Изобретение относится к области экспериментальной техники и может быть использовано преимущественно в стендах прочностных испытаний натурных конструкций, в том числе авиационных.
Развитие электронно-вычислительной техники, элементной базы гидроприводов, цифровой электроники позволяют реализовывать децентрализованные системы управления и безопасности нагружателей гидравлических (НГ), выполненные с возможностью реконфигурации.
Известны технические решения, обеспечивающие возможность встраивания нагружателей - гидроцилиндров с цифровым управлением в системы испытания авиационных конструкций (патенты РФ №№2372597; 2305264; 2549916).
Такие АСУ НГ не надежны и не обладают достаточной степенью гибкости.
Из уровня техники известна цифровая система управления испытательной установкой, содержащая цифровое вычислительное устройство, цифроаналоговые преобразователи (ЦАП), аналого-цифровые преобразователи (АЦП), датчики обратной связи, установленные на вибраторах, механически связанных с объектом испытаний (см. Гетманов А.Г. и др. Автоматическое управление вибрационными испытаниями. М. Энергия, 1978, с. 78).
Недостатки известной системы обусловлены сложностью взаимосвязей между элементами схемы и большим количеством каналов управления, что снижает гибкость системы.
Известна многоканальная система нагружения, содержащая первую группу электрогидравлических следящих приводов, входы каждого из которых через соответствующие цифроаналоговые преобразователи и устройство ввода-вывода соединены с выходом блока задания и контроля программы, вторую группу гидравлических следящих приводов, блок управления, первые вход и выход которого подключены соответственно к второму выходу устройства ввода-вывода и управляющему входу источника гидропитания, связанного через каналы нагнетания и слива с электрогидравлическими следящими приводам, и последовательно соединенные мультиплексор и аналого-цифровой преобразователь, выход которого через устройство ввода-вывода подключен к входу блока задания и контроля программы, при этом в систему введены коммутаторы и блоки сравнения по числу электрогидравлических следящих приводов в первой группе, первые и вторые входы которых соединены соответственно с выходами электрогидравлических следящих приводов первой группы и с выходами электрогидравлических следящих приводов второй группы, входы которых подключены к входам соответствующих электрогидравлических следящих приводов первой группы, выход каждого из блоков сравнения соединен со вторым входом блока управления, выход каждого коммутатора - с соответствующим входом мультиплексора, а третий вход каждого коммутатора подключен ко второму выходу блока управления (А.С. №920638 на изобретение «Система управления нагружением конструкций», дата подачи 20.03.1980 г., опубл. 15.04.1982 г.).
Недостатки известной системы связаны с наличием многочисленных аналоговых связей и линейных узлов, снижающих точность измерений и определение нагрузок, что, в свою очередь, влияет на надежность системы, а также усложняет ее монтаж и обслуживание. Кроме того, система маловариативна, т.к. для всех каналов нагружения в определенной группе задаются одинаковые программы нагружения, что, в свою очередь, не допускает возможности осуществления нагружения каждым каналом нагружения отдельно.
Наиболее близким техническим решением к заявляемому изобретению является многоканальная система нагружения, содержащая источник гидропитания, связанный с блоком управления в виде сервоклапана, управляющую ЭВМ, к которой подключены каналы нагружения с обратной связью по силе. Каждый канал нагружения включает в себя цифровой регулятор, связанный с генератором синусоидального сигнала задания нагрузок, гидроцилиндр, через динамометр со встроенным нормирующим усилителем сопряженный с объектом испытаний, а также сервоклапан, электрический вход которого подключен к цифровому регулятору. Генератор и регулятор через сервоклапан соединены с гидроцилиндром и посредством полевого шинного интерфейса подключены к управляющей ЭВМ. Полевой шинный интерфейс, ЭВМ и источник питания являются общими для нагружателей N1-Nm. Цифровой регулятор, сервоклапан, гидроцилиндр и динамометр образуют замкнутый контур регулирования следящего канала нагружения (патент №2383804 на изобретение «Многоканальная система нагружения», дата подачи 02.08.2005 г., опубл. 27.07.2007 г.).
Недостатки данной системы связаны со сложностью организации каналов передачи данных и использованием полевого шинного интерфейса, которые затрудняют монтаж и обслуживание системы. Воспроизводимая нагрузка изменяется только по синусоидальному сигналу, а обратная связь предусмотрена только по одному параметру - силе. Помимо этого, в качестве управляющего клапана может быть применен только сервоклапан.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является повышение надежности, вариативности и гибкости системы, а также снижение энергозатрат и повышение технологичности при проведении прочностных испытаний за счет блочно-модульного построения автоматизированной системы управления.
Указанный результат достигается тем, что автоматизированная система управления блочно-модульного построения нагружателем гидравлическим в стендах прочностных испытаний (АСУ НГ), служащая для управления по меньшей мере одним исполнительным устройством, снабженным по меньшей мере одним датчиком обратной связи и содержащим блок управления, аналого-цифровые и цифроаналоговые преобразователи, устройства по формированию и обработке дискретных сигналов управления, и включающая автоматизированную систему управления верхнего уровня (АСУ верхнего уровня), через интерфейс соединенную с автоматизированной системой управления нижнего уровня (АСУ нижнего уровня), согласно изобретению построена по блочно-модульному принципу, при этом автоматизированная система нижнего уровня выполнена с возможностью осуществления программной переконфигурации в зависимости от объема решаемых задач, определяемого командами АСУ верхнего уровня, и размещена или непосредственно на нагружателе гидравлическом, или на расстоянии возможного взаимодействия с ним и содержит интерфейсный модуль, двусторонней связью соединенный с блоком управления, разделенным на модуль решающей части, в качестве которой используют микроЭВМ с операционной системой реального времени (ОСРВ), и модуль оперативной части, реализованный, например, на базе быстродействующей программируемой логической интегральной схемы (ПЛИС), при этом связь между АСУ нижнего уровня, АСУ верхнего уровня и элементами схемы, включая клапан управления, датчики обратной связи, выполнена в виде проводного и/или беспроводного высокоскоростного канала передачи данных.
Автоматизированная система нижнего уровня одного нагружателя N1 выполнена с возможностью присоединения к АСУ нижнего уровня других нагружателей, например, Nm.
В качестве исполнительного устройства следует считать совокупность одного клапана управления, связанного с гидроцилиндром двустороннего действия, управляемого этим клапаном. В состав одного нагружателя гидравлического, например, N1, может входить или одно, или несколько таких исполнительных устройств, объединенных в группу. При этом заявляемая АСУ по меньшей мере одним НГ (N1) выполнена с возможностью управления не только собственными исполнительными устройствами 1, 2, 3, но и одним или группой исполнительных устройств, входящих в состав другого(-их) нагружателя(-ей) Nm, дополнительно подключаемых к АСУ первого нагружателя.
Изобретение поясняется чертежами, где
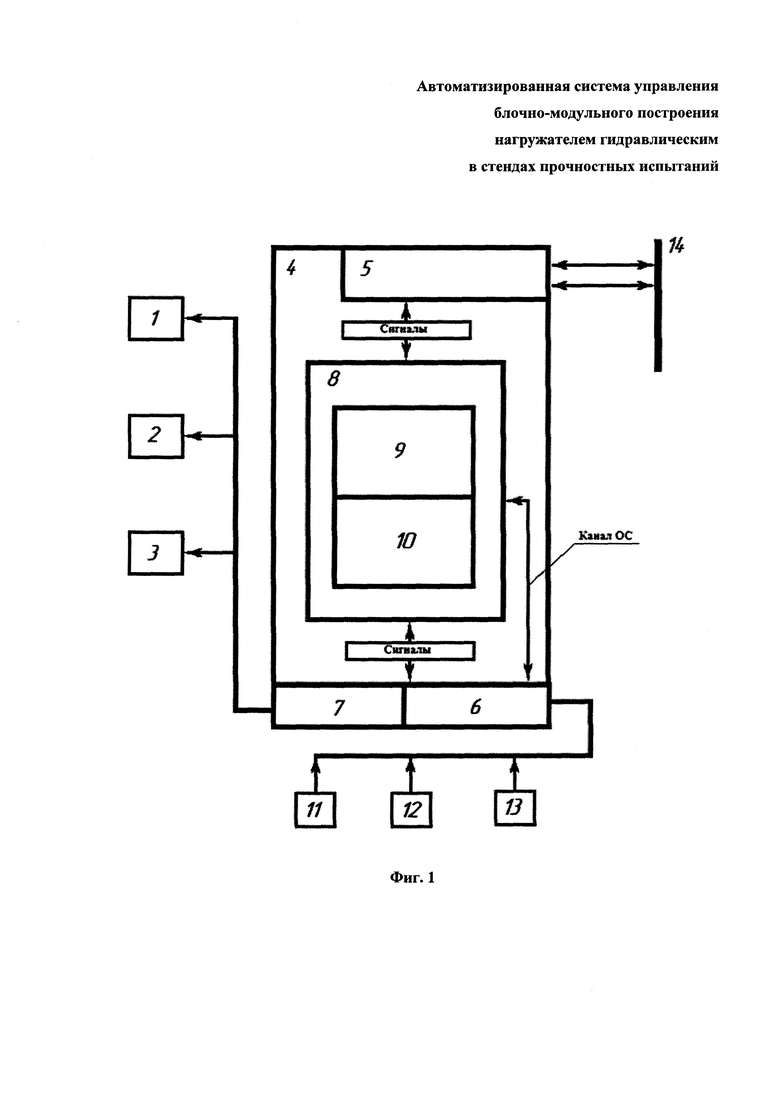
Фиг. 1 - блок-схема АСУ одного нагружателя гидравлического (N1).
Фиг. 2-5 - схемы вариантов конфигураций по распределению управляющих функций АСУ НГ.
Предлагаемое к защите техническое решение представляет собой блочно-модульную автоматизированную систему управления (АСУ), применяемую преимущественно в стендах прочностных испытаний натурных конструкций и предназначенную для управления по меньшей мере одним исполнительным устройством, выбранным из группы исполнительных устройств, например 1, 2, 3, входящих в состав одного нагружателя гидравлического N1, в качестве которого используют гидроцилиндр двустороннего действия, через клапан/клапаны управления, в том числе сервоклапан, пропорциональный клапан, клапан давления или расхода и т.п. (на чертеже не показаны) соединенного с АСУ (фиг. 1).
Автоматизированная система управления нагружателем состоит из взаимосвязанных между собой управляющей АСУ верхнего уровня (на чертеже не показана) и АСУ нижнего уровня 4.
АСУ нижнего уровня 4 построена по блочно-модульному принципу и выполнена с возможностью определения программной переконфигурации, позволяющей осуществлять как синхронное управление сразу всеми исполнительными устройствами 1, 2, 3, так и автономное управление любым из них.
АСУ 4 может быть размещена или непосредственно на нагружателе гидравлическом, например N1, или на расстоянии возможного взаимодействия от него.
При подключении к АСУ нижнего уровня 4 нагружателя N1 по меньшей мере одного исполнительного устройства, например, 1, осуществляемый АСУ объем управления и контроля может быть в зависимости от объема решаемых задач разделен посредством команд от АСУ верхнего уровня между АСУ нижнего уровня и АСУ верхнего уровня.
В случае одновременного подключения к АСУ нижнего уровня 4 нескольких исполнительных устройств - группы устройств, состоящей, например, из исполнительных устройств 1, 2, 3, заявляемая система управления может быть программно разделена как на автономное управление любым из упомянутых устройств 1, 2, 3, так и на управление исполнительных устройств, объединенных в группу в любом их сочетании.
Управление любым исполнительным устройством или группой таких устройств может быть осуществлено непосредственно АСУ верхнего уровня, в качестве которой может служить автоматизированное рабочее место (АРМ) оператора испытательного стенда.
Автоматизированная система управления нижнего уровня 4 включает интерфейсный модуль 5, который через модуль аналого-цифровых 6 и цифроаналоговых преобразователей 7 соединен с модулем блока управления 8 в виде контроллера, разделенного, в свою очередь, на модуль решающей части 9 в виде микроЭВМ с операционной системой реального времени и модуль оперативной части 10, построенной, как один из вариантов, на базе быстродействующей программируемой логической интегральной схемы (ПЛИС). При этом АСУ НГ 4 через интерфейсный модуль 5 высокоскоростной канал передачи данных (ВКПД) 14 подключена к управляющей АСУ верхнего уровня.
К АЦП 6 подключен по меньшей мере один датчик контролируемого параметра, закрепленный, как правило, на нагружателе гидравлическом - гидроцилиндре, при этом, в качестве такого датчика может быть установлен датчик силы, датчик положения, датчик деформации, датчик скорости, датчик ускорения, датчик давления, датчик расхода и т.п. Как правило, одновременно на гидроцилиндре устанавливают несколько разных датчиков контролируемых параметров, например 11, 12, 13.
Работа АСУ нагружателя гидравлического может быть осуществлена при прохождении различных сигналов, в том числе команд, направленных с АСУ верхнего уровня, сигналов обратной связи, поступивших с датчиков, либо сигнала, значение которого вычислено по заданному или определенному алгоритму, в котором в качестве переменных величин использован возвращенный сигнал с соответствующего датчика (датчиков).
К оперативной части 10 АСУ нижнего уровня 4, как правило, подключены, дополнительные устройства, например, индикаторы работы устройства (на чертеже не показаны), с которых передаются служебные сигналы.
Решающая часть 9 контроллера 8 может служить для выполнения следующих задач:
- формирование заданий для исполнительных устройств 1-3 нагружателя гидравлического на основе параметров, поступивших от АСУ верхнего уровня (например, АРМ);
- передача через интерфейсный модуль 5 на управляющую ЭВМ результатов проведенных прочностных испытаний;
- контроль над работой основных и вспомогательных систем нагружателя и передачи полученных результатов в АСУ верхнего уровня;
- буферизация потока данных;
- генерация задающих сигналов с реализацией любого закона управления, например, синусоидального, ступенчатого или псевдослучайного) и их передача в оперативную часть 10;
- передача сигналов от индикаторов работы в АСУ верхнего уровня;
- синхронизация работы исполнительных устройств в случае подключения к АСУ НГ более одного исполнительного устройства
К оперативной части 10 АСУ кроме индикаторов работы может быть подключен гидравлический блок управления и защиты (БУИЗ) (на чертеже не показаны), устанавливаемый, как правило, на гидроцилиндре.
С помощью модуля оперативной части 10 контроллера 8 обеспечивается выполнение таких задач, как:
- считывание сигнала, поступающего с любого из датчиков контролируемого параметра, например, 11-13, обработка (фильтрация) посредством АЦП 6 поступившего сигнала, а также преобразование всех сигналов АСУ 4;
- расчет управляющего воздействия для исполнительных устройств с установленными точностью и синхронизацией, выдача результатов решения на цифроаналоговый преобразователь 7 для управления исполнительным устройством;
- обработка служебных сигналов, например, со средств индикации;
- контроль над работой системы нагружения, включающей по меньшей мере один НГ; аварийное завершение работы, подача в АСУ верхнего уровня сигналов о возникновении аварийных ситуаций или об отказах работы устройств;
- формирование и обработка дискретных цифровых сигналов для управления: запрет/разрешение/контроль над работой исполнительных устройств; подача/отключение питания датчиков и исполнительных устройств; запрет/разрешение работы БУИЗ;
- организация и контроль над работой системы контроля сил (СКС), состоящей из датчиков нагружения, системы сбора и хранения информации и системы аварийной защиты (на чертеже не показаны);
- организация передачи потока данных результатов проведенных испытаний, работы СКС и служебных сигналов от средств индикации в решающую часть контроллера 8. Перечень решаемых задач может как увеличиваться, так и уменьшаться, а при необходимости решение тех или иных задач может быть перенесено из решающей части в оперативную и наоборот, на этапе формирования архитектуры системы, с АСУ верхнего уровня (АРМ оператора).
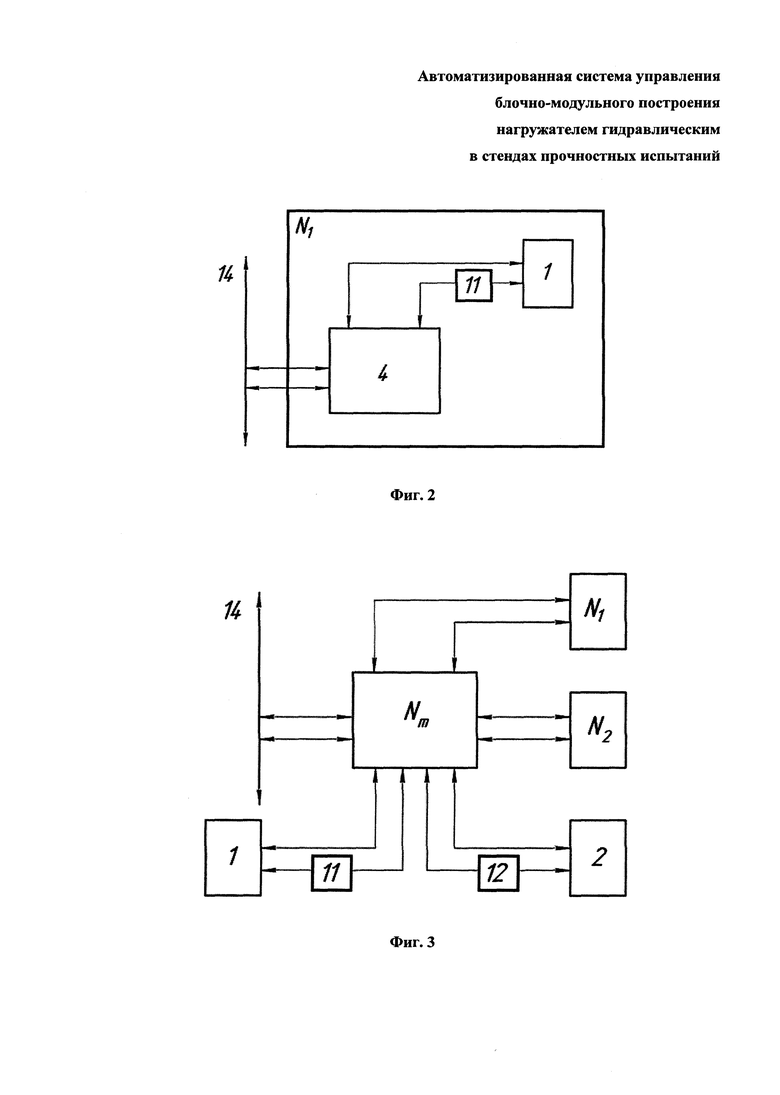
На фиг. 2 представлена схема управления, например, исполнительным устройством 1 нагружателя N1, осуществляемого собственной АСУ нижнего уровня 4, которая обрабатывает показания одного из датчиков, например 11, и формирует управляющие сигналы для клапана исполнительного устройства. При этом макрозадачи по функционированию данного нагружателя N1 собственная АСУ 4 получает от постановщика задачи верхнего уровня, например АСУ верхнего уровня через высокоскоростной канал передачи данных (ВКПД) 14.
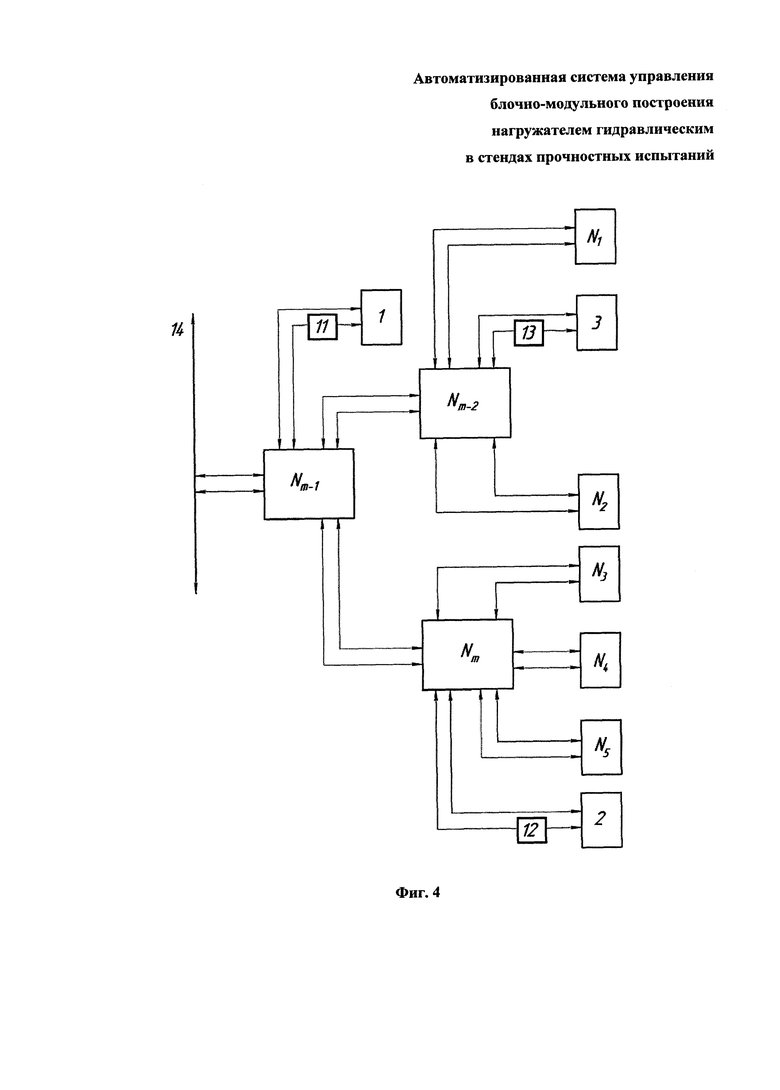
Группа нагружателей N1-N2 (фиг. 3) управляется посредством АСУ 4, являющейся собственной для нагружателя, например, Nm, которая обрабатывает показания датчиков и формирует управляющие сигналы не только для «своих» исполнительных устройств 1, 2 с датчиками 11, 12 соответственно, но и для АСУ другого(-их) нагружателя N1/нагружателей N1-N2, которая(-ые), в свою очередь, обрабатывает(-ют) эти сигналы и транслирует(-ют) на собственные исполнительные устройства (на чертеже не показаны). При этом макрозадачи по работе группы нагружателей N1-N2 групповая АСУ нагружателя Nm через ВКПД 14 получает от постановщика задачи верхнего уровня, например, АСУ верхнего уровня. Собственные АСУ каждого из нагружателей N1-N2 выполняют функции либо контроллеров связи и непосредственно формируют управляющий сигнал для клапанов исполнительных устройств, либо разделяют функции управления с АСУ нагружателя Nm.
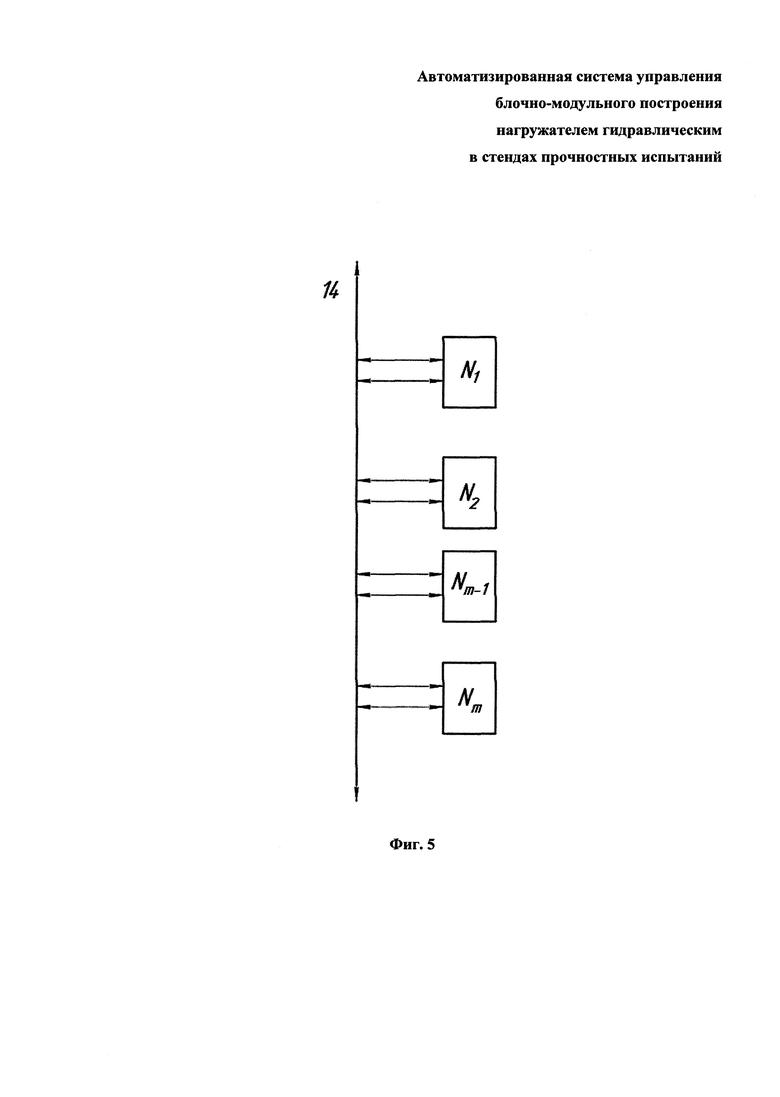
АСУ 4 нагружателей N1-Nm объединены в группы по нескольку единиц (фиг. 4). Управление каждой группы нагружателей выполняется собственной групповой АСУ, которая, в свою очередь, подключена к управляющей АСУ всех групп, в качестве которой может быть использована АСУ нижнего уровня любого из входящих в группу нагружателей, например, нагружателя Nm-1, при этом управляющая АСУ всех групп может обрабатывать сигналы с датчиков всех исполнительных устройств всех нагружателей N1-Nm всех групп, а также формировать управляющие сигналы для клапанов всех исполнительных устройств 1-3. При этом макрозадачи по реализации функций, действий определенной группой нагружателей каждая групповая АСУ получает через ВКПД 14 от постановщика задачи верхнего уровня (управляющей АСУ группы или АСУ верхнего уровня). В зависимости от решаемых задач собственные АСУ 4 каждого из нагружателей N1-Nm-2 в выбранной группе могут находиться в пассивном режиме, выполняя функцию контроллеров связи и формируя непосредственные управляющие сигналы для клапанов исполнительных устройств, либо разделяя функции управления с управляющей АСУ всей группы, в данном случае АСУ нагружателя Nm-1.
На фиг. 5 представлен вариант конфигурации по распределению управляющих функций между АСУ группы нагружателей N1-Nm и АСУ верхнего уровня, при которой АСУ верхнего уровня через ВКПД 14 обрабатывает показания всех датчиков всех нагружателей N1-Nm, после чего напрямую формирует управляющие сигналы для клапанов всех исполнительных устройств, входящих в состав этих нагружателей. В этом случае собственные АСУ каждого из нагружателей находятся в пассивном режиме, выполняя функции контроллеров связи и формируя непосредственные управляющие сигналы для каждого из клапанов.
Согласно данному изобретению возможно любое сочетание описанных выше конфигураций построения автоматизированной системы управления. Распределение функционала и переконфигурация производится при помощи АСУ верхнего уровня.
АСУ НГ позволяет программно переконфигурировать объем решаемых ею задач от простого ретранслятора команд АСУ верхнего уровня и сигналов обратной связи к АСУ верхнего уровня до полного самостоятельного управления посредством АСУ нижнего уровня по меньшей мере одним нагружателем гидравлическим с получением от АСУ верхнего уровня только контрольных параметров, которые необходимо достигнуть.
Осуществление изобретения подтверждается примерами конкретного выполнения.
Формирование задания для исполнительных устройств 1-3 (Фиг. 1) для одного нагружателя N1 гидравлического осуществляется на основе контрольных данных, полученных с АСУ верхнего уровня. Направленное с АСУ верхнего уровня задание по высокоскоростному каналу передачи данных 14 через интерфейсный модуль 5 поступает в решающую часть 9 контроллера 8, где на основе полученных данных генерируется форма задающего сигнала. Затем задающий сигнал транслируется в оперативную часть 10 контроллера 8, где происходит сравнение задания с текущими значениями сигналов, обработанных с помощью АЦП 6 с датчиков 11-13. На основе сравнения задания и текущих значений сигналов, с учетом тактирующего сигнала синхронизации работы других исполнительных устройств, вырабатывается сигнал управления исполнительным устройством через цифроаналоговый преобразователь 7 (ЦАП 7). Одновременно с этим в оперативной части 10 осуществляется обработка служебных сигналов, поступающих, например, с индикаторов работы устройства, формирование и обработка дискретных цифровых сигналов для управления осями.
Результаты отработки задания оператора считываются с датчиков 11-13 через аналого-цифровой преобразователь 6 и затем передаются в оперативную часть 10, далее в решающую часть 9 контроллера 8, затем через интерфейсный модуль 5 по высокоскоростному каналу передачи данных передаются в АРМ оператора для дальнейшего анализа и архивации.
Через решающую 9 и оперативную 10 части контроллера 8 на верхний уровень так же могут передаваться данные о работе защитной системы контроля сил, служебные сигналы, данные о работе основных и вспомогательных систем нагружателя гидравлического, а также сигнализация об аварийных ситуациях и отказах оборудования.
В случае подключения к нагружателю по меньшей мере одного дополнительного нагружателя, например, Nn, задания от АСУ верхнего уровня могут относиться как к одному исполнительному устройству одного нагружателя, любого из N1-Nm, так и ко всем исполнительным устройствам всех нагружателей, причем задающие сигналы могут быть назначены и/или скорректированы для любого исполнительного устройства любого из нагружателей по отдельности или синхронно для всех исполнительных устройств всех нагружателей N1-Nm.
Благодаря применению современной компонентной базы, позволяющей формировать сигналы управления любой формы непосредственно на нагружателе и одновременно осуществлять регулирование процесса, существенно повышается быстродействие системы (фактически - оно ограничено только быстродействием клапанов управления), значительно снижаются объемы передаваемой информации, упрощается организация информационных сетей, например, появляется возможность использования беспроводных каналов, без существенного риска потери данных.
Таким образом, применение автоматизированной системы управления блочно-модульного принципа построения в процессах нагружения позволяет создавать стенды прочностных испытаний произвольных конфигураций, не требующих аппаратной переналадки, с рациональной схемой построения каналов нагружения, применением беспроводных каналов передачи данных, снижением требований к объемам передаваемой информации, дублированием передаваемой информации без увеличения пропускной способности каналов, что способствует повышению помехоустойчивости и надежности систем в целом.
Преимущества заявляемой блочно-модульного построения АСУ нагружателя гидравлического состоят в том, что система обладает быстродействием, надежностью, высокой степенью реконфигурации и может быть исполнена и использована в любом сочетании топологий, что, в свою очередь, существенно упрощает ее эксплуатацию и снижает затраты при проведении испытаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| Блочно-модульный нагружатель гидравлический в стендах прочностных испытаний | 2016 |
|
RU2643197C1 |
| АВТОМАТИЗИРОВАННЫЙ УЧАСТОК ИЗГОТОВЛЕНИЯ ТАБЛЕТОК ЯДЕРНОГО ТОПЛИВА | 2003 |
|
RU2261488C2 |
| Система автоматического управления электрогидравлической системы регулирования | 2021 |
|
RU2759419C1 |
| Система зарядки и способ управления зарядкой батареи электротранспортного средства | 2021 |
|
RU2797370C1 |
| КОМПЛЕКС ЭЛЕКТРООБОРУДОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНЫХ РЕАКТОРОВ | 2014 |
|
RU2574289C2 |
| УПРАВЛЯЮЩАЯ СИСТЕМА БЕЗОПАСНОСТИ АТОМНОЙ ЭЛЕКТРОСТАНЦИИ | 2015 |
|
RU2598599C1 |
| Программно-технический комплекс контроля и управления технологическими процессами в горно-обогатительном производстве | 2018 |
|
RU2698627C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| Программно-технический комплекс контроля, управления и предиктивной диагностики технологического оборудования подъемно-транспортного механизма | 2021 |
|
RU2770052C1 |
| Способ предотвращения аварийных действий при оперативном управлении технологическим объектом | 2020 |
|
RU2758449C1 |
Изобретение относится к области экспериментальной техники и может быть использовано преимущественно в стендах прочностных испытаний натурных конструкций, в том числе авиационных. Система служит для управления по меньшей мере одним исполнительным устройством, снабженным по меньшей мере одним датчиком обратной связи и содержащим блок управления, аналого-цифровые и цифроаналоговые преобразователи, устройства по формированию и обработке дискретных сигналов управления, и включает автоматизированную систему управления верхнего уровня (АСУ верхнего уровня), через интерфейс соединенную с автоматизированной системой управления нижнего уровня (АСУ нижнего уровня). Система построена по блочно-модульному принципу, при этом автоматизированная система нижнего уровня выполнена с возможностью осуществления программной переконфигурации в зависимости от объема решаемых задач, определяемого командами АСУ верхнего уровня. Система размещена или непосредственно на гидравлическом нагружателе, или на расстоянии возможного взаимодействия с ним и содержит интерфейсный модуль, двусторонней связью соединенный с блоком управления, разделенным на модуль решающей части, в качестве которой используют микроЭВМ с операционной системой реального времени (ОСРВ), и модуль оперативной части, реализованный, например, на базе быстродействующей программируемой логической интегральной схемы (ПЛИС). При этом связь между АСУ нижнего уровня, АСУ верхнего уровня и элементами схемы, включая клапан управления, датчики обратной связи, выполнена в виде проводного и/или беспроводного высокоскоростного канала передачи данных. Технический результат заключается в повышении надежности, вариативности и гибкости системы, а также снижении энергозатрат при проведении прочностных испытаний за счет блочно-модульного построения автоматизированной системы управления. 5 ил. 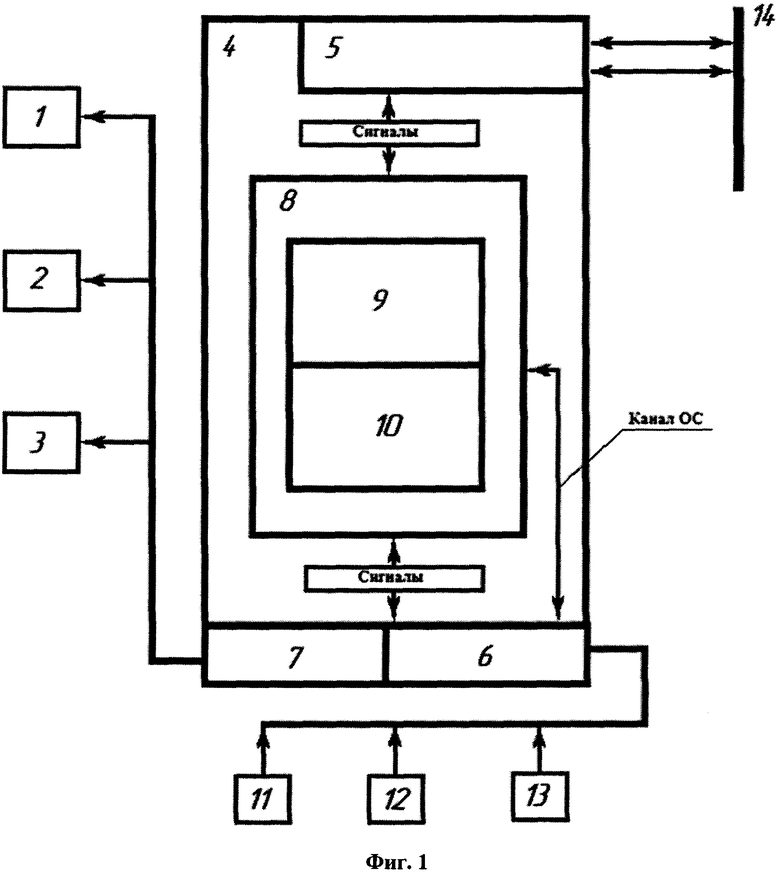
Автоматизированная система управления блочно-модульного построения нагружателем гидравлическим в стендах прочностных испытаний (АСУ НГ), служащая для управления по меньшей мере одним исполнительным устройством, снабженным по меньшей мере одним датчиком обратной связи и содержащим блок управления, аналого-цифровые и цифроаналоговые преобразователи, устройства по формированию и обработке дискретных сигналов управления, и включающая автоматизированную систему управления верхнего уровня (АСУ верхнего уровня), через интерфейс соединенную с автоматизированной системой управления нижнего уровня (АСУ нижнего уровня), отличающаяся тем, что построена по блочно-модульному принципу, при этом автоматизированная система нижнего уровня выполнена с возможностью осуществления программной переконфигурации в зависимости от объема решаемых задач, определяемого командами АСУ верхнего уровня, и размещена или непосредственно на нагружателе гидравлическом, или на расстоянии возможного взаимодействия с ним и содержит интерфейсный модуль, двусторонней связью соединенный с блоком управления, разделенным на модуль решающей части, в качестве которой используют микроЭВМ с операционной системой реального времени (ОСРВ), и модуль оперативной части, реализованный, например, на базе быстродействующей программируемой логической интегральной схемы (ПЛИС), при этом связь между АСУ нижнего уровня, АСУ верхнего уровня и элементами схемы, включая клапан управления, датчики обратной связи, выполнена в виде проводного и/или беспроводного высокоскоростного канала передачи данных.
| ЗАПОРНАЯ АРМАТУРА "АННУШКА" | 2007 |
|
RU2383804C2 |
| Система управления нагружением конструкций | 1980 |
|
SU920638A1 |
| ГИДРОСИСТЕМА ДЛЯ НАГРУЖЕНИЯ АВИАЦИОННЫХ КОНСТРУКЦИЙ ПРИ ПРОЧНОСТНЫХ ИСПЫТАНИЯХ | 2013 |
|
RU2549916C1 |
| Поводковый патрон | 1950 |
|
SU90860A1 |
| СИСТЕМА УПРАВЛЕНИЯ БОЛЬШЕГРУЗНЫМ КРАНОМ | 2001 |
|
RU2196102C1 |

