Изобретение относится к рыбопромысловой технике и может быть использовано на судах рыбопромыслового и научно-исследовательского флота для поиска и обнаружения рыбы и других объектов лова.
Известна гидроакустическая система контроля параметров трала, содержащая соединенные между собой надводный и подводный модули, причем надводный модуль включает блок обработки и отображения информации, а подводный модуль включает акустическую излучающую систему из гидроакустического преобразователя и возбуждающего генератора, а также дистанционного переключения угла наклона отклонения оси преобразователя от оси трала (патент РФ №2122788, МПК А01К 73/02, опубл. 10.12.1998 г.).
Недостатком данной системы является большая погрешность определения ориентации рыбы относительно трала, так как регистрация косяков рыбы происходит вдали от трала штатным рыболокатором судна.
Известна гидроакустическая система контроля параметров трала, содержащая соединенные между собой кабельной линией связи надводный и подводный модули, при этом подводный модуль выполнен в виде траловой гидроакустической антенны, закрепленной на верхней подборе трала так, чтобы зондирование осуществлялось вертикально вниз, а надводный модуль включает блок управления, усилитель эхосигналов, генератор посылок и блок отображения информации (В.М.Букатый, Промысловая гидроакустика и рыболокация, Изд-во «Мир», Москва, 2003 г., стр.446).
Недостатком данного устройства является невозможность определения косяков рыбы в горизонтальной плоскости, так как направленная вниз от верхней подборы трала гидроакустическая антенна позволяет регистрировать только нижнюю подбору, дно водоема и косяк рыбы между верхней и нижней подборами.
Известна гидроакустическая система контроля параметров трала, содержащая соединенные между собой кабельной линией связи надводный и подводный модули, при этом подводный модуль выполнен в виде гидроакустической приемо-излучающей антенны, выполненной в виде N-го количества эхолокационных датчиков вертикального зондирования, расположенных на поперечных усах, имеющих на концах углубители и компенсирующие подъемные средства, а также регулирующие величину развода усов ответвители, при этом концы усов соединены с буксирующим судном посредством траловых вееров, а надводный модуль содержит судовые бортовые электронные блоки обработки и отображения принятой акустической информации со схемой запуска (патент РФ №22229226, МПК А01К 79/00, опубл. 27.05.2004 г.).
Недостатком данного устройства является малая эффективность обнаружения и определения фактического количества рыбы в придонных слоях водной среды, так как при эхолокации остаются непросматриваемые зоны.
Наиболее близкой по технической сущности и достигаемому результату к предлагаемому изобретению (прототипом) является известная гидроакустическая система контроля параметров трала, содержащая надводный модуль, расположенный на буксирующем судне, соединенный с ним через кабельную линию связи и закрепленный на трале подводный модуль, причем подводный модуль включает гидроакустическую антенну вертикального зондирования с излучающе-приемным трактом, а надводный модуль включает блок обработки и отображения принятой акустической информации, при этом гидроакустическая антенна вертикального зондирования выполнена из N-го количества эхолокационных датчиков с пересечением зон действия соседних эхолокационных датчиков, каждый из которых выполнен двух или трех секционным вдоль линии, проходящей через их последовательность, каждый из этих датчиков снабжен двумя дополнительными каналами приема отраженных сигналов, причем блок обработки и отображения принятой акустической информации надводного модуля снабжен блоком разделения эхосигналов, принятых каждым из датчиков, поступающих с левой и правой частей их зон действия относительно вертикальных плоскостей, блоком выделения сигналов от одних и тех же рыб (патент РФ №2275654, МПК G01S 15/96, опубл. 27.04.2006 г.).
Недостатком прототипа является малая эффективность обнаружения, так как в нем отсутствует возможность зондирования в горизонтальной плоскости, и сложность реализации вертикального сканирования из-за большого количества эхолокационных датчиков.
Техническим результатом изобретения является создание гидроакустической системы контроля трала повышенной эффективности за счет обеспечения сканирования пространства в горизонтальной плоскости, позволяющего определить степень заполнения трала и положение косяка рыбы снаружи трала, а также полного устранения непросматриваемых зон в вертикальном сечении трала и исключения повторного счета рыбы.
Технический результат достигается за счет того, что в гидроакустической системе контроля параметров трала, содержащей надводный модуль, расположенный на буксирующем судне, соединенный с ним через кабельную линию связи и закрепленный на трале подводный модуль, причем подводный модуль включает гидроакустическую антенну вертикального обзора с излучающе-приемным трактом, а надводный модуль включает блок обработки и отображения принятой акустической информации, подводный модуль снабжен второй гидроакустической антенной горизонтального обзора, причем обе гидроакустические антенны вместе с излучающе-приемным трактом размещены в одном герметичном корпусе, закрепленном на верхней подборе трала, излучающе-приемный тракт подводного модуля выполнен в виде последовательно подключенных к входам соответствующих гидроакустических антенн блоков переключения режимов, многоканальных усилителей эхосигналов, аналого-цифровых преобразователей, а также блока коммутации сигналов линии связи, к входам которого подключены выходы аналого-цифровых преобразователей, и генераторов излучаемых сигналов, подключенных к соответствующим входам блоков переключения режимов, а надводный модуль включает блок коммутации сигналов линии связи, выходы которого через соответствующие последовательно соединенные формирователи характеристик направленности гидроакустических антенн, блоки корреляционной обработки сигналов и квадратичные детекторы соединены с входами блока обработки и отображения информации, причем гидроакустическая антенна горизонтального обзора выполнена в форме по меньшей мере двух горизонтальных рядов приемо-излучающих элементов, размещенных на цилиндрической поверхности с вертикальной осью, а гидроакустическая антенна вертикального обзора выполнена в форме полуокружности из набора приемо-излучающих элементов, обращенной вертикально вниз и лежащей в плоскости, перпендикулярной осевой линии трала.
На чертеже представлена блок-схема предлагаемого устройства. Устройство содержит надводный модуль 1, расположенный на буксирующем судне (на чертеже не показано), соединенный с ним через кабельную линию связи 2 и закрепленный на верхней подборе трала (на чертеже не показан) подводный модуль 3, который включает гидроакустическую антенну вертикального обзора 4, выполненную в форме полуокружности из набора приемо-излучающих элементов 5, обращенной вертикально вниз и лежащей в плоскости, перпендикулярной осевой линии трала, гидроакустическую антенну горизонтального обзора 6, выполненную в форме по меньшей мере двух горизонтальных рядов приемо-излучающих элементов, размещенных на цилиндрической поверхности с вертикальной осью, причем обе гидроакустические антенны 4 и 6 вместе с излучающе-приемным трактом размещены в одном герметичном корпусе (на чертеже не показан), закрепленном на верхней подборе трала, излучающе-приемный тракт подводного модуля выполнен в виде последовательно подключенных к входам соответствующих гидроакустических антенн блоков переключения режимов 8 и 8', многоканальных усилителей эхосигналов 9 и 9', аналого-цифровых преобразователей 10 и 10', а также блока коммутации сигналов линии связи 11, к входам которого подключены выходы аналого-цифровых преобразователей 10 и 10', и генераторов излучаемых сигналов 12 и 12', подключенных к соответствующим входам блоков переключения режимов 8 и 8', а надводный модуль включает блок коммутации сигналов линии связи 13, выходы которого через соответствующие последовательно соединенные формирователи характеристик направленности гидроакустических антенн 14 и 14', блоки корреляционной обработки сигналов 15 и 15' и квадратичные детекторы 16 и 16' соединены с входами блока обработки и отображения принятой акустической информации 17.
Устройство работает следующим образом. В режиме излучения сигналы, сформированные генераторами излучаемых сигналов 12 и 12' подводного модуля 3, с помощью блоков переключения режимов 8 и 8' подключаются к элементам антенн соответственно горизонтального 6 и вертикального 4 обзора. При этом, благодаря форме антенн в виде окружности и полуокружности, осуществляется непрерывное облучение всего пространства в горизонтальной плоскости и нижнего полупространства в вертикальной плоскости. В режиме приема эхо-сигналы, принимаемые элементами этих антенн, через блоки переключения режимов 8 и 8' последовательно подключаются к соответствующим входам многоканальных усилителей 9 и 9', аналого-цифровых преобразователей 10 и 10'. Цифровые сигналы с помощью блока коммутации 11 и кабельной линии 2 передаются на надводный модуль 1, в котором с помощью блока коммутации 13 подключаются на блоки обработки сигналов антенн горизонтального и вертикального обзора. Обработка включает формирование веера характеристик направленности антенн в облученных секторах с помощью блоков 14 и 14', вычисление корреляционной функции с соответствующими излученными сигналами в блоках 15 и 15', ее амплитуды с помощью квадратичных детекторов 16 и 16'. Результаты обработки представляются блоком обработки и отображения принятой акустической информации 17 в виде распределения мощности эхо-сигнала в координатах угол-дистанция отдельно в горизонтальной и вертикальной плоскостях. Совокупность отметок от рыб, формируемых в горизонтальной плоскости, свидетельствует о степени заполнения трала, а также о наличии и положении рыбного косяка снаружи трала. Совокупность отметок от рыб, формируемых в вертикальной плоскости, свидетельствует о числе рыб, находящихся в устье трала. За счет формирования непрерывного веера сканирующих лучей непросматриваемые зоны полностью устраняются. Вследствие того, что эти лучи за пределами антенны не пересекаются, возможность формирования в блоке отображения нескольких отметок от одной и той же рыбы также полностью исключается.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОИСКА И ОБНАРУЖЕНИЯ РЫБЫ | 2004 |
|
RU2275654C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА РЫБЫ | 2002 |
|
RU2229226C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РАЗМЕРОВ РЫБ В ПРОЦЕССЕ ИХ ПОИСКА | 2008 |
|
RU2367151C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СЕЛЕКТИВНОСТИ РЫБОЛОВНОГО ТРАЛА | 2012 |
|
RU2483535C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2014 |
|
RU2568339C1 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2576349C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2010 |
|
RU2421755C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА УЛОВИСТОСТИ ТРАЛА | 2010 |
|
RU2440589C2 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОБРАБОТКИ РЫБОПРОМЫСЛОВОЙ ИНФОРМАЦИИ | 2015 |
|
RU2582624C1 |
Изобретение относится к рыбопромысловой технике и может быть использовано на судах рыбопромыслового и научно-исследовательского флота для поиска и обнаружения рыбы и других объектов лова. Техническим результатом изобретения является повышение эффективности. Устройство содержит надводный модуль 1, расположенный на буксирующем судне, линию связи 2 и закрепленный на верхней подборе трала подводный модуль 3, который включает гидроакустическую антенну вертикального обзора 4, выполненную в форме полуокружности из набора приемо-излучающих элементов 5, гидроакустическую антенну горизонтального обзора 6, выполненную в форме по меньшей мере двух горизонтальных рядов приемо-излучающих элементов 7, обе гидроакустические антенны 4 и 6 вместе с излучающе-приемным трактом размещены в одном герметичном корпусе, Излучающе-приемный тракт 3 подводного модуля содержит блоки переключения режимов 8 и 8', многоканальные усилители эхосигналов 9 и 9', аналого-цифровые преобразователи 10 и 10', а также блок коммутации сигналов линии связи 11 и генераторов излучаемых сигналов 12 и 12'. Надводный модуль 1 включает блок коммутации сигналов линии связи 13, формирователи характеристик направленности гидроакустических антенн 14 и 14', блоки корреляционной обработки сигналов 15 и 15' и квадратичные детекторы 16 и 16' соединены с входами блока обработки и отображения принятой акустической информации 17. 2 з.п. ф-лы, 1 ил.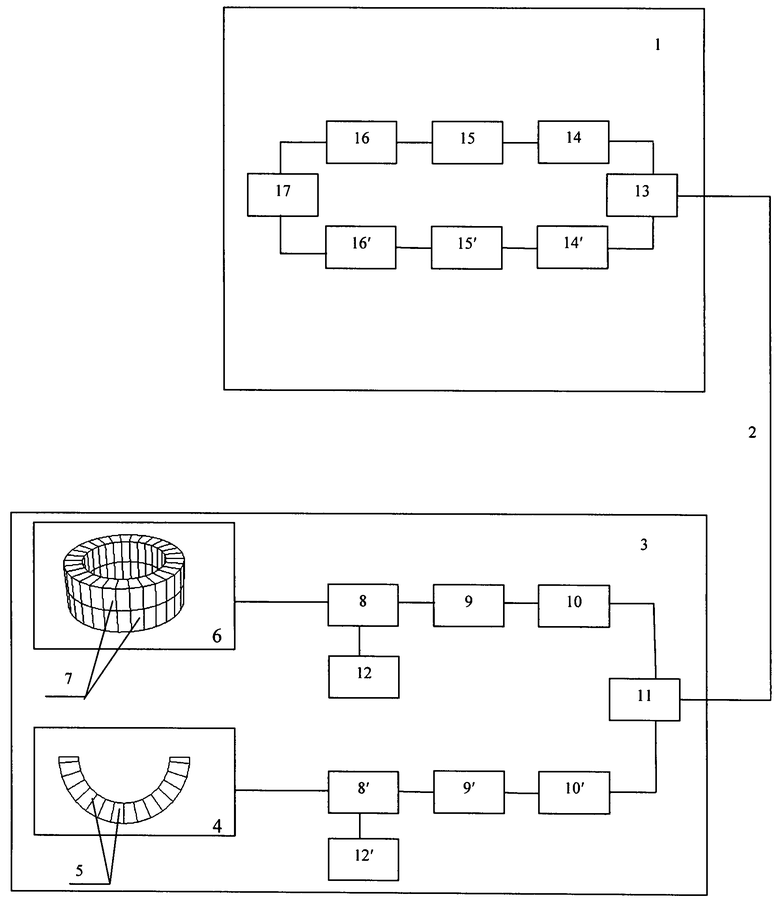
1. Гидроакустическая система контроля параметров трала, содержащая надводный модуль, расположенный на буксирующем судне, соединенный с ним через кабельную линию связи и закрепленный на трале подводный модуль, причем подводный модуль включает гидроакустическую антенну вертикального обзора с излучающе-приемным трактом, а надводный модуль включает блок обработки и отображения принятой акустической информации, отличающаяся тем, что подводный модуль снабжен второй гидроакустической антенной горизонтального обзора, причем обе гидроакустические антенны вместе с излучающе-приемным трактом размещены в одном герметичном корпусе, закрепленном на верхней подборе трала, излучающе-приемный тракт подводного модуля выполнен в виде последовательно подключенных к входам соответствующих гидроакустических антенн блоков переключения режимов, многоканальных усилителей эхосигналов, аналого-цифровых преобразователей, а также блока коммутации сигналов линии связи, к входам которого подключены выходы аналого-цифровых преобразователей, и генераторов излучаемых сигналов, подключенных к соответствующим входам блоков переключения режимов, а надводный модуль включает блок коммутации сигналов линии связи, выходы которого через соответствующие последовательно соединенные формирователи характеристик направленности гидроакустических антенн, блоки корреляционной обработки сигналов и квадратичные детекторы соединены с входами блока обработки и отображения принятой акустической информации.
2. Гидроакустическая система контроля параметров трала по п.1, отличающаяся тем, что гидроакустическая антенна горизонтального обзора выполнена в форме по меньшей мере двух горизонтальных рядов приемоизлучающих элементов, размещенных на цилиндрической поверхности с вертикальной осью.
3. Гидроакустическая система контроля параметров трала по п.1, отличающаяся тем, что гидроакустическая антенна вертикального обзора выполнена в форме полуокружности из набора приемоизлучающих элементов, обращенной вертикально вниз и лежащей в плоскости, перпендикулярной осевой линии трала.
| УСТРОЙСТВО ДЛЯ ПОИСКА РЫБЫ | 2002 |
|
RU2229226C1 |
| СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ ТРАЛА | 0 |
|
SU379243A1 |
| Способ укладки железнодорожного пути | 1948 |
|
SU75060A1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| Способ разведения личинок хирономид (мотыля) для рыбоводства и устройство для осуществления способа | 1953 |
|
SU98087A1 |
| СПОСОБ ИМПУЛЬСНОГО УПРОЧНЕНИЯ СФЕРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2008 |
|
RU2370355C1 |
| Способ получения фосфорной кислоты | 1981 |
|
SU1011509A1 |

