Способ относится к преобразовательной, вычислительной технике и технике связи. Возможно его применение для преобразователей, коммуникационных систем и иных применениях, где используется фазовая автоподстройка частоты для перехода в синхронно вращающуюся систему координат по опорной фазе или осуществляется модуляция-демодуляция на основе опорного ортогонального сигнала.
Известно большое количество различных способов построения систем фазовой автоподстройки частоты, например /1/. В этом способе используется дискретное дифференциальное уравнение второго порядка, квадратурные преобразования с ПИ-регулятором. Недостатком данного способа является отсутствие фильтрации фазы, нет быстрого восстановления фазы исходного сигнала, зависимость настроек ПИ-регулятора от частоты исходного сигнала, синхронизация производится за 2 периода.
Известен также способ, при котором производится быстрая синхронизация при пропаже сетевого напряжения и его возобновлении /2/. В этом способе используется предположение об отсутствии изменения фазы генерируемого напряжения ввиду достаточно большой инерционности изменения частоты, при этом используется резонансное звено, осуществляющее свободные колебания при пропаже напряжения, однако при наличии генераторов с быстро изменяющейся фазой данный способ будет недостаточно быстродействующим.
Известен способ, при котором производится подстройка фазы с использованием управляемого квадратурного фильтра для синхронизации, однако необходимо использование ортогонального входного сигнала, отсутствует фильтрация и управление по постоянным времени компенсатора, к которому предъявляются требования к оценке частоты на основе неуправляемых динамических звеньев /3/.
Известен способ, при котором производится оценка частоты входного ортогонального сигнала с использованием двойного интегрирования, фильтрации и устройства подавления гармоник /4/. Данный способ обладает тем недостатком, что необходимо наличие ортогонального сигнала, фильтрация осуществляется для выбранных гармонических составляющих, присутствует наличие сложного алгоритма выделения гармоник на основе гармонических осцилляторов, требуется настройка нескольких коэффициентов.
Наиболее близким аналогом к предлагаемому способу является способ построения системы ФАПЧ на основе /5/. В этом способе-прототипе используется преобразование Кларке от трехфазного исходного сигнала, приводя его к ортогональному, затем по этому сигналу восстанавливается квадрат фазы, после чего находится квадратный корень и восстанавливается фаза исходного сигнала, затем вычисляются тригонометрические функции с использованием этой фазы по одиночной и двойной частоте, на основе которых формируются коэффициенты фильтра второй гармоники и производится генерация квадратурного сигнала, после чего производится формирование опорного сигнала, который может использоваться для синхронизации. Дополнительно в этом способе присутствует возможность разделения исходного трехфазного сигнала на симметричные компоненты в виде прямой, обратной и нулевой последовательностей, основное назначение прототипа - выделение обобщенного вектора от исходного трехфазного сигнала.
Недостаток этого способа заключается в том, что в нем отсутствует возможность обеспечения формирования мгновенной фазы из однофазного сигнала с высоким быстродействием при заданных начальных условиях. Также отсутствует фильтрация помех синхронизируемого сигнала. Для способа-прототипа необходимо наличие трехфазного исходного сигнала. Отсутствует автоматическое поддержание заданных коэффициентов дискретных динамических элементов, что подразумевает их начальный подбор или расчет.
Задача изобретения - создание системы фазовой автоподстройки частоты по одно- и многофазному исходному сигналу, формирования опорной фазы и ее фильтрации с высоким быстродействием с использованием средств цифровой обработки сигналов, а также отсутствием какой-либо настройки и подбора коэффициентов в широком диапазоне частот синхронизации.
Предлагаемый способ фазовой автоподстройки частоты с исходным сигналом, отфильтрованным фазовым фильтром, перемноженным полученным значением с исходным сигналом, отфильтрованным полосно-заграждающим фильтром, формированием ошибки управления по постоянной составляющей результата перемножения с нулевым сигналом задания и интегрированием ошибки с полученным значением синхронизированной частоты, на основе сформированного значения сигнала синхронизированной частоты вычисляются коэффициенты дискретных фильтров, затем вычисленные значения коэффициентов поступают в качестве параметров для фазовой фильтрации, полосно-заграждающей фильтрации и фильтрации низкой частоты, при этом осуществляется вычисление опорной фазы с нахождением четырехквадрантного арктангенса от исходного сигнала и сигнала после фазовой фильтрации, вместе с этим, синхронизированная частота интегрируется, при этом формируется сигнал восстановленной фазы, затем производится вычисление разности между восстановленной фазой и опорной, полученная разность фаз фильтруется фильтром низких частот с получением фильтрованной разницы фаз, после чего производится вычисление разницы между восстановленной фазой и фильтрованной разницей фаз, тем самым, получается требуемая синхронизированная фаза.
При поиске аналогичных запатентованных устройств, не выявлено структурных решений с эквивалентными заявляемыми способу фазовой автоподстройки частоты с фильтрацией признаками. Таким образом, предлагаемый способ соответствует критерию научной новизны.
Принципиальным отличием предлагаемой системы фазовой автоподстройки частоты является наличие элементов в виде цифровых фильтров первого и второго порядков с переменными коэффициентами, вычисляемых по заданным формулам и позволяющих производить быстрое формирование опорного ортогонального сигнала, выделение частоты и фильтрацию опорной фазы на основе входного сигнала с синусоидальной основной составляющей и помехами. Применение цифровых фильтров с переменными коэффициентами позволяет обеспечить высокую скорость синхронизации при быстром изменении частоты входного сигнала. Значение синхронизирующей частоты может достигать до четверти частоты дискретизации. Дополнительно способ содержит дискретный интегратор, который используется в качестве регулятора с переменным коэффициентом и служит для сведения к нулю постоянной составляющей на выходе блока умножения путем управления разностью фаз между исходным сигналом и прошедшим через фазовый фильтр. Система ФАПЧ имеет переключение сигналов, реализуемое как условные переходы, используемые для реализации цифрового фильтра низкой частоты первого порядка, уменьшающего помехи на пилообразном сигнале фазы с учетом ее перехода через граничные значения, соответствующие углам ±180 эл. град. Применение фильтрации позволяет существенно уменьшить помеху, при этом не происходит значительного сдвига мгновенного значения восстановленной фазы относительно синусоидальной составляющей исходного сигнала.
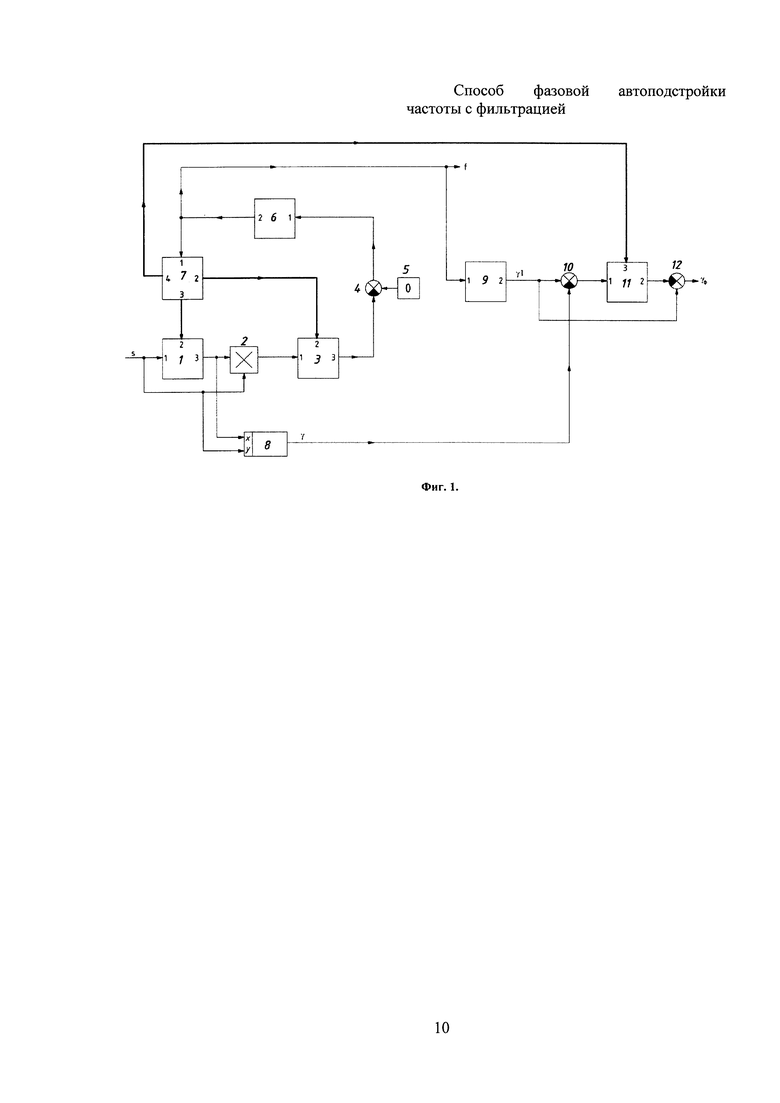
На фиг. 1 изображена общая схема предлагаемого способа, где присутствуют следующие блоки: 1 - цифровой фильтр, реализующий функцию фазовой фильтрации, 2 - блок умножения двух сигналов, 3 - цифровой фильтр, реализующий функцию полосно-заграждающего фильтра, 4 - блок формирования сигнала ошибки в виде разницы значений сигналов, 5 - блок нулевого сигнала задания на постоянную составляющую сигнала ошибки, 6 - блок цифрового интегратора с автоматически регулируемым коэффициентом усиления, 7 - блок вычисления коэффициентов цифровых фильтров, 8 - блок вычисления четырехквадрантного арктангенса двух аргументов мгновенной опорной фазы, 9 - дискретный интегратор, восстанавливающий фазу синхронизируемой частоты, 10 - блок формирования разницы между восстановленной фазой и фазой между сигналами на входе и выходе фазового фильтра, 11 - цифровой фильтр, формирующий сигнал фильтрованной разницы фаз, 12 - блок суммирования, формирующий требуемую фильтрованную фазу.
Имеется блок фазового фильтра 1, реализующий функцию поворота фазы исходного сигнала «s» на синхронизируемой частоте на -90 эл. град. Фильтр представляет собой БИХ-фильтр первого порядка с коэффициентами в виде соответствующих численных значений «b0», «b1» и «a
1», изменяющихся во времени, исходный сигнал поступает на вход 1 блока 1, вычисленные значения коэффициентов поступают на порт входной шины 2 блока 1, выходной сигнал формируется на основе цифрового фильтра вида  и поступает на выходной порт 3 блока 1.
и поступает на выходной порт 3 блока 1.
Блок арифметического умножения 2 реализует умножение исходного сигнала на сигнал, получаемый с выхода фазового фильтра 1. При этом на выходе получается постоянная составляющая, зависящая от фазы между входным и прошедшим через фазовый фильтр сигналом, а также переменная составляющая с удвоенной частотой, при этом постоянная составляющая равна нулю, если сигнал с выхода фазового фильтра сдвинут на 90 эл. град. по отношению к исходному сигналу на синхронизируемой частоте.
Цифровой фильтр 3, который реализует функцию полосно-заграждающей фильтрации с центральной частотой, равной удвоенной синхронизируемой частоте. Удвоенная частота содержится в сигнале после прохождения блока арифметического умножения 2, сигнал с которого поступает на блок 3. Фильтр 3 с заданными значениями коэффициентов «b0», «b1», «b2», «a
1» и «а
2», зависящих от времени, осуществляет подавление второй гармоники и выделение постоянной составляющей. Коэффициенты поступают в виде значений на входной порт 2. Фильтр 3 реализуется как дискретный фильтр вида  , исходный сигнал поступает на входной порт 1 и формируется на выходном порте 3 блока 3.
, исходный сигнал поступает на входной порт 1 и формируется на выходном порте 3 блока 3.
Имеется блок 4 получения сигнала ошибки как разницу сигнала с блока умножения 2 с нулевым значением 5. Тем самым, формируется ошибка регулирования по постоянной составляющей, пропорциональной синусу отклонения разницы фаз на входе и выходе фазового фильтра на -90 эл. Град. для интегратора 5. При нулевой ошибке регулирования разность фаз на выходе и выходе фазового фильтра 1 составляет -90 эл. град.
Имеется блок интегратора 6, осуществляющего интегрирование сигнала ошибки после 4. Входной сигнал «х» поступает на порт 1 интегратора 6, выходной «y» формируется на порте 2. Интегратор реализован в виде передаточной функции  . Коэффициент ki(y) зависит от выходного значения интегратора и вычисляется как
. Коэффициент ki(y) зависит от выходного значения интегратора и вычисляется как  , где ƒd - значение частоты дискретизации в Гц, «y» - сигнал с выходного порта 2 интегратора 6, Ki - неотрицательная постоянная, определяющая быстродействие и устойчивость и имеющая значение по умолчанию Ki=2, значение m для простоты расчетов выбирается целым числом 1 или 2, при этом использование квадратичной зависимости позволяет реализовать более высокую скорость синхронизации, также возможно применение заданной постоянной времени интегрирования ki(y)=Ki=const, в этом случае скорость синхронизации слабо зависит от синхронизируемой частоты и параметр Ki подлежит начальному выбору. Интегратор имеет задание начальных условий в первый момент времени в виде значения частоты ƒ0, выбираемой произвольно, при этом имеется возможность задать ее значение до половины частоты Найквиста и, рациональней, задать близкой к предполагаемой частоте синхронизации.
, где ƒd - значение частоты дискретизации в Гц, «y» - сигнал с выходного порта 2 интегратора 6, Ki - неотрицательная постоянная, определяющая быстродействие и устойчивость и имеющая значение по умолчанию Ki=2, значение m для простоты расчетов выбирается целым числом 1 или 2, при этом использование квадратичной зависимости позволяет реализовать более высокую скорость синхронизации, также возможно применение заданной постоянной времени интегрирования ki(y)=Ki=const, в этом случае скорость синхронизации слабо зависит от синхронизируемой частоты и параметр Ki подлежит начальному выбору. Интегратор имеет задание начальных условий в первый момент времени в виде значения частоты ƒ0, выбираемой произвольно, при этом имеется возможность задать ее значение до половины частоты Найквиста и, рациональней, задать близкой к предполагаемой частоте синхронизации.
Имеется блок вычисления коэффициентов цифровых фильтров 7, осуществляющий вычисление коэффициентов «b0», «b1», «b2», «a
1» и «a
2» для второго порядка или «b0», «b1» и «a
1» для первого порядка в цифровых фильтрах блоков 1, 3 и 9. Коэффициенты подбираются таким образом, чтобы блок содержал порт входного сигнала 1, представляющий собой выход интегратора 6. Входной сигнал с порта 1 есть функция частоты в зависимости от отсчетов «f» с постоянным шагом во времени. Далее производятся вычисления по формулам 
 , где f(t) - синхронизируемая частота, затем эти сигналы используются для вычисления коэффициентов по выражениям:
, где f(t) - синхронизируемая частота, затем эти сигналы используются для вычисления коэффициентов по выражениям:  b1=1 для фазового фильтра;
b1=1 для фазового фильтра;
 - для фильтра низкой частоты;
- для фильтра низкой частоты;
для полосно-заградительного фильтра коэффициенты определяются как C2=2·C2-1,  a
1=b1= -2·b0·C2, a
2=2·b0-1.
a
1=b1= -2·b0·C2, a
2=2·b0-1.
Производится рациональное вычисление коэффициентов с минимизацией операций деления и вычисления тригонометрических функций. Тригонометрические функции двойного аргумента вычисляются по формулам приведения, тем самым, достаточно определения значения синуса и косинуса для основной частоты.
Функция вычисления арктангенса двойного аргумента (четырехквадрантного арктангенса) 8 формирует сигнал опорной нефильтрованной фазы «γ» по отсчетам входного синхронизируемого сигнала «s» и этому же сигналу, прошедшему через фазовый фильтр 1.
Имеется дискретный интегратор 9 с входным портом 1, на который поступают отсчеты синхронизируемой частоты «f» от блока 6 и выходным портом 2, на котором формируется выходной сигнал восстановленной фазы «γ1». Интегратор реализует базовую передаточную функцию  . Интегратор имеет сброс на ненулевые начальные условия при спаде выходного сигнала до выполнения неравенства γ1≤-2·π, при этом устанавливается новое выходное значение γ1=2·π, причем установка производится по переходу неравенства от ложного значения к истинному (передний фронт).
. Интегратор имеет сброс на ненулевые начальные условия при спаде выходного сигнала до выполнения неравенства γ1≤-2·π, при этом устанавливается новое выходное значение γ1=2·π, причем установка производится по переходу неравенства от ложного значения к истинному (передний фронт).
Имеется блок разности 10, формирующий разность между восстановленной по частоте фазой γ1 и абсолютной фазой γ. Разность фаз поступает на входной порт 1 фильтра низких частот 11.
Имеется фильтр низких частот 11 с коррекцией перехода фазы. Разность фаз поступает на входной порт 1 от блока разности 10, коэффициенты цифрового фильтра поступают на входной порт 3 от блока формирования коэффициентов 6, результирующий сигнал отфильтрованной разницы фаз формируется на выходном порте 2. Фильтр низких частот реализуется на основе цифрового фильтра  , где корректировочный коэффициент «с» является зависящим от задержанных на один отсчет значений «x» и «y». Определяется разница между входным отсчетом xn и его задержанным значением на один такт xn-1 значением как dx=xn-xn-1, затем определяется условие: если dx≥π, то с=2·π, также если dx≤-π, то с= -2·π, иначе с=0.
, где корректировочный коэффициент «с» является зависящим от задержанных на один отсчет значений «x» и «y». Определяется разница между входным отсчетом xn и его задержанным значением на один такт xn-1 значением как dx=xn-xn-1, затем определяется условие: если dx≥π, то с=2·π, также если dx≤-π, то с= -2·π, иначе с=0.
Имеется блок разности 12, вычитающий отфильтрованную разницу фаз фильтром низких частот 11 от восстановленной фазы после интегратора 9. На выходе блока разности 12 формируется требуемый сигнал синхронизированной фазы γф.
Система фазовой автоподстройки частоты с фильтрацией работает следующим образом.
Исходный синхронизирующий сигнал в виде отсчетов поступает на вход фазового фильтра 1, после чего производится умножение исходного и фильтрованного сигналов блоком умножения 2, получившийся сигнал затем фильтруется полосно-заграждающим фильтром 3, затем формируется сигнал ошибки блоком вычитания 4 между сигналом нулевого сигнала задания 5 с сигналов с выхода полосно-заграждающего фильтра 2 и интегрируется дискретным интегратором 6, после чего сформированный сигнал синхронизируемой частоты поступает на блок формирования коэффициентов дискретных фильтров 7, вычисленные коэффициенты поступают на фильтры 1, 3 и 9, исходный сигнал и сигнал с фазового фильтра 1 поступают на блок вычисления арктангенса 8, с выхода которого формируется опорная фаза, сигнал синхронизированной частоты с выхода интегратора 6 интегрируется блоком 9, с выхода которого получается восстановленная фаза, затем формируется разность между восстановленной фазой и опорной фазой блоком 10, которая фильтруется фильтром низкой частоты 11, с выхода которого формируется фильтрованная разница фаз, затем берется разность блоком 12 между восстановленной и фильтрованной разницей фаз и получается фильтрованная фаза. Результатом применения способа являются синхронизированная частота и фильтрованная фаза от исходного сигнала синхронизации.
Применение способа позволяет осуществить фазовую автоподстройку с заданным входным сигналом, содержащим основную гармонику и помехи. Входной сигнал поступает на вход системы фазовой автоподстройки, при этом формируется опорная мгновенная фаза, вычисляемая из исходного сигнала и ему ортогональным по синхронизируемой частоте, если синхронизируемая частота близка к основной частоте исходного сигнала, то возможно получение опорной фазы с достаточным качеством для обеспечения процессов регулирования или демодуляции за время, составляющее четверти периода синхронизируемой частоты, если используется фильтрация - то в течение полупериода. Установившийся режим для синхронизируемой частоты и практически точное соответствие синхронизованной фазы фазе основной гармоники исходного сигнала возникает уже спустя период от частоты исходного сигнала, тем самым, обеспечивая улучшение быстродействия и его качества, включая возможность синхронизации от однофазного сигнала по сравнению с прототипом.
Источники информации
1. Патент Китая CN 103825302.
2. Патент Китая CN 103825300.
3. Патент США 8816729.
4. Патент США 8751177;
5. Патент США 8532230.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХЕМА СИНХРОНИЗАЦИИ, СПОСОБ СИНХРОНИЗАЦИИ И СИСТЕМА ПРИЕМА | 2011 |
|
RU2506626C2 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| СПОСОБ КОМПЕНСАЦИИ СКАЧКОВ ОПОРНОГО СИГНАЛА ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ | 2006 |
|
RU2321167C2 |
| СПОСОБ ДЕМОДУЛЯЦИИ КРАТКОВРЕМЕННЫХ СИГНАЛОВ С МНОГОУРОВНЕВОЙ АБСОЛЮТНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ В УСЛОВИЯХ ЗАМИРАНИЙ | 2018 |
|
RU2684605C1 |
| Способ для ускоренной синхронизации систем фазовой автоподстройки в электрических сетях и устройство для его реализации | 2020 |
|
RU2767510C1 |
| СПОСОБ И УСТРОЙСТВО ДЕМОДУЛЯЦИИ СИГНАЛОВ ГАЛИЛЕЯ С ПЕРЕМЕННОЙ БИНАРНОЙ СМЕЩЕННОЙ НЕСУЩЕЙ (ALTBOC) | 2004 |
|
RU2349049C2 |
| МНОГОКАНАЛЬНЫЙ ПЕРЕПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ПРИЕМНЫЙ ТРАКТ | 2004 |
|
RU2289202C2 |
| СИСТЕМА И СПОСОБ УСТРАНЕНИЯ ОШИБКИ СИНХРОНИЗАЦИИ СИМВОЛА И ОШИБКИ ПО ЧАСТОТЕ НЕСУЩЕЙ В СИСТЕМЕ ЦИФРОВОГО РАДИОВЕЩАНИЯ ОЧУ | 2000 |
|
RU2232479C2 |
| Способ контроля изменения состава воздушной среды | 2020 |
|
RU2747263C1 |
| СИНТЕЗАТОР ЧАСТОТ С ЧАСТОТНОЙ ИЛИ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2004 |
|
RU2280945C1 |
Способ фазовой автоподстройки позволяет осуществлять синхронизацию от однофазного исходного сигнала с помехами. Технический результат заключается в улучшении практического быстродействия синхронизации до одного-двух периодов сигнала синхронизируемой частоты, фильтрации помех в формируемых сигналах синхронизированной фазы и частоты. В состав системы входят блоки фазовой фильтрации первого порядка, полосно-заграждающего фильтра второго порядка, фильтрации низкой частоты первого порядка, блока интегрирования, блока умножения, блока вычисления коэффициентов цифровых фильтров, четырехквадрантного арктангенса. Применение дискретных методов для физической реализации способа с привлечением микропроцессорных средств позволяет осуществить операции сравнения и вычисления нелинейных функций с приемлемыми точностью и вычислительными ресурсами. Фильтры реализуются с переменными коэффициентами, имеют первый и второй порядок. Благодаря относительно небольшой чувствительности фазового фильтра к изменению частоты возможно быстрое выделение опорной фазы из исходного сигнала. Применение дискретного интегратора с обратной связью по коэффициенту интегрирования позволяет осуществлять быстрый выход сигнала синхронизированной частоты на установившийся режим. Применение дискретного фильтра с изменяемыми коэффициентами и учета перехода фазы через граничные значения позволяет эффективно осуществлять фильтрацию синхронизированной фазы без ее смещения относительно фазы основной гармоники исходного сигнала. Данный способ позволяет строить на его основе системы управления по гармоническим составляющим в одно- и многофазных системах и симметричным составляющим в многофазных системах. Основное применение данного способа в управлении преобразовательной техникой, также возможно его использование для быстрой синхронизации в средствах связи и иных приложениях с требованиями высокого быстродействия по настройке на основную частоту и выделения опорной фазы. 1 ил.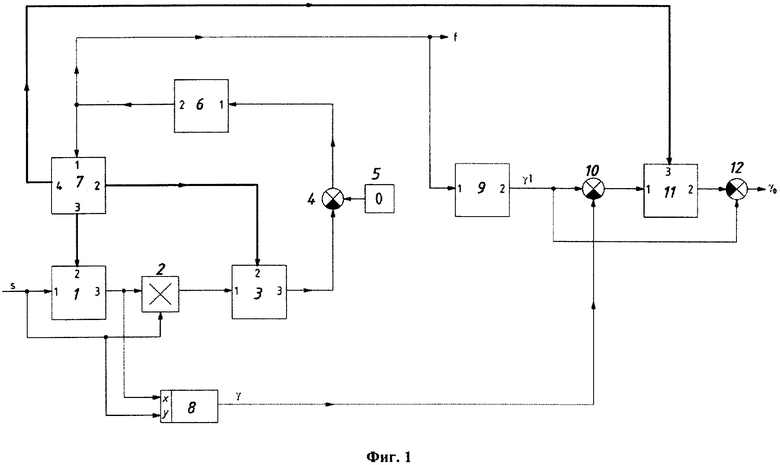
Способ фазовой автоподстройки частоты с фильтрацией, включающий полосно-заграждающую фильтрацию, интегрирование, вычисление коэффициентов цифровых фильтров, отличающийся тем, что исходный сигнал фильтруется фазовым фильтром, затем полученный сигнал перемножается с исходным сигналом, после чего фильтруется полосно-заграждающим фильтром, затем формируется сигнал ошибки между нулевым сигналом задания и сигналом с полосно-заграждающего фильтра, затем ошибка регулирования интегрируется, на основе сформированного значения сигнала синхронизированной частоты вычисляются коэффициенты дискретных фильтров, затем вычисленные значения коэффициентов поступают в качестве параметров фильтрации для фазового, полосно-заграждающего фильтров и фильтра низкой частоты, при этом осуществляется вычисление опорной фазы четырехквадрантным арктангенсом от исходного сигнала и сигнала с фазового фильтра, после чего синхронизированная частота интегрируется, при этом формируется сигнал восстановленной фазы, затем производится вычисление разности между восстановленной фазой и опорной, полученная разность фаз фильтруется фильтром низких частот с получением фильтрованной разницы фаз, после чего производится вычисление разницы между восстановленной фазой и фильтрованной разницей фаз для получения требуемой синхронизированной фазы
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |

