Настоящее изобретение относится в целом к устройствам контроля/управления подъемными устройствами, в частности к устройствам безопасности, таким как ограничители нагрузки, момента, движения (подъема, вращения, распределения, поступательного движения) или скорости, наличие которых предусмотрено в подъемных устройствах, таких как башенные краны.
В частности, изобретение касается защиты схемы обработки сигналов датчиков таких устройств безопасности, выполненных чаще всего в виде датчиков аналогового резистивного типа с питанием постоянным током.
Среди контрольных систем устройств безопасности подъемных устройств встречаются, как правило, системы с аналоговыми, так называемыми "пассивными" датчиками, т.е. датчиками, которые для своей работы должны иметь питание, например потенциометры, измерители или зонды, причем такие датчики выбираются с учетом их низкой стоимости, опробованной технологии и технического ухода.
Применение контрольных систем такого вида в подъемных устройствах делает необходимой защиту приемной схемы, которая обрабатывает и передает аналоговый сигнал такого пассивного датчика.
Для защиты такой приемной схемы в подъемных устройствах в настоящее время применяется в качестве единственного известного решения резервирование схем со сравнением принятых значений. В частности, такая система применяется в башенных кранах, выпускаемых фирмой-заявителем "ПОТЭН" (POTAIN).
Основными недостатками такого существующего решения являются стоимость, сложность монтажа и низкий коэффициент надежности, обусловленный удвоенным риском выхода из строя.
Целью изобретения является устранение отмеченных недостатков за счет создания такого решения, которое при идентичной защите значительно проще и экономичнее и снижает риск отказа системы.
Одним из объектов изобретения является способ защиты схемы обработки сигналов безопасности, в частности сигнала датчика аналогового резистивного типа с питанием постоянным током в устройстве безопасности подъемного устройства, в котором аналоговый сигнал датчика преобразуют в цифровой сигнал аналого-цифровым преобразователем с заданным разрешением, при этом способ отличается тем, что:
- в первый момент времени принимают и запоминают цифровой сигнал, соответствующий аналоговому сигналу датчика,
- затем инвертируют значения питающего напряжения датчика,
- после такой инверсии, в последующий момент времени, принимают новый цифровой сигнал, соответствующий аналоговому сигналу датчика,
- производят суммирование обоих принятых цифровых сигналов,
- сравнивают сумму этих обоих цифровых сигналов с разрешением аналого-цифрового преобразователя и
- если эта сумма точно или приблизительно равна разрешению преобразователя, то разрешают подачу управляющего сигнала, соответствующего управляющей команде, на исполнительный механизм подъемного устройства, или
- если упомянутая сумма значительно отлична от разрешения преобразователя, то подачу управляющего сигнала не разрешают.
Следовательно, принцип изобретения основан на возможности проверки действия схемы обработки сигнала аналогового резистивного датчика путем простой инверсии значений напряжения питания указанного датчика. В случае правильного действия оба цифровых сигнала, принятых соответственно до и после такой инверсии, являются "дополняющими", т.е. их сумма сохраняется неизменной и равной разрешению аналого-цифрового преобразователя. Напротив, в случае отказа сумма этих обоих цифровых значений более не равна такому разрешению, что и позволяет легко обнаружить этот отказ.
В соответствии с предпочтительным вариантом осуществления способа согласно изобретению аналоговый сигнал датчика фильтруется и согласуется для формирования аналогового сигнала, способного преобразовываться в цифровой сигнал до и после инверсии значений напряжения питания датчика.
Предпочтительно, чтобы в том случае, когда результат сложения двух цифровых сигналов значительно отличается от разрешения аналого-цифрового преобразователя, подавался сигнал индикации состояния отказа.
Еще одним объектом изобретения является устройство для осуществления описанного выше способа.
Это устройство можно обозначить преимущественно как устройство защиты схемы обработки сигналов безопасности, в частности сигнала датчика резистивного аналогового типа с питанием постоянным током, в устройстве безопасности подъемного устройства, причем датчик связан с аналого-цифровым преобразователем с заданным разрешением, который преобразует аналоговый сигнал датчика в цифровой сигнал, переданный в устройство арифметической и логической обработки, в которое поступает также управляющая команда и которое способно формировать разрешающий управляющий сигнал для исполнительного механизма, обеспечивающего перемещение подъемного устройства, причем устройство отличается тем, что оно содержит:
- управляющие средства для инверсии значений напряжения питания датчика,
- средства приема цифровых сигналов, которые соответствуют аналоговым сигналам датчика соответственно до и после инверсии значений его напряжения питания,
- средства суммирования принятых обоих цифровых сигналов и сравнения суммы этих сигналов с разрешением аналого-цифрового преобразователя,
- средства разрешения/запрещения подачи управляющего сигнала, соответствующего управляющей команде, на исполнительный механизм в зависимости от результата сравнения упомянутой суммы с разрешением преобразователя.
Если датчиком является, в частности, потенциометр, то в этом случае средства управления инверсией обеспечивают инверсию значений питающего напряжения на клеммах потенциометра.
Предпочтительно расположить схему аналоговой обработки, предназначенную для фильтрации и согласования аналогового сигнала датчика, такого как потенциометр, между указанным датчиком и аналого-цифровым преобразователем.
В предпочтительном варианте осуществления устройства согласно изобретению средства приема двух цифровых сигналов, суммирования этих сигналов, сравнения суммы этих сигналов с разрешением аналого-цифрового преобразователя и разрешения/запрещения подачи команды в зависимости от результата сравнения встроены в указанное выше устройство арифметической и логической обработки, причем это устройство имеет выход, подсоединенный к средствам управления инверсией значений питающего напряжения датчика, выполненным в виде инверсной схемы.
Предпочтительно выполнить устройство арифметической и логической обработки, содержащее в себе (как указано выше) средства приема двух цифровых сигналов, суммирования этих сигналов и сравнения их суммы с разрешением преобразователя, в виде микропроцессора.
Благодаря способу и устройству согласно изобретению становится возможным использовать только один датчик вместо двух (предназначенных для резервирования схем согласно уровню техники), полностью обеспечивая при этом одинаковую надежность или даже более высокую. Кроме того, изобретение упрощает монтаж проводки в подъемном устройстве, так как требуется подключение только одного датчика вместо двух, что обеспечивает экономию. Также благодаря изобретению снижаются причины и риск отказа в связи с тем, что оно использует только одну схему защиты вместо двух. Наконец, предложенная в настоящем изобретении система имеет практически 100%-ю надежность и является самоконтролируемой: если сама схема защиты вышла из строя, то она не управляет инверсией питающего напряжения датчика, в результате чего более не обеспечивается дополнительное образование обоих цифровых сигналов, вследствие чего система приходит в бездействие.
Более подробно изобретение поясняется в приводимым ниже описании со ссылкой на приложенные схематические чертежи, на которых в качестве примера представлен вариант выполнения устройства для защиты системы обработки сигналов безопасности в подъемных устройствах.
Фиг.1 изображает функциональную схему устройства согласно изобретению;
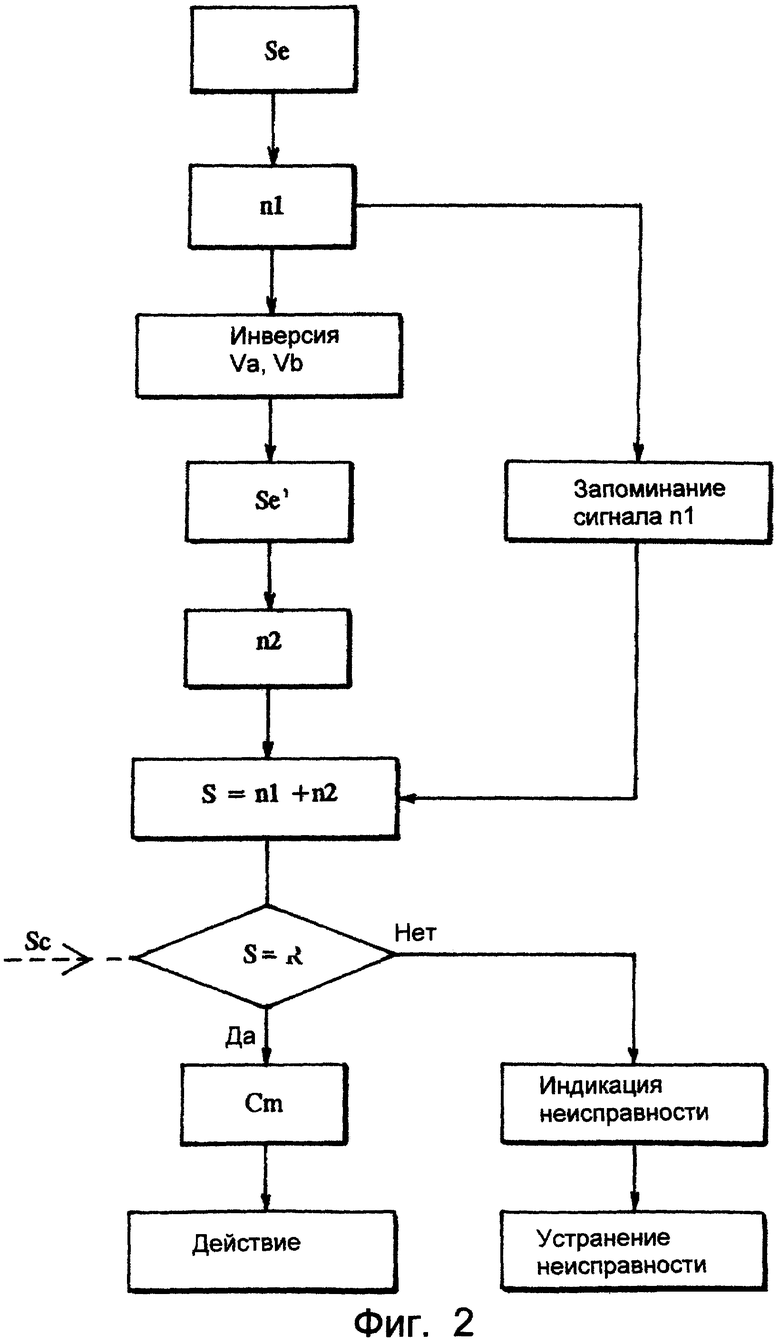
фиг.2 изображает алгоритм, иллюстрирующий действие данного устройства.
На фиг.1 представлена функциональная схема устройства защиты согласно изобретению.
Устройство содержит датчик 2 резистивного аналогового типа, например потенциометр (как показано на фиг.1), установленный соответствующим образом в подъемном устройстве. Датчик 2 питается напряжением (Vb-Va) постоянного тока, при этом Va и Vb означают величины электрического напряжения соответственно на двух наружных клеммах потенциометра. Датчик 2, образованный этим потенциометром, формирует аналоговый сигнал Se в зависимости от положения движка потенциометра.
Устройство содержит также схему 3 аналоговой обработки для отфильтровывания помех и согласования сигнала датчика 2. Схема 3 принимает на своем входе сигнал Se и формирует на своем выходе аналоговый сигнал Ss.
Кроме того, система содержит аналого-цифровой преобразователь 4 с разрешением R, причем это разрешение составляет, например, 12 битов, в результате чего упомянутый преобразователь способен формировать сигналы с цифровыми значениями от 0 до 4095. Данный аналого-цифровой преобразователь 4 принимает на своем входе согласованный аналоговый сигнал Ss и формирует на выходе цифровой сигнал, т.е. целое число n, соответствующее входному сигналу Ss, т. е. сигналу Se датчика 2.
Наконец, система содержит в себе устройство 5 арифметической и логической обработки, выполненное в виде микропроцессора. Устройство 5 принимает цифровой сигнал n преобразователя 4. Оно принимает также управляющую команду Sc, задаваемую оператором подъемного устройства. Это устройство 5 формирует или не формирует управляющий сигнал Cm для разрешения или запрещения подачи команды на исполнительный механизм для перемещения подъемного устройства, при этом исполнительным механизмом 6 служит, как правило, электрический или гидравлический двигатель.
Устройство 5 арифметической и логической обработки содержит, кроме того, дополнительный выход 7 и схему 8 для инверсии значений питающего напряжения Va, Vb датчика 2, причем выход 7 устройства 5 подключен ко входу схемы 8.
Инверсная схема 8 имеет два выхода, на которых присутствуют два напряжения соответственно Va и Vb, при этом эти оба выхода связаны соответственно с двумя клеммами потенциометра, образующего датчик 2.
Устройство 5 арифметической и логической обработки предназначено для формирования на выходе 7 команды Si для инверсии значений напряжения питания датчика 2 согласно алгоритму. Эта команда Si подается на инверсную схему 8, которая управляет таким образом инверсией значений питающего напряжения датчика 2. Например, до инверсии значения напряжения на выходах схемы 8 составляют: Va= -5 В, Vb +5 В, после инверсии эти оба значения напряжения составляют соответственно:Va=+5 B и Vb=-5 B.
Действие описанного выше устройства происходит, в подробном изложении, следующим образом.
В определенный момент времени t1 датчик 2 формирует аналоговый измерительный сигнал Se, преобразуемый сначала схемой 3 в аналоговый сигнал Ss, способный преобразовываться в цифровой, затем в преобразователе 4 он преобразуется в соответствующее цифровое значение n1. Устройство 5 (микропроцессор) запоминает значение n1, соответствующее моменту времени t1, и выдает на выход 7 сигнал Si инверсии. Приняв сигнал Si, инверсная схема 8 подает команду для инверсии питающего напряжения датчика 2.
Таким образом, в последующий момент времени t2 датчик 2 формирует инвертированный аналоговый сигнал Se, который, в свою очередь, будет согласован схемой 3, затем преобразован в соответствующее цифровое значение n2. Устройство 5 (микропроцессор) принимает это новое значение n2.
Устройство 5 (микропроцессор) суммирует оба числа n1 и n2 и сравнивает результат сложения, т.е. число S=n1+n2, с разрешением R аналого-цифрового преобразователя 4.
Если действие системы правильное, то оба значения n1 и n2, соответствующие сигналам Se датчика 2 до и после инверсии его питания, должны быть дополняющими, т.е. их сумма S равна точно или приблизительно разрешению R преобразователя 4. В этом случае устройство 5 (микропроцессор) разрешает подачу управляющего сигнала Cm, соответствующего управляющей команде Sc, на исполнительный механизм 6.
Напротив, если система действует неправильно, то оба значения n1 и n2, соответствующие сигналам Se датчика 2 до и после инверсии его питания, не являются более дополняющими, т.е. их сумма S существенно отличается от разрешения R преобразователя 4. В этом случае устройство 5 (микропроцессор) не разрешает более подачу сигнала Cm, в результате чего команда для исполнительного механизма 6 остается запрещенной. Одновременно учитывается отказ, обнаруженный в результате этого и сообщенный оператору, например, посредством индикации на контрольном дисплее. Следовательно, оператор в состоянии констатировать отказ и при необходимости оценить работу как "дефектную".
Действие устройства иллюстрируются дополнительно алгоритмом, представленным на фиг.2 и приводимой ниже таблицей, в которой приведены значения n1 и n2, соответственно до и после инверсии питания датчика, и их сумма S при предельных значениях, среднем значении и любом значении управляющего положения; эта таблица характеризует систему в нормальном состоянии, в котором сумма S=n1+n2 равна разрешению R.
Из данной таблицы видно, что устройство обладает практически 100 %-ой надежностью, так как единственные значения, не позволяющие определить отказ посредством способа согласно изобретению, располагаются в середине диапазона датчика, в котором значение сигнала Se этого датчика (до и после инверсии) равно нулю. Однако это особое положение соответствует зоне применения, не являющейся предпочтительной и служащей в то же время зоной нерискованного применения.
Кроме того, система является самоконтролируемой, так как в случае выхода из строя самого защитного устройства она не управляет инверсией питающего напряжения датчика 2, в результате чего более не обеспечивается дополнение сигналами Se этого датчика, т.е. значениями n1 и n2. Следовательно, система также автоматически выходит из строя.
Способ и устройство согласно изобретению пригодны для любых видов защиты, при которых используются пассивные аналоговые датчики, которыми оборудуются подъемные устройства, в частности башенные краны. Здесь может идти речь об устройствах безопасности, используемых в подъемном кране во время работы: ограничителях нагрузки, момента, движения (подъема, вращения, распределения, поступательного движения). Речь может идти также о более специальных функциях, таких как контроль кинематики при монтаже крана (например, одновременное разгибание стрелы и мачты), контроль устойчивости (например, кренометр с домкратами), контроль за металлическими органами (например, контроль напряжения в распределительном кабеле) или о других контрольных функциях.
Само собой разумеется, и это следует из изложенного выше, что изобретение не ограничивается единственным вариантом выполнения устройства защиты схемы обработки сигналов безопасности, описанного выше в качестве примера. Напротив, оно охватывает все варианты осуществления и применения одного и того же способа. Таким образом, за рамки изобретения не выходит, в частности, применение любых средств, обеспечивающих вычислительные и логические операции, которыми являются сложение значений n1 и n2 и сравнение их суммы. Изобретение может быть применено в подъемных устройствах любого типа, при этом его область применения не ограничивается башенными кранами. Наконец, хотя изобретение и описано с учетом обработки сигнала единственного датчика, специалисту очевидно, что те же компоненты, а именно преобразователь 4, устройство 5 арифметической и логической обработки и инверсная схема 8, могут быть общими для нескольких датчиков (оснащающих одно и то же подъемное устройство) и обрабатывать в этом случае сигналы, формируемые всеми датчиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2012 |
|
RU2496228C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| Автоматизированная система управления блочно-модульного построения нагружателем гидравлическим в стендах прочностных испытаний | 2016 |
|
RU2643198C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ НЕЗАКОННОГО ИСПОЛЬЗОВАНИЯ МНОГОФАЗНОГО СЧЕТЧИКА | 1999 |
|
RU2194283C2 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ И МОБИЛЬНЫЙ ТЕРМИНАЛ | 2009 |
|
RU2445717C1 |
| СПОСОБ ИНТЕГРИРУЮЩЕГО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 2014 |
|
RU2571549C1 |
| УСТРОЙСТВО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 1991 |
|
RU2013863C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ НАПРЯЖЕНИЯ | 2009 |
|
RU2392727C1 |
| Преобразователь отношения двух напряжений в код | 1989 |
|
SU1695501A1 |
| РЕВЕРСИВНЫЙ ЧИСЛО-ИМПУЛЬСНЫЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2429563C1 |
Группа изобретений относится к технике контроля и управления подъемными устройствами и касается защиты схемы обработки сигнала (Se) датчика резистивного аналогового типа в устройстве безопасности башенных кранов. Сигнал (Se) преобразуется в цифровой сигнал (n) аналого-цифровым преобразователем с разрешающей способностью (R). Цифровой сигнал (n1) принимается и запоминается. Затем значения напряжения питания (Va, Vb) датчика инвертируются, и принимается новый цифровой сигнал (n2). Оба сигнала (n1, n2) суммируются, и их сумма (S) сравнивается с разрешением (R) преобразователя. В зависимости от того, равна или нет сумма (S) разрешению (R), разрешается или не разрешается подача управляющего сигнала (Cm), соответствующего управляющей команде (Sc), на исполнительный механизм. Группа изобретений позволяет упростить защиту схемы, а также повысить ее экономичность и надежность. 2 н. и 7 з.п. ф-лы, 2 ил., 1 табл.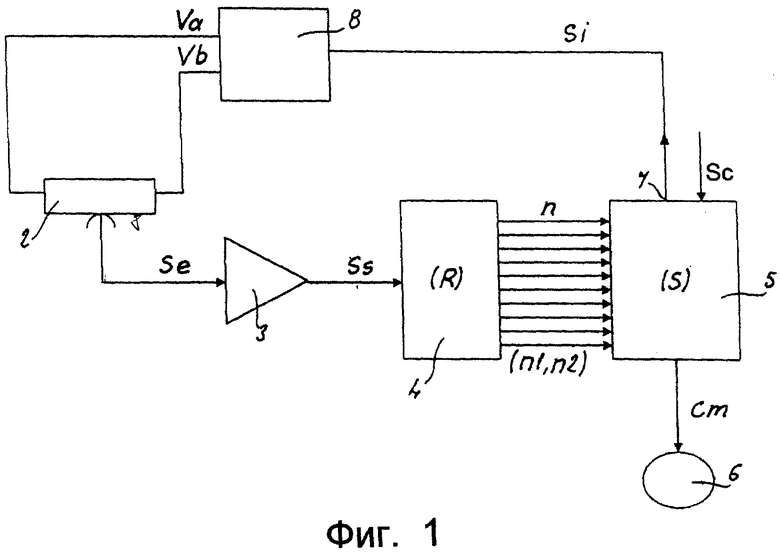
принимают и запоминают в первый момент времени (t1) цифровой сигнал (n1), соответствующий аналоговому сигналу (Se) датчика (2),
затем инвертируют значения питающего напряжения (Va и Vb) датчика (2),
принимают после инверсии в последующий момент времени (t2) новый цифровой сигнал (n2), соответствующий аналоговому сигналу (Se') датчика (2),
производят суммирование принятых обоих цифровых сигналов (n1, n2),
сравнивают сумму (S) этих обоих цифровых сигналов с разрешением (R) аналого-цифрового преобразователя (4) и,
если эта сумма (S) точно или приблизительно равна разрешению (R) преобразователя (4), то разрешают подачу управляющего сигнала (Cm), соответствующего управляющей команде (Sc), на исполнительный механизм (6) подъемного устройства или,
если сумма (S) значительно отличается от разрешения (R) преобразователя (4), то не разрешают подачу управляющего сигнала (Cm).
средства (7, 8) управления инверсией значений напряжения (Va, Vb) питания датчика (2),
средства (5) приема цифровых сигналов (n1, n2), соответствующих двум аналоговым сигналам (Se, Se') датчика (2), соответственно до и после инверсии значений напряжения питания,
средства (5) суммирования двух принятых цифровых сигналов (n1, n2) и сравнения суммы (S) этих обоих сигналов с разрешением (R) аналого-цифрового преобразователя (4),
средства разрешения/запрещения подачи управляющего сигнала (Cm) на исполнительный механизм (6), соответствующего управляющей команде (Sc), в зависимости от результата сравнения суммы (S) с разрешеием (R) преобразователя (4).
| US 6133743 A, 17.10.2000 | |||
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗОВ ВЕРТОЛЕТОМ | 2005 |
|
RU2300484C1 |
| Универсальное устройство для контроля напряжения | 1983 |
|
SU1170359A1 |
| Цифровой измерительный прибор | 1982 |
|
SU1140056A1 |

