Предлагаемое изобретение относится к области медицины, в частности к механотерапевтическим аппаратам пассивного действия для восстановления функции суставов.
Известно устройство для восстановления подвижности суставов механотерапией, описанное в книге С.П. Миронова и Г.М. Бурмаковой "Повреждения локтевого сустава при занятиях спортом" Москва, Лесар-арт, 2000 г., стр.157, принятое за прототип. Данное устройство для восстановления функции суставов содержит неподвижную и подвижную платформы для фиксации сегментов конечностей, связанные между собой шарнирно и соединенные с валом электропривода, двигатель которого подключен к системе управления, состоящей из преобразователя с раздельным управлением знака и модуля скорости. Все данные существенные признаки присутствуют и в предлагаемом способе.
Недостатком известного устройства является то, что система регулирования позволяет управлять реверсом конечностей только уже в стадии ощущения пациентом боли. Это связано с тем, что сигнал об отрицательной - неправильной реакции мышц в силу достаточно большой передаточной цепочки - от мышцы, например, больной руки, через центральную нервную систему и мозг передается обратно в мышцу здоровой руки для включения реверса, а также инерционности механизмов. Болевые ощущения, а иногда и незначительные повреждения, вызывают у пациента боязнь лечения, что значительно увеличивает сроки восстановления функции сустава.
Предлагаемым изобретением решается задача создания устройства для восстановления функции суставов с системой управления, позволяющей проводить восстановление без возникновения болевых ощущений у пациента, проводя реверс привода еще на стадии возникновения отрицательной мышечной реакции.
Для достижения названного технического результата в устройстве для восстановления функции суставов, содержащем неподвижную и подвижную платформы для фиксации сегментов конечностей, связанные между собой шарнирно, при этом подвижная платформа соединена с электроприводом, двигатель которого подключен к системе управления, состоящей из преобразователя с раздельным управлением знака и модуля скорости, подвижная платформа соединена с электроприводом через дополнительную тягу посредством датчика сопротивления движению, а система управления дополнительно содержит датчик угла, оптимизатор угловой скорости, первый и второй триггеры Шмитта, задатчик предельного объема движений по углу, задатчик предельного момента сопротивления, генератор тактовых импульсов, а также логический блок, включающий коммутатор, триггер данных и логический элемент "ИСКЛЮЧАЮЩЕЕ ИЛИ", при этом выход датчика сопротивления движению подключен к функциональному входу первого триггера Шмитта, вход управления которого соединен с выходом задатчика предельного момента сопротивления, выход датчика угла, подсоединенного к шарниру, подключен к функциональному входу второго триггера Шмитта, управляющий вход которого соединен с задатчиком предельного объема движений по углу, выходы обоих триггеров Шмитта подключены ко входам логического блока, выходом соединенного со входом преобразователя, управляющим знаком скорости вращения, а вход преобразователя, управляющий модулем скорости, соединен с выходом оптимизатора угловой скорости, входом подключенного к датчику угла.
Отличительными признаками предложенного устройства являются наличие в самом устройстве дополнительной тяги и датчика сопротивления движению, через который она (дополнительная тяга) соединена с подвижной платформой, а в системе управления - датчика угла, оптимизатора угловой скорости, первого и второго триггеров Шмитта, задатчика предельного объема движений по углу, задатчика предельного момента сопротивления, генератора тактовых импульсов, а также логического блока, включающего коммутатор, триггер данных и логический элемент "ИСКЛЮЧАЮЩЕЕ ИЛИ", при этом выход датчика сопротивления движению подключен к функциональному входу первого триггера Шмитта, вход управления которого соединен с выходом задатчика предельного момента сопротивления, выход датчика угла, подсоединенного к шарниру, подключен к функциональному входу второго триггера Шмитта, управляющий вход которого соединен с задатчиком предельного объема движений по углу, выходы обоих триггеров Шмитта подключены ко входам логического блока, выходом соединенного со входом преобразователя, управляющим знаком скорости вращения, а вход преобразователя, управляющий модулем скорости, соединен с выходом оптимизатора угловой скорости, входом подключенного к датчику угла.
Благодаря наличию указанных отличительных признаков в совокупности с известными (указанными в ограничительной части формулы) достигается следующий технический результат - создано устройство для восстановления функции суставов с системой управления, позволяющей проводить восстановление без возникновения болевых ощущений у пациента, проводя реверс привода еще на стадии возникновения отрицательной мышечной реакции. При этом автоматически производится подбор скорости, при которой достигается максимальный объем движений. Кроме того, пациент, фактически задавая объем движения и область движения в суставе, обучается управлять напряжением и расслаблением мышц, за счет чего постепенно устраняется мышечная контрактура и увеличивается объем движения. Предложенное устройство позволяет осуществлять нетравмирующее воздействие на сустав, не требует специально обученного персонала и позволяет больному проводить сеансы восстановления самостоятельно.
В результате поиска по источникам патентной и научно-технической информации совокупность признаков, характеризующая предложенное устройство для восстановления функции суставов, не была обнаружена. Таким образом, предлагаемое устройство соответствует критерию охраноспособности "новое".
На основании сравнительного анализа предложенного устройства с известным уровнем техники по источникам научно-технической и патентной литературы можно утверждать, что между совокупностью признаков, в том числе и отличительных, и выполняемых ими функций и достигаемых целей неочевидная причинно-следственная связь. На основании вышеизложенного можно сделать вывод о том, что техническое решение не следует явным образом из уровня техники и, следовательно, соответствует критерию охраноспособности "изобретательский уровень".
Предложенное техническое решение может найти применение при восстановлении функций различных суставов с использованием механотерапевтических аппаратов пассивного действия.
Техническое решение поясняется функциональной схемой (см. чертеж).
Изображенное на схеме устройство для восстановления функции суставов содержит неподвижную 1 и подвижную 2 платформы для фиксации сегментов конечностей, связанные между собой через шарнир 3 и соединенные с валом электропривода 4, двигатель которого подключен к преобразователю 5 с раздельным управлением знака и модуля скорости, подвижная платформа 2 соединена с приводом 4 через дополнительную тягу 6 посредством датчика сопротивления движению 7, а система управления кроме преобразователя 5 дополнительно содержит датчик угла 8, оптимизатор угловой скорости 9, первый 11 и второй 10 триггеры Шмитта, задатчик предельного объема движений по углу 12, задатчик предельного момента сопротивления 13, генератор тактовых импульсов 14, а также логический блок 15, включающий коммутатор 16, триггер данных 17 и логический элемент "ИСКЛЮЧАЮЩЕЕ ИЛИ" 18.
Устройство работает следующим образом.
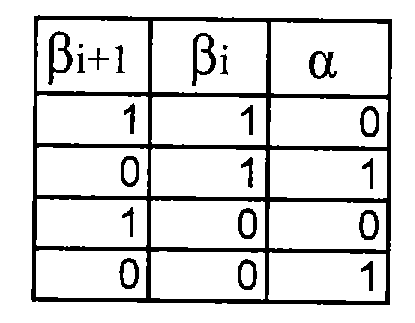
Конечности, например, локтевого сустава закрепляют на неподвижной 1 и подвижной 2 платформах. Задаются начальные параметры - скорость движения и крайние граничные положения (данные, основанные на характере повреждения, стадии лечения, клиническом опыте и т.п.). Условно, чтобы свести задачу к двоичной логике, примем следующее: движение в сторону разгиба - логическая "1", а движение в сторону сгиба - логический "0". Устройство включается. Первый триггер Шмитта 11 преобразует сигнал с выхода датчика сопротивления движению 7 в логические сигналы "0", "1", которые соответствуют сжатию или растяжению датчика свыше установленных граничных значений (обозначенных α). Второй триггер Шмитта 10 преобразует сигнал с выхода датчика угла в логические сигналы "0" или "1", которые соответствуют "сгибу" или "разгибу" сверх установленных граничных углов (обозначенных β).
Тогда таблица истинности примет вид (см. в оконце описания),
где βi+1- знак (направление) скорости вращения на i+1-м шаге, βi- знак (направление) скорости вращения на i-м шаге.
Словами эта таблица описывается так:
а) если движение идет в сторону разгиба и при этом датчик 7 растягивается свыше установленного предельного значения, то должен произойти реверс и начало движения в сторону сгиба,
б) если движение идет в сторону разгиба и при этом датчик 7 не растягивается или даже сжимается, то движение может продолжаться в сторону разгиба до изменения состояния триггера 10 и соответствующего реверса,
в) если движение идет в сторону сгиба и при этом датчик 7 сжимается свыше установленного граничного, то происходит реверс и начало движения в сторону разгиба,
г) если движение идет в сторону сгиба и при этом датчик 7 растягивается, то движение продолжается в сторону сгиба до срабатывания триггера 10 и соответствующего реверса.
Описанная технология реализуется логическим блоком 15, состоящим из триггера данных 17, в который записываются данные из триггера 10, коммутатора 16 и логического элемента "ИСКЛЮЧАЮЩЕЕ ИЛИ" 18.
Из таблицы истинности следует, что при совпадении α и βi, направление движения на i+1-м шаге меняется на обратное, а при несовпадении α и βi, направление движения сохраняется. Логический элемент "ИСКЛЮЧАЮЩЕЕ ИЛИ" 18 выделяет ситуации, когда необходимо произвести смену реверса без срабатывания триггера 10 (когда углы достигают граничных). Модуль скорости изменяется оптимизатором угловой скорости 9, который реализует алгоритм последовательных приближений (аналогично регистру последовательных приближений (РПП) аналого-цифровых преобразователей). Сигнал, управляющий разрядами РПП, формируется из сигнала датчика угла 8. При этом вычисляется объем движений на i-м и на i+1-м шаге.
Δϕi = ϕmaxi+ϕmini;
Δϕi+1 = ϕmaxi+1+ϕmini+1.
Эти объемы движений сравниваются на компараторе Σ = Δϕi+1-Δϕi, а выход компаратора управляет разрядами РПП таким образом, что если увеличение скорости приводит к уменьшению объема движений, то разряд, приводящий к увеличению скорости, обнуляется. Если же при этом происходит увеличение объема движений, то разряд сохраняется в состоянии "1".
Реализация описанной логики управления приводит к тому, что объем движений в системе тренажер - человек самоустанавливается в зависимости от мышечной реакции на движение, которая и определяет момент сопротивления движению. Если на первом этапе после операции требуется, чтобы мышцы разгибатели и мышцы сгибатели не напрягались, то врач устанавливает предельно-низкий уровень порога срабатывания первого триггера Шмитта 11. Пациенту при этом требуется максимально расслаблять указанные мышцы, чтобы устанавливался максимальный объем движений. На первом этапе расслабление указанных мышц необходимо для исключения нагрузок на мышцы-стабилизаторы сустава.
На втором этапе допускается пациенту напрягать мышцы и за счет этого также можно увеличивать объем движений, поскольку если напряжение мышц будет по фазе совпадать с моментом двигателя 4, то момент сопротивления движению со стороны мышц перейдет в момент движения (т.е. по направлению совпадут момент двигателя 4 и момент со стороны мышц). При этом первый триггер Шмитта 11 перестанет срабатывать и реверс будет осуществляться только по командам триггера 10 (т.е. движение установится в рамках допустимых граничных углов).
Таким образом, пациент на данном тренажере, обучаясь расслаблять и напрягать мышцы, восстанавливает максимальный объем движений в суставе, не травмируя его и мышцы. При этом в процессе востановления задействуется весь механизм, отвечающий за движение, включая нервную систему.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНО-ДИСТРАКЦИОННЫЙ АППАРАТ С СИСТЕМОЙ КОНТРОЛЯ И НАСТРОЙКИ | 2003 |
|
RU2240749C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2007 |
|
RU2337662C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2002 |
|
RU2214211C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| ШАРНИРНО-ДИСТРАКЦИОННЫЙ АППАРАТ | 2003 |
|
RU2240748C1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК СИЛЫ | 2003 |
|
RU2249189C1 |
| МНОГОКАНАЛЬНОЕ ТЕНЗОМЕТРИЧЕСКОЕ УСТРОЙСТВО | 2003 |
|
RU2249190C1 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ ЭЛЕМЕНТ ЧРЕЗКОСТНОГО АППАРАТА (ВАРИАНТЫ) | 2003 |
|
RU2240747C1 |
| ЭНДОПРОТЕЗ ЛОКТЕВОГО СУСТАВА | 2004 |
|
RU2264195C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |
Изобретение относится к медицине, в частности к механотерапевтическим аппаратом пассивного действия для восстановления функции суставов. Устройство содержит неподвижную и подвижную платформы для фиксации сегментов конечностей, связанные между собой шарнирно. Подвижная платформа соединена с электроприводом, двигатель которого подключен к системе управления, состоящей из преобразователя. Подвижная платформа соединена с электроприводом через дополнительную тягу посредством датчика сопротивления движению, а система управления дополнительно содержит датчик угла, оптимизатор угловой скорости, первый и второй триггеры Шмитта, генератор тактовых импульсов, а также логический блок, включающий коммутатор, триггер данных и логический элемент "ИСКЛЮЧАЮЩЕЕ ИЛИ". Технический результат заключается в обеспечении восстановления без возникновения болевых ощущений у пациента, проводя реверс привода еще на стадии возникновения отрицательной мышечной реакции. 1 табл., 1 ил.
Устройство для восстановления функции суставов, содержащее неподвижную и подвижную платформы для фиксации сегментов конечностей, связанные между собой шарнирно, при этом подвижная платформа соединена с электроприводом, двигатель которого подключен к системе управления, состоящей из преобразователя, отличающееся тем, что подвижная платформа соединена с электроприводом через дополнительную тягу посредством датчика сопротивления движению, а система управления дополнительно содержит датчик угла, оптимизатор угловой скорости, первый и второй триггеры Шмитта, задатчик предельного объема движений по углу, задатчик предельного момента сопротивления, генератор тактовых импульсов, а также логический блок, включающий коммутатор, триггер данных и логический элемент "исключающее "или", при этом выход датчика сопротивления движению подключен к функциональному входу первого триггера Шмитта, вход управления которого соединен с выходом задатчика предельного момента сопротивления, выход датчика угла, подсоединенного к шарниру, подключен к функциональному входу второго триггера Шмитта, управляющий вход которого соединен с задатчиком предельного объема движений по углу, выходы обоих триггеров Шмитта подключены ко входам логического блока, выходом соединенного со входом преобразователя, соединенным с выходом оптимизатора угловой скорости, входом подключенного к датчику угла.
| Устройство для разработки коленного сустава | 1989 |
|
SU1835280A1 |
| Физиотерапевтическое устройство | 1980 |
|
SU1066596A1 |
| Эргометр | 1979 |
|
SU782811A1 |
| Аппарат для разработки движений в суставах конечностей | 1979 |
|
SU876131A1 |
| Устройство для разработки суставов нижних конечностей | 1989 |
|
SU1671297A1 |
| Устройство для разработки движений в суставах конечностей | 1989 |
|
SU1644956A1 |
| Устройство для разработки суставов нижних конечностей | 1987 |
|
SU1468533A1 |

