Изобретение относится к области приборостроения, а именно к обеспечению временной привязки информации в автономных информационно-измерительных системах, например донных геофизических станциях.
Известны автономные донные геофизические станции (см. Гуцалюк В.М. и др. Автономная донная геофизическая станция// Геофизический журнал, 1979, №3. T.1), в которых временная привязка регистрируемой информации осуществляется с помощью хронирующего устройства с термостатированным кварцевым генератором. Однако такие устройства потребляют значительное количество энергии питания, что ограничивает срок автономной работы станции. В настоящее время потребление питания термостата оказывается больше, чем потребление всех остальных устройств станции, собранных на современных электронных элементах.
Известно хронирующее устройство (Патент США №6472943, 29 окт. 2002 г.), являющееся прототипом предлагаемого устройства и содержащее кварцевый генератор, совмещенный с датчиком температуры, эталон частоты (GPS), контроллер и синтезатор частоты. Контроллер включает микропроцессор, умножитель частоты, компаратор, пропорциональный интегратор и блок формирования поправки частоты.
Способ хронирования на основе этого устройства выглядит следующим образом. Заранее определяют зависимость частоты кварцевого генератора от температуры (в виде полинома третьей степени) и от времени (в виде линейной функции). Коэффициенты этих функций записывают в память микропроцессора. Сигналы от GPS и от кварцевого генератора через умножитель частоты подают на компаратор, с выхода которого сигнал сравнения через пропорциональный интегратор подается на блок формирования поправки частоты. Сигналы от датчика температуры и от кварцевого генератора подаются на микропроцессор, с выхода которого управляющий сигнал поступает также на блок формирования поправки частоты. С выхода блока формирования поправки частоты сигналы поступают на синтезатор, в котором формируется выходной сигнал устройства. В те моменты времени, когда имеется связь со спутником и сигнал от GPS поступает в контроллер, в нем в режиме реального времени происходит сравнение опорной частоты с сигналом GPS и вырабатывается частотная поправка, компенсирующая расхождение сигналов. Одновременно производится уточнение коэффициентов температурной и временной зависимости. В моменты времени, когда сигналы от GPS отсутствуют, по сигналам от датчика температуры и известным коэффициентам температурной и временной зависимости вычисляется поправка частоты кварцевого генератора, которая формируется блоком формирования поправки частоты. При этом используют экстраполяцию результата вычисления частоты на следующий временной интервал. Поскольку описанный способ основан на цифровой элементной базе, он включает операции временного кодирования частоты и ввода кода времени в память контроллера и микропроцессора.
Недостаток этого устройства и способа хронирования на основе его состоит в том, что прототип предполагает вырабатывание стабильного частотного сигнала непрерывно в режиме реального времени. В результате этого устройство содержит большое количество энергопотребляющих элементов (быстродействующий микропроцессор, умножитель, блок формирования поправки частоты, синтезатор частоты), что приводит к существенным энергетическим затратам. Такое устройство далеко не всегда применимо в автономных системах, в которых экономия энергии является очень актуальной. Кроме того, описываемое устройство предполагает коррекцию поправок временного дрейфа на небольших отрезках времени и неэффективно, т.е. дает большую погрешность хронирования процесса, если сеанс разрыва связи с GPS велик.
Задача, которую ставит перед собой предлагаемое изобретение, состоит в повышении точности временной привязки информации автономной информационно-измерительной системы (АИИС) и снижении энергопотребления автономной частью системы.
Поставленная задача достигается тем, что в устройство хронирования информации автономной информационно-измерительной системы, например донной геофизической станции, содержащее опорный генератор тактовых импульсов, дополнительный генератор термозависимых тактовых импульсов, микропроцессор и эталон частоты, например GPS, введен компьютер, а, по крайней мере, микропроцессор, опорный генератор и дополнительный генератор помещены в автономный контейнер, при этом в микропроцессоре реализованы кодировщик, цифровой регистратор, делитель частоты и управляемый счетчик импульсов, счетный вход которого соединен с выходом опорного генератора, а вход управления - с выходом делителя частоты, выход счетчика подключен к одному из входов регистратора, вход кодировщика подключен к опорному генератору, а выход - к другому входу регистратора, выход опорного генератора соединен с тактовым входом регистратора, а компьютер имеет порты для подключения эталона частоты, выхода регистратора и шины управления регистратора.
Поставленная задача достигается также двумя вариантами способа хронирования информации посредством описанного выше устройства. По первому варианту способа, включающему операции предварительного определения зависимости частоты опорного генератора F от частоты дополнительного генератора f и занесения этой зависимости в память микропроцессора или компьютера, временного кодирования частоты F и ввода кода времени в регистратор микропроцессора, вычисления поправок времени опорного генератора по частоте f и сигналам эталона частоты, зависимость частоты F от частоты f заносят в память микропроцессора или компьютера в виде зависимости F(F/f), а перед началом сеанса автономной работы подключают эталон частоты к компьютеру, синхронизируют начало работы опорного генератора по эталону частоты и отключают эталон частоты от компьютера, затем в течение сеанса в каждом i-м интервале времени по частоте дополнительного генератора, определяют отношение частот Fi/fi и записывают его в цифровой регистратор, считывают из регистратора значения Fi/fi и соответствующие коды времени, по которым и по зависимости F(F/f) вычисляют с помощью компьютера поправленные по температуре значения времени i-го интервала, после окончания сеанса компьютер подключают к эталону частоты и определяют временные поправки по разности между поправленным по температуре временем последнего интервала устройства и временем эталона частоты с использованием интерполяции, например линейной.
По второму варианту способа хронирования информации, включающему операции предварительного определения зависимости частоты опорного генератора F от частоты дополнительного генератора f и занесения этой зависимости в память микропроцессора или компьютера, временного кодирования частоты F и ввода кода времени в регистратор микропроцессора, вычисления поправок времени опорного генератора по частоте f и сигналам эталона частоты, зависимость частоты F от частоты f заносят в память микропроцессора или компьютера в виде зависимости F(F/f), а перед началом сеанса автономной работы подключают эталон частоты к компьютеру, компьютер к регистратору и синхронизируют начало работы опорного генератора по эталону частоты, отключают компьютер от регистратора, затем в течение сеанса в каждом i-том интервале определяют отношение Fi/fi и записывают его в цифровой регистратор, после окончания сеанса подключают компьютер к регистратору, считывают из регистратора значения Fi/fi и соответствующие коды времени, по которым и по уточненной зависимости F(F/f) вычисляют поправленные по температуре значения времени i-го интервала, и определяют временные поправки по разности между поправленным по температуре временем последнего интервала устройства и временем эталона частоты с использованием интерполяции, например линейной.
На прилагаемых чертежах:
На Фиг.1 представлена блок-схема предлагаемого хронирующего устройства АИИС.
На Фиг.2 приведена зависимость температуры автономного контейнера от времени в условиях имитации работы донной геофизической станции.
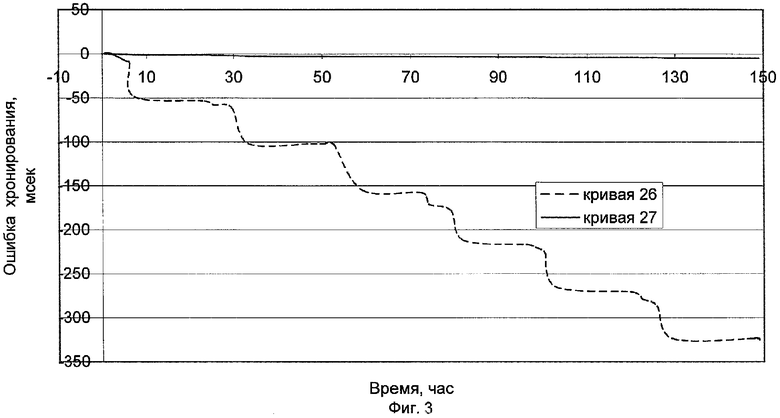
На Фиг.3 и 4 приведено временное распределение ошибки времени хронирования для различных режимов работы устройства.
На Фиг.1 представлен опорный генератор тактовых импульсов (ОГТИ) 1, дополнительный генератор тактовых импульсов (ДГТИ) 2, делитель частоты 3, управляемый счетчик импульсов 4, кодировщик 5, цифровой регистратор 6, компьютер 7, эталон частоты (времени) (GPS) 8, микропроцессор 9, выходы ОГТИ 10 (тактовые импульсы частотой F) и ДГТИ 11 (тактовые импульсы частотой f), счетный 12 и управляющий 13 входы счетчика импульсов 4, информационные входы 14 и 15 и вход 16 тактовых импульсов цифрового регистратора 6, управляющий вход 17 и информационный выход 18 цифрового регистратора, информационный вход 20 регистратора, порты компьютера 7: порт 19 для подключения эталонного сигнала от GPS, порт 21 для подключения шины управления регистратора к входу 17 и порт 22 для подключения к информационному выходу 18 регистратора, условные границы автономного контейнера 23 для устройства по первому способу (штрихпунктирная линия), 24 - условные границы автономного контейнера для устройства по второму способу (штриховая линия).
Предлагаемая АИИС устроена следующим образом. На базе микропроцессора 9 реализованы делитель частоты 3, управляемый счетчик импульсов 4 и кодировщик 5. Выход 10 ОГТИ параллельно подключен к счетному входу 12 счетчика 4, кодировщику меток времени 5 и тактовому входу 16 регистратора 6. Выход 11 ДГТИ подключен через делитель частоты 3 к управляющему входу счетчика импульсов 4, выход которого подключен к входу 14 регистратора. Выход кодировщика 5 подключен к информационному входу 15 регистратора. Компьютер имеет порты связи: порт 19 для подключения эталона частоты 8, порт 21 для подключения шины управления регистратора к входу 17 и порт 22 для подключения к информационному выходу 18 регистратора. Через вход 19 в цифровой регистратор 6 поступает измерительная информация, хронирование которой осуществляется данной системой.
При осуществлении способа хронирования по первому варианту (п.2 формулы изобретения) в автономный контейнер помещены ОГТИ 1, ДГТИ 2, микропроцессор 9, регистратор 6 и компьютер 7. Конструкция порта 19 компьютера в этом случае предусматривает оперативное подключение к нему (и отключение) эталона времени 8. При осуществлении способа хронирования по второму варианту (п.3 формулы изобретения) в автономный контейнер помещены ОГТИ 1, ДГТИ 2, микропроцессор 9 и регистратор 6. В этом случае конструкция входов-выходов 17 и 18 регистратора должна предусматривать оперативное подключение к нему (и отключение) компьютера 7. При этом эталон частоты 8 должен быть подключен к компьютеру.
Предлагаемое хронирующее устройство работает следующим образом. Опорный генератор 1 генерирует опорные тактовые импульсы. Дополнительный генератор 2 генерирует тактовые импульсы, температурная зависимость частоты которых выше по сравнению с температурной зависимостью частоты опорного генератора. С выхода 10 генератора 1 сигнал опорной частоты поступает на счетный вход счетчика 4, реализованного в микропроцессоре 9. С выхода 11 дополнительного генератора 2 сигнал термозависимой частоты поступает через делитель 3 на управляющий вход счетчика 4. С выхода счетчика 4 кодированный сигнал отношения частот Fi/fi поступает на вход 14 цифрового регистратора 6. На регистратор также поступают: на вход 15 код временных меток с выхода кодировщика 5, а на вход 16 тактовой частоты - сигнал опорной частоты. В результате периодически в микропроцессоре определяется отношение частот, и в кодированном виде передается в регистратор и записывается в нем с привязкой к i-му периоду времени.
При изготовлении и настройке АИИС производят определение калибровочной зависимости частоты F опорного генератора от частоты f дополнительного генератора F=F(f) во всем предполагаемом диапазоне изменения температуры. Используя эти данные, зависимость F(f) математически преобразуют в зависимость F(F/f), которую записывают в цифровой регистратор (или память компьютера).
Перед началом автономной работы АИИС подключают эталон частоты 8 к компьютеру 7 (по первому варианту способа) или компьютер 7 с подключенным эталоном частоты 8 к регистратору (по второму варианту), и от источника GPS через компьютер 7 в регистратор 6 вводят стартовое значение точного времени. Затем отключают либо эталон частоты от компьютера (по первому варианту), либо компьютер от регистратора (по второму варианту). С этого момента начинается работа системы в автономном режиме. Например, в случае донной геофизической станции опускают контейнер на дно океана и приступают к геофизическим исследованиям.
В автономном режиме регистратор работает с тактовой частотой F. В каждом i-м интервале времени импульсы с частотами Fi и fi поступают от опорного 1 и дополнительного 2 генераторов соответственно. С помощью делителя 3 частота импульсов fi делится в m раз. Операция деления необходима для увеличения времени счета тактовых импульсов, тем самым увеличивается чувствительность устройства к малым изменениям температуры.
Счетчик 4 находит число импульсов частоты Fi за период τ, где τ равно m/fi. Эта процедура эквивалентна определению отношения частот Fi и fi. Действительно, с помощью счетчика 4 определяется число периодов Тi частоты Fi за время τ, т.е. отношение τ/Ti=mFi/fi. Эти результаты вводятся в цифровой регистратор 6 и хранятся вместе с регистрируемыми данными. Одновременно с помощью кодировщика 5 определяется и записывается в регистратор код условного времени регистрации данных tyi, соответствующий текущей частоте ОГТИ. Параллельно через информационный вход 19 на регистратор 6 поступает текущая информация от измерительных приборов и датчиков (на фиг.1 и 2 они не показаны).
По первому варианту способа в i-е моменты времени из памяти регистратора считываются условное время регистрации данных tyi и значение ni=mFi/fi. По этим данным и заранее снятой и записанной в регистратор (или компьютер) табличной зависимости F=F(F/f) вычисляются последовательно вначале значения Fi=F(ni) опорной частоты, а затем уточненные по температуре значения каждого i-го интервала времени t'i по формуле

где k - номер конечного интервала. При этом промежуточные табличным значения F(nj) уточняются путем интерполяции.
После окончания сеанса автономной работы эталон частоты подключается к компьютеру, от эталона частоты вводится точное время tк, соответствующее окончанию регистрации, определяется разница между точным (эталонным) tк и вычисленным t'k конечными временами регистрации и путем интерполяции вводятся временные поправки во все i-е моменты времени.
При работе по второму варианту способа после окончания сеанса и введения точного времени tк из памяти регистратора в компьютер считываются массивы tyi, и ni=mFi/fi. По этим данным и заранее снятой и записанной в регистратор (или компьютер) табличной зависимости F=F(F/f) вычисляются уточненные по температуре значения каждого i-го интервала времени t'i по формуле (2). После окончания сеанса автономной работы компьютер с подключенным к нему эталоном частоты подключается к регистратору, от эталона частоты вводится точное время tк, соответствующее окончанию регистрации, и по тому же алгоритму, что в случае первого способа хронирования, определяются временные поправки в i-е моменты времени.
В случае использования линейной интерполяции формула вычисления временных поправок для обоих вариантов способа хронирования имеет вид:

При работе устройства по первому варианту компьютер помещен в автономный контейнер. В некоторых случаях он для уменьшения потребления энергии может быть переведен в ждущий режим с пониженным потреблением. При этом он переключается на режим вычислений каждый раз, когда изменение температуры (т.е. отношения Fi/fi) превысит некоторое минимальное наперед заданное пороговое значение. В этом случае он определяет температурную поправку к опорной частоте и i-му значению времени. Момент изменения температуры определяется либо в микропроцессоре 9, либо в компьютере в ждущем режиме. Компенсация дрейфа опорной частоты по первому способу осуществляется частично в режиме реального времени (температурные поправки), частично после окончания сеанса (поправки на временной и режимный дрейф). Такой режим оправдан в тех случаях, когда изменение температуры в течение автономного режима незначительно. Это имеет место, например, в случае донной геофизической станции, автономный контейнер которой лежит на дне океана при температуре около 0°С, а изменения температуры обычно находятся в пределах ±0,01°С и менее.
При работе по второму варианту компьютер находится вне контейнера. В этом случае потребление энергии минимально, а результаты хронирования получаются путем вычислений на основе сохраненных в регистраторе данных после окончания сеанса (поправки на температурный дрейф и на временной и режимный дрейф).
В некоторых случаях перед введением стартового значения времени юстируют зависимость F(F/f). Для этого, используя сигналы эталона частоты, определяют начальную частоту F0 опорного генератора и начальное значение отношения F0/f0, по которым уточняют зависимость F(f) и F(F/f). Эту операцию проводят, когда операция калибровки давно не проводилась, а температурный режим условий, в которых юстировка производится, достаточно стационарен.
Положительный эффект от использования предлагаемого технического решения достигается тем, что при вычислении температурных поправок используется экономичный режим определения текущего значения температуры по отношению частот F/f. Нетрудно видеть, что отношение F/f с высокой точностью (до температурных изменений частоты F, составляющих несколько миллионных долей) пропорционально периоду частоты f. Поэтому зависимость F(F/f) эквивалентна зависимости F(Tf), где Tf - период частоты f.
Введение эталона частоты в систему и использование его в неавтономной части системы дает возможность вводить временные поправки в хронирование без дополнительного потребления энергии источника автономной части системы. Эти поправки вносятся после проведения сеанса, что технически в большинстве случаев является вполне приемлемым.
Для проверки эффективности предлагаемого устройства и способа хронирования был проведен эксперимент, в котором имитировалась автономная работа образца предлагаемой системы. Контейнер системы, изготовленной по данному техническому решению, помещался в термокамеру, в которой поддерживался температурный режим, идентичный тому, который имеет место в случае донной геофизической станции. Зависимость изменения температуры в камере изображена на Фиг.2 (кривая 25 - зависимость температуры автономного контейнера от времени в условиях экспериментальной имитации работы донной геофизической станции). С момента начала автономного режима температура в течение 3-х часов снижалась с 21,5°С до 0°С (погружение станции), затем выдерживалась при температуре, близкой к 0°С, в течение 5 суток (работа на дне) и повышалась в течение 3-х часов до 23°С (подъем станции).
Результаты эксперимента приведены на графиках. На Фиг.3 показаны: кривая 26 - зависимость ошибки времени хронирования от текущего времени без использования дополнительного (термозависимого) генератора тактовых импульсов и без использования временной компенсации погрешности и кривая 27 - зависимость ошибки времени хронирования от текущего времени с использованием дополнительного генератора тактовых импульсов, но без использования временной компенсации погрешности. А на фиг.4 - кривая 28 - зависимость ошибки времени хронирования от текущего времени с использованием дополнительного генератора тактовых импульсов и временной компенсации погрешности - по предлагаемому техническому решению. Негладкий характер изменения ошибки хронирования объясняется несколькими факторами, среди которых влияние суточных циклов изменения температуры воздуха в помещении и дневные снятия замеров экспериментальных точек (периодические ступенчатые изменения), погрешность калибровочной зависимости F(F/f) и др.
Из графиков следует, что максимальная ошибка времени хронирования в случае, если не используется ни температурная, ни временная компенсации, составила в эксперименте 340 мсек. Использование температурной компенсации по дополнительному (термозависимому) генератору 2 снизило ошибку времени хронирования с 340 до 4,7 мсек, а использование эталона частоты по алгоритму предложенных способов снизило погрешность до 1 мсек.
При этом потребляемая мощность системы, реализованной по предлагаемому техническому решению, составила около 0,1 Вт, в то время как прототип потребляет около 0,5 Вт, а известные термостатированные кварцевые генераторы потребляют от 0,3 до 0,5 Вт.
Таким образом, эксперимент показал, что по сравнению с прототипом точность хронирования повышается практически на порядок, а потребляемая мощность снижается в несколько раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СЕЙСМИЧЕСКАЯ СТАНЦИЯ | 2004 |
|
RU2276388C1 |
| СИСТЕМА ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2008 |
|
RU2392643C2 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И КОРРЕКЦИИ ТАКТОВОЙ ЧАСТОТЫ АВТОНОМНОГО РЕГИСТРАТОРА СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2008 |
|
RU2366981C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМОЖНОСТИ НАСТУПЛЕНИЯ КАТАСТРОФИЧЕСКИХ ЯВЛЕНИЙ | 2011 |
|
RU2466432C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2455664C1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМОСИГНАЛОВ НА АКВАТОРИИ МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270464C1 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2331087C1 |


Изобретение относится к области приборостроения и может быть использовано для временной привязки информации систем. Достигаемый технический результат - повышение точности временной привязки информации автономной информационно-измерительной системы и снижение энергопотребления. Устройство содержит опорный генератор тактовых импульсов, генератор термозависимых тактовых импульсов, микропроцессор, который выполняет функции устройства кодирования времени, цифрового регистратора тактовых импульсов и поступающей в систему информации, делителя частоты опорного генератора тактовых импульсов и управляемого счетчика тактовых импульсов, эталон частоты и компьютер. По одному из вариантов способа поправленные по температуре значения времени i-го такта определяют в течение сеанса, по другому - после сеанса. 3 н.п. ф-лы, 4 ил.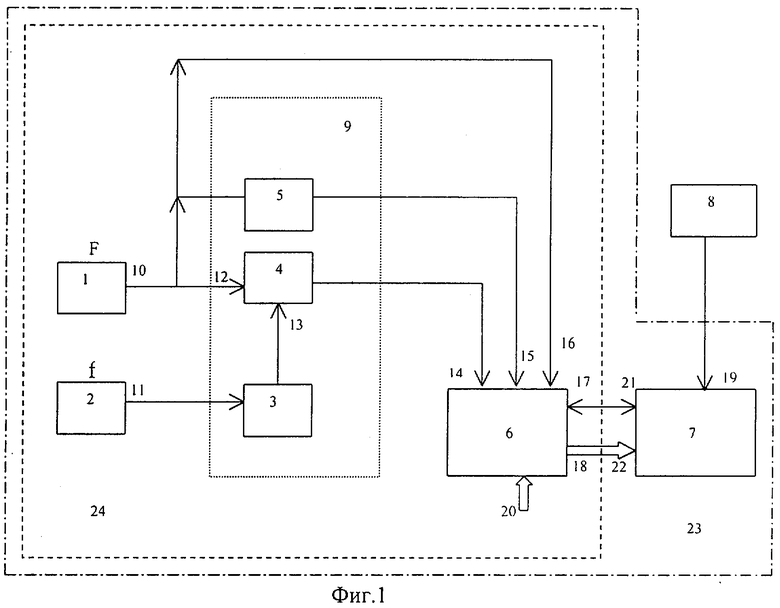
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Устройство контроля синхронизма блока фазовой автоподстройки частоты | 1977 |
|
SU732768A1 |
| Цифровой синтезатор частот с частотной модуляцией | 1988 |
|
SU1589388A1 |
| US 6211742 B1, 03.04.2001 | |||
| WO 00/27033 A1, 11.05.2000. | |||

