Когда бампер 50 сталкивается с объектом, величина левого перемещения и величина правого перемещения бампера 50 различны. Если объект сталкивается с левой стороной бампера 50, величина силы удара при столкновении больше, чем величина силы удара с правой стороны бампера 50, следовательно, величина левого перемещения бампера 50 больше, чем величина правого перемещения. В настоящем изобретении используются оптические датчики 10 и 20 типа «HDNS-2000» фирмы Agilent Technologies, Inc. и имеющие ту же функцию, что и оптический датчик, устанавливаемый в оптическую мышь в стандартной технологии.
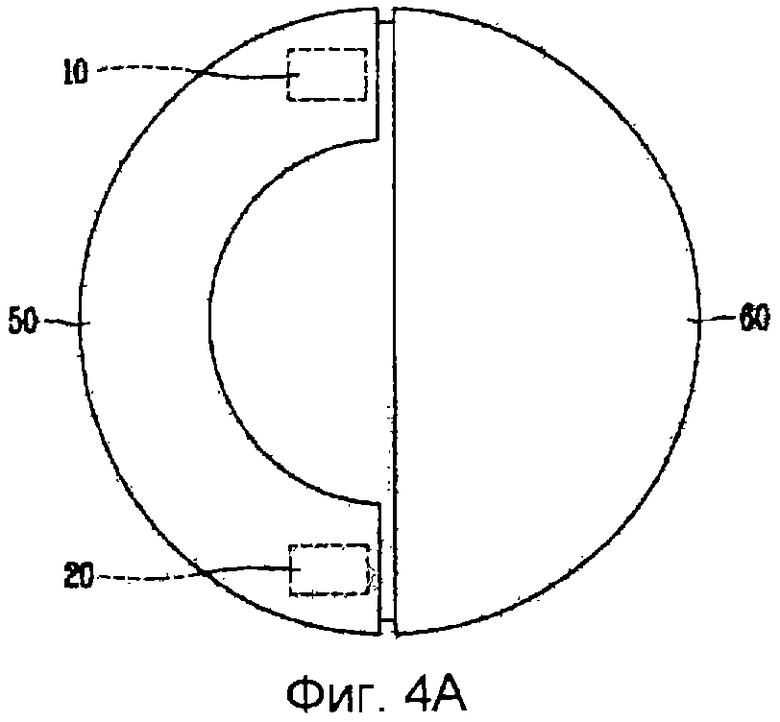
На фиг.4A и 4B представлены проекции, показывающие положения оптических датчиков при их установке в устройстве для определения положения объекта для мобильного робота в соответствии с настоящим изобретением.
Первый оптический датчик 10 (фиг.4A и 4B) направлен к направленной вправо нижней поверхности робота и установлен с правой стороны опоры 60 бампера, поддерживающей бампер 50. Второй оптический датчик 20 направлен к направленной влево нижней поверхности бампера 50 робота и установлен с левой стороны опоры 60 бампера. Т.е. первый и второй оптические датчики 10, 20 установлены с левой и правой сторон опоры 60 бампера робота, чтобы каждый измерял расстояние, которое бампер 50 проходит вследствие столкновения с объектом. Первый и второй оптические датчики 10 и 20 могут устанавливаться на нижней поверхности бампера 50 и быть обращенными к верхней поверхности опоры 60 бампера.
Бампер 50 имеет полукруглую форму и аналогично стандартной технологии может передвигаться вперед и назад посредством движка (не показан). Когда бампер 50 сталкивается с объектом, он может вернуться в исходную позицию под действием пружины (не показана).
Первый и второй оптические датчики 10 и 20, установленные с левой и правой сторон опоры 60 бампера, содержит светоизлучающее устройство (т.е. светоизлучающий диод, LED) для излучения света по направлению к нижней поверхности бампера 50 и детектор света (т.е. фотодетектор) для принятия и детектирования света, отражаемого от нижней поверхности бампера 50.
Оптические датчики 10 и 20 определяют величину перемещения бампера 50 на основе разности между ранее принятым световым отображением и текущим принятым световым отображением и формируют выходной сигнал величин перемещения бампера 50. Т.е. светоизлучающие диоды LED первого и второго оптических датчиков 10 и 20 излучают свет по направлению к нижней поверхности бампера 50, и фотодетекторы первого и второго оптических датчиков 10 и 20 принимают свет, отраженный от нижней поверхности бампера 50. Например, первый и второй оптические датчики 10 и 20 определяют величину перемещения бампера на основе разности между ранее принятым значением света и текущим значением принятого света, аналогично как в оптическом датчике, установленном в оптической мыши. Но в настоящем изобретении первый и второй оптические датчики 10 и 20 измеряют величину перемещения бампера 50, а не величину перемещения оптической мыши, как в известном устройстве. Таким образом, поскольку способ для измерения величины перемещения является таким же, как для оптического датчика оптической мыши, подробное описание будет опущено.
Непрерывно первый и второй оптические датчики 10 и 20 передают сигналы, представляющие собой первую и вторую величины перемещения бампера 50, на входы микрокомпьютера 30.
Управляющая программа, выполняемая микрокомпьютером 30, определяет из этих сигнальных входных данных датчиков положение объекта на основе первой и второй величин перемещения. Например, если первая величина перемещения, полученная от первого оптического датчика 10, установленного с правой стороны опоры 60 бампера, больше, чем вторая величина перемещения, полученная от второго оптического датчика 20, установленного с левой стороны опоры 60 бампера, определяется, что объект (препятствие) находится справа, вследствие этого робот изменяет направление движения на обратное и затем движется в левом направлении (то есть, выполняется операция уклонения от столкновения). Если, однако, первая величина перемещения, полученная из первого оптического датчика 10, установленного с правой стороны опоры 60 бампера, меньше, чем вторая величина перемещения, полученная из второго оптического датчика 20, установленного с левой стороны опоры 60 бампера, определяется, что объект (препятствие) находится с левой стороны, таким образом робот изменяет направление движения на обратное и затем двигается направо (то есть, выполняется операция уклонения от столкновения). Т.е. посредством обнаружения, существует ли объект, с которым столкнулся бампер 60, с левой стороны или с правой стороны бампера, может быть уменьшено время, требуемое для выполнения операции уклонения от столкновения.
Работа устройства для определения положения объекта для робота-уборщика в соответствии с настоящим изобретением осуществляется следующим образом.
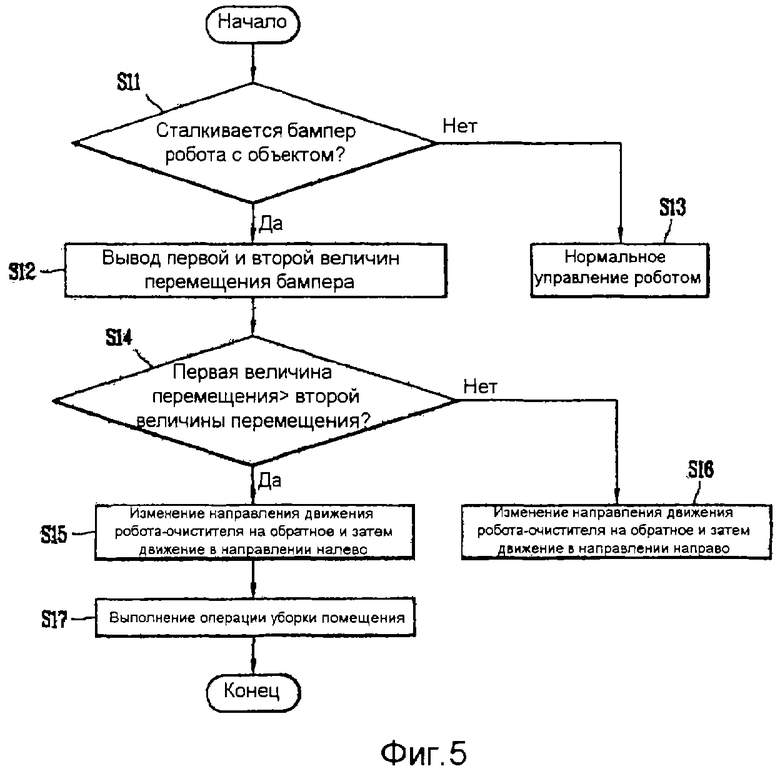
На фиг.5 представлена блок-схема последовательности операций способа для определения положения объекта для робота-уборщика в соответствии с настоящим изобретением.
Пока робот-уборщик выполняет операцию уборки помещения (этап S11), первый и второй оптические датчики 10 и 20 соответственно определяют первую и вторую величины перемещения при столкновении бампера 50 робота с каким-либо объектом (препятствием). Т.е. первый и второй оптические датчики 10 и 20 излучают свет по направлению к нижней поверхности бампера 50 в реальном времени, принимают свет, отраженный от нижней поверхности бампера 50, измеряют величину перемещения бампера 50 по разности между ранее принятым светом и текущим значением принятого света и передают сигналы, представляющие собой величину измеренного перемещения (именно первую и вторую величины перемещения бампера) микрокомпьютеру 30 (этап S12).
Затем в микрокомпьютере 30 осуществляется сравнение первой и второй величин перемещения, полученных из первого и второго оптических датчиков 10 и 20 (этап S14). Если первая величина перемещения больше, чем вторая величина перемещения, программа управления микрокомпьютера определяет, что имеется объект (препятствие) с правой стороны бампера 50. Но если первая величина перемещения меньше, чем вторая величина перемещения, программа управления микрокомпьютера 30 определяет, что имеется объект с левой стороны бампера 50. При этом, если первая и вторая величины перемещения одинаковы или близки друг к другу, программа управления микрокомпьютера 30 определяет, что имеется объект в центральном положении бампера 50.
Пока робот выполняет операцию уборки, если бампер 50 не сталкивается с каким-либо объектом (препятствием), алгоритм управления микрокомпьютера 30 нормально управляет роботом-уборщиком (этап S13).
Когда объект расположен с правой стороны бампера 50, микрокомпьютер 30 формирует управляющий сигнал (т.е. управляющий сигнал для уклонения от столкновения) на блок 40 управления для изменения направления движения робота-уборщика на обратное на предварительно заданное расстояние (например, на 5-10 см), а затем на передвижение робота в направлении налево (этап S15).
Когда объект расположен с левой стороны бампера 50, микрокомпьютер 30 формирует управляющий сигнал (т.е. управляющий сигнал для уклонения от столкновения) на блок 40 управления для изменения направления движения робота на обратное на предварительно заданное расстояние (например, на 5-10 см), а затем на передвижение робота в направлении направо (этап S16).
Когда объект расположен по центру бампера 50, микрокомпьютер 30 формирует управляющий сигнал (т.е. управляющий сигнал для уклонения от столкновения) на блок 40 управления для изменения направления движения робота на обратное на предварительно заданное расстояние (например, на 5-10 см), а затем передвижения робота-уборщика в направлении направо или налево.
Блок 40 управления управляет левым приводом ML и правым приводом MR робота-уборщика в соответствии с управляющим сигналом. Т.е. блок 40 управления выполняет операцию уклонения от столкновения согласно управляющему сигналу.
Затем блок 40 управления управляет роботом таким же образом, как и в известном способе согласно команде микрокомпьютера 30, чтобы нормально выполнять операцию уборки помещения (этап S17).
Специалистам в данной области техники понятно, что расположение дополнительных оптических датчиков на бампере 50 приведет к более точному определению положения объекта (препятствия), когда бампер сталкивается с объектом.
Устройство и способ для определения положения объекта для робота-уборщика в соответствии с настоящим изобретением имеют следующие преимущества.
Например, когда бампер робота-уборщика сталкивается с объектом, величина перемещения бампера точно измеряется посредством оптического датчика, таким образом можно точно определить относительное положение объекта.
Так как относительное положение объекта точно определено, время для совершения операции уклонения от столкновения может быть уменьшено.
Вышеописанные варианты осуществления изобретения не ограничиваются конкретными вариантами, а должны толковаться широко, как определено в прилагаемой формуле изобретения.

Изобретение относится устройству и способу для определения положения объекта для мобильного робота, в частности робота-пылесоса. Устройство содержит первый оптический датчик (10) для определения первой области бампера (50) мобильного робота и измерения первой величины перемещения бампера, когда бампер (50) мобильного робота сталкивается с объектом, второй оптический датчик (20) для определения второй области бампера и измерения второй величины перемещения бампера (50), когда бампер сталкивается с объектом. Устройство содержит микрокомпьютер (30) для формирования управляющего сигнала для управления направлением движения мобильного робота на основе измеренных первой и второй величин перемещения и блок управления (40) для перемещения мобильного робота согласно управляющему сигналу микрокомпьютера. Технический результат заключается в уменьшении времени для совершения операции уклонения мобильного робота от столкновения путем относительно точного определения относительного положения объекта. 4 н. и 8 з.п. ф-лы, 6 ил.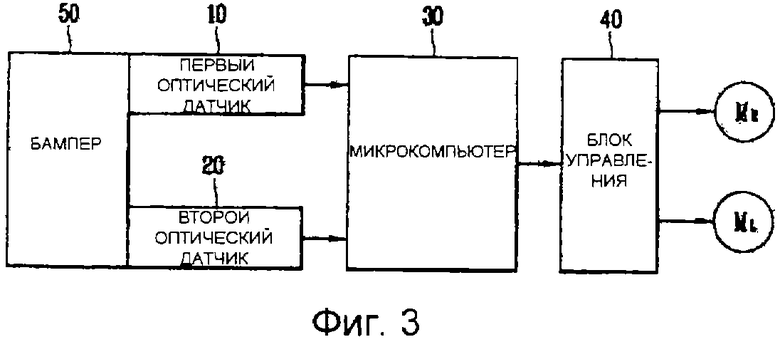
| Предохранительное устройство транс-пОРТНОгО СРЕдСТВА | 1979 |
|
SU852675A1 |
| Оптический датчик для измерения линейных смещений объекта | 1986 |
|
SU1416862A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 3664701 А, 23.05.1972. | |||

