Изобретение относится к области вычислительной техники и радиотехники и предназначено для использования в комплексах автоматизированных систем управления военными сетями спутниковой связи с радио-АТС Единой системы спутниковой связи второго этапа развития (УССС-2)
Известен автономный вероятный автомат, содержащий генератор тактовых импульсов, два генератора случайных импульсов, два блока элементов И, три регистра, блоки задания закона распределения и памяти (см. авт. св. СССР N 734701, G 06 F 15/20, 1980, бюл.18).
Однако данный вероятностный автомат моделирует однородную цепь Маркова, что сужает его функциональные возможности.
Известен вероятный автомат, содержащий генератор пуанссоновского потока импульсов, генератор тактовых импульсов, элемент И, регистр, блоки задания закона распределения, элементов И и памяти (см. авт. св. СССР N 645162, G 06 F 15/20, 1979).
Однако известный вероятностный автомат моделирует цепь Маркова, в которой переход из состояния в состояние не зависит от времени пребывания в предыдущем состоянии, что ограниивает функциональные возможности автомата.
Наиболее близким по технической сущности к заявляемому устройству (прототипом) является вероятностный автомат (см. авт. св. СССР N 1045232, G 06 F 15/36, 1983, бюл.36), содержащий генератор тактовых импульсов, элементы И и ИЛИ, регистр сдвига, блока памяти и задания времени.
Недостатком прототипа является то, что выбор состояния регистром сдвига производится без учета внешних управляющих воздействий, вследствие чего вероятностный автомат не может моделировать управляемые цепи Маркова, что исключает его применение для анализа реальных сетей связи. Данный вероятностный автомат позволяет моделировать неуправляемые полумарковские цепи, в то время как большинство процессов, реально протекающих в сетях спутниковой связи (СС) с радио-АТС ECCC-2, являются управляемыми. Реализация управляющих воздействий приводит к изменению вероятностно-временного механизма процесса перехода системы из одного состояния в другое. Например, ограничение доступа абонентов к радиоресурсу ретранслятора или же ограничение их по времени информационного обмена, вводимые при резком возрастании пользовательского трафика с целью предотвращения перегрузки сети СС с радио-АТС, приводит к изменению вероятности перегрузки сети и времени ее пребывания в нормальном состоянии.
Кроме того, анализируя процесс без учета шумов наблюдения, устройство -прототип не позволяет моделировать марковские цепи на основе гауссовских последовательностей, являющихся наиболее общей моделью вероятности процессов, реально протекающих в системе связи (с учетом канальных шумов, шумов трактов приема и т.п.). Моделирование марковских последовательностей на основе гауссовских процессов позволяет использовать для проверки правильности принимаемых решений наиболее мощные из известных в настоящее время методов оптимизации методов, основанных на принципе оптимальности Беллмана и принципе максимума Понтрягина [1, 2, 3]
Целью предлагаемого изобретения является создание управляемого вероятностного автомата с расширенными функциональными возможностями за счет обеспечения моделирования управляемых полумарковских цепей, формируемых на основе гауссова представления процессов, реально протекающих в системе связи.
Указанная цель достигается тем, что в известный вероятностный автомат, содержащий генератор тактовых импульсов, элементы И и ИЛИ, блоки элементов И, памяти, задания времени, дополнительно введены датчик случайной последовательности, блоки формирования корректирующей последовательности, коррекции, формирования значений элементов матрицы, формирования значений индикаторов, управления и дешифратор. Выход генератора тактовых импульсов подключен к прямому входу элемента И и первому входу блока задания времени, выход элементы И соединен с входом блока элементов И, с синхронизирующим входом блока формирования значений индикаторов и с вторым входом устройства управления. Группа выходов блока элементов И соединена с входами блока памяти, группа выходов которого соединена с группой входов блока задания времени, группа выходов которого подключена к входам элемента ИЛИ и является выходами устройства. Выход элемента ИЛИ соединен с инверсным входом элемента И, выход датчика случайной последовательности подключен к первой группе входов блока коррекции, группа выходов которого соединена с первой группой входов блока формирования значений индикаторов. Вторая группа входов блока коррекции подключена к группе выходов блока формирования корректирующей последовательности. Группа выходов блока формирования значений элементов матрицы параллельно подключена к группе входов блока формирования корректирующей последовательности, к третьей группе входов блока коррекции и к второй группе входов блока формирования значений индикаторов. Выход блока управления соединен с входом блока формирования значений элементов матрицы и с входом дешифратора. Группа выходов блока формирования значений индикаторов соединена с группой входов блока элементов И. Третья группа входов блока формирования значений индикаторов соединена с группой выходов блока памяти. Выход дешифратора подключен к второму входу блока задания времени. Первый вход блока управления является входом управляемого вероятностного автомата.
Блок формирования корректирующей последовательности состоит из групп умножителей, сумматоров, решающего устройства, вычислителя корректирующей последовательности. Группа входов блока формирования корректирующей последовательности соединена с первыми входами умножителей, выходы которых соединены с входами сумматоров. Выходы сумматоров параллельно подключены ко вторым входам умножителей и к входам решающего устройства, выходы которого соединены с входами вычислителя корректирующей последовательности. Выходы вычислителя корректирующей последовательности являются выходами блока формирования корректирующей последовательности.
Блок коррекции состоит из групп сумматоров и умножителей на два. Первая группа входов блока коррекции подключена к первым входам сумматоров. Вторая группа входов блока коррекции подключена к первым входам умножителей на два, ко вторым входам которых подключена третья группа входов блока коррекции. Выходы умножителей на два соединены с вторыми входами сумматоров, выходы которых являются выходами блока коррекции.
Блок управления состоит из постоянного запоминающего устройства (ПЗУ) и счетчика обращения к ПЗУ. Первый вход ПЗУ является первым входом блока управления. Второй вход блока управления подключен к первому входу счетчика обращений к ПЗУ, выход которого подключен ко второму ПЗУ. Второй вход счетчика обращений к ПЗУ соединен с первым выходом ПЗУ, второй выход которого является выходом блока управления.
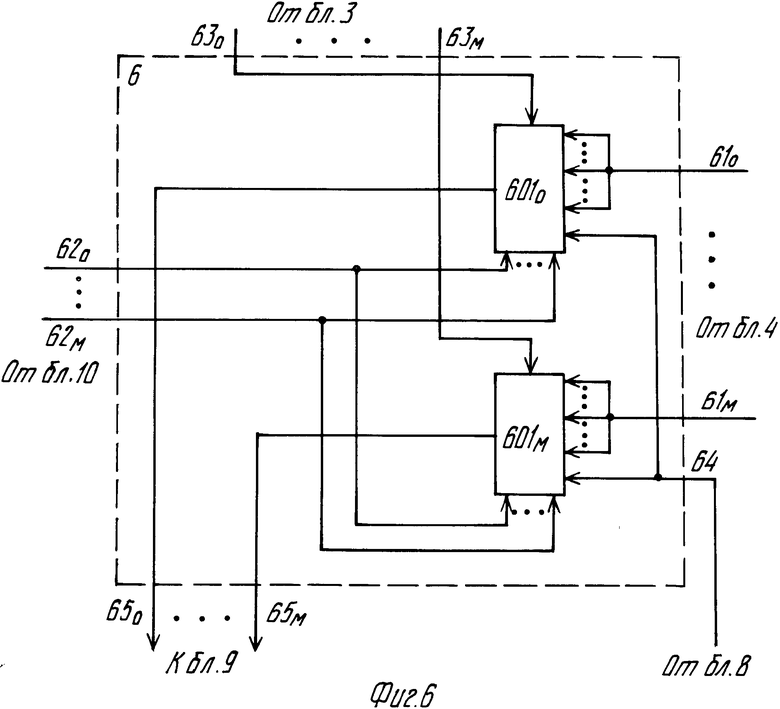
Блок формирования значений индикаторов состоит из группы вычислителей значений индикаторов. Первая и вторая группа входов каждого из вычислителей значений индикаторов являются первой и второй группой входов блока формирования значений индикаторов, каждый вход третьей группы входов которого является третьим входом каждого из вычислителей значений индикаторов. К четвертому входу каждого из вычислителей значений индикаторов подключен четвертый вход блока формирования значений индикаторов. Выход каждого из вычислителей значений индикаторов образуют группу выходов блока формирования значений индикаторов.
Принцип создания предлагаемого управляемого вероятностного автомата основан на известных результатах теории марковских процессов и теории переменных состояния, когда процесс изменения состояний сети многоканальной радиосвязи (сети спутниковой связи с радио-АТС) можно представить в виде [1]
где C(kTcc) m, m 1, M матрица строка возможных значений X(k);  вектор индикаторов состояния процесса X(kTcc) [3] элементы которого принимают значения
вектор индикаторов состояния процесса X(kTcc) [3] элементы которого принимают значения
P((k+1)T, T, u) матрица переходных вероятностей процесса  учитывающая вводимые управления u,
учитывающая вводимые управления u,  вектор случайных дискретных по состоянию последовательностей возбуждения процесса
вектор случайных дискретных по состоянию последовательностей возбуждения процесса  с нулевым средним и единичной дисперсией,
с нулевым средним и единичной дисперсией,
Г(kTcc)=diag{2Pmm} матрица возбуждения процесса 
Tcc управляемый период смены состояния процесса X(kTcc).
Анализ выражений позволяет сделать вывод о технической возможности получения оценки состояния управляемого марковского процесса, наблюдаемого на фоне "белого" гауссовского шума.
Построение управляемого вероятностного автомата, на основе такого принципа работы, в отличие от прототипа, где моделируются неуправляемые марковские цепи, обладает преимуществом, так как существенно расширяет функциональные возможности вероятностного автомата, позволяя моделировать процессы, происходящие в управляемых сетях многоканальной радиосвязи, с учетом наличия шумов в каналах передачи управляющей информации.
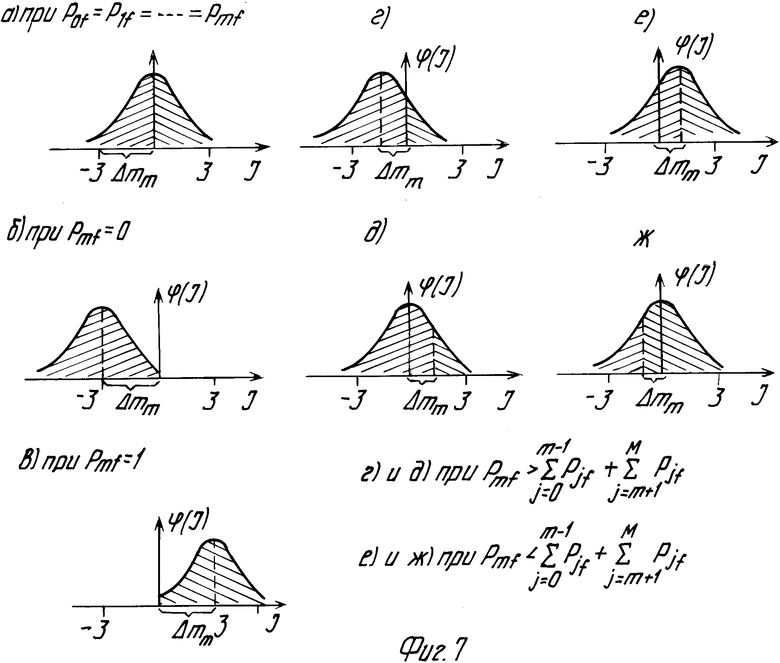
Заявленное устройство поясняется чертежами, где на фиг. 1, 2 - представлена структурная схема управляемого вероятностного автомата; на фиг. 3 структурная схема блока формирования корректирующей последовательности; на фиг. 4 структурная схема блока коррекции; на фиг. 5 структурная схема блока управления; на фиг. 6 структурная схема блока формирования значений индикаторов; на фиг. 7 вид плотности распределения вероятности управляющей последовательности Г(kTcc)  при различных значениях финальных вероятностей.
при различных значениях финальных вероятностей.
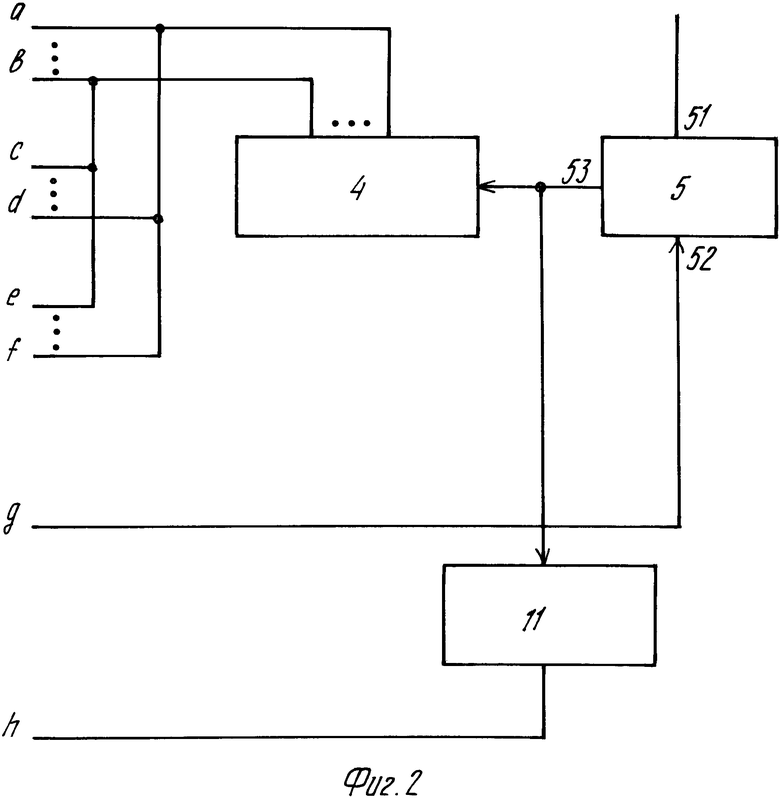
Вероятностный автомат, показанный на фиг. 1,2 состоит из датчика случайной последовательности 1, блока формирования корректирующей последовательности 2, блока коррекции 3, блока формирования значений матрицы 4, блока управления 5, блока формирования значений индикаторов 6, генератора тактовых импульсов 7, элемента И 8, блока элемента И 9, блока памяти 10, дешифратора 11, блок задания времени 12, элемента ИЛИ 13. Выход генератора тактовых импульсов 7 подключен к прямому входу элемента И 8 и первому входу блока задания времени 12. Выход элемента И 8 соединен с входом блока элементов И 9, с синхронизирующим входом 64 блока формирования значений индикаторов 6 и с вторым входом блока управления 5. Группа выходов блока элементов И 9 соединена с входами блока памяти 10, группа выходов которого соединена с группой входов блока задания времени 12, группа выходов которого подключена к входам элемента ИЛИ 13 и является выходами устройства. Выход элемента ИЛИ 13 соединен с инверсным входом элемента И 8. Выход датчика случайной последовательности 1 подключен к первой группе входов блока коррекции 3, группа выходов которого соединена с первой группой входов блока 6 формирования значений индикаторов. Вторая группа входов блока коррекции 3 подключена к группе выходов блока формирования корректирующей последовательности 2. Группа выходов блока формирования значений элементов матрицы 4 параллельно подключена к группе входов блока формирования корректирующей последовательности 2, к третьей группе входов блока коррекции 3 и к второй группе входов блока формирования значений индикаторов 6. Выход блока управления 5 соединен с входом блока формирования значений элементов матрицы 4 и с входом дешифратора 11. Группа выходов блока формирования значений индикаторов 6 соединена с группой входов блока элементов И 9. Третья группа входов блока формирования значений индикаторов 6 соединена с группой выходов блока памяти 10. Выход дешифратора 11 подключен к второму входу блока задания времени 12. Первый вход блока управления 5 является входом вероятностного автомата.
Блок формирования корректирующей последовательности 2 (фиг. 3) состоит из группы умножителей 201оо 201мм, группы сумматоров 202о 202м, решающего устройства 203, вычислителя корректирующей последовательности 204. Группа входов 21о 21м блока формирования корректирующей последовательности 2 соединена с первыми входами умножителей 201оо 201мм, выходы которых соединены с входами 22о 22м. Выходы сумматоров параллельно подключены ко вторым входам умножителей 201оо 201мм и к входам 23о - 23м решающего устройства 203, выходы которого соединены с входами 24о 24м вычислителя корректирующей последовательности 204. Выходы вычислителя корректирующей последовательности 204 являются выходами блока формирования корректирующей последовательности 2. Блок 2 реализуется в виде арифметического устройства, элементы которого известны и построены идентично приведенным в работах:
группа умножителей 210оо 201мм [4]
сумматоры 202о 202м Пяткин О.А. Проектирование микроэлектронных цифровых устройств. -М. Сов. Радио, 1977, с. 123, рис. 4.12;
решающее устройство 203 реализуется в виде конструктивного известного компаратора, описанного в книге Сидорова А.И. и Лебедева О.И. Импульсные и цифровые устройства. -Л. BAC, 1980, с. 34, рис.19;
вычислитель корректирующей последовательности 204 реализуется в виде универсального арифметико -логического устройства описанного в [5]
Блок коррекции 3, представленный на фиг. 4, состоит из группы сумматоров 301о 301м и группы умножителей на два 302о - 302м. Первая группа входов 31о 31м блока коррекции 3 подключена к первым входам сумматоров 301о 301м. Вторая группа входов 32о 32м блока коррекции 3 подключена к первым входам умножителей на два 302о 302м, ко втором входам которых подключена третья группа входов 34о 34м блока коррекции 3. Выходы умножителей на два 302о 302м соединены с вторыми входами сумматоров, 301о 301м выходы которых 33о - 33м является выходами блока коррекции 3. Технически сумматоры 301о 301м и умножители 302о 302м реализуются аналогично сумматорам и умножителям блока формирования корректирующей последовательности 2.
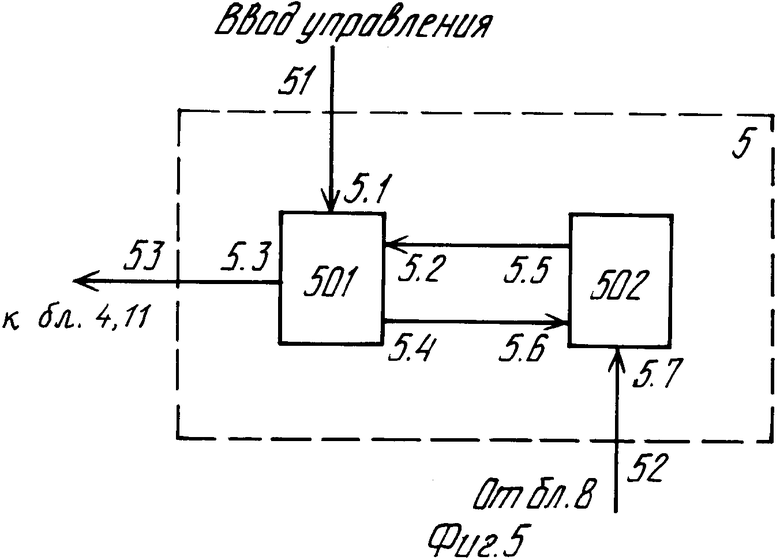
Блок управления 5, представленный на фиг. 5 состоит из постоянного запоминающего устройства 501 и счетчика обращения к ПЗУ 502. Первый вход ПЗУ 5.1 является первым входом 51 блока управления 5. Второй вход 52 блока управления 5 подключен к первому входу 5.7 счетчика обращений к ПЗУ 502, выход 5.5 которого подключен ко второму входу 5.2 ПЗУ 501. Второй вход 5.6 счетчика обращений к ПЗУ 502 соединен с первым выходом 5.4 ПЗУ 501, второй выход 5.3 которого является выходом 53 блока управления 5. Частый случай технической реализации ПЗУ 501 и счетчика обращений к ПЗУ 502 представлен в работе Соботка 3. Стары Я. Микропроцессорные системы. -М. Энергоиздат, 1981, с. 96-100.
Блок формирования значений индикаторов 6 (фиг. 6) состоит из группы вычислителей значений индикаторов 601о 601м. Первая 61о 61м и вторая 62о 62м группа входов каждого из вычислителей значений индикаторов 601о 601м являются первой и второй группой входов блока формирования значений индикаторов 6, каждый вход третьей группы входов 63о 63м которого является третьим входом каждого из вычислителей значений индикаторов 601о 601м. К четвертому входу каждого из вычислителей значений индикаторов параллельно подключен четвертый вход 64 блока формирования значений индикаторов 6. Выходы каждого из вычислителей значений индикаторов 601о 601м образуют группу выходов 65о 65м блока формирования значений индикаторов 6. Вычислители 601о 601м блока вычисления индикаторов 6 могут быть реализованы в виде универсальных АЛУ, известных и описанных в [5] или же на перемножителях, описанных в [4]
Датчик случайной последовательности 1, входящий в общую структурную схему, может быть реализован в виде известного и описанного в [6, с. 42, рис. 25]
Блок формирования значений матрицы 4, входящий в общую структурную схему, реализуется в виде запоминающего устройства, аналогично описанному в книге Якубовского В. С. Аналоговые и цифровые интегральные микросхемы. -М. Сов. радио, 1979, с. 137, рис. 3.51.
Генератор тактовых импульсов 7, входящий в общую структурную схему, реализуется в виде известного и описанного в работе Благин И.А. Кудрявцев В.А. Илинюта Н. Ф. Передача дискретной информации и телеграфия. М. Транспорт и связь, 1971, с.203, рис. 203.
Элементы И 8, 9, и элемент ИЛИ 13, входящие в общую структурную схему, могут быть построены в соответствии с описанными в [6, с. 20-24, рис. 9,11]
Блок памяти 10, входящий в общую структурную схему, реализуется в соответствии с описанием, представленным в работе: Старос Ф.Г. Крайзнер Л.П. Интегральные запоминающие устройства. М. Энергия, 1973, с. 98, рис. 5.16.
Дешифратор 11, входящий в общую структурную схему, построен в виде известного и описанного в книге Шляпоберского В.И. Основы техники передачи дискретных сообщений, М. Связь, 1973, с. 152, рис. 3.43.
Блок задания времени 12, входящий в общую структурную схему, реализуется в виде таймера, аналогично описанному в работе Гольденберг А.М. Импульсные устройства, М. Радио и связь, 1981, с. 78, рис. 3.11.
Вероятностный автомат работает следующим образом. С выхода датчика случайной последовательности 1 значения случайной вспомогательной последовательности v' с нормальной плоскостью распределения в двоичном коде поступают на вход блока коррекции 3. В блоке 2 формируются значения корректирующих последовательностей в соответствии с правилом "трех сигм", изложенном в работе Корн Г. Корн Т. Справочник по математике для научных работников и инженеров. Определения. теоремы. формулы. М. Наука, 1984, - 833 с.

где pmf финальная вероятность нахождения автомата в m м состоянии, определяемая с заданной точностью блоком 2 при аппаратурной реализации уравнения Колмогорова-Чепмена:  Блок формирования корректирующей последовательности 2 может быть реализован по схеме, представленной на фиг. 3. Формирование корректирующей последовательности производится следующим образом. Группы умножителей 201о 201м и группа сумматоров 202о 202м реализуют уравнение Колмогорова -Чепмена:
Блок формирования корректирующей последовательности 2 может быть реализован по схеме, представленной на фиг. 3. Формирование корректирующей последовательности производится следующим образом. Группы умножителей 201о 201м и группа сумматоров 202о 202м реализуют уравнение Колмогорова -Чепмена:  по значениям элементов матрицы переходных вероятностей (ПВ), поступающих в двоичном коде с выходов блока 4, и значениями
по значениям элементов матрицы переходных вероятностей (ПВ), поступающих в двоичном коде с выходов блока 4, и значениями  вычисленных на предыдущем шаге. При достижении (с заданной для автомата точностью) вектором вероятностей своих финальных значений
вычисленных на предыдущем шаге. При достижении (с заданной для автомата точностью) вектором вероятностей своих финальных значений  решающее устройство 203 подает на входы 24о 24м вычислителя значений корректирующей последовательности 204 значения финальных вероятностей М возможных состояний автомата. В вычислителе 204 осуществляется сравнение значений финальных вероятностей и формируются значения корректирующей последовательности в соответствии с (3).
решающее устройство 203 подает на входы 24о 24м вычислителя значений корректирующей последовательности 204 значения финальных вероятностей М возможных состояний автомата. В вычислителе 204 осуществляется сравнение значений финальных вероятностей и формируются значения корректирующей последовательности в соответствии с (3).
В блоке 3 по значениям корректирующих последовательностей производится коррекция математического ожидания (МО) последовательности v' в соответствии с условиями, определяемыми принятой моделью (2). В блоке 3 осуществляется также коррекция дисперсии последовательности v' в соответствии с правилом Гm=2Pmm, определяемым моделью (2). Блок коррекции 3 может быть реализован по схеме, представленной на фиг. 4. Коррекция МО и дисперсии последовательности v' производится следующим образом. Значения корректирующей последовательности поступают на входы 31о 31м группы сумматоров 301о 301м, на другой вход сумматоров поступают с умножителей 302о 302м откорректированные по дисперсии в соответствии с правилом Гm=2Pmm значения Гmv' вспомогательной последовательности v'. Значения Pmm поступают на входы 32о 32м с выходов блока 4. На выходах сумматоров 301о - 301м имеем значения откорректированных последовательностей ГmVm. Примеры функций распределения откорректированных последовательностей при различных значениях финальных вероятностей представлены на фиг. 7.
С выходов блока 3 значения откорректированной вспомогательной последовательности  поступают на группу входов блока формирования значений индикаторов 6. В блок 6 с группы выходов блока памяти 10 также поступают значения индикаторов состояния на предыдущем интервале смены состояния автомата θo(kTcc)-θм(kTcc) В моменты выхода автомата из предыдущего состояния в блоке 6 по значениям откорректированной вспомогательной последовательности и значениям индикаторов на предыдущем интервале вычисляются значения индикаторов на следующий период Tcc по соответствующему модели (2) выражению
поступают на группу входов блока формирования значений индикаторов 6. В блок 6 с группы выходов блока памяти 10 также поступают значения индикаторов состояния на предыдущем интервале смены состояния автомата θo(kTcc)-θм(kTcc) В моменты выхода автомата из предыдущего состояния в блоке 6 по значениям откорректированной вспомогательной последовательности и значениям индикаторов на предыдущем интервале вычисляются значения индикаторов на следующий период Tcc по соответствующему модели (2) выражению
Блок вычисления значений индикаторов 6 может быть реализован по схеме, представленной на фиг. 6. Вычисление значений индикаторов производится следующим образом. Вычислители 601о 601м значений индикаторов по значениям откорректированных последовательностей ГmVm, поступающих на входы 63о 63м, по значениям индикаторов предыдущего состояния автомата, поступающих на группу входов 62о - 62м с выходов блока 10, и по значениям элементов матрицы ПВ, поступающих на входы 61о 61м от блока 4, в момент появления синхронизирующего импульса на входе 64 реализуют расчет значений М индикаторов в соответствии с выражением (4).
Моменты выхода автомата из предыдущего состояния определяются тактовым генератором 7, элементом ИЛИ 13, элементом И 8 при формировании нулевой комбинации на выходе блока задания времени 12. С помощью блока элементов И 9 производится запись вычислительных значений индикаторов θo(kTcc)-θM(kTcc) в блок памяти 10, где реализуется их хранение до момента истечения периода смены состояния Tcc. Период смены состояния определяется блоком задания времени 12 по значениям кода, формируемого блоком управления 5. При этом значения кода с выхода блока управления 5 преобразуются дешифратором 11 в код, соответствующий значению Tcc, записываются в реверсивный счетчик блока 12 и считываются тактовым генератором 7 до момента появления нулевой комбинации на выходе блока 12, свидетельствующей об истечении времени пребывания автомата в данном состоянии. Управление вероятностно-временным механизмом смены состояний автомата производится сменой значений элементов матрицы переходных вероятностей на выходах блока формирования значений матрицы 4, осуществляемого по управляющим кодовым комбинациям, поступающим с выхода блока управления 5 в моменты выхода автомата из предыдущего состояния. Коррекция значения периода смены состояний, соответствующего формируемой на следующий шаг (k+1)Tcc матрице ПВ, как было отмечено выше, производится также по значениям управляющей кодовой последовательности, формируемой блоком 5.
Блок управления 5 представляет собой куб постоянной памяти, в котором записана программа работы устройства и может быть реализован по схеме, представленной на фиг. 5. Формирование управляющей кодовой последовательности производится следующим образом. С внешнего источника через вход 51 блока управления 5 на вход 5.1 ПЗУ 501 производится запись в двоичном коде значений элементов матрицы ПВ, соответствующей вводимому управлению, в ячейки памяти ПЗУ 501. Отсчеты моментов выхода автомата из предыдущего состояния поступают от элемента И 8 через вход 52 блока управления 5 на вход 5.7 счетчика обращений к ПЗУ 502 и определяют, поступая из выхода 5.5 счетчика на вход 5.2 ПЗУ 501, момент начала считывания значений элементов хранящейся в ПЗУ 501 новой матрицы ПВ в виде двоичного кода через выход 53 блока управления 5 в блок формирования значений индикаторов 4 и в дешифраторов 11. С выхода 5.4 ПЗУ 501 на вход 5.6 счетчика обращений к ПЗУ 502 в момент считывания матрицы ПВ, поступает сигнал, сбрасывающий значения счетчика 502 и дающий команду счетчика 502 начать новый отсчет для вновь введенного управляющего воздействия.
Значения элементов матрицы поддерживаются постоянными на выходах блока 4 в течение цикла управления и служат для реализации вычислений по выражениям (3), (4).
В итоге, на выходах блока 12 имеем, записанные в двоичном коде значения индикаторов состояния управляемого вероятностного автомата в каждый из моментов времени (определяемых генератором тактовых импульсов 7), с учетом введенного управляющего воздействия.
Таким образом, из анализа принципа работы очевидно, что заявляемый вероятностный автомат, наряду с сохраненными возможностями моделирования неуправляемых полумарковских цепей, способен моделировать управляемые вероятностные процессы, реально протекающие в сетях радио-АТС ECCC-2, позволяет на своей основе проводить верификацию решений, принимаемых в контуре управления системой СС, что существенно расширяет функциональные возможности аппаратуры, где заявленный вероятностный автомат будет использован.
Источники информации
1. Сэйдж Э, Мелс Дж. Теория оценивания и ее применение в связи и управлении. М. Связь, 1976, 496 с.
2. Сэйдж Э. Уайт Ч. Оптимальное управление системы. М. Радио и связь, 1982, 92 с.
3. Segall A. Optimal Control of Noise Finit State Markov Process IEEE Trans. Automat Contr. 1977, v. 22, N 2, p. 179-186;
4. Паперков А.А. Логические основы ЦВТ. М. Связь, 1973, с. 203, рис. 4;
5. Дроздов Е.А. Комарницкий В.А. Пятибратов А.П. ЭВМ ЕС. -М. Машиностроение, 1981, с. 158-170.
6. Мальцева Л.А. Франберг Э.М. Ямпольский В.С. Основы цифровой техники. М. Радио и связь, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 1998 |
|
RU2139569C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2001 |
|
RU2195697C1 |
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА | 1995 |
|
RU2099837C1 |
| УСТРОЙСТВО ДЛЯ ВЕРОЯТНОСТНОГО МОДЕЛИРОВАНИЯ ПРОЦЕССА ФУНКЦИОНИРОВАНИЯ И ОПТИМАЛЬНОЙ ОЦЕНКИ СОСТОЯНИЯ ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ | 2020 |
|
RU2759253C1 |
| ГЕНЕРАТОР БЕЛОГО ШУМА (ВАРИАНТЫ) | 1997 |
|
RU2120179C1 |
| УСТРОЙСТВО ДЛЯ ВЕРОЯТНОСТНОГО МОДЕЛИРОВАНИЯ ПРОЦЕССА ФУНКЦИОНИРОВАНИЯ ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ | 2020 |
|
RU2756883C1 |
| УСТРОЙСТВО ДЛЯ СТОХАСТИЧЕСКОГО И НЕЧЁТКОГО МОДЕЛИРОВАНИЯ ПРОЦЕССА ФУНКЦИОНИРОВАНИЯ ПЕРСПЕКТИВНЫХ ТЕЛЕКОММУНИКАЦИОННЫХ СЕТЕЙ | 2021 |
|
RU2773870C1 |
| ЦИФРОВОЙ РАДИОПЕЛЕНГАТОР | 1997 |
|
RU2115135C1 |
| СПОСОБ ОЦЕНИВАНИЯ НЕСУЩЕЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100812C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1994 |
|
RU2090960C1 |


Изобретение относится к области вычислительной техники и радиотехники и предназначено для использования в комплексах автоматизированных систем управления сетями спутниковой связи. Целью изобретения является создание управляемого вероятностного автомата с расширенными функциональными возможностями за счет обеспечения моделирования управляемых полумарковских цепей, формируемых на основе гауссова представления процессов, реально протекающих в управляемой системе связи. Вероятностный автомат содержит датчик случайной последовательности 1, блок формирования корректирующей последовательности 2, блок коррекции 3, блок формирования значений матрицы 4 переходных вероятностей, блок управления 5, блок формирования значений индикаторов 6, генератор тактовых импульсов 7, элемент И 8, блок элементов И 9, блок памяти 10, дешифратор 11, блок задания времени 12 и элемент ИЛИ 13. 4 з.п. ф-лы, 7 ил.
| Автономный вероятностный автомат | 1978 |
|
SU734701A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Вероятностный автомат | 1977 |
|
SU645162A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Вероятностный автомат | 1982 |
|
SU1045232A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
