Изобретение относится к электрическим переключателям, к способам и устройствам бесконтактной электронной коммутации, а также к способам и устройствам управления объектами, в частности к устройствам управления бытовыми и технологическими устройствами, игрушками и виртуальными объектами.
Известны многофункциональные переключатели электрических цепей, например, по патентам ES 2189646 A1, 01.07.2003. ES 1041441 A1, 01.07.1999. ES 2204280 A1, 16.04.2004. SU 892499 A1, 23.12.1981. SU 1806415 A1, 30.03.1993. WO 03030196 A2, 10.04.2003.
Известны многофункциональные электрические переключатели, которые можно использовать в разных конфигурациях - как переключатель, переключатель на два направления, двойной переключатель, двухконтурный переключатель на два направления, кроссоверный переключатель и кнопочный переключатель. Одно из таких устройств описано в патенте РФ №2407092.
Однако эти переключатели имеют металлические контактные группы, которые не могут управляться программным путем, сложны и относительно дороги.
Многофункциональные переключатели, в которых конфигурации или функциональные возможности задаются и изменяются программным путем, будем называть многофункциональными переключателями.
Типичными многофункциональными переключателями являются компьютерные клавиатуры, в которых программным путем изменяются раскладки, а также сенсорные экраны.
В качестве многофункциональных переключателей могут использоваться известные устройства ввода информации (US 4546347, 08.10.1985, US 4751380, 14.06.1988, JP 54-126426, 01.10.1979, EP 0081348 A2, 15.06.1983, EP 0146843 A2, 03.07.1985 и пр.), принцип работы которых основан на том, что курсор устройства, отображаемый на дисплее, связывают электронным способом с механическим сенсором, а затем перемещают рукой устройство, действующее на сенсор. На этом принципе работают трекболы, трекпойнты, тачпады и джойстики.
Джойстики позволяют управлять курсором, отображаемым на дисплее, и с помощью специальных программ позволяют осуществлять коммутацию электрических цепей.
Однако специально для коммутации электрических цепей джойстики традиционных конструкций не используются вследствие сложности, дороговизны и больших габаритов.
Известен «Способ управления курсором и устройство для его осуществления» по патенту РФ №2275674. Согласно формуле изобретения «способ управления курсором, отображаемым на дисплее устройства, содержащего, по меньшей мере, корпус, манипулятор, микропроцессор для управления курсором и, по меньшей мере, один датчик манипулятора, заключающийся в том, что отображаемый на дисплее курсор, управляемый с помощью манипулятора рукой пользователя, связывают с датчиком манипулятора путем преобразования сигналов датчика манипулятора в цифровой код, передачи этого кода в микропроцессор и преобразования в нем этого кода в движение курсора, отображаемого на дисплее, а для управления движением курсора прикладывают силовое воздействие к манипулятору в направлении желаемого перемещения курсора и прекращают силовое воздействие при необходимости остановки курсора, причем силовое воздействие, приложенное к манипулятору, передают на упругодеформируемый элемент и вырабатывают сигналы для микропроцессора, управляющего курсором, посредством датчика манипулятора, соединенного с упругодеформируемым элементом, отличающийся тем, что для осуществления возможности не только перемещения, но и вращения курсора, отображаемого на дисплее, на упругодеформируемом элементе датчика размещают тензорезисторы, так чтобы их длинные базовые оси симметрии располагались радиально от центра датчика в разных направлениях, и были наклонены относительно радиального направления, проведенного от центра датчика к центру тензорезистора, на угол тангенциального наклона ci, а для осуществления вращения курсора прикладывают вращающий момент в нужном направлении к манипулятору и прекращают приложение вращающего момента при необходимости остановки курсора».
В описании способа приводятся подробные алгоритмы и формулы для вычисления углов направления нажатия и приращения координат по сигналам тензорезисторов, размещенных в устройстве для осуществления способа.
Устройство управления курсором для осуществления способа по патенту РФ №2275674 содержит размещенные в корпусе манипулятор, по меньшей мере, один датчик манипулятора, соединенный с микропроцессором с помощью шин и средств передачи данных, дисплей с отображаемым на нем курсором, отличающееся тем, что датчик манипулятора содержит по меньшей мере один тензорезистор, расположенный на упругодеформируемом элементе, который механически связан с манипулятором, причем манипулятор выполнен в виде стержня, один конец которого закреплен на упругодеформируемом элементе датчика, а длинная базовая ось симметрии тензорезистора направлена радиально от места закрепления стержня.
Свободный конец манипулятора снабжен головкой, выполненной в виде выпуклой или вогнутой полусферы или полуовала или вогнутости по форме пальца руки. Упругодеформируемый элемент выполнен в виде плоской, конической, выпуклой, вогнутой или цилиндрической сплошной или полой детали.
Наиболее близким к заявляемому изобретению (прототипом) является «Трехмерный микроджойстик» по патенту РФ №2301439.
В соответствии с формулой трехмерный микроджойстик содержит корпус с управляющей рукояткой, которая соединена с упругодеформируемым элементом, на поверхности которого расположены тензорезисторы, соединенные с микропроцессором с помощью шин и средств передачи данных. Упругий элемент трехмерного микроджойстика выполнен в виде осесимметричного полого предмета, сужающегося кверху, с вырезами на его боковой поверхности или без них, на вершине которого закреплена управляющая рукоятка, например, в виде полого конуса с вырезами на его боковой поверхности, на вершине которого закреплена управляющая рукоятка. Тензорезисторы на упругом элементе расположены радиально от центра.
Техническим результатом заявляемого изобретения является создание умного многофункционального переключателя нового поколения.
Многофункциональные переключатели это перепрограммируемые, высокотехнологичные и в то же время дешевые, простые, практически полностью полимерные переключатели.
Предложен способ коммутации электрических цепей и многофункциональный переключатель для его осуществления.
Способ коммутации электрических цепей с помощью манипулятора заключается в том, что на манипулятор, вокруг которого или на котором условно обозначены доступные варианты коммутации цепей, осуществляют нажатие в направлении выбранного варианта коммутации цепей, а затем прекращают нажатие после осуществления коммутации, причем силовое воздействие от нажатия, приложенное к манипулятору, передают на упругодеформируемый элемент, содержащий тензорезисторы, вырабатывающие сигналы для микропроцессора, осуществляющего действия по коммутации электрических цепей с помощью коммутирующих устройств.
Основные отличия заявляемого объекта - способа коммутации электрических цепей заключаются в следующем:
1. С помощью микропроцессора анализируют значения сопротивлений тензорезисторов манипулятора и по их значениям, используя известные алгоритмы, вычисляют угол направления нажатия манипулятора, и если вычисленный угол направления нажатия попадает в диапазоны углов направлений, соответствующие одному из доступных вариантов коммутации цепей, то микропроцессор осуществляет выбранный вариант коммутации цепи с помощью коммутирующих устройств.
Конечно, широко известны круговые пленочные устройства, например, по патенту США №335860, 2003 г. «Pressing direction sensor and input device using the same», выдающие сигнал, показывающий направление движения курсора на дисплее или переключающего режимы работы устройства (плеера, фотоаппарата). Датчик содержит кольцо из пленки резистивного материала, сопротивление которого зависит от места нажатия на него. Там сопротивление одного резистивного датчика непосредственно зависит от места нажатия и для дальнейшей коммутации цепей или управления не требуется никаких дополнительных вычислений. Особенность отличия предлагаемого способа заключается в том, что угол направления нажатия вычисляется по сигналам, одновременно снимаемым сразу с нескольких тензорезисторов, а вычисление производятся с помощью известных алгоритмов, раскрытых, например, в патенте РФ №2275674.
2. Для реализации программным путем однопозиционного включателя-выключателя или конечного выключателя требуемую коммутацию электрической цепи осуществляют в случае попадания вычисленного угла направления нажатия в единственный диапазон углов направления нажатия, соответствующий единственному доступному варианту коммутации цепей.
3. Для реализации программным путем двухпозиционного переключателя-тумблера, а также трех- и многопозиционного переключателя требуемую коммутацию электрических цепей осуществляют в случае попадания вычисленного угла направления нажатия соответственно в два, три или более диапазона углов направления нажатия манипулятора, соответствующих доступным вариантам коммутации цепей.
4. Программным путем изменяют доступные варианты коммутации электрических цепей и их количество в процессе коммутации электрических цепей и в зависимости от ранее выбранного варианта коммутации электрических цепей.
5. Выбранный вариант коммутации электрических цепей отображается с помощью дисплеев или светодиодов, расположенных возле манипулятора или непосредственно на нем.
6. Программным путем изменяют отображаемые с помощью дисплеев или светодиодов доступные варианты коммутации электрических цепей и их вид в процессе коммутации и в зависимости от ранее выбранного варианта коммутации электрических цепей.
Отличия 4, 5, 6 позволяют охарактеризовать уникальную возможность реализации программно-управляемых многофункциональных приборов, заменяющих множество кнопок. Например, сейчас при настройке ТВ-приемника при нажатии на очередную кнопку на экран выводятся выпадающие меню, из которых нужно путем многократного нажатия на разные кнопки пульта выбрать тот или иной пункт, после чего выпадет другое меню и т.п. Это очень неудобно.
В данном способе реализация таких вариантов управления отображается непосредственно на дисплеях, расположенных возле манипулятора или непосредственно на нем, а переход от одного пункта меню к другому осуществляется путем однократного наклона рукоятки к выбранному пункту меню.
Такие функциональные возможности пока были недоступны существующим дешевым массовым устройствам.
Многофункциональный переключатель для осуществления предложенного способа коммутации электрических цепей содержит корпус с управляющей рукояткой, которая соединена с упругодеформируемым элементом, на поверхности которого расположены тензорезисторы, соединенные с микропроцессором с помощью шин и средств передачи данных.
Основные отличия заявляемого объекта - многофункционального переключателя заключаются в следующем.
7.1 Упругий элемент многофункционального переключателя выполнен в виде закрепленного на печатной плате усеченного полого конуса или иной осесимметричной полой фигуры из эластичного материала, сужающейся к низу с вырезами на боковой поверхности или без них, в центре полости которой расположена управляющая рукоятка, которая через отверстие в печатной плате выходит на внешнюю сторону переключателя.
В трехмерном микроджойстике по патенту РФ №2301439 использовался конус из эластичного материала, который, однако, сужался кверху. Управляющая рукоятка была расположена на его вершине снаружи. Конструкция упругодеформируемого элемента заявляемого многофункционального переключателя существенно отличается от известных решений.
7.2. Тензорезисторы представляют собой слой электропроводного эластичного материала на поверхности упругодеформируемого элемента, расположенный с его внешней и/или внутренней стороны, и разделенный вырезами или промежутками так, что стороны тензорезисторов, обращенные к центру упругодеформируемого элемента, были электрически соединены, а их внешние радиально расходящиеся стороны разделены.
В известных устройствах используются, как правило, фольговые тензорезисторы, которые приклеиваются на поверхность деформируемой детали. Известны тензорезисторы, напыляемые на поверхность деталей. Но тензорезисторы, выполненные путем нанесения электропроводного эластичного материала на поверхность упругодеформируемого элемента в виде трех отдельных тензорезисторов, включенных «звездой» (стороны тензорезисторов, обращенные к центру упругодеформируемого элемента, электрически соединены, а их внешние радиально расходящиеся стороны разделены), в подобных устройствах не применялись.
7.3. Упругодеформируемый элемент закреплен на печатной плате путем приклеивания и/или с помощью механических крепежных элементов так, чтобы радиально расходящиеся стороны тензорезисторов были электрически соединены с токопроводящими дорожками на плате, образующими шины и средства передачи данных, соединенные с микропроцессором.
Описанный способ электрического соединения тензорезисторов с токопроводящими дорожками на плате в прототипе не применялся.
8. Для отображения выбранного варианта коммутации и состояния переключателя используются дисплеи или светодиоды, расположенные возле манипулятора или непосредственно на нем.
В прототипе не использованы дисплеи или светодиоды для отображения выбранного варианта коммутации и состояния переключателя, хотя в других устройствах похожие решения применяются. Тем не менее этот признак не используется в рамках признаков многофункционального переключателя и для заявляемого изобретения может быть признан как новый.
9. Свободный конец манипулятора снабжен головкой, выполненной в виде съемной или постоянно закрепленной сферы, выпуклой или вогнутой полусферы или иной формы насадкой.
Этот признак используется в прототипах, однако не используется в рамках признаков многофункционального переключателя и для заявляемого изобретения может быть признан как новый.
10. Упругодеформируемый элемент закреплен на печатной плате механическими крепежными элементами в виде заклепок или штырей.
11. Упругодеформируемый элемент закреплен на печатной плате механическими крепежными элементами в виде скобок или хомутов.
12. Упругодеформируемый элемент приклеен или приварен к печатной плате с использованием бобышек или приливов, расположенных на упругодеформируемом элементе.
Признаки 10-13 в принципе известны, но в устройстве многофункциональных переключателей используются впервые, а поэтому могут быть признаны новыми.
Таким образом, имеется достаточное количество существенных отличий, позволяющих охарактеризовать предложенное решение как новое изобретение.
Описание предлагаемого изобретения поясняется фигурами 1-15:
- на фигурах 1-3 показано устройство вариантов конструкций многофункциональных переключателей с разными вариантами крепления упругодеформируемого элемента к плате;
- на фигурах 2, 4 и 5 показан принцип действия многофункционального переключателя;
- на фигуре 6 показана схема подключения тензорезисторов многофункционального переключателя;
- на фигуре 7 показана схема подключения многофункциональных переключателей к микропроцессору и коммутирующему устройству;
- на фигурах 8-11 показано функционирование дисплеев или светодиодов при отображении состояния многофункционального переключателя;
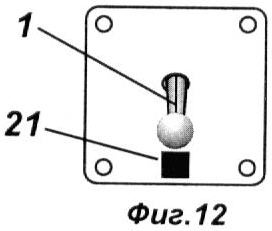
- на фигуре 12 показана работа однопозиционного включателя-выключателя или конечного выключателя;
- на фигуре 13 показана работа многофункционального переключателя в режиме двухпозиционного переключателя-тумблера;
- на фигуре 14 показана работа многофункционального переключателя в режиме трехпозиционного переключателя;
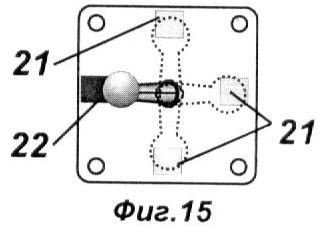
- на фигуре 15 показана работа многофункционального переключателя в режиме четырехпозиционного переключателя.
На фигурах 8-15 положение манипулятора показано в момент нажатия. После отпускания манипулятора он самостоятельно возвращается в исходное среднее положение, а соответствующий светодиод или дисплей отображает текущее состояние выключателя.
На фигурах 1-15 цифрами обозначены:
1 - манипулятор;
2 - управляющая рукоятка;
3 - упругодеформируемый элемент;
4 - головка манипулятора;
5 - вырезы на боковой поверхности упругодеформируемого элемента;
6 - тензорезистор;
7 - печатная плата;
8 - отверстие в печатной плате;
9 - токопроводящая дорожка на плате;
10 - внешняя сторона переключателя;
11 - слой электропроводного эластичного материала;
12 - стержневой крепежный элемент (заклепка);
13 - прилив или бобышка для крепления приклеиванием или сваркой;
14 - скобка для крепления;
15 - многофункциональный переключатель;
16 - микропроцессор;
17 - коммутирующее устройство;
18 - шины и средства передачи данных;
19 - дисплеи или светодиоды;
20 - угол направления нажатия манипулятора;
21 - доступные варианты коммутации цепей;
22 - выбранный вариант коммутации цепи.
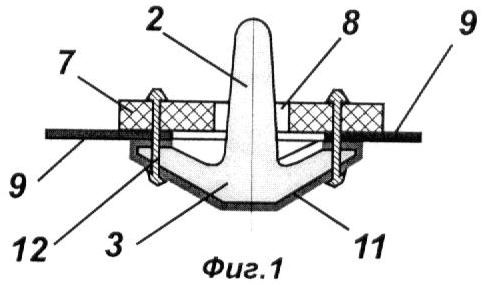
На фигурах 1-3 показан манипулятор 1, состоящий из управляющей рукоятки 2, выполненной за одно целое с упругодеформируемым элементом 3. На управляющей рукоятке 2 для удобства управления установлена головка манипулятора 4 в виде шарика. Упругодеформируемый элемент выполнен из эластичного материала в виде усеченного полого конуса, сужающегося книзу.
В качестве эластичного материала могут использоваться различные сорта резин, силиконов, полиуретанов или иных эластичных полимеров.
На боковой поверхности конуса имеются вырезы 5, разделяющие радиально расходящиеся тензорезисторы 6.
Упругодеформируемый элемент многофункционального переключателя закреплен на печатной плате 7.
Управляющая рукоятка 2 расположена в центре внутренней полости упругодеформируемого элемента 3 и через отверстие 8 в печатной плате 7 выходит на внешнюю сторону переключателя 10.
Тензорезисторы 6 представляют собой слой электропроводного эластичного материала 11 на поверхности упругодеформируемого элемента, расположенный с его внешней и/или внутренней стороны.
В качестве электропроводного эластичного материала могут использоваться электропроводящие полимеры на основе резин, силиконов или иных полимеров, наполненных металлическими пудрами, проводящими допированными полимерами, таких как полианилин, полипиррол, полиацетилен или углеродными наночастицами, а также их смесями.
Тензорезисторы 6 разделяются вырезами 5 или промежутками в упругодеформируемом элементе 3.
Стороны тензорезисторов 6, обращенные к центру упругодеформируемого элемента, электрически соединены за счет непрерывности слоя электропроводного эластичного материала в центре.
Внешние радиально расходящиеся стороны тензорезисторов разделены вырезами 5 или специально сформированными промежутками на упругодеформируемом элементе 3 без электропроводного эластичного материала 11.
Упругодеформируемый элемент 3 закреплен на печатной плате 7 путем приклеивания (Фиг.2) или с помощью механических крепежных элементов (Фиг.1 и 3).
На фиг.1 показано крепление упругодеформируемого элемента 3 к плате 7 с помощью стержневых крепежных элементов 12, типа заклепок, винтов, штырей.
На фиг.2 показано крепление упругодеформируемого элемента 3 к плате 7 с помощью приклеивания или приваривания к печатной плате с использованием бобышек или приливов 13, расположенных на упругодеформируемом элементе 3.
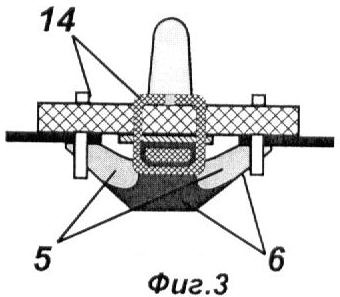
На фиг.3 показано крепление упругодеформируемого элемента 3 к плате 7 с помощью скоб для крепления 14.
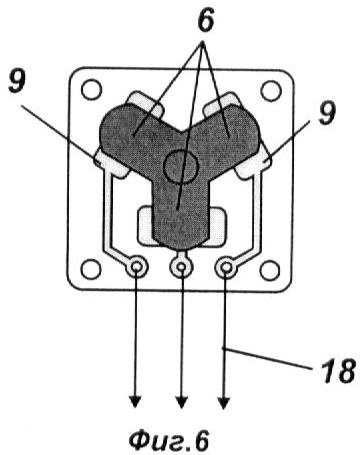
На фигурах 1-3 показано, что слой электропроводного эластичного материала 11, образующий тензорезисторы 6, обходит внешнюю сторону упругодеформируемого элемента 3 и заходит на его внутреннюю сторону. Это обеспечивает электрическое соединение радиально расходящихся сторон тензорезисторов 6 с токопроводящими дорожками 9 на плате 7 при креплении с помощью механических крепежных элементов, при приклеивании или сварке (фиг.6).
Токопроводящие дорожки 9 на плате 7 образуют шины и средства передачи данных 18 и соединяют тензорезисторы 6 каждого многофункционального переключателя с микропроцессором 16 (Фиг.7), который в свою очередь соединен с коммутирующим устройством 17.
Для отображения выбранного варианта коммутации и состояния переключателя используются дисплеи или светодиоды 19, расположенные возле манипулятора или непосредственно на нем (фиг.8-15).
Свободный конец манипулятора 1 снабжен головкой 4, выполненной в виде съемной или постоянно закрепленной сферы. Головка может быть выполнена в виде выпуклой или вогнутой полусферы или иной формы насадкой. Это необходимо в ряде случаев для удобства управления и эргономичности.
На фигуре 4 показано действие пальцем руки на манипулятор 1.
На фигуре 5 показан способ отсчета угла направления нажатия 20 манипулятора 1.
На фигуре 6 показан способ подключения тензорезисторов 6 к плате 7 «звездой».
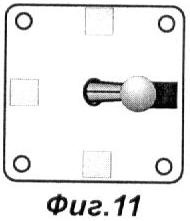
На фигурах 8-11 показано функционирование дисплеев или светодиодов 19 при отображении состояния многофункционального переключателя 15.
На фигурах 8-11 показаны доступные варианты коммутации цепей 21 и выбранные варианты коммутации цепи 22, подсвеченные светодиодами 19.
Описание способа коммутации электрических цепей и принципа действия многофункционального переключателя будет описано совместно.
Многофункциональный переключатель работает следующим образом.
Для того чтобы произвести коммутацию электрических цепей одним из нескольких доступных вариантов, которые условно обозначены на манипуляторе 1, оператор нажимает пальцем руки управляющую рукоятку 2 манипулятора 1 в направлении выбранного варианта коммутации цепей, а затем прекращает нажатие после осуществления коммутации (фиг.2, 4). Силовое воздействие от нажатия, приложенное к манипулятору 1, рукояткой 2 передается на упругодеформируемый элемент 3, содержащий тензорезисторы 6, вырабатывающие сигналы для микропроцессора 16, осуществляющего действия по коммутации электрических цепей с помощью коммутирующего устройства 17. Усилие нажатия на управляющую рукоятку 2 передается на упругодеформируемый элемент 3, что вызывает его деформацию. Деформация упругодеформируемого элемента 3 фиксируется тензорезисторами 6. С помощью шин и средств передачи данных 18 сигналы от тензорезисторов 6 передаются в микропроцессор 16 (фиг.7).
С помощью микропроцессора 16 анализируют значения сопротивлений тензорезисторов 6 манипулятора 1 и по их значениям, используя известные алгоритмы, вычисляют угол направления нажатия 20 манипулятора 1 (фиг.5). Если вычисленный угол направления нажатия 20 попадает в диапазоны углов направлений, соответствующие одному из доступных вариантов коммутации цепей 21, то микропроцессор осуществляет выбранный вариант коммутации цепи 22 с помощью коммутирующего устройства 17 (фиг.7)
Для реализации программным путем однопозиционного включателя-выключателя или конечного выключателя требуемую коммутацию электрической цепи осуществляют в случае попадания вычисленного угла направления нажатия 20 в единственный доступный диапазон углов направления нажатия (фиг.12), соответствующий единственно доступному варианту коммутации цепей.
Для реализации программным путем двухпозиционного переключателя-тумблера (фиг.13), а также трех- и многопозиционного переключателя (фиг.14, 15) требуемую коммутацию электрических цепей осуществляют в случае попадания вычисленного угла направления нажатия соответственно в два, три или более диапазона углов направления нажатия манипулятора, соответствующих доступным вариантам коммутации цепей.
Электронная система, показанная на фиг.7, обладает широкими возможностями. В частности, она позволяет расширить функциональные возможности многофункциональных переключателей программным путем, за счет изменения доступных вариантов коммутации электрических цепей 21 и их количества в процессе коммутации электрических цепей и в зависимости от ранее выбранного варианта коммутации электрических цепей 22.
Для удобства пользователей выбранный вариант коммутации электрических цепей 22 отображается с помощью дисплеев или светодиодов 19, расположенных возле манипулятора или непосредственно на нем (фиг.8-15).
Электронная система, показанная на фиг.7, позволяет программным путем изменять отображаемые с помощью дисплеев или светодиодов 19 доступные варианты коммутации электрических цепей 21 и их вид в процессе коммутации и в зависимости от ранее выбранного варианта коммутации электрических цепей.
Таким образом, предлагаемое изобретение многофункционального переключателя позволяет создать умные переключатели нового поколения.
Многофункциональные переключатели это перепрограммируемые, высокотехнологичные и в то же время дешевые, простые, практически полностью полимерные переключатели. В них нет контактных групп, поэтому ничего не изнашивается. Ресурс даже лабораторных образцов многофункциональных переключателей превышает 2.5 млн. нажатий, что многократно превосходит ресурс лучших представителей контактных переключателей.
При такой высокой надежности в многофункциональных переключателях не используются стратегические материалы и ценные цветные металлы (кроме меди в дорожках платы), дорогостоящие пружинные материалы и т.п. Они могут производиться из полимерных материалов на обычном оборудовании для производства деталей из пластмасс.
Как видно из описания, многофункциональный переключатель по конструкции чрезвычайно прост. Все его элементы могут изготавливаться на автоматических линиях. Сборка многофункциональных переключателей не требует значительных трудозатрат. Это позволяет организовать массовое производство с минимальной себестоимостью.
Разработанные технологии позволяют создавать многофункциональные переключатели, обладающие размерами от 20 до 7 мм и весом от 0.6 до 0.2 граммов. Минимальные массогабаритные характеристики очень важны для космической, авиационной и иной мобильной техники.
Многофункциональные переключатели обладают уникально широким спектром функциональности, выполняя функции простых выключателей, тумблеров или многопозиционных переключателей, они одновременно могут использоваться и как полноценные микроджойстики для ввода информации и для управления объектами.
Более того, функции многофункциональных переключателей могут изменяться программным путем в процессе его работы и в зависимости от предыдущих манипуляций.
Таким широким набором функциональных возможностей не обладает ни один известный коммутирующий микроэлемент.
Обладая уникальным сочетанием простоты, дешевизны, надежности и многофункциональности, предлагаемые многофункциональные переключатели найдут самое широкое применение в электронике.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ МИНИСТИК | 2015 |
|
RU2594992C2 |
| СПОСОБ УПРАВЛЕНИЯ КУРСОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2275674C2 |
| ОПТИЧЕСКИЙ МИНИСТИК С ГЕРКОНАМИ | 2016 |
|
RU2724791C2 |
| ОПТИЧЕСКИЙ ДЖОЙСТИК | 2013 |
|
RU2596576C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ ПРИБОРАМИ И ПУЛЬТ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2520318C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СПЕКТРА ИМПЕДАНСА БИОЛОГИЧЕСКИХ СТРУКТУР | 2019 |
|
RU2722573C1 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА ДИАГНОСТИЧЕСКОЙ ВИЗУАЛИЗАЦИИ С ЗАВИСЯЩЕЙ ОТ КОНТЕКСТА ПАНЕЛЬЮ УПРАВЛЕНИЯ | 2012 |
|
RU2617255C2 |
| ЭЛЕКТРОННАЯ ПИПЕТКА С ДИСПЛЕЕМ И МАНИПУЛЯТОРОМ ДЛЯ УПРАВЛЕНИЯ ЗАБОРОМ И РАСПРЕДЕЛЕНИЕМ ЖИДКОСТИ | 2004 |
|
RU2340397C2 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС ДЛЯ УПРАВЛЕНИЯ ВАННОЙ С ВИХРЕВЫМ ГИДРОМАССАЖЕМ | 2004 |
|
RU2334264C2 |
| ПУЛЬТ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ УСТРОЙСТВАМИ БЫТОВОЙ ТЕХНИКИ И КОМПЬЮТЕРНЫМИ СИСТЕМАМИ | 1997 |
|
RU2127019C1 |








Изобретение относится к электрическим переключателям. Технический результат заключается в создании многофункциональных, перепрограммируемых, высокотехнологичных, практически полностью полимерных устройств, которые обладают широким спектром функциональности, выполняя функции простых выключателей, тумблеров или многопозиционных переключателей, они одновременно могут использоваться и как полноценные микроджойстики для ввода информации и для управления объектами. Такой результат достигается за счет того, что в способе коммутации на манипулятор осуществляют нажатие в направлении выбранного варианта коммутации цепей, которое передают на упругодеформируемый элемент, содержащий тензорезисторы, с помощью микропроцессора анализируют значения сопротивлений тензорезисторов и по их значениям вычисляют угол направления нажатия, если вычисленный угол попадает в диапазоны углов, соответствующих одному из доступных вариантов коммутации цепей, то микропроцессор осуществляет выбранный вариант коммутации цепи с помощью коммутирующих устройств. Полиморфный переключатель отличается тем, что его упругодеформируемый элемент выполнен из эластичного материала в виде усеченного полого конуса с вырезами и управляющей рукояткой и закреплен на печатной плате, а тензорезисторы представляют собой слой электропроводного эластичного материала на поверхности упругодеформируемого элемента. 2 н. и 10 з.п. ф-лы, 15 ил.
1. Способ коммутации электрических цепей с помощью манипулятора, заключающийся в том, что на манипулятор, вокруг которого или на котором условно обозначены доступные варианты коммутации цепей, осуществляют нажатие в направлении выбранного варианта коммутации цепей, а затем прекращают нажатие после осуществления коммутации, причем силовое воздействие от нажатия, приложенное к манипулятору, передают на упругодеформируемый элемент, содержащий тензорезисторы, вырабатывающие сигналы для микропроцессора, осуществляющего действия по коммутации электрических цепей с помощью коммутирующих устройств, отличающийся тем, что c помощью микропроцессора анализируют значения сопротивлений тензорезисторов манипулятора и по их значениям вычисляют угол направления нажатия манипулятора, и если вычисленный угол направления нажатия попадает в диапазоны углов направлений, соответствующие одному из доступных вариантов коммутации цепей, то микропроцессор осуществляет выбранный вариант коммутации цепи с помощью коммутирующих устройств.
2. Способ коммутации электрических цепей по п.1, отличающийся тем, что для реализации программным путем однопозиционного включателя-выключателя или конечного выключателя требуемую коммутацию электрической цепи осуществляют в случае попадания вычисленного угла направления нажатия в единственный диапазон углов направления нажатия, соответствующий единственному доступному варианту коммутации цепей.
3. Способ коммутации электрических цепей по п.1, отличающийся тем, что для реализации программным путем двухпозиционного переключателя-тумблера, а также трех- и многопозиционного переключателя требуемую коммутацию электрических цепей осуществляют в случае попадания вычисленного угла направления нажатия соответственно в два, три или более диапазона углов направления нажатия манипулятора, соответствующих доступным вариантам коммутации цепей.
4. Способ коммутации электрических цепей по п.1, отличающийся тем, что программным путем изменяют доступные варианты коммутации электрических цепей и их количество в процессе коммутации электрических цепей и в зависимости от ранее выбранного варианта коммутации электрических цепей.
5. Способ коммутации электрических цепей по п.1, отличающийся тем, что выбранный вариант коммутации электрических цепей отображается с помощью дисплеев или светодиодов, расположенных возле манипулятора или непосредственно на нем.
6. Способ коммутации электрических цепей по п.1, отличающийся тем, что программным путем изменяют отображаемые с помощью дисплеев или светодиодов доступные варианты коммутации электрических цепей и их вид в процессе коммутации и в зависимости от ранее выбранного варианта коммутации электрических цепей.
7. Многофункциональный переключатель для осуществления способа по п.1, содержащий корпус с управляющей рукояткой, которая соединена с упругодеформируемым элементом, на поверхности которого расположены тензорезисторы, соединенные с микропроцессором с помощью шин и средств передачи данных, отличающийся тем, что упругодеформируемый элемент полиморфного переключателя выполнен в виде закрепленного на печатной плате усеченного полого конуса или иной осесимметричной полой фигуры из эластичного материала сужающейся к низу с вырезами на боковой поверхности или без них, в центре полости которой расположена управляющая рукоятка, которая через отверстие в печатной плате выходит на внешнюю сторону переключателя, а тензорезисторы представляют собой слой электропроводного эластичного материала на поверхности упругодеформируемого элемента, расположенный с его внешней и/или внутренней стороны и разделенный вырезами или промежутками так, что стороны тензорезисторов, обращенные к центру упругодеформируемого элемента, электрически соединены, а их внешние радиально расходящиеся стороны разделены, при этом упругодеформируемый элемент закреплен на печатной плате путем приклеивания и/или с помощью механических крепежных элементов, так, чтобы радиально расходящиеся стороны тензорезисторов были электрически соединены с токопроводящими дорожками на плате, образующими шины и средства передачи данных соединенные с микропроцессором.
8. Многофункциональный переключатель по п.7, отличающийся тем, что для отображения выбранного варианта коммутации и состояния переключателя используются дисплеи или светодиоды, расположенные возле манипулятора или непосредственно на нем.
9. Многофункциональный переключатель по п.7, отличающийся тем, что свободный конец манипулятора снабжен головкой, выполненной в виде съемной или постоянно закрепленной сферы, выпуклой или вогнутой полусферы или иной формы насадкой.
10. Многофункциональный переключатель по п.7, отличающийся тем, что упругодеформируемый элемент закреплен на печатной плате механическими крепежными элементами в виде заклепок или штырей.
11. Многофункциональный переключатель по п.7, отличающийся тем, что упругодеформируемый элемент закреплен на печатной плате механическими крепежными элементами в виде скобок или хомутов.
12. Многофункциональный переключатель по п.7, отличающийся тем, что упругодеформируемый элемент приклеен или приварен к печатной плате с использованием бобышек или приливов, расположенных на упругодеформируемом элементе.
| ТРЕХМЕРНЫЙ МИКРОДЖОЙСТИК | 2005 |
|
RU2301439C1 |
| СПОСОБ УПРАВЛЕНИЯ КУРСОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2275674C2 |
| Стул-автомат | 1925 |
|
SU5816A1 |
| СИСТЕМА ОБРАБОТКИ ИЗОБРАЖЕНИЯ С АНАЛОГОВЫМ ДЖОЙСТИКОМ | 1996 |
|
RU2155368C2 |
| US 4879556 A, 07.11.1989 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

