Изобретение относится к радиотехнике и вычислительной технике и предназначено для использования в комплексах автоматизированных систем управления сетями многоканальной радиосвязи (СМКРС) и в средствах обработки и передачи данных локальных вычислительных сетей (ЛВС).
Известен вероятностный автомат по авт. св. СССР №1045232, G 06 F 15/36, 1983, бюл. 36, содержащий генератор тактовых импульсов, элементы И и ИЛИ, регистр сдвига, блоки памяти и задания времени.
Однако данный вероятностный автомат имеет узкую область применения, так как моделирует неуправляемые полумарковские цепи без учета внешних управляющих воздействий, что не позволяет применять его для анализа реально протекающих процессов в сетях многоканальной радиосвязи и ЛВС, поскольку эти процессы в большинстве своем управляемы.
Известен вероятностный автомат (патент РФ №2099781, G 06 F 17/00, 1997, бюл. 35), содержащий блок элементов И, блок памяти, блок задания времени, элемент ЗАПРЕТ, элемент ИЛИ, датчик случайной последовательности, блок формирования корректирующей последовательности, блок коррекции, блок формирования значений матрицы, блок формирования значений индикаторов, блок управления, дешифратор и генератор тактовых импульсов.
Однако данный вероятностный автомат также имеет ограниченную область применения, так как моделирует управляемые полумарковские процессы с раз и навсегда заданными пороговыми значениями (границами) состояний - не способен динамически корректировать границы состояний моделируемого процесса, что не позволяет применять его для динамического анализа реальных сетей многоканальной радиосвязи и ЛВС, поскольку большое количество процессов, протекающих в управляемых сетях многоканальной радиосвязи и ЛВС могут в динамике функционирования изменять пороговые значения своих состояний под влиянием управляющих воздействий или внешних факторов.
Наиболее близким по технической сущности к заявляемому устройству (прототипом) является вероятностный автомат (см. патент РФ №2139569, G 06 F 17/18, 1999, бюл. 28), содержащий датчик случайной последовательности, блок формирования нецелочисленных значений индикаторов, блок коррекции, блок формирования значений матрицы, блок управления, блок пороговых устройств, блок формирования значений индикаторов, блок элементов И, блок памяти, блок задания времени, дешифратор, элемент ЗАПРЕТ, элемент ИЛИ и генератор тактовых импульсов, выход которого соединен с прямым входом элемента ЗАПРЕТ и тактовым входом блока задания времени, m≥3 выходов которого являются соответственно m выходами автомата и подключены к соответствующим m входам элемента ИЛИ, выход которого соединен с инверсным входом элемента ЗАПРЕТ, выход которого подключен к тактовым входам блока элементов И, блока формирования значений индикаторов и блока управления, управляющий вход которого является управляющим входом автомата, а управляющий выход подключен к входам дешифратора и блока формирования значений матрицы, m выходов блока формирования значений индикаторов соединены с соответствующими m входами блока элементов И, m выходов которого подключены к соответствующим m входам блока памяти, m выходов которого соединены с соответствующими m входами блока задания времени, управляющий вход которого подключен к выходу дешифратора, m управляющих входов блока формирования нецелочисленных значений индикаторов соединены с соответствующими m выходами блока формирования значений матрицы, m интерполяционных входов блока формирования нецелочисленных значений индикаторов подключены к соответствующим m выходам блока памяти, m выходов блока формирования нецелочисленных значений индикаторов соединены с соответствующими m вспомогательными входами блока формирования значений индикаторов и с m информационными входами блока коррекции, стартовый вход которого подключен к выходу датчика случайной последовательности, выход блока коррекции соединен с входом блока пороговых устройств, m выходов которого подключены к соответствующим m информационным входам блока формирования значений индикаторов, m-1 пороговых выходов блока управления подключены к соответствующим m-1 пороговым входам блока коррекции и блока пороговых устройств.
Достоинством прототипа является его способность моделировать управляемые полумарковские цепи с динамической коррекцией пороговых значений (границ) состояний случайных процессов, протекающих в управляемых СМКРС и ЛВС.
Однако прототип имеет недостаток - относительно низкую достоверность моделирования параметров реального процесса функционирования сетей многоканальной радиосвязи и ЛВС в условиях недостоверности (недостаточности, неполноты) исходных данных, т.е. относительно низкую достоверность моделирования состояний СМКРС и ЛВС с недостоверно (недостаточно, неполно) заданными параметрами. Это связано с тем, что моделирование осуществляется на основе вводимых количественных значений исходных данных (элементов матриц переходных вероятностей, пороговых значений (границ) состояний), что делает малоэффективным применение прототипа для динамического многокритериального анализа реальных сетей многоканальной радиосвязи и ЛВС. Данный вероятностный автомат позволяет моделировать управляемые полумарковские цепи с динамической коррекцией пороговых значений (границ) состояний лишь тех случайных процессов, исходные данные для которых заданы количественно, в то время как исходные данные для моделирования большого количества процессов, реально протекающих в управляемых СМКРС и ЛВС, могут быть заданы лишь качественно (на качественном уровне - недостоверно, недостаточно, неполно), опираясь на мнения большого количества экспертов.
Целью предлагаемого изобретения является создание вероятностного автомата, обеспечивающего повышение достоверности моделирования параметров реального процесса функционирования сетей многоканальной радиосвязи и локальных вычислительных сетей в условиях недостоверности (недостаточности, неполноты) исходных данных, вероятностного автомата, способного с высокой достоверностью моделировать управляемые полумарковские цепи, формируемые с учетом как количественно, так и качественно (недостоверно, неполно) заданных исходных данных, описывающих пороговые значения (границы) и вероятностно-временной механизм (элементы матриц переходных вероятностей) смены состояний моделируемых случайных процессов.
Указанная цель достигается тем, что в известный вероятностный автомат, содержащий датчик случайной последовательности, блок формирования нецелочисленных значений индикаторов, блок коррекции, блок формирования значений матрицы, блок управления, блок пороговых устройств, блок формирования значений индикаторов, блок элементов И, блок памяти, блок задания времени, дешифратор, элемент ЗАПРЕТ, элемент ИЛИ и генератор тактовых импульсов, выход которого соединен с прямым входом элемента ЗАПРЕТ и тактовым входом блока задания времени, m≥3 выходов которого являются соответствующими m выходами автомата и подключены к соответствующим m входам элемента ИЛИ, выход которого соединен с инверсным входом элемента ЗАПРЕТ, выход которого подключен к тактовым входам блока элементов И, блока формирования значений индикаторов и блока управления, управляющий вход которого является управляющим входом автомата, m выходов блока формирования значений индикаторов соединены с соответствующими m входами блока элементов И, m выходов которого подключены к соответствующим m входам блока памяти, m выходов которого соединены с соответствующими m интерполяционными входами блока формирования нецелочисленных значений индикаторов и с m входами блока задания времени, управляющий вход которого подключен к выходу дешифратора, m управляющих входов блока формирования нецелочисленных значений индикаторов соединены с соответствующими m выходами блока формирования значений матрицы, m выходов блока формирования нецелочисленных значений индикаторов соединены с соответствующими m вспомогательными входами блока формирования значений индикаторов и с m информационными входами блока коррекции, стартовый вход которого подключен к выходу датчика случайной последовательности, выход блока коррекции соединен с входом блока пороговых устройств, m выходов которого подключены к соответствующим m информационным входам блока формирования значений индикаторов, дополнительно введен блок повышения достоверности. Управляющий вход блока повышения достоверности подключен к управляющему выходу блока управления, m-1 пороговых выходов которого соединены с соответствующими m-1 пороговыми входами блока повышения достоверности, управляющий выход которого подключен к входам дешифратора и блока формирования значений матрицы, m-1 пороговые выходы блока повышения достоверности подключены к соответствующим m-1 пороговым входам блока коррекции и блока пороговых устройств.
Блок повышения достоверности состоит из контроллера исходных данных и преобразователя недостоверных данных, m-1 недостоверные пороговые входы которого соединены с соответствующими m-1 недостоверными пороговыми выходами контроллера исходных данных, недостоверный управляющий выход которого подключен к недостоверному управляющему входу преобразователя недостоверных данных. Управляющий вход контроллера исходных данных является управляющим входом блока, управляющий выход контроллера исходных данных соединен с управляющим выходом преобразователя недостоверных данных и является управляющим выходом блока, m-1 пороговые входы контроллера исходных данных являются соответствующими m-1 пороговыми входами блока, m-1 пороговые выходы преобразователя недостоверных данных соединены с соответствующими m-1 достоверными пороговыми выходами контроллера исходных данных и являются соответствующими m-1 пороговыми выходами блока повышения достоверности.
Блок формирования значений матрицы состоит из запоминающего элемента и счетчика. Вход счетчика является входом блока, выход счетчика соединен с входом запоминающего элемента, m выходов которого являются соответствующими m выходами блока.
Блок управления состоит из управляющего оперативного запоминающего элемента (ОЗЭ), порогового ОЗЭ и счетчика. Первый и второй выходы счетчика подключены к тактовым входам соответственно управляющего и порогового ОЗЭ, первый и второй входы счетчика соединены со сбрасывающими выходами соответственно управляющего и порогового ОЗЭ, третий вход счетчика является тактовым входом блока, информационные входы управляющего и порогового ОЗЭ объединены и являются управляющим входом блока, выход управляющего ОЗЭ является управляющим выходом блока, m-1 выходы порогового ОЗЭ являются соответствующими m-1 пороговыми выходами блока.
Благодаря новой совокупности существенных признаков за счет введения блока повышения достоверности, обеспечивающего последовательное сравнение (по количеству разрядов) поступающих в двоичном коде исходных данных, принятие решения об их математической природе и преобразование исходных данных, в заявленном вероятностном автомате достигается возможность предварительного анализа и трансформирования исходных данных, заданных недостоверно (неполно) к виду, пригодному для осуществления процедуры параметрического моделирования, что обуславливает повышение достоверности моделирования процесса смены состояний параметров сетей многоканальной радиосвязи и локальных вычислительных сетей в условиях, присущих реальному процессу их функционирования - в условиях недостоверности (недостаточности, неполноты) исходных данных.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного устройства условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного объекта, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Заявленное устройство поясняется чертежами, на которых представлены:
на фиг.1 - структурная схема управляемого вероятностного автомата;
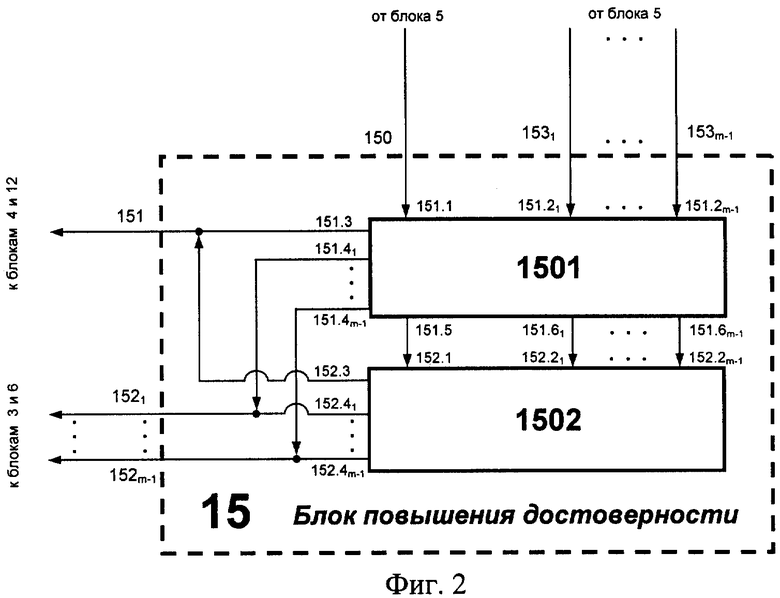
на фиг.2 - структурная схема блока повышения достоверности;
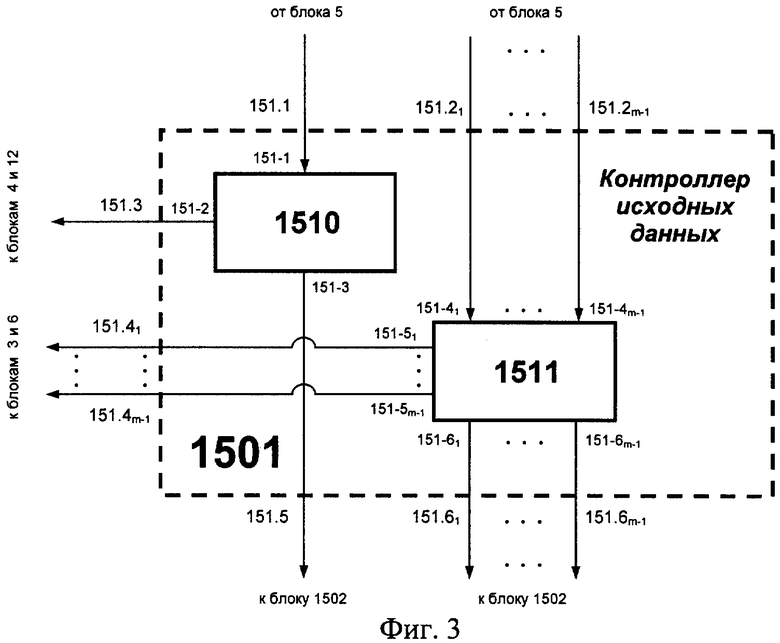
на фиг.3 - структурная схема контроллера исходных данных;
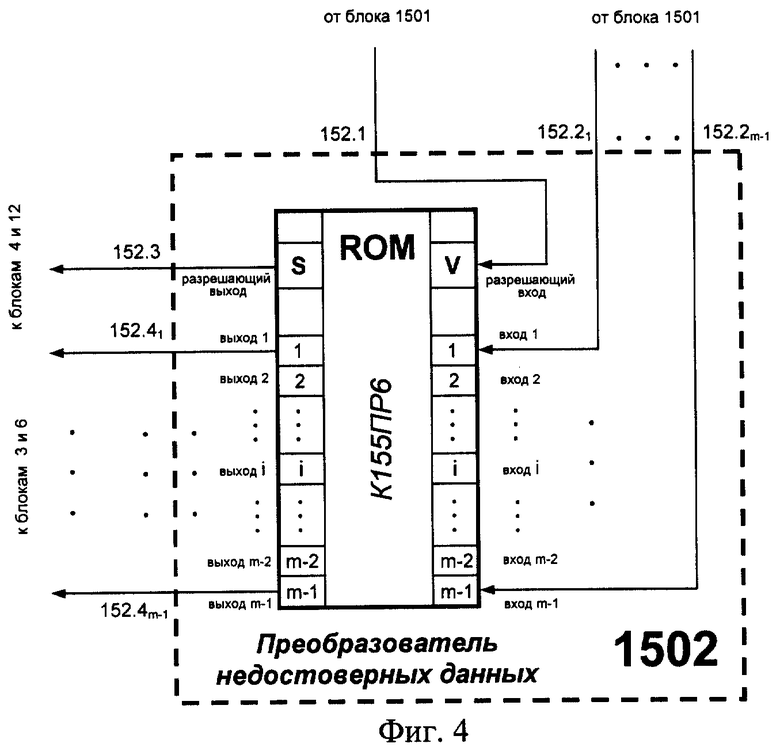
на фиг.4 - структурная схема преобразователя недостоверных данных;
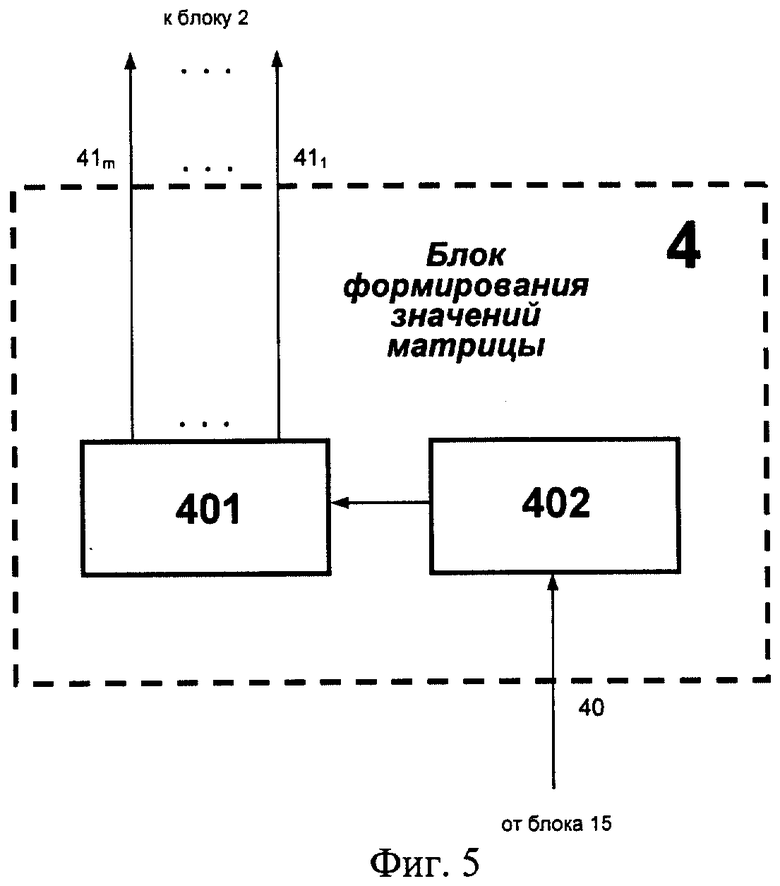
на фиг.5 - структурная схема блока формирования значений матрицы;
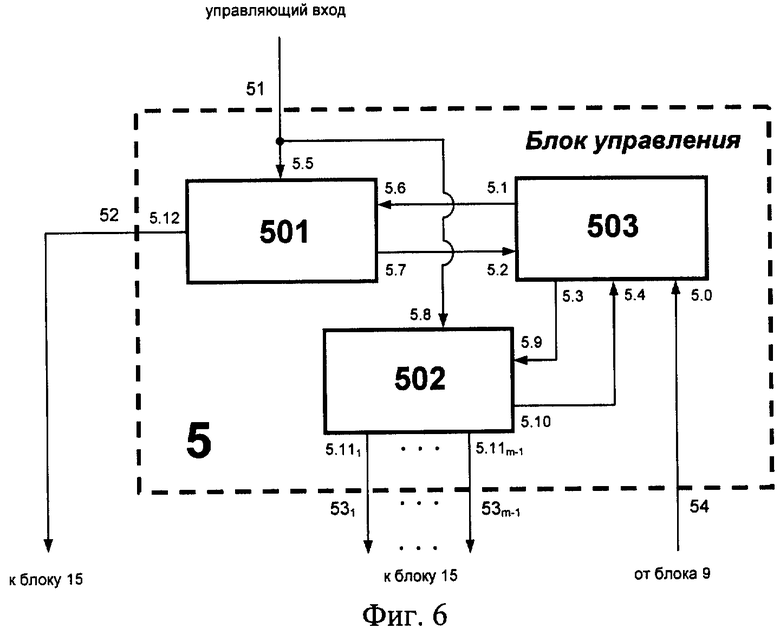
на фиг.6 - структурная схема блока управления.
Управляемый вероятностный автомат, изображенный на фиг.1, состоит из датчика случайной последовательности 1, блока формирования нецелочисленных значений индикаторов 2, блока коррекции 3, блока формирования значений матрицы 4, блока управления 5, блока пороговых устройств 6, блока формирования значений индикаторов 7, генератора тактовых импульсов 8, элемента ЗАПРЕТ 9, блока элементов И 10, блока памяти 11, дешифратора 12, блока задания времени 13, элемента ИЛИ 14 и блока повышения достоверности 15. Выход генератора тактовых импульсов 8 соединен с прямым входом элемента ЗАПРЕТ 9 и тактовым входом блока задания времени 13, m≥3 выходов которого являются соответствующими m выходами автомата и подключены к соответствующим m входам элемента ИЛИ 14, выход которого соединен с инверсным входом элемента ЗАПРЕТ 9, выход которого подключен к тактовому входу блока элементов И 10, тактовому входу 73 блока формирования значений индикаторов 7 и тактовому входу 54 блока управления 5, управляющий вход 51 которого является управляющим входом автомата, m выходов блока формирования значений индикаторов 7 соединены с соответствующими m входами блока элементов И 10, m выходов которого подключены к соответствующим m входам блока памяти 11, m выходов которого соединены с соответствующими m интерполяционными входами 221-22m блока формирования нецелочисленных значений индикаторов 2 и с m входами блока задания времени 13, управляющий вход которого подключен к выходу дешифратора 12, m управляющих входов 211-21m блока формирования нецелочисленных значений индикаторов 2 соединены с соответствующими m выходами 411-41m блока формирования значений матрицы 4, m выходов 231-23m блока формирования нецелочисленных значений индикаторов 2 соединены с соответствующими m вспомогательными входами 721-72m блока формирования значений индикаторов 7 и с m информационными входами 311-31m блока коррекции 3, стартовый вход 33 которого подключен к выходу датчика случайной последовательности 1. Выход 34 блока коррекции 3 соединен с входом блока пороговых устройств 6, m выходов которого подключены к соответствующим m информационным входам блока формирования значений индикаторов 7. Управляющий вход 150 блока повышения достоверности 15 подключен к управляющему выходу 52 блока управления 5, m-1 пороговых выходов 531-53m-1 которого соединены с соответствующими m-1 пороговыми входами 1531-153m-1 блока повышения достоверности 15, управляющий выход 151 которого подключен к входу дешифратора 12 и входу 40 блока формирования значений матрицы 4, m-1 пороговые выходы 1521-152m-1 блока повышения достоверности 15 подключены к соответствующим m-1 пороговым входам 321-32m-1 блока коррекции 3 и к m-1 пороговым входам 621-62m-1 блока пороговых устройств 6.
Число «m», «m≥3» (входов, выходов, сумматоров, умножителей, счетчиков, элементов сравнения и т.п.) определяется в соответствии с необходимой и достаточной степенью детализации пространства состояний (количеством состояний) моделируемого процесса и, как правило, составляет от 3 (трех) до 20 (двадцати).
Блок повышения достоверности 15 (фиг.2) предназначен для осуществления процедур последовательного сравнения (по количеству разрядов) поступающих в двоичном коде исходных данных, принятие решения об их математической природе и преобразование исходных данных, заданных недостоверно (неполно), к виду, пригодному для осуществления процедуры параметрического моделирования.
Блок повышения достоверности 15 состоит из контроллера исходных данных 1501 и преобразователя недостоверных данных 1502, m-1 недостоверные пороговые входы 152.21-152.2m-1 которого соединены с соответствующими m-1 недостоверными пороговыми выходами 151.61-151.6m-1 контроллера исходных данных 1501. Недостоверный управляющий выход 151.5 контроллера исходных данных 1501 подключен к недостоверному управляющему входу 152.1 преобразователя недостоверных данных 1502. Управляющий вход 151.1 контроллера исходных данных 1501 является управляющим входом 150 блока 15, управляющий выход 151.3 контроллера исходных данных 1501 соединен с управляющим выходом 152.3 преобразователя недостоверных данных 1502 и является управляющим выходом 151 блока 15, m-1 пороговые входы 151.21-151.2m-1 контроллера исходных данных 1501 являются соответствующими m-1 пороговыми входами 1531-153m-1 блока 15, m-1 пороговые выходы 152.41-152.4m-1 преобразователя недостоверных данных 1502 соединены с соответствующими m-1 достоверными пороговыми выходами 151.41-151.4m-1 контроллера исходных данных 1501 и являются соответствующими m-1 пороговыми выходами 1521-152m-1 блока повышения достоверности 15.
Контроллер исходных данных 1501 блока повышения достоверности 15 (фиг.3) предназначен для осуществления процедуры последовательного сравнения (по количеству разрядов) поступающих в двоичном коде исходных данных и принятия решения об их математической природе - исходные данные заданы количественно (параметрически) или качественно (недостоверно, неполно) с использованием аналитически сформулированных субъективных мнений (ассоциаций) экспертов о конкретных значениях порогов (границ) и элементов вероятностно-временного механизма (элементов матриц переходных вероятностей) смены состояний моделируемых случайных процессов. Контроллер исходных данных 1501 состоит из сдвигающего элемента 1510 и элемента хранения 1511. Вход 151-1 сдвигающего элемента 1510 является управляющим входом 151.1 контроллера исходных данных 1501, прямой выход 151-2 сдвигающего элемента 1510 является управляющим выходом 151.3 контроллера исходных данных 1501. Транзитный выход 151-3 сдвигающего элемента 1510 является недостоверным управляющим выходом 151.5 контроллера исходных данных 1501, m-1 входов 151-41-151-4m-1 элемента хранения 1511 являются m-1 пороговыми входами 151.21-151.2m-1 контроллера исходных данных 1501, m-1 прямых выходов 151-51-151-5m-1 элемента хранения 1511 являются m-1 достоверными пороговыми выходами 151.41-151.4m-1 контроллера исходных данных 1501, m-1 транзитных выходов 151-61-151-6m-1 элемента хранения 1511 являются m-1 недостоверными пороговыми выходами 151.61-151.6m-1 контроллера исходных данных 1501. Сдвигающий элемент 1510 может быть технически реализован в виде сдвигающего регистра для сдвига влево, как показано в литературе [Сидоров A.M., Гусев В.В., Лебедев О.Н. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. С.158-160, рис.5.28(6)]. Элемент хранения 1511 может быть реализован на базе типового регистра хранения на D-триггерах, описанного в литературе [Сидоров A.M., Гусев В.В., Лебедев О.Н. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. С.156-158, рис.5.27].
Преобразователь недостоверных данных 1502 блока повышения достоверности 15 (фиг.4) предназначен для осуществления процедуры преобразования исходных данных, заданных недостоверно (неполно), к виду, пригодному для осуществления процедуры параметрического моделирования. Преобразователь недостоверных данных 1502 представляет собой перепрограммируемый постоянный запоминающий элемент-вычислитель (ПЗЭВ) с одним разрешающим входом, одним разрешающим выходом, m-1 входами и m-1 выходами, где m может принимать значения от 3 до 20. Разрешающий вход V ПЗЭВ является недостоверным управляющим входом 152.1 преобразователя недостоверных данных 1502, разрешающий выход S ПЗЭВ является управляющим выходом 152.3 преобразователя недостоверных данных 1502, m-1 входов и m-1 выходов ПЗЭВ являются соответственно m-1 недостоверными пороговыми входами 152.21-152.2m-1 и соответственно m-1 пороговыми выходами 152.41-152.4m-1 преобразователя недостоверных данных 1502. Преобразователь недостоверных данных 1502 может быть технически реализован на основе перепрограммируемого постоянного запоминающего устройства серии 155 (например, К155ПР6), как показано в работе [Шило В.Л. Популярные цифровые микросхемы. Справочник. - М.: Радио и связь, 1987. С.172, рис.1.126].
Блок формирования значений матрицы 4 (фиг.5) предназначен для регистрации поступающих значений элементов матрицы переходных вероятностей, хранения, считывания управляющей информации и состоит из запоминающего элемента 401 и счетчика 402. Вход счетчика 402 является входом 40 блока 4, выход счетчика 402 соединен с входом запоминающего элемента 401, m выходов которого являются соответствующими m выходами 411-41m блока 4. Запоминающий элемент 401 может быть технически реализован в виде запоминающего устройства, описанного в [Быстров Ю.А., Великсон Я.М., Вогман В.Д. и др. Электроника: Справочная книга / Под ред. Быстрова Ю.А. - СПб.: Энергоатомиздат, 1996. С.291-292, рис.6.7]. Счетчик 402 может быть технически реализован на базе серийно выпускаемого счетчика, как показано в [Соботка З., Стары Я. Микропроцессорные системы. - М.: Энергоиздат, 1981. С.96-100].
Блок управления 5 (фиг.6) предназначен для формирования параметрической или недостоверной (неполной) управляющей кодовой последовательности, а также параметрической или недостоверной (неполной) последовательности пороговых значений состояний и состоит из управляющего ОЗЭ 501, порогового ОЗЭ 502 и счетчика 503. Первый 5.1 и второй 5.3 выходы счетчика 503 подключены соответственно к тактовым входам 5.6 управляющего ОЗЭ 501 и 5.9 порогового ОЗЭ 502. Первый 5.2 и второй 5.4 входы счетчика 503 соединены соответственно со сбрасывающими выходами 5.7 управляющего ОЗЭ 501 и 5.10 порогового ОЗЭ 502, третий вход 5.0 счетчика 503 является тактовым входом 54 блока 5. Информационные входы 5.5 управляющего ОЗЭ 501 и 5.8 порогового ОЗЭ 502 объединены и являются управляющим входом 51 блока 5, выход 5.12 управляющего ОЗЭ 501 является управляющим выходом 52 блока 5, m-1 выходы 5.111-5.11m-1 порогового ОЗЭ 502 являются соответствующими m-1 пороговыми выходами 531-53m-1 блока управления 5. Управляющий ОЗЭ 501 может быть технически реализован в виде типового оперативного запоминающего устройства, которое подробно описано в [Соботка З., Стары Я. Микропроцессорные системы. - М.: Энергоиздат, 1981. С.94-96]. Частный случай технической реализации счетчика 503 описан в [Соботка З., Стары Я. Микропроцессорные системы. - М.: Энергоиздат, 1981. С.96-100]. Техническая реализация порогового ОЗЭ 502 возможна по аналогии с серийно выпускаемым динамическим оперативным запоминающим устройством, описанным в [Сидоров A.M., Гусев В.В., Лебедев О.Н. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. С.194-196, рис.6.9].
Датчик случайной последовательности 1, входящий в общую структурную схему, предназначен для генерации значений случайной вспомогательной последовательности с нормальной плотностью распределения и может быть реализован в виде серийно выпускаемого датчика, описанного в [Мальцева Л.А., Франберг Э.М., Ямпольский B.C. Основы цифровой техники. - М.: Радио и связь, 1980. С.42, рис.25].
Блок формирования нецелочисленных значений индикаторов 2, входящий в общую структурную схему, предназначен для формирования элементов вектора нецелочисленных значений индикаторов состояния. Его структурная схема и принцип действия известны и описаны в прототипе (см. патент РФ №2139569, фиг.2).
Блок коррекции 3, входящий в общую структурную схему, предназначен для динамической коррекции математического ожидания (МО) и дисперсии случайной последовательности в соответствии с условиями, определяемыми принятой математической моделью. Его структурная схема и принцип действия известны и описаны в прототипе (см. патент РФ №2139569, фиг.3-7).
Блок пороговых устройств 6, входящий в общую структурную схему, предназначен для получения предварительных значений элементов вектора индикаторов состояния процесса. Его структурная схема и принцип действия известны и описаны в прототипе (см. патент РФ №2139569, фиг.9).
Блок формирования значений индикаторов 7, входящий в общую структурную схему, предназначен для получения окончательных значений элементов вектора индикаторов состояния процесса. Его структурная схема и принцип действия известны и описаны в прототипе (см. патент РФ №2139569, фиг.10).
Генератор тактовых импульсов 8, входящий в общую структурную схему, предназначен для определения моментов выхода вероятностного автомата из предыдущего состояния и реализуется в виде известного генератора пилообразного напряжения, описанного в работе [Быстров Ю.А., Великсон Я.М., Вогман В.Д. и др. Электроника: Справочная книга / Под ред. Быстрова Ю.А. - СПб.: Энергоатомиздат, 1996. С.149-151, рис.3.14 (а)].
Элемент ЗАПРЕТ 9 и элемент ИЛИ 14, входящие в общую структурную схему, предназначены для поддержки процедуры определения моментов выхода вероятностного автомата из предыдущего состояния и могут быть построены на базе серийно выпускаемых элементов ЗАПРЕТ и ИЛИ, подробно описанных в [Мальцева Л.А., Франберг Э.М., Ямпольский B.C. Основы цифровой техники. - М.: Радио и связь, 1980. С.20-24, рис.9, 11].
Блок элементов И 10, входящий в общую структурную схему, предназначен для осуществления записи полученных значений элементов вектора индикаторов состояния в блок памяти. Элементы И, входящие в блок элементов И 10, реализуются в виде известных и описанных в [Сидоров A.M., Гусев В.В., Лебедев О.Н. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. С.13-14, рис.1.2].
Блок памяти 11, входящий в общую структурную схему, предназначен для хранения значений элементов вектора индикаторов состояния до момента истечения периода смены состояний и реализуется в виде типового регистра хранения в соответствии с описанием, представленным в работе [Сидоров A.M., Гусев В.В., Лебедев О.Н. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. С.156-158, рис.5.27].
Дешифратор 12, входящий в общую структурную схему, предназначен для преобразования управляющей кодовой последовательности в код, соответствующий временному интервалу периода смены состояний и построен в виде серийно выпускаемого дешифратора, описанного в книге [Богданович М.И., Грель И.Н., Прохоренко В.А. и др. Цифровые интегральные микросхемы: Справочник. - Минск: Беларусь, 1991. С.432-436, рис.4.46].
Блок задания времени 13, входящий в общую структурную схему, предназначен для формирования нулевой комбинации, определяющей момент истечения периода смены состояний и реализуется в виде цифрового таймера, аналогично описанному в работе [Фролкин В.Т., Попов Л.Н. Импульсные и цифровые устройства. - М.: Радио и связь, 1992. С.264-267, рис.7.48].
Вероятностный автомат работает следующим образом. Известно, что для аналитического вероятностно-временного описания системы показателей качества функционирования СМКРС и ЛВС применяется аппарат управляемых цепей Маркова в форме разностных стохастических уравнений [2-4]. Вместе с тем, анализ работ [1, 5-8] позволяет сформировать математически корректный алгоритм приведения недостоверно (недостаточно, неполно) заданных исходных данных - элементов матриц переходных вероятностей, пороговых значений (границ) состояний, к ближайшему достоверному множеству. Таким образом, в рамках моделирования управляемых полумарковских цепей, формируемых с учетом как количественно, так и качественно (недостоверно, недостаточно, неполно) заданных исходных данных, ряд характеристик сети моделируется на основе параметрически заданных исходных данных, традиционными методами, а моделирование недостоверно (недостаточно, неполно) заданных параметров сети, путем последовательных преобразований с использованием нейросетевых вычислительных методов и алгоритмов, сводится к возможности их относительно параметрического моделирования, т.е. осуществляется переход от недостоверно (недостаточно, неполно) поставленной задачи моделирования к параметрической.
Для решения задачи объединения неполных, недостоверных, а иногда и противоречивых мнений экспертов о значениях исходных данных для моделирования - элементов матрицы переходных вероятностей и пороговых значений (границ) состояний моделируемого процесса, используется один из типовых вычислительных алгоритмов теории нейронных сетей - нейросетевой экстраполирующий вычислительный алгоритм, или, так называемая, экстраполирующая нейронная сеть (ЭНС), являющаяся разновидностью известных вычислительных моделей ассоциативной памяти [5, 6].
Вычислительный нейросетевой алгоритм (экстраполирующая нейронная сеть) такого класса состоит из двух слоев вычислителей (нейронов) - входного слоя Sa и выходного слоя Sb. Входной слой Sa состоит из mвх нейронов, обладающих набором прямых и обратных связей с mвых нейронами выходного слоя Sb, причем количество входных и выходных образов m равно (m=mвх=mвых) и соответствует ранее введенному количеству «m». В ЭНС используется так называемая когнитивная карта, полностью задаваемая матрицей связей вида:
Когнитивная карта характеризует причинно-следственные отношения отдельных параметров исходных данных и формулируется экспертами, принцип формирования когнитивных карт подробно описан в работах [5, 6].
При этом одна из ветвей вычислительного нейросетевого алгоритма предназначена для преобразования недостоверных (неполных) мнений экспертов о значениях элементов матрицы переходных вероятностей, а остальные m-1 ветви алгоритма отвечают за преобразование недостоверных (неполных) мнений экспертов о пороговых значениях (границах) состояний моделируемого процесса. Каждый элемент wij матрицы (6) определяет связь от i-го элемента (отдельного параметра) недостоверно заданных исходных данных j-ому элементу, причем положительные связи кодируются 1, отрицательные - 1, а отсутствие связей между элементами кодируется 0.
На вход вычислительного нейросетевого алгоритма (ЭНС) поступает входной образ  , характеризующий множество известных как параметрически (достоверно), так и недостоверно заданных элементов (отдельных параметров) исходных данных для моделирования СМКРС и ЛВС. Определяется, какие q элементов (отдельных параметров), составляющих подмножество Ωq из множества исходных данных
, характеризующий множество известных как параметрически (достоверно), так и недостоверно заданных элементов (отдельных параметров) исходных данных для моделирования СМКРС и ЛВС. Определяется, какие q элементов (отдельных параметров), составляющих подмножество Ωq из множества исходных данных  в данный момент времени заданы количественно (параметрически), а какие элементы (отдельные параметры) из множества исходных данных, необходимые (предпочтительные) для осуществления задачи достоверного моделирования - неопределенны (недостоверны, неточны). В целях получения достоверных результатов моделирования необходимо реконструировать недостоверно заданные элементы исходных данных.
в данный момент времени заданы количественно (параметрически), а какие элементы (отдельные параметры) из множества исходных данных, необходимые (предпочтительные) для осуществления задачи достоверного моделирования - неопределенны (недостоверны, неточны). В целях получения достоверных результатов моделирования необходимо реконструировать недостоверно заданные элементы исходных данных.
Функционирование вычислительного нейросетевого алгоритма осуществляется следующим образом:
1. Активизируется входной слой Sa сети входным образом . Иными словами, вычислители (нейроны) входного слоя приводятся в начальные состояния

2. Производится начальная инициализация вычислителей (нейронов) выходного слоя в соответствии с выражением:

3. Происходит приведение нейронов входного слоя к состоянию нейронов выходного слоя:

4. Производится вычисление новых состояний вычислителей (нейронов) выходного слоя для всех  по формуле:
по формуле:

5. Происходит повторение шагов 3-4 до тех пор, пока ЭНС не достигнет стабильного состояния:

На выходе вычислительного нейросетевого алгоритма (ЭНС) имеем выходной вектор  принимающий ряд значений состояний, которые определяются на основе выражения (5) и полностью (достоверно) характеризуют интегрированное мнение экспертов о значениях элементов матрицы переходных вероятностей и пороговых значениях (границах) состояний моделируемого процесса.
принимающий ряд значений состояний, которые определяются на основе выражения (5) и полностью (достоверно) характеризуют интегрированное мнение экспертов о значениях элементов матрицы переходных вероятностей и пороговых значениях (границах) состояний моделируемого процесса.
Рассмотренный вычислительный нейросетевой алгоритм позволяет уточнить, реконструировать, устранить неопределенность (недостоверность, неполноту) при формировании исходных данных для моделирования процесса смены состояний СМКРС и ЛВС. Уточнение, реконструкция недостоверно (неполно) заданных параметров позволяют повысить объективность задания исходных данных, а в конечном итоге, повысить достоверность моделирования процессов, происходящих в реальных СМКРС и ЛВС, с учетом недостоверной (неполной, неточной) информации о состоянии среды распространения радиоволн, помеховой обстановке, собственном графике сети, поведении системы управления сетью и влиянии других дестабилизирующих факторов.
С учетом этого осуществляется моделирование в заявленном вероятностном автомате. С выхода датчика случайной последовательности 1 значения случайной вспомогательной последовательности х' с нормальной плотностью распределения в двоичном коде поступают на стартовый вход 33 блока коррекции 3. В блоке формирования нецелочисленных значений индикаторов 2, на основе полученных в двоичном коде с интерполяционных входов 221-22m элементов вектора целочисленных значений индикаторов состояния моделируемого процесса на предыдущем шаге и полученных в двоичном коде с управляющих входов 211-21m элементов матрицы вероятностей перехода процесса из одного состояния в другое, осуществляется вычисление элементов вектора нецелочисленных значений индикаторов состояния в соответствии с выражением:

являющимся модификацией известного уравнения Колмогорова-Чепмена [4].
Здесь  - вектор нецелочисленных значений индикаторов состояния моделируемого процесса, имеющий математический смысл пошаговых и, в конечном итоге, финальных вероятностей нахождения случайного процесса в том или ином состоянии; ϕT(k+1,k,u) - матрица вероятностей перехода процесса из одного состояния в другое;
- вектор нецелочисленных значений индикаторов состояния моделируемого процесса, имеющий математический смысл пошаговых и, в конечном итоге, финальных вероятностей нахождения случайного процесса в том или ином состоянии; ϕT(k+1,k,u) - матрица вероятностей перехода процесса из одного состояния в другое;  - вектор целочисленных значений индикаторов состояния моделируемого процесса на предыдущем шаге. С выходов 231-23m блока 2 элементы вектора нецелочисленных значений индикаторов
- вектор целочисленных значений индикаторов состояния моделируемого процесса на предыдущем шаге. С выходов 231-23m блока 2 элементы вектора нецелочисленных значений индикаторов  в двоичном коде подаются на информационные входы 311-31m блока коррекции 3 и на вспомогательные входы 721-72m блока формирования значений индикаторов 7.
в двоичном коде подаются на информационные входы 311-31m блока коррекции 3 и на вспомогательные входы 721-72m блока формирования значений индикаторов 7.
В блоке 3 по нецелочисленным значениям индикаторов состояния (вероятностям состояний), поступающим в двоичном коде на информационные входы 311-31m и с учетом пороговой информации, поступающей в двоичном коде на пороговые входы 321-32m-1 производится динамическая коррекция математического ожидания (МО) и дисперсии случайной последовательности х' в соответствии с условиями, определяемыми принятой моделью [2-4]. В результате, на выходе 34 блока коррекции 3 в двоичном коде, в моменты выхода автомата из предыдущего состояния (смена такта), имеем выборочное значение случайной величины х*, полученное из модифицированной случайной последовательности х' с МО и дисперсией, соответствующими заданным условиям моделирования.
Выборочное значение случайной величины х* с МО и дисперсией, соответствующими заданным условиям моделирования, поступает в двоичном коде на информационный вход блока пороговых устройств 6. На m-1 пороговые входы 621-62m-1 блока 6 с m-1 пороговых выходов 1521-152m-1 блока повышения достоверности 15 поступают в двоичном коде пороговые значения состояний процесса Хпор 1-Хпор m-1. В результате - предварительные значения индикаторов состояний  выдаются в двоичном коде на выходы 641-64m блока пороговых устройств 6. Таким образом, на m выходах блока пороговых устройств 6 имеем m элементов вектора
выдаются в двоичном коде на выходы 641-64m блока пороговых устройств 6. Таким образом, на m выходах блока пороговых устройств 6 имеем m элементов вектора  предварительных значений индикаторов состояний моделируемого процесса, которые используются в дальнейшем для формирования значений индикаторов в соответствии с выражениями, описанными в [4].
предварительных значений индикаторов состояний моделируемого процесса, которые используются в дальнейшем для формирования значений индикаторов в соответствии с выражениями, описанными в [4].
Вычисление значений индикаторов состояния  реализует блок формирования значений индикаторов 7 с учетом поступающих в двоичном коде на вспомогательные входы 721-72m параметров элементов вектора нецелочисленных значений индикаторов
реализует блок формирования значений индикаторов 7 с учетом поступающих в двоичном коде на вспомогательные входы 721-72m параметров элементов вектора нецелочисленных значений индикаторов  из блока 2. Полученные элементы вектора индикаторов состояний через выходы блока формирования значений индикаторов 7 подаются в двоичном коде на входы блока элементов И 10.
из блока 2. Полученные элементы вектора индикаторов состояний через выходы блока формирования значений индикаторов 7 подаются в двоичном коде на входы блока элементов И 10.
Блок управления 5 представляет собой куб оперативной памяти, в котором записана программа работы устройства и может быть реализован по схеме, представленной на фиг.6. Формирование управляющей кодовой последовательности и последовательности пороговых значений производится следующим образом. С внешнего источника через управляющий вход 51 блока управления 5 на информационный вход 5.5 управляющего ОЗЭ 501 производится запись в двоичном коде количественных либо качественных (недостоверных, неполных) значений элементов матрицы переходных вероятностей (ПВ), соответствующих вводимому управлению, в ячейки памяти управляющего ОЗЭ 501. Через этот же управляющий вход 51 блока управления 5 на информационный вход 5.8 порогового ОЗЭ 502 производится запись в двоичном коде количественных пороговых значений Хпор1-Хпор m-1 либо качественных (недостоверных, неполных) пороговых значений  состояний моделируемого процесса, в ячейки памяти порогового ОЗЭ 502. Отсчеты моментов выхода автомата из предыдущего состояния поступают от элемента ЗАПРЕТ 9 через тактовый вход 54 блока управления 5 на третий 5.0 вход счетчика 503 и определяют, поступая с выходов 5.1 и 5.3 счетчика 503 на тактовые входы 5.6 управляющего ОЗЭ 501 и 5.9 порогового ОЗЭ 502 соответственно, момент начала считывания значений элементов хранящейся в ОЗЭ 501 новой (количественной или недостоверной (неполной)) матрицы ПВ в двоичном коде через управляющий выход 52 блока управления 5 на управляющий вход 150 блока повышения достоверности 15, а также момент начала считывания в двоичном коде новых количественных (Xпор1-Хпор m-1) либо качественных
состояний моделируемого процесса, в ячейки памяти порогового ОЗЭ 502. Отсчеты моментов выхода автомата из предыдущего состояния поступают от элемента ЗАПРЕТ 9 через тактовый вход 54 блока управления 5 на третий 5.0 вход счетчика 503 и определяют, поступая с выходов 5.1 и 5.3 счетчика 503 на тактовые входы 5.6 управляющего ОЗЭ 501 и 5.9 порогового ОЗЭ 502 соответственно, момент начала считывания значений элементов хранящейся в ОЗЭ 501 новой (количественной или недостоверной (неполной)) матрицы ПВ в двоичном коде через управляющий выход 52 блока управления 5 на управляющий вход 150 блока повышения достоверности 15, а также момент начала считывания в двоичном коде новых количественных (Xпор1-Хпор m-1) либо качественных  пороговых значений состояний моделируемого процесса, хранящихся в ячейках памяти порогового ОЗЭ 502. Считывание пороговых значений производится с m-1 выходов 5.111-5.11m-1 порогового ОЗЭ 502 через m-1 пороговые выходы 531-53m-1 блока управления 5 на пороговые m-1 входы 1531-153m-1 блока повышения достоверности 15. Со сбрасывающих выходов 5.7 и 5.10 управляющего ОЗЭ 501 и порогового ОЗЭ 502 соответственно на первый 5.2 и второй 5.4 входы счетчика 503 в момент считывания матрицы ПВ или пороговых значений поступает сигнал, сбрасывающий значения счетчика 503 и дающий команду счетчику 503 начать новый отсчет для вновь введенных количественных либо качественных (недостоверных) управляющих воздействий и пороговых значений (Хпор1-Хпор m-1 или
пороговых значений состояний моделируемого процесса, хранящихся в ячейках памяти порогового ОЗЭ 502. Считывание пороговых значений производится с m-1 выходов 5.111-5.11m-1 порогового ОЗЭ 502 через m-1 пороговые выходы 531-53m-1 блока управления 5 на пороговые m-1 входы 1531-153m-1 блока повышения достоверности 15. Со сбрасывающих выходов 5.7 и 5.10 управляющего ОЗЭ 501 и порогового ОЗЭ 502 соответственно на первый 5.2 и второй 5.4 входы счетчика 503 в момент считывания матрицы ПВ или пороговых значений поступает сигнал, сбрасывающий значения счетчика 503 и дающий команду счетчику 503 начать новый отсчет для вновь введенных количественных либо качественных (недостоверных) управляющих воздействий и пороговых значений (Хпор1-Хпор m-1 или 
Блок повышения достоверности 15 может быть реализован по схеме, представленной на фиг.2. Последовательное сравнение (по количеству разрядов) поступающих в двоичном коде исходных данных, принятие решения об их математической природе и преобразование исходных данных, заданных недостоверно (неполно), к виду, пригодному для осуществления процедуры параметрического моделирования, осуществляется следующим образом. Изначально качественная и количественная (недостоверная, неполная) информация, поступающая из блока управления 5, различается по количеству разрядов:
для записи в двоичном коде количественной информации (как управляющей, так и пороговой) достаточно 5 (пяти) разрядов двоичного кода, тогда как недостоверная, неполная (качественная) информация заведомо избыточна, несет в себе помимо обычного числа еще и характеристику причинно-следственных когнитивных отношений, формулируемых экспертами, что объективно требует использования 10 (десяти) разрядов двоичного кода как для недостоверной (неполной) управляющей, так и для недостоверной (неполной) пороговой информации.
С учетом этого факта построен контроллер исходных данных 1501 блока повышения достоверности 15, изображенный на фиг.3. Процедура последовательного сравнения (по количеству разрядов) поступающих в двоичном коде исходных данных и принятие решения об их математической природе в контроллере исходных данных 1501 осуществляется следующим образом. Сдвигающий элемент 1510 и элемент хранения 1511 контроллера исходных данных 1501 рассчитаны на хранение пяти разрядов поступающей информации, если количество разрядов превышает данную цифру, значит, с точки зрения математики - эта информация поступает в недостоверной (неполной) форме. В этом случае оба элемента (1510 и 1511) контроллера исходных данных 1501 выполняют функции транзитного узла, отправляя информацию сразу на входы преобразователя недостоверных данных 1502 блока повышения достоверности 15. Если на вход 151-1 сдвигающего элемента 1510 поступает в двоичном коде управляющая информация в количестве пяти разрядов, сдвигающий элемент 1510 записывает эту информацию и с прямого выхода 151-2 направляет ее через управляющий выход 151.3 контроллера исходных данных 1501 и управляющий выход 151 блока 15 на вход 40 блока формирования значений матрицы 4 и на вход дешифратора 12. В случае, когда количество разрядов управляющей информации больше пяти, сдвигающий элемент 1510 не записывает эту информацию, а с транзитного выхода 151-3 направляет ее  через недостоверный управляющий выход 151.5 контроллера исходных данных 1501 на недостоверный управляющий вход 152.1 преобразователя недостоверных данных 1502. Если на каждый из m-1 входов 151-41 - 151-4m-1 элемента хранения 1511 поступает в двоичном коде пороговая информация в количестве пяти разрядов (Хпор1-Xпор m-1), элемент хранения 1511 записывает эту информацию и с прямых выходов 151-51 - 151-5m-1 направляет ее через достоверные пороговые выходы 151.41-151.4m-1 контроллера исходных данных 1501 и пороговые выходы 1521-152m-1 блока 15 на пороговые входы 321-32m-1 блока коррекции 3 и на пороговые входы 621-62m-1 блока пороговых устройств 6. В случае, когда количество разрядов пороговой информации больше пяти , элемент хранения 1511 не записывает эту информацию, а с m-1 транзитных выходов 151-61-151-6m-1 направляет ее через недостоверные пороговые выходы 151.61-151.6m-1 контроллера исходных данных 1501 на m-1 недостоверные пороговые входы 152.21-152.2m-1 преобразователя недостоверных данных 1502 блока повышения достоверности 15.
через недостоверный управляющий выход 151.5 контроллера исходных данных 1501 на недостоверный управляющий вход 152.1 преобразователя недостоверных данных 1502. Если на каждый из m-1 входов 151-41 - 151-4m-1 элемента хранения 1511 поступает в двоичном коде пороговая информация в количестве пяти разрядов (Хпор1-Xпор m-1), элемент хранения 1511 записывает эту информацию и с прямых выходов 151-51 - 151-5m-1 направляет ее через достоверные пороговые выходы 151.41-151.4m-1 контроллера исходных данных 1501 и пороговые выходы 1521-152m-1 блока 15 на пороговые входы 321-32m-1 блока коррекции 3 и на пороговые входы 621-62m-1 блока пороговых устройств 6. В случае, когда количество разрядов пороговой информации больше пяти , элемент хранения 1511 не записывает эту информацию, а с m-1 транзитных выходов 151-61-151-6m-1 направляет ее через недостоверные пороговые выходы 151.61-151.6m-1 контроллера исходных данных 1501 на m-1 недостоверные пороговые входы 152.21-152.2m-1 преобразователя недостоверных данных 1502 блока повышения достоверности 15.
Преобразователь недостоверных данных 1502 блока повышения достоверности 15 может быть технически реализован в виде перепрограммируемого (с точки зрения матрицы весов (1) - причинно-следственных когнитивных отношений, формулируемых экспертами) ПЗЭВ, реализующего вычислительный нейросетевой алгоритм (2)-(6) в соответствии со схемой, изображенной на фиг.4. Преобразование исходных данных, заданных недостоверно (неполно), к виду, пригодному для осуществления процедуры параметрического моделирования, осуществляется следующим образом. Недостоверная (неполная) управляющая информация (элементы матрицы переходных вероятностей  в двоичном коде поступает с недостоверного управляющего выхода 151.5 контроллера исходных данных 1501 на недостоверный управляющий вход 152.1 преобразователя недостоверных данных 1502 и на разрешающий вход V ПЗЭВ. Недостоверная (неполная) пороговая информация в двоичном коде поступает с недостоверных пороговых выходов 151.61-151.6m-1 контроллера исходных данных 1501 на недостоверные пороговые входы 152.21-152.2m-1 преобразователя недостоверных данных 1502 и на m-1 входов (1,...,m-1) перепрограммируемого ПЗЭВ. Перепрограммируемый ПЗЭВ в соответствии с запрограммированными элементами (wij) матрицы весов W (1) - аналитически описанными причинно-следственными когнитивными отношениями, формулируемыми экспертами, осуществляет процедуру вычисления (экстраполяции) в соответствии с вычислительным нейросетевым алгоритмом (2)-(6). При этом как разрешающий вход V, так и m-1 входы (1,...,m-1) перепрограммируемого ПЗЭВ являются группой равноправных m входов (max) вычислителей (нейронов) входного слоя Sa ЭНС, на которую в двоичном коде подаются элементы вектора
в двоичном коде поступает с недостоверного управляющего выхода 151.5 контроллера исходных данных 1501 на недостоверный управляющий вход 152.1 преобразователя недостоверных данных 1502 и на разрешающий вход V ПЗЭВ. Недостоверная (неполная) пороговая информация в двоичном коде поступает с недостоверных пороговых выходов 151.61-151.6m-1 контроллера исходных данных 1501 на недостоверные пороговые входы 152.21-152.2m-1 преобразователя недостоверных данных 1502 и на m-1 входов (1,...,m-1) перепрограммируемого ПЗЭВ. Перепрограммируемый ПЗЭВ в соответствии с запрограммированными элементами (wij) матрицы весов W (1) - аналитически описанными причинно-следственными когнитивными отношениями, формулируемыми экспертами, осуществляет процедуру вычисления (экстраполяции) в соответствии с вычислительным нейросетевым алгоритмом (2)-(6). При этом как разрешающий вход V, так и m-1 входы (1,...,m-1) перепрограммируемого ПЗЭВ являются группой равноправных m входов (max) вычислителей (нейронов) входного слоя Sa ЭНС, на которую в двоичном коде подаются элементы вектора  , имеющие физический смысл недостоверной (неполной) управляющей
, имеющие физический смысл недостоверной (неполной) управляющей  и пороговой
и пороговой  информации. Набор прямых и обратных связей mвх с mвых ЭНС, программно реализованный в рамках перепрограммируемого ПЗЭВ, позволяет учитывать при вычислениях значения элементов (wij) матрицы весов W (1) и получать, в результате арифметических вычислений в соответствии с вычислительным нейросетевым алгоритмом (2)-(6), экстраполированные значения элементов вектора
информации. Набор прямых и обратных связей mвх с mвых ЭНС, программно реализованный в рамках перепрограммируемого ПЗЭВ, позволяет учитывать при вычислениях значения элементов (wij) матрицы весов W (1) и получать, в результате арифметических вычислений в соответствии с вычислительным нейросетевым алгоритмом (2)-(6), экстраполированные значения элементов вектора  , полностью (достоверно) характеризующие интегрированное мнение экспертов о значениях элементов матрицы переходных вероятностей
, полностью (достоверно) характеризующие интегрированное мнение экспертов о значениях элементов матрицы переходных вероятностей  и пороговых значениях (границах) состояний моделируемого процесса (Хпор1-Xпор m-1). При этом подача (и запись на хранение) в двоичном коде на любой i-ый вход ПЗЭВ (в любую i-ую ячейку памяти ПЗЭВ) значения недостоверно (неполно) заданного параметра (управляющего или порогового), инициирует выдачу в двоичном коде с i-го выхода ПЗЭВ (выхода i-го нейрона выходного слоя Sb) запрограммированного, в соответствии с вычислительным нейросетевым алгоритмом (2)-(6), значения математически корректно преобразованного, относительно достоверно заданного управляющего или порогового параметра. Таким образом, с m-1 (1,...,m-1) выходов ПЗЭВ полученные количественные (относительно достоверные) пороговые значения (границы) состояний моделируемого процесса (Хпор1-Xпор m-1) в двоичном коде через пороговые выходы 152.41-152.4m-1 преобразователя недостоверных данных 1502 и пороговые выходы 1521-152m-1 блока повышения достоверности 15 поступают на пороговые входы 321-32m-1 блока коррекции 3 и на пороговые входы 621-62m-1 блока пороговых устройств 6, а с разрешающего выхода S ПЗЭВ полученные количественные (относительно достоверные) значения элементов матрицы ПВ в двоичном коде через управляющий выход 152.3 преобразователя недостоверных данных 1502 и управляющий выход 151 блока повышения достоверности 15 поступают на вход дешифратора 12 и на вход 40 блока формирования значений матрицы 4.
и пороговых значениях (границах) состояний моделируемого процесса (Хпор1-Xпор m-1). При этом подача (и запись на хранение) в двоичном коде на любой i-ый вход ПЗЭВ (в любую i-ую ячейку памяти ПЗЭВ) значения недостоверно (неполно) заданного параметра (управляющего или порогового), инициирует выдачу в двоичном коде с i-го выхода ПЗЭВ (выхода i-го нейрона выходного слоя Sb) запрограммированного, в соответствии с вычислительным нейросетевым алгоритмом (2)-(6), значения математически корректно преобразованного, относительно достоверно заданного управляющего или порогового параметра. Таким образом, с m-1 (1,...,m-1) выходов ПЗЭВ полученные количественные (относительно достоверные) пороговые значения (границы) состояний моделируемого процесса (Хпор1-Xпор m-1) в двоичном коде через пороговые выходы 152.41-152.4m-1 преобразователя недостоверных данных 1502 и пороговые выходы 1521-152m-1 блока повышения достоверности 15 поступают на пороговые входы 321-32m-1 блока коррекции 3 и на пороговые входы 621-62m-1 блока пороговых устройств 6, а с разрешающего выхода S ПЗЭВ полученные количественные (относительно достоверные) значения элементов матрицы ПВ в двоичном коде через управляющий выход 152.3 преобразователя недостоверных данных 1502 и управляющий выход 151 блока повышения достоверности 15 поступают на вход дешифратора 12 и на вход 40 блока формирования значений матрицы 4.
Блок формирования значений матрицы 4 может быть реализован в соответствии со схемой, предложенной на фиг.5. Регистрация поступающих значений элементов матрицы переходных вероятностей, хранение и считывание управляющей информации осуществляется следующим образом. Значения элементов матрицы ПВ в двоичном коде поступают на вход счетчика 402, где происходит их подсчет и регистрация - совпадает ли количество поступивших значений элементов матрицы ПВ с размерностью самой матрицы, определяемой условиями моделирования. С выхода счетчика управляющая информация поступает на вход запоминающего элемента 401, предназначенного для хранения и считывания значений элементов матрицы ПВ. При поступлении новых управляющих воздействий запоминающий элемент 401 освобождает ячейки памяти, передавая управляющую информацию построчно (отдельно каждую строку матрицы ПВ - через отдельный выход) через m выходов 411-41m блока формирования значений матрицы 4 соответственно на m управляющих входов 211-21m блока формирования нецелочисленных значений индикаторов 2.
Значения элементов матрицы ПВ поддерживаются постоянными на выходах блока 4 в течение цикла управления, определяемого генератором тактовых импульсов 8. Пороговые значения состояний моделируемого процесса Хпор1-Xпор m-1 в течение цикла управления поддерживаются постоянными на пороговых выходах 1521-152m-1 блока повышения достоверности 15 и служат для реализации вычислений, проводимых в блоке коррекции 3, а также используются для получения элементов вектора предварительных значений индикаторов состояния процесса, осуществляемого в блоке пороговых устройств 6.
Моменты выхода автомата из предыдущего состояния определяются генератором тактовых импульсов 8, элементом ИЛИ 14, элементом ЗАПРЕТ 9 при формировании нулевой комбинации на выходе блока задания времени 13. С помощью блока элементов И 10 производится запись полученных значений элементов вектора индикаторов состояний моделируемого процесса в блок памяти 11, где они хранятся до момента истечения периода k (периода смены состояния), определяемого блоком задания времени 13 по значениям кода, формируемого на основе управляющий воздействий. При этом значения управляющей кодовой последовательности с управляющего выхода 151 блока повышения достоверности 15 поступают на дешифратор 12, преобразуются им в код, соответствующий временному интервалу периода смены состояний k, записываются в реверсивный счетчик блока 13 и считываются генератором тактовых импульсов 8 до момента появления нулевой комбинации на выходе блока 13, свидетельствующей об истечении времени пребывания автомата в данном состоянии. Управление вероятностно-временным механизмом смены состояний автомата и пороговыми значениями состояний осуществляется по управляющим кодовым и пороговым комбинациям, поступающим с управляющего и пороговых выходов (соответственно 151 и 1521-152m-1) блока повышения достоверности 15 в моменты выхода автомата из предыдущего состояния.
В итоге, на выходах блока 13 имеем записанные в двоичном коде относительно достоверные значения индикаторов состояния управляемого вероятностного автомата в каждый из моментов времени (определяемых генератором тактовых импульсов 8), с учетом управляющих воздействий и динамически изменяемых пороговых значений (границ) состояний, задаваемых как количественно, так и качественно (недостоверно, неполно).
Таким образом, анализ принципа работы заявляемого вероятностного автомата показывает очевидность того факта, что наряду с сохраненными возможностями моделирования управляемых полумарковских цепей с динамической коррекцией пороговых значений (границ) состояний моделируемых случайных процессов, автомат способен повысить достоверность моделирования управляемых полумарковских цепей, формируемых с учетом как количественно, так и качественно (недостоверно, неполно) заданных исходных данных, описывающих пороговые значения (границы) и вероятностно-временной механизм (элементы матриц переходных вероятностей) смены состояний моделируемых случайных процессов, имеющих место в реальных сетях многоканальной радиосвязи и локальных вычислительных сетях.
Данный вероятностный автомат обеспечивает повышение достоверности моделирования параметров реального процесса функционирования сетей многоканальной радиосвязи и локальных вычислительных сетей в условиях недостоверности (недостаточности, неполноты) исходных данных, обусловленных нестабильностью (неопределенностью, изменчивостью) условий функционирования сетей такого класса. Это, в свою очередь, позволяет повысить степень адекватности модели, уровень достоверности результатов анализа качества и эффективности функционирования сетей и, как следствие, повысить обоснованность принимаемых решений по управлению структурой, параметрами и режимами работы СМКРС и ЛВС, что существенно расширяет функциональные возможности аппаратуры, где заявленный вероятностный автомат будет использован.
Источники информации
1. Уоссермен Ф. Нейрокомпьютерная техника: Теория и практика. - М.: Мир, 1992. - 240 с.
2. Петухов Г.Б. Основы теории эффективности целенаправленных процессов. Часть I. Методология, методы, модели. - М.: МО СССР, 1989. - 660 с.
3. Терентьев В.М., Санин Ю.В. Анализ эффективности функционирования автоматизированных сетей многоканальной радиосвязи. - СПб.: ВАС, 1992. - 80 с.
4. Терентьев В.М., Паращук И.Б. Теоретические основы управления сетями многоканальной радиосвязи. - СПб.: ВАС, 1995. - 195 с.
5. Kosko В. Fuzzy cognitive maps // International Journal of Man-Machine Studies. V.24. N.Y., 1986. P.16-22.
6. Щербаков М.А. Искусственные нейронные сети. - Пенза: ПГТУ, 1996. - 44 с.
7. Трахтенгерц Э.А. Компьютерная поддержка принятия решений. - М.: СИНТЕГ, 1998. - 342 с.
8. Горбань А.Н., Россиев Д.А. Нейронные сети на персональном компьютере. - Новосибирск: Наука. Сибирская издательская фирма РАН, 1996. - 146 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2018 |
|
RU2718214C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2021 |
|
RU2777531C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2000 |
|
RU2169944C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2001 |
|
RU2195697C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 1998 |
|
RU2139569C1 |
| УСТРОЙСТВО ДЛЯ ПАРАМЕТРИЧЕСКОЙ ОЦЕНКИ ЗАКОНА РАСПРЕДЕЛЕНИЯ ПОТОКОВ СООБЩЕНИЙ | 2005 |
|
RU2279125C1 |
| Устройство для прогнозирования случайных событий | 2019 |
|
RU2705010C1 |
| УСТРОЙСТВО ДЛЯ СТОХАСТИЧЕСКОГО И НЕЧЁТКОГО МОДЕЛИРОВАНИЯ ПРОЦЕССА ФУНКЦИОНИРОВАНИЯ ПЕРСПЕКТИВНЫХ ТЕЛЕКОММУНИКАЦИОННЫХ СЕТЕЙ | 2021 |
|
RU2773870C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ | 2005 |
|
RU2281561C1 |
| УСТРОЙСТВО ДЛЯ ПРОГНОЗИРОВАНИЯ СЛУЧАЙНЫХ СОБЫТИЙ | 2020 |
|
RU2763126C1 |
Изобретение относится к радиотехнике и вычислительной технике и предназначено для использования в комплексах автоматизированных систем управления сетями многоканальной радиосвязи и в средствах обработки и передачи данных локальных вычислительных сетей. Технический результат - повышение достоверности моделирования параметров реального процесса функционирования сетей многоканальной радиосвязи и локальных вычислительных сетей в условиях недостоверности (недостаточности, неполноты) исходных данных, вероятностного автомата, способного с высокой достоверностью моделировать управляемые полумарковские цепи, формируемые с учетом как количественно, так и качественно (недостоверно, неполно) заданных исходных данных, описывающих пороговые значения (границы) и вероятностно-временной механизм (элементы матриц переходных вероятностей) смены состояний моделируемых случайных процессов. Вероятностный автомат содержит датчик случайной последовательности 1, блок формирования нецелочисленных значений индикаторов 2, блок коррекции 3, блок формирования значений матрицы 4, блок управления 5, блок пороговых устройств 6, блок формирования значений индикаторов 7, генератор тактовых импульсов 8, элемент ЗАПРЕТ 9, блок элементов И 10, блок памяти 11, дешифратор 12, блок задания времени 13, элемент ИЛИ 14, блок повышения достоверности 15 и позволяет с высокой достоверностью моделировать управляемые полумарковские цепи с учетом управляющих воздействий и динамически изменяемых пороговых значений (границ) состояний, задаваемых как количественно, так и качественно, недостоверно (недостаточно, неполно) за счет последовательного сравнения (по количеству разрядов) поступающих в двоичном коде исходных данных, принятия решения об их математической природе и трансформирования в блоке 15 исходных данных, заданных недостоверно (неполно) к виду, пригодному для осуществления процедуры параметрического моделирования. 2 з.п. ф-лы, 6 ил.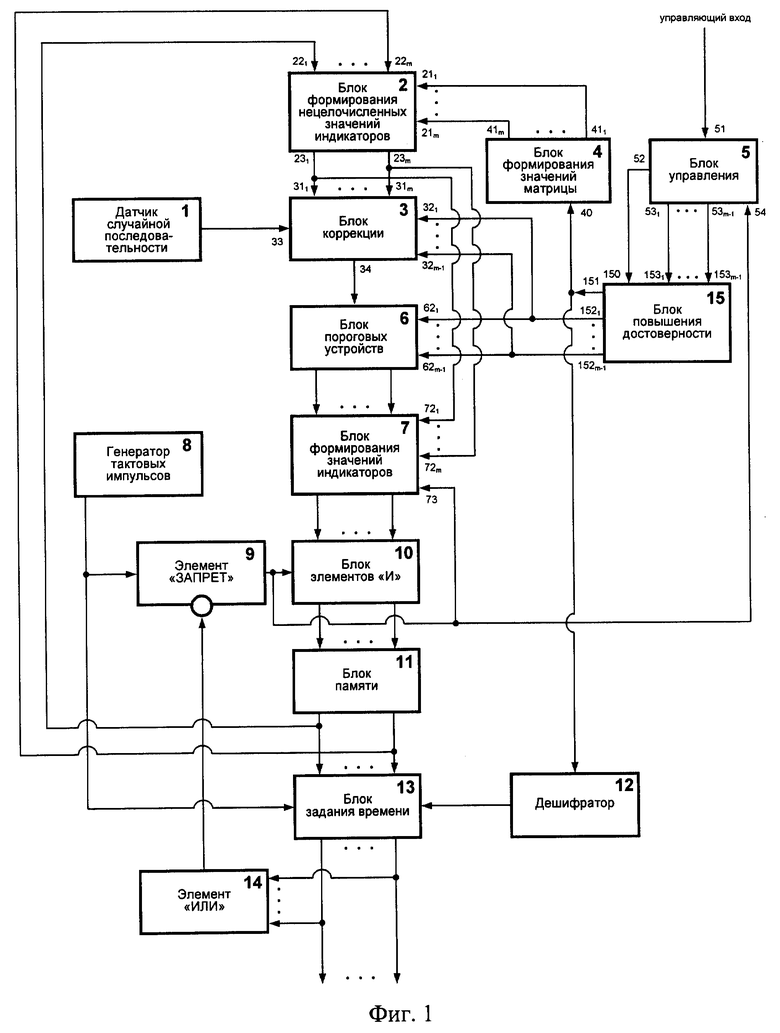
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 1998 |
|
RU2139569C1 |
| Автономный вероятностный автомат | 1978 |
|
SU734701A1 |
| Вероятностный автомат | 1977 |
|
SU645162A1 |
| Вероятностный автомат | 1982 |
|
SU1045232A1 |
| Вероятностный автомат | 1988 |
|
SU1608684A1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2001 |
|
RU2195697C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 1994 |
|
RU2099781C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2000 |
|
RU2169944C1 |
| US 5737254, A, 07.04.1998 | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| ВИБРОИЗОЛЯТОР РЕЗИНОВЫЙ ДЛЯ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ | 2006 |
|
RU2303720C1 |

