является расширение функциональных возможностей. Исполнительный механизм со держит основание 1, на котором с возможностью вращения относительно вертикальной оси установлена вилка 2, связанная с приводом 10 вращения. Вилка 2 шарнирно связана с вилкой 3, шарнирно связанной с подвеской 4 для объекта испытаний. На вилке 2 закреплен элемент 9 обезвешивания, связанный трособлочной систе мой 5-8 с вилкой 3. Механизм обеспечивав отслеживание пространственного положения объекта испытаний за счет поворота вилки 3 синхронно с перемещениями объекта в вертикальной плоскости, а также самоориентирование звеньев, механизма при изменении плоскости перемещения объекта с переходом через мертвую точку. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД РАСКРЫТИЯ ПАНЕЛЕЙ СОЛНЕЧНОЙ БАТАРЕИ | 2011 |
|
RU2483991C1 |
| Установка для проведения испытаний крупногабаритных солнечных батарей | 1991 |
|
SU1803351A1 |
| Исполнительный механизм имитатора пониженной гравитации транспортных средств | 1978 |
|
SU981842A1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ПРЕЦИЗИОННЫХ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2733012C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО С ТРОСОБЛОЧНОЙ СИСТЕМОЙ ДЛЯ ОБЕЗВЕШИВАНИЯ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2721448C1 |
| Способ обезвешивания и возбуждения колебаний при модальных испытаниях и устройство для его осуществления | 2017 |
|
RU2677942C2 |
| Автоматизированный комплекс для штамповки | 1982 |
|
SU1058684A1 |
| УСТРОЙСТВО ИМИТАЦИИ НЕВЕСОМОСТИ МЕХАНИЗМОВ С ГИБКОЙ КОНСТРУКЦИЕЙ ЭЛЕМЕНТОВ | 2006 |
|
RU2334970C2 |
| Исполнительный механизм имитатора пониженной гравитации | 1978 |
|
SU765686A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ПНЕВМАТИЧЕСКИХ ШИН И УПРУГИХ ЭЛЕМЕНТОВ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2133459C1 |

Изобретение относится к стендам для наземных испытаний конструкций с имитацией невесомости и может быть использовано при разработке стендов для испытания конструкций, совершающих в процессе функционирования сложные пространственные перемещения. Целью изобретения /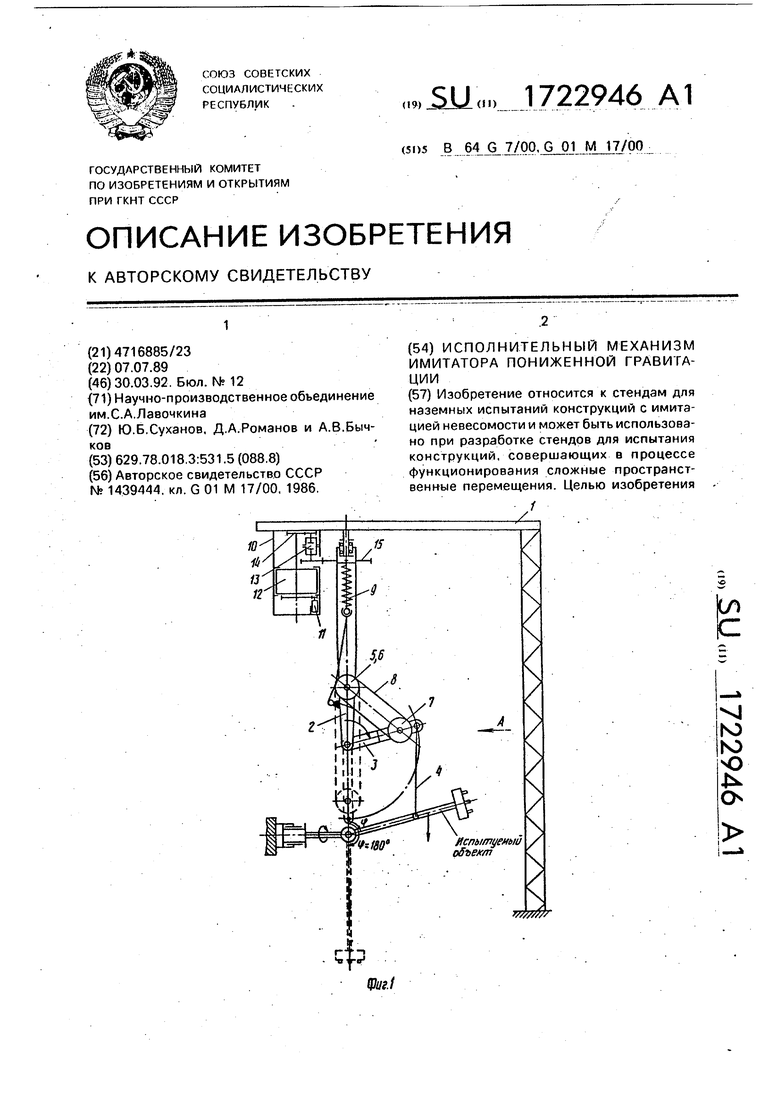
Изобретение относится к имитации космических условий, в частности к стенкам для наземных испытаний конструкций с имитацией невесомости, и может быть использовано при разработке стендов для испытаний конструкций, совершающих в процессе функционирования сложные пространственные перемещения.
Наиболее близким техническим реше- нием к предлагаемому является исполнительный механизм имитатора пониженной гравитации, содержащий основание и два шарнирно связанных между собой звена, выполненных в виде вилок, упругий элемент обезвешивания, трособлочную систему и подвеску для объекта испытаний, причем одна из вилок установлена на основании имитатора вертикально, элемент обезвешивания размещен в вертикальной вилке и од- ним концом жестко связан с ней, другим концом посредством трособлочной системы - с второй вилкой, свободный конец которой шарнирно соединен с подвеской для объекта испытаний.
Недостатком известных решений является ограничение функциональных возможностей устройства, так как они обеспечивают проведение испытаний толь- ко объектов с плоской или строго ограниченной зоной функционирования.
Цель изобретения - расширение функциональных возможностей устройства за счет расширения зоны возможных переме- щений объекта испытании.
Указанная цель достигается тем, что в исполнительном механизме имитатора пониженной гравитации, содержащем основание и два шарнирно связанных между собой звена, выполненные в виде втулок, упругий элемент обезвешивания, трособлочную систему и подвеску для испытуемого объекта, причем одна из вилок установлена на основании имитатора вертикально, элемент обезвешивания размещен в вертикальной вилке и одним концом жестко связан с ней,
другим концом посредством трособлочной системы - с второй вилкой, свободный конец которой шарнирно соединен с подвеской для объекта испытаний, вертикальная вилка установлена с возможностью вращения относительно своей продольной оси и снабжена приводом вращения, связанным с ней посредством предохранительной муфты.
На фиг.1 представлен исполнительный механизм, общий вид; на фиг.2 - вид А на фиг.1.
Исполнительный механизм имитатора пониженной гравитации содержит основание 1 (фиг.1), на котором с возможностью вращения относительно вертикальной оси установлена вертикальная вилка 2, На конце вилки 2 шарнирно установлена вилка 3. на свободном конце которой закреплена подвеска 4, связывающая вилку 3 с испытуемым объектом. На вилках 2 и 3 шарнирно закреплены блоки 5-7 (фиг.2), огибаемые гибкой связью - тросом 8, причем один конец троса 8 закреплен на вилке 2, а другой - заделан на упругом элементе - пружине 9 растяжения, которая также закреплена на вилке 2. На основании 1 установлен привод 10, состоящий из связанных между собой электродвигателя 11, зубчатого редуктора 12 и предохранительной многодисковой муфты 13. При этом один конец муфты кинематически связан с выходной шестерней 14 редуктора 12, а другой - с шестерней 15, жестко закрепленной на вилке 2.
Устройство работает следующим образом.
Испытуемый объект соединен с подвеской 4 исполнительного механизма посредством шарнирного узла. При этом упругий элемент 9, взаимодействуя с испытуемым объектом через трособлочную систему 5-8, вилку 3 и подвеску 4, обеспечивает.обезве- шивание испытуемого объекта.
.В процессе испытаний объект испытаний может совершать перемещение в вертикальной плоскости на угол ( вокруг своей продольной оси на угол О,
Исполнительный механизм обеспечивает отслеживание пространственного положения объекта испытаний за счет поворота вилки 3 синхронно с перемещениями объекта в вертикальной плоскости на угол р.
Электродвигатель 11 обеспечивает постоянное вращение, передаваемое через редуктор 12 на муфту 13.
При углах р, отличных от 180°, момент сопротивления вращению на шестерне 15 превышает допустимый крутящий момент на муфте 13, в результате чего муфта 13 размыкает кинематическую связь между шестерней 14 редуктора 12 и шестерней 15, жестко закрепленной на вилке 2, и вращение на вилку 2 не передается.
При перемещении объекта на угол р, близкий к 180°, когда оси шарниров, соединяющих вилки 2 и 3, а также вилку 3 с подвеской 4 и подвеску 4 с объектом испытаний, находятся в одной плоскости, вилки 2 и 3, связанные между собой поперечным шарниром, получают возможность свободного вращения относительно продольной оси вилки 2, т.е. момент сопротивления вращению на шестерне 15 становится близким к нулю.
Срабатывает муфта 13, восстанавливается кинематическая связь между шестернями 14 и 15, в результате чего усилие от .привода 11 передается на вилки 2 и 3, которые приводятся во вращение относительно неподвижной подвески 4.
Исполнительный механизм готов к началу перемещения объекта испытаний в любой другой вертикальной плоскости в пределах заданной зоны.
Например, при необходимости перемещения объекта в плоскости, совпадающей с плоскостью размещения осей шарниров вилок 2 и 3 и подвески 4 (угол р 180°), включается привод перемещения объекта.
В момент, когда вилки 2 и 3 в процессе вращения окежутся в положении, в котором плоскость расположения оси шарнирного
соединения этих вилок и их продольной оси перпендикулярна плоскости перемещения объекта испытаний (фиг.2), объект и связанная с ним посредством подвески 4 вилка 3
5 начинают перемещаться. Одновременно прекращается вращение вилок 2 и 3, так как этому препятствует подвеска 4, связанная с объектом, возрастает момент сопротивления вращению на шестерне 15, срабатывает
0 муфта 13 и разрывает кинематическую связь между шестернями 14 и 15.
Таким образом, изобретение обеспечивает самоориентирование звеньев исполни- тельйого механизма при перемещениях
5 объекта с переходом через положение мертвой точки (р 180°), что существенно расширяет функциональные возможности исполнительного механизма за счет обеспечения возможности испытания объектов, со- 0 вершающих в процессе функционирования сложные пространственные перемещения.
Формула изобретения Исполнительный механизм имитатора
5 пониженной гравитации, содержащий основание и два шарнирно связанных между собой звена, выполненных в виде вилок, упругий элемент обезвешивания, трособ- лочную систему и подвеску для объекта ис0 пытаний, причем одна из вилок установлена на основании имитатора вертикально, элемент обезвешивания размещен в вертикальной вилке и одним концом жестко связан с ней, а другим концом посредством
5 трособлочной системы - с второй вилкой, свободный конец которой шарнирно соединен с подвеской для объекта испытаний, о т- личающийся тем, что, с целью расширения функциональных возможностей уст0 ройства за счет расширения зоны возможных перемещений объекта испытаний, вертикальная вилка установлена с возможностью вращения относительно своей продольной оси и снабжена приводом вра5 щения, связанным с ней посредством предохранительной муфты.
Испытуемый объект
| Силовой элемент имитатора пониженной гравитации | 1986 |
|
SU1439444A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
