Изобретение относится к рыбопромысловой технике и предназначено для использования на судах рыболовного и научно-исследовательского флота для поиска и обнаружения рыбы и других объектов лова.
Известны устройства для поиска рыбы, например, судовые гидроакустические рыбопоисковые приборы - эхолоты, содержащие излучающе-приемную систему (систему излучения акустических локационных импульсов и приема отраженных сигналов), блок обработки принятых отраженных сигналов (эхосигналов) и блок отображения гидроакустической информации со схемой запуска излучающе-приемной системы /см., например, 1/.
Основным недостатком таких устройств являются весьма ограниченные возможности обнаружения придонных и донных рыб и других объектов промысла, находящихся вблизи дна.
Для улучшения возможностей рыбопоисковых эхолотов при поиске рыбы вблизи дна известен ряд электронно-схемных устройств, которые в некоторых определенных ситуациях несколько повышают эффективность аппаратуры при выделении рыбы у дна /см., к примеру, 2/, т.е. они только частично компенсируют указанный недостаток. В книге К.И. Юданова /3, с.87/ указывается:... " Практика показывает, что эхолоты не всегда регистрируют разреженную рыбу у грунта...". Возможности обнаружения придонных и донных рыб эхолотами еще более ухудшаются при волнении моря.
Более эффективными в этом отношении являются устройства для поиска рыбы с буксируемыми акустическими излучающе-приемными системами /см., к примеру, 4/. Повышение эффективности обнаружения ими придонных и донных рыб и других объектов промысла, находящихся вблизи дна, обеспечивается в данном случае за счет возможности приближения акустической излучающе-приемной системы к дну и, соответственно, повышения разрешающей способности, исключения влияния волнения на получаемые показания рыбы и др. Тем не менее, остается самый серьезный недостаток - малая зона обнаружения рыб, находящихся вблизи дна. Это обусловлено маскировкой придонных показаний эхолотов отражениями от дна /3/. Основная причина указанной маскировки - сферичность фронта акустических волн /3/. Как указывается в работе /3, с.88-89/, "...эффективная зона обнаружения придонной рыбы эхолотом определяется только глубиной места и положением рыбы относительно дна; от ширины характеристики направленности антенны она не зависит. Характерно также, что при регистрации придонной рыбы фактически используется очень узкая часть звукового пучка и поперечник зоны имеет весьма ограниченные размеры".
В качестве прототип заявленного устройства может быть выбран гидроакустический рыбопромысловый комплекс "Дейма" /1, с.98-107/. Он содержит бортовые блоки обработки и отображения принимаемых эхосигналов со схемой запуска излучающе-приемной акустической системы, находящейся в буксируемом носителе (приспособлении). В связи с возможностью приближения акустической излучающе-приемной системы к дну в нем несколько устраняется (снижается) недостаток, обусловленный сферичностью фронта акустической волны эхолота, однако, это улучшение поисковых возможностей совершенно недостаточно для обеспечения сколь-либо эффективного поиска рыбы вблизи дна в связи с (как было указано) ограниченными размерами поперечника зоны обнаружения. Особенно наглядно это проявляется при гидроакустических и траловых съемках состояния рыбных запасов в промысловых районах. Так, к примеру, Заферман М.Л., в своей работе /5/ указывает:..."Сравнение величины улова с энергией эхосигналов (рыбопоискового эхолота) из придонного слоя, равного по высоте вертикальному раскрытию донного трала, показывает практическое отсутствие корреляции между ними (R=0,3-0,4)".
Целью предлагаемого устройства является повышение эффективности обнаружения рыб и других промысловых объектов в придонном слое.
Поставленная цель достигается тем, что акустическая излучающе-приемная система (система излучения акустических локационных импульсов и приема отраженных сигналов) устройства для поиска рыбы выполнена в виде n-го количества эхолокационных датчиков (вертикального зондирования), в процессе поиска с помощью отводителей, углубителей и компенсирующих плавучестей (подъемных средств) буксируемого приспособления перемещающихся на определенном (выбранном) расстоянии от дна (грунта) и посредством последовательностей или параллельной квазиодновременной вертикальной локации обеспечивающих озвучивание придонной области (слоя) заданной или выбранной вертикальной протяженности (высоты) от дна и заданной или выбранной горизонтальной протяженности в плоскости, перпендикулярной направлению движения судна и, соответственно, обнаружение в ней (в нем) рыбы и других объектов лова.
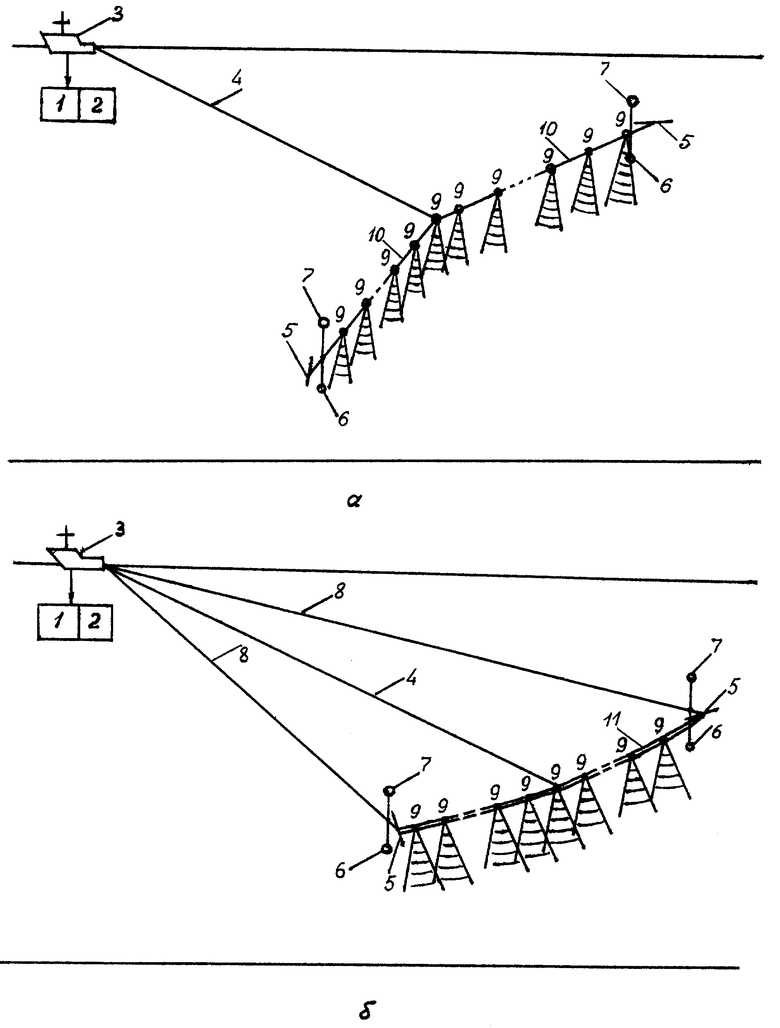
На чертеже представлена схема, поясняющая построение и работу предлагаемого устройства в двух предпочтительных вариантах реализации с учетом максимального применения уже имеющегося на поисковом судне оборудования, а именно: а - с использованием кабель-троса связи штатного тралового зонда рыболовного или поискового судна, б - с использованием траловых ваеров и кабель-троса связи тралового зонда рыболовного или поискового судна.
При запуске излучающе-приемной системы с судна с помощью акустических сигналов вместо кабель-троса в первом варианте реализации (а) может быть использован просто трос, а при втором варианте (б) кабель-трос может быть вообще исключен.
На чертеже показаны бортовые блоки 1, 2 обработки принятых отраженных сигналов (эхосигналов) и отображения гидроакустической информации со схемой запуска подводных эхолокационных датчиков, установленные на судне 3, бортовой кабель-трос 4 связи судовых и подводных блоков штатного тралового зонда судна 3, отводители 5, углубители 6, компенсирующие плавучесть (подъемные средства) 7, траловые ваера 8, акустическая излучающе-приемная система (система излучения акустических локационных импульсов и приема отраженных сигналов), состоящая из n-го количества эхолокационных датчиков 9, дополнительные усы 10 в варианте реализации а, присоединенные к кабель-тросу 4, и гибкая связь 11 межу траловыми ваерами 8 или отводителями 5 в варианте реализации 6, к которым крепятся эхолокационные датчики 9. Усы 10 и связь 11 могут быть выполнены в виде обычного троса, каната или отрезков кабель-троса с герметичными разъемами. Отводители 5 в обоих вариантах реализации используются для обеспечения необходимой ширины зоны поиска (т.е. ее размеров в плоскости, перпендикулярной направлению движения судна), а углубители 6 и компенсирующие плавучести (подъемные средства) 7 - для обеспечения получения требуемого или заданного отстояния эхолокационных датчиков 9 от дна при движении судна 3. Кроме отводителей 5 ширина зоны поиска регулируется длиной дополнительных усов 10 (в варианте реализации а) или гибкой связи 11 (в варианте реализации б).
Работа предлагаемого устройства для поиска рыбы осуществляется следующем образом.
После отдачи кабель-троса 4 с усами 10 или траловых ваеров 8 с кабель-тросом 4 и связью 11 (при варианте реализации б) с помощью отводителей 5, углубителей 6 и компенсирующих плавучестей (подъемных средств) 7 обеспечивается необходимое положение усов 10 (при варианте реализации а) и связи 11 (при варианте реализации б), как показано на чертеже. Схемой запуска бортовых блоков устройства по кабель-тросу 4 подается сигнал на включение в работу первого (в данном случае находящегося в центре буксировочного приспособления - см. чертеж) из эхолокационных датчиков 9 (при последовательном запуске датчиков, т.е. при последовательном лоцировании придонной области - слоя).
Указанный датчик излучает импульс лоцирования в направлении дна и начинает принимать и передавать через тот же кабель-трос связи 4 к бортовому блоку 1 обработки отраженных от рыбы (при ее наличии в данном месте) сигналы-эхосигналы. По сигналу запуска этот же датчик через отдельный акустический преобразователь траверзного направления излучения одновременно посылает сигнал управления работой эхолокационных датчиков 9, расположенных сначала, к примеру, справа от первого, затем второй акустический преобразователь траверзного направления излучения расположенных слева от первого.
Может осуществляться запуск эхолокационных датчиков с борта судна и без использования кабеля, а именно, по гидроакустическому каналу связи - в этом случае может быть обеспечен как последовательный, так и практически одновременный запуск сразу всех эхолокационных датчиков, хотя первый вариант (по кабель-тросу) является более предпочтительным в отношении более простой практической реализации датчиков.
При использовании в усах 10 и связи 11 отрезков кабель-троса с герметичными разъемами (как было указано) для последовательного соединения друг с другом эхолокационных датчиков 9 может быть обеспечено управление их работой без дополнительных акустических преобразователей траверзного направления излучения, а лишь с помощью электрических сигналов со схемы запуска блоков 1, 2 как последовательно каждого датчика, так и одновременно всех датчиков 9.
При последовательном запуске датчиков 9 включение в работу следующего датчика 9 (после первого) производится через временной интервал, несколько больший времени прохождения звука от датчика до дна и обратно. К примеру, при движении усов 10 или связи 11 на расстоянии 10 м от дна он будет несколько больше 13 мс. Если принять его равным 15 мс, то примерно за 1 с могут сработать свыше 60 датчиков 9 с соответствующим n-кратным расширением зоны обнаружения по сравнению с прототипом. Выбор небольшого отстояния от грунта в предлагаемом устройстве целесообразен со всех точек зрения. Благодаря этому может быть обеспечен просмотр достаточно широкой в поперечной плоскости придонной области в течение короткого промежутка времени, могут быть применены весьма высокочастотные эхолокационные датчики, соответственно, имеющие высокую разрешающую способность по вертикали, т.е. уверенное обнаружение рыб в непосредственной близости от дна, а также весьма малое энергопотребление в связи с малой необходимой мощностью излучаемых локационных импульсов и, соответственно, малые габариты как акустических антенн, так и самих блоков, что важно для подводной аппаратуры. В течение вышеуказанного временного интервала происходит передача к блоку 1 принятой данным блоком 9 гидроакустической информации - при передаче по акустической линии связи через дополнительный акустический преобразователь траверзного направления излучения указанного датчика 9, а при применении указанных отрезков кабель-троса непосредственно по получающейся общей кабель-тросовой линии связи.
При одновременном параллельном запуске всех датчиков 9 необходимо некоторое усложнение электронных схем каждого из датчиков для запоминания принятой в цикле работы датчика гидроакустической информации и последующей ускоренной (более быстрой) ее передачи на борт судна. После окончания работы второго блока 9 при последовательном запуске производится запуск третьего способом, аналогичным ранее изложенному, и т.д.
Блоки 1 и 2 производят обработку и отображение принятой эхолотной информации из приданного слоя в различных режимах: выбранных оператором данных отдельных датчиков, суммарную информацию и др. При движении судна 3 таким способом производится обнаружение рыб и других объектов лова в широкой придонной области (в плоскости, перпендикулярной направлению движения судна). При траловых и акустико-траловых съемках целесообразной шириной придонной зоны обзора представляется ее горизонтальная протяженность, равная расстоянию между траловыми досками или горизонтальному раскрытию донного трала.
Благодаря достигаемому n-кратному расширению зоны поиска значительно повышается эффективность обнаружения рыб и других объектов в придонном слое и, соответственно, производительность их промысла.
Источники информации
1. Тикунов А.И. Рыбопоисковые и электрорадионавигационные приборы, Агропромиздат, 1985, с.98-107.
2. Придонная индикация устройством с импульсом запуска. Патент ФРГ №1516639, опубл.19.03.1970.
3. Юданов К.И. Гидроакустическая разведка рыбы. - С.-Пб.: Судостроение, 1992, с.186.
4. Усовершенствование аппаратуры подводного наблюдения. Патент Великобритании №998489, опубл. 04.07.1965.
5. Заферман М.Л. 1994. Погрешности инструментальной оценки запасов рыб.// Рыб. хоз-во, №3, с.30-32.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2010 |
|
RU2421755C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ОБНАРУЖЕНИЯ РЫБЫ | 2004 |
|
RU2275654C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2014 |
|
RU2558003C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ ТРАЛА | 2010 |
|
RU2447458C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА УЛОВИСТОСТИ ТРАЛА | 2010 |
|
RU2440589C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УЛОВИСТОСТИ ТРАЛА | 2007 |
|
RU2346432C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОБРАБОТКИ РЫБОПРОМЫСЛОВОЙ ИНФОРМАЦИИ | 2015 |
|
RU2582624C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СЕЛЕКТИВНОСТИ РЫБОЛОВНОГО ТРАЛА | 2012 |
|
RU2483535C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РАЗМЕРОВ РЫБ В ПРОЦЕССЕ ИХ ПОИСКА | 2008 |
|
RU2367151C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
Изобретение относится к области промышленного рыболовства. Устройство включает буксируемую акустическую излучающе-приемную систему, судовые бортовые электронные блоки обработки и отображения принятой акустической информации со схемой запуска. Акустическая излучающе-приемная система выполнена в виде n-го количества эхолокационных датчиков вертикального зондирования, располагающихся на поперечных усах, на концах имеющих углубители и компенсирующие подъемные средства, а также регулирующие величину развода усов отводители. Концы усов соединены с судном посредством траловых ваеров. Благодаря этому значительно увеличивается зона и эффективность обнаружения рыб и других объектов лова, находящихся в непосредственной близости от дна. 1 з.п. ф-лы, 1 ил.
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1981 |
|
SU998489A2 |
| Шарнирное устройство | 1988 |
|
SU1516639A1 |
| RU 4939517 C1, 15.01.1994. | |||

