Изобретение относится к измерениям расхода проводящих жидкостей электромагнитным методом.
Известен способ компенсации квадратурной помехи в выходном сигнале расходомера, предусматривающий получение на зажимах первичного преобразователя ЭДС гармонической формы, в общем случае содержащей в своем составе полезную составляющую, амплитуда которой пропорциональна скорости протекания измеряемой жидкости и трансформаторную помеху той же частоты в виде квадратурной составляющей с фазовым сдвигом 90 эл. градусов (см. например, авт.свид. №411302, №462085, №489946, №507777, №1216655). В измерительных устройствах, работающих по компенсационному принципу, ЭДС первичного преобразователя в качестве задающего сигнала сравнивается с изменяющимся в противофазе компенсационным сигналом. Получаемый при этом сигнал ошибки регулирования подается на исполнительно-регистрирующий орган, вращение электродвигателя которого приводит к изменению компенсирующего сигнала в нужную сторону и тем самым к уменьшению ошибки регулирования. Одновременно с этим угол поворота исполнительного электродвигателя выступает в качестве выходной координаты расходомера, несущей информацию о скорости перемещения измеряемой жидкости, объемном или массовом расходе. Однако данная информация будет адекватной лишь в том случае, если в сигнале ошибки регулирования будет отсутствовать квадратурная помеха. Наиболее близкое техническое решение по устранению данной составляющей содержится в описании компенсационного расходомера типа 4-РИМ разработки НИИ Теплоприбор (см. Кремлевский П.П. Расходомеры и счетчики количества. - Л.: Машиностроение, 1989, с.428, рис.251). Согласно ему сигнал ошибки подвергается высокочастотной модуляции, а затем повторной демодуляции. Этот процесс осуществляется за счет периодического инвертирования фазы сигнала ошибки с последующим детектированием и усреднением результата за промежуток времени не менее полупериода ЭДС первичного преобразователя. Это требование ограничивает быстродействие расходомера, а потому снижает точность измерения турбулентных потоков в электромагнитном поле низкой частоты.
Предлагаемое техническое решение направлено на уменьшение времени усреднения полезного сигнала в процессе высокочастотной модуляции-демодуляции и тем самым способствует улучшению динамических характеристик расходомера. Доя этого указанное инвертирование фазы ошибки регулирования предлагается осуществлять в моменты равенства двух сигналов, один из которых получают циклическим повторением процессов выпрямления, интегрирования и обнуления результата интегрирования в указанные моменты вспомогательного гармонического сигнала, изменяющегося синфазно с той же частотой, что и предполагаемый сигнал квадратурной помехи, а в качестве указанного выше второго сигнала принимают сигнал постоянного тока, изменением уровня которого устанавливают необходимую частоту модуляции, причем усреднение сигнала, подаваемого на исполнительно-регистрирующий орган, осуществляют на интервалах времени между двумя очередными инвертированиями фазы ошибки регулирования в одну и ту же сторону.
С учетом известной из курса автоматического регулирования пропорциональной связи между задающим сигналом (ЭДС первичного преобразователя) и сигналом ошибки регулирования указанные термины при дальнейшем рассмотрении электромагнитных процессов вполне допустимо отождествить.
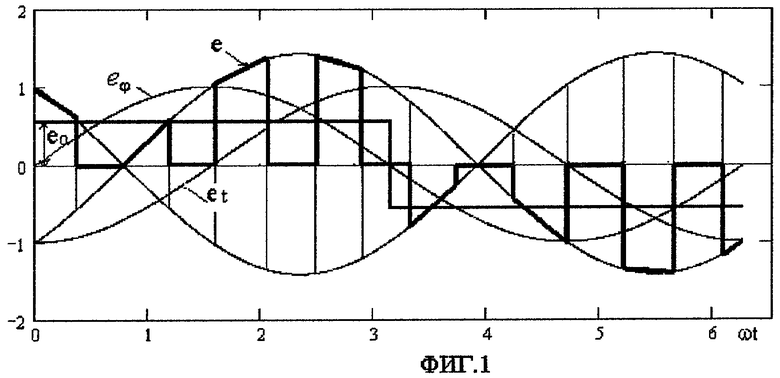
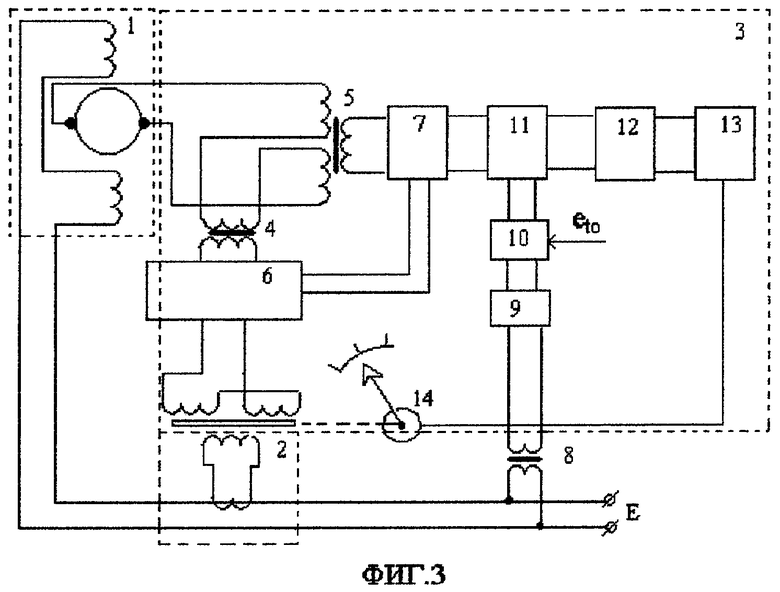
На фиг.1 приведены временные диаграммы ЭДС первичного преобразователя е, а также ее предполагаемой полезной eϕ и квадратурной et составляющих, иллюстрирующие известный способ компенсации последней. На фиг.2 приведены диаграммы тех же координат, которые иллюстрируют предлагаемое техническое решение. Реализация рассматриваемого способа возможна аппаратно или программно с помощью цифровых или аналоговых устройств, один из вариантов которого может быть выполнен по структуре фиг.3.
При рассмотрении воспользуемся известным законом электромагнитной индукции, согласно которому ЭДС на зажимах первичного преобразователя зависит от скорости изменения потокосцепления ψ=ψ(ϕ, t) в пространстве и времени

где eϕ - полезная составляющая в виде ЭДС движения;
et - помеха измерения в виде трансформаторной ЭДС.
Прибегая к комплексному изображению вектора потокосцепления ψ=ψmejϕsinωt, перепишем выражение для составляющих указанной ЭДС

откуда следует, что полезная составляющая еϕ совпадает с вектором потокосцепления во времени и отстает от него в пространсве на угол π/2, в то время как квадратурная помеха et в пространстве направлена противоположно вектору потокосцепления, а во времени - отстает от него на угол π/2. Основываясь на данных представлениях, можно изобразить временные диаграммы суммарной ЭДС на зажимах первичного преобразователя е=еϕ+еt и обеих ее составляющих в реально встречающемся на практике случае равенства этих составляющих по амплитуде (см. фиг.1, 2). Полагается, что несмотря на отсутствие первичной информации об амплитуде данных составляющих, их фазовое соотношение известно заранее, так как моменты перехода кривой eϕ через нулевое значение при малых токах в измерительных цепях задаются аналогичной кривой напряжения питания индуктора Е, а моменты перехода кривой eϕ через нуль сдвинуты на четверть периода. На этом предположении основывается известное решение (см. фиг.1), согласно которому ЭДС вначале подвергается высокочастотной модуляции путем периодического инвертирования фазы этого сигнала, а затем повторной демодуляции. С целью подавления квадратурной помехи демодуляцию осуществляют методом синхронного детектирования, причем в качестве синхронизирующего сигнала принимается полезная составляющая eϕ. В результате выходной сигнал демодулятора, указанный на фиг.1 жирной линией, в каждый момент будет иметь ту же полярность, что и полезная составляющая eϕ. Для полного устранения в составе указанного сигнала квадратурной помехи ее следует усреднить на интервале времени, равном полупериоду полезной составляющей Т/2, так как на этом интервале среднее значение помехи равно нулю. При этом условии присутствие квадратурной составляющей в усредненном сигнале ЭДС e0 полностью устраняется, что позволяет записать

В простейшем случае указанное усреднение осуществляется с помощью фильтра низких частот, большая постоянная времени которого в случае питания индуктора напряжением низкой частоты ведет к существенному ограничению быстродействия расходомера.
В отличие от известного способа инвертирование фазы ЭДС е предлагается осуществлять не в тактовые равно отстоящие друг от друга моменты времени, а в моменты достижения интегральных значений помехи некоторого постоянного уровня. Такое проведение модуляции позволяет исходить из предположения, что интегральное значение помехи на интервалах между переключениями имеет постоянное значение, что значительно упрощает дальнейшее разделение сигналов eϕ, et, сводя эту задачу к разделению постоянной и переменной составляющих ЭДС в течение двух соседних тактов модуляции. В условиях априорной информации о гармонической форме помехи ее роль при интегрировании может выполнять вспомогательный гармонический сигнал, изменяющийся синфазно с предполагаемой трансформаторной ЭДС. В представленной на фиг.3 схеме этот сигнал можно получить с вторичной обмотки вспомогательного трансформатора, установленного в цепях питания индуктора с последующим сдвигом получаемого сигнала на четверть периода. Рассматриваемая схема содержит первичный преобразователь расхода 1, согласующее устройство 2 и измерительный прибор 3. Измерительные электроды преобразователя, включенные последовательно с обмоткой компенсационного трансформатора 4, присоединены к первичной обмотке разделительного трансформатора 5. К другой обмотке компенсационного трансформатора 4 подключен блок фазовращателей 6, позволяющий создавать в указанной системе автоматического регулирования компенсационный сигнал. Со вторичной обмотки разделительного трансформатора снимается сигнал ошибки регулирования, который поступает на вход предварительного усилителя 7. Согласно предлагаемому решению в схему включены дополнительный трансформатор 8 и фазосдвигающая цепь 9 для получения сигнала, иммитирующего квадратурную помеху. Этот сигнал поступает на вход интегратора 10, где происходит его циклически повторяющееся с нуля накапливание с последующим сбросом интегратора в моменты достижения интегрального значения помехи некоторого заданного уровня еt0. Работу данного узла иллюстрируют полученные компьютерным моделированием диаграммы на фиг.2,в. Из диаграмм видно, что соответствующим изменением ею можно установить необходимую частоту повторения процессов на выходе интегратора в течение каждого полупериода входного сигнала. Моменты сброса интегратора задают моменты переключении в схеме модулятора 11, установленного в канале ошибки регулирования. Получаемый инвертированием фазы ЭДС е знакопеременный сигнал высокой частоты показан на фиг.2,а жирной линией. Далее этот сигнал поступает на вход демодулятора 12, где осуществляется его синхронное детектирование путем изменения полярности в моменты времени, совпадающие с моментами перехода через нулевое значение сигнала eϕ. Последующее усреднение полезной составляющей ЭДС происходит с помощью фильтра 13, уровни выходного сигнала которого показаны на диаграммах фиг.2,а в виде горизонтальных жирных линий. Полученный сигнал ошибки регулирования поступает на исполнительный двигатель 14, угол поворота которого, как отмечалось выше, используется в качестве выходной координаты расходомера.
С целью проверки эффективности предложенного решения были произведены необходимые расчеты, результаты которых отражены в таблице 1. Вычисления проведены на интервале, равном полупериоду квадратурной помехи T/2, и имели целью проверку реальной зависимости усредненных значений ЭДС первичного преобразователя от мгновенных значений ее указанных двух составляющих. Для этого определялось "среднее значение полезной ЭДС на i-ом такте"(см. 5-ый столбец табл.1), ступенчатая кривая которой на графике фиг.2,а показана пунктирной линией. Ввиду полного отсутствия в данном сигнале квадратурной составляющей, эта кривая представляет наиболее желательное изменение выходной координаты расходомера. Однако практическое получение данного сигнала предоставляется невозможным, так как для этого требуется априорная информация о величине квадратурной помехи на каждом такте. В этой связи в качестве выходной координаты расходомера предлагается принять "среднее значение ЭДС первичного преобразователя за два соседних такта" (см. 6-ой столбец табл.1). В отличие от вышеупомянутого получение данного сигнала возможно простым разделением с помощью малоинерционного фильтра полезной переменной и неполезной постоянной составляющих ЭДС преобразователя за каждые два соседних такта модуляции. Как отмечалось выше, на графике фиг.2,а эта кривая показана в виде горизонтальных жирных линий. Видно, что изменение указанного сигнала происходит синфазно с полезной составляющей еϕ, свидетельствуя о происходящей компенсации квадратурной помехи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНИК ПРЯМОГО ПРЕОБРАЗОВАНИЯ С КВАДРАТУРНО-ТРЕХФАЗНОЙ АРХИТЕКТУРОЙ, СПОСОБ ПРЯМОГО ПРЕОБРАЗОВАНИЯ СИГНАЛА ПОСРЕДСТВОМ УКАЗАННОГО ПРИЕМНИКА И СПОСОБ УПРАВЛЕНИЯ НАСТРОЙКОЙ УКАЗАННОГО ПРИЕМНИКА | 2013 |
|
RU2542939C1 |
| СПОСОБ СКАЛЯРНОГО УПРАВЛЕНИЯ МАТРИЧНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2009 |
|
RU2395891C1 |
| Способ выделения речевого сигнала на фоне помех и устройство для его осуществления | 1983 |
|
SU1156126A1 |
| ПРИЕМНИК ПРЯМОГО ПРЕОБРАЗОВАНИЯ С ЦИФРОВОЙ КОМПЕНСАЦИЕЙ | 1995 |
|
RU2146416C1 |
| Устройство для адаптивного приема сигналов | 1974 |
|
SU518011A1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2522854C1 |
| СПОСОБ ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ С ФИЛЬТРАЦИЕЙ | 2015 |
|
RU2592887C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ КРАТКОВРЕМЕННЫХ СИГНАЛОВ С МНОГОУРОВНЕВОЙ АБСОЛЮТНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ В УСЛОВИЯХ ЗАМИРАНИЙ | 2018 |
|
RU2684605C1 |
| ЦИФРОВЫЕ СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МГНОВЕННОЙ ФАЗЫ ПРИНЯТОЙ РЕАЛИЗАЦИИ ГАРМОНИЧЕСКОГО ИЛИ КВАЗИГАРМОНИЧЕСКОГО СИГНАЛА | 2010 |
|
RU2463701C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА С ЗАКРЫТЫМ КОНТУРОМ | 2016 |
|
RU2626019C1 |
Сигнал гармонической формы в виде ЭДС, снимаемой с измерительных электродов первичного преобразователя расхода, содержащей квадратурную помеху в виде сдвинутой по фазе на четверть периода трансформаторной ЭДС, сравнивают с изменяющимся в противофазе компенсирующим сигналом. Выделяют сигнал ошибки регулирования и подают его на регистрирующий орган, содержащий исполнительный электродвигатель, угол поворота которого является выходным сигналом расходомера. Сигнал ошибки регулирования подвергают высокочастотной модуляции путем циклического инвертирования фазы с последующей демодуляцией и усреднением за определенный промежуток времени. Для повышения быстродействия инвертирование фазы осуществляют в моменты времени, когда интегральное значение вспомогательного сигнала, имитирующего трансформаторную ЭДС, достигает постоянного заданного уровня. Усреднение получаемого в процессе демодуляции сигнала осуществляют на интервале времени между двумя соседними инвертированиями фазы в одну и ту же сторону. Изобретение улучшает динамические характеристики расходомера, что повышает точность измерения турбулентных потоков. 3 ил., 1 табл.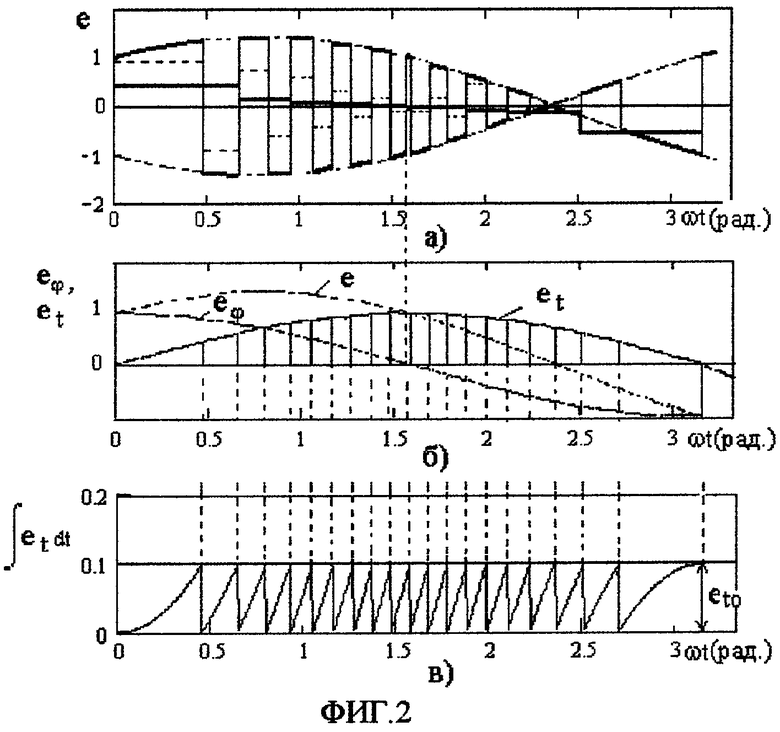
Способ компенсации квадратурной помехи в сигнале расходомера, предусматривающий получение электромагнитным методом на зажимах первичного преобразователя знакопеременной ЭДС гармонической формы, в общем случае содержащей в своем составе полезную составляющую, амплитуда которой пропорциональна скорости протекания измеряемой жидкости, и трансформаторную помеху той же частоты в виде квадратурной составляющей с фазовым сдвигом 90 эл. град., сравнение ЭДС преобразователя с изменяющимся в противофазе компенсирующим сигналом, получаемым на выходе блока компенсации, выделение сигнала ошибки регулирования в виде алгебраической разности ЭДС преобразователя и компенсирующего сигнала, а также процесс высокочастотной модуляции-демодуляции сигнала ошибки с последующей подачей на вход исполнительно-регистрирующего органа, содержащего в своем составе исполнительный электродвигатель, вращение которого приводит к изменению компенсирующего сигнала в нужную сторону с целью доведения ошибки регулирования до нулевого уровня с одновременным измерением и выдачей информации об угле поворота двигателя в виде выходного сигнала расходомера, причем указанный процесс модуляции-демодуляции в целях устранения трансформаторной квадратурной помехи осуществляют путем циклического высокочастотного инвертирования фазы сигнала ошибки с последующим его детектированием и усреднением за определенный промежуток времени, отличающийся тем, что указанное инвертирование фазы ошибки регулирования осуществляют в моменты равенства двух сигналов, один из которых получают циклическим повторением процессов выпрямления, интегрирования и обнуления результата интегрирования в указанные моменты времени вспомогательного гармонического сигнала, синфазного с сигналом квадратурной помехи, а в качестве второго принимают сигнал постоянного тока, изменением уровня которого устанавливают необходимую частоту модуляции, причем усреднение сигнала, подаваемого на исполнительный электродвигатель, осуществляют на интервалах времени между двумя очередными инвертированиями фазы ошибки регулирования в одну и ту же сторону.
| Кремлевский П.П | |||
| Расходомеры и счетчики количества | |||
| Справочник | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Л., "Машиностроение", 1989, с.с.428-431 | |||
| 1971 |
|
SU411302A1 | |
| Электромагнитный расходомер | 1973 |
|
SU462085A1 |
| Способ коррекции сигнала электромагнитного преобразователя расхода и устройство для его осуществления | 1985 |
|
SU1379631A1 |
| US 4227408 А, 14.10.1980. | |||

