Изобретение относится к медицинской технике, точнее к устройствам для нехирургического лечения больных с повреждением опорно-двигательного аппарата в результате травм или являющихся последствиями поражения центральной нервной системы.
Наиболее близким устройством по назначению является модульный ортопедический аппарат по патенту RU 02309709, принятый в качестве прототипа.
Прототип содержит ортопедические модули, соединенные между собой шарнирно. Ортопедические модули содержат приспособления для крепления их на теле. При этом поясничный отдел позвоночника соединен с жестким ортезом, который в области тазобедренных суставов имеет посадочные площадки, выполненные под углом 40±5° к вертикали. На этих площадках установлены шарниры, связывающие указанный ортез с шинами, жестко закрепленными на гильзах бедер. Аппарат-прототип позволяет зафиксировать сегменты скелета в физиологически оптимальном положении и задать лечебно-коррегирующее воздействие для коррекции костно-суставных деформаций нижних конечностей за счет движения головки бедренной кости в ветлужной впадине, повторяющей биомеханическое движение ненарушенного опорно-двигательного аппарата. Комплексное повреждение опорно-двигательного аппарата в результате травм или в результате поражения центральной нервной системы требует нейроортопедическую реабилитацию, включающую обучение движению всех суставов одновременно и синхронно. При этом пораженный опорно-двигательный аппарат можно синхронно включить в движение только пассивно с помощью приводов. Устройство-прототип при такой постановке процесса реабилитации выполняет эту функцию частично.
Целью предложенного изобретения является расширение функциональных возможностей модульных ортопедических устройств, позволяющих включить пациента в процесс самообучения движению с движением всех сегментов всех суставов синхронно.
Указанная цель в модульном ортопедическом устройстве достигается за счет шарнирного соединения модулей таким образом, что конструктив из модулей образует кресло-тренажер со спинкой, являющейся основанием устройства, которая крепится к стойке, закрепленной к полу через шаровой шарнир, основание которого соединено со статором привода, выходной вал которого соединен с подвижным элементом шарнира. Каждый из модулей кресла соответствует одному из сегментов сустава, а каждый шарнир кресла соответствует одному из суставов человека. Соединения спинки кресла с тазобедренным модулем, тазобедренного модуля с модулем коленным и модуля коленного с модулем голеностопным выполнены с помощью одностепенных приводов. Соединение спинки кресла с плечевым модулем выполнено жестко. Соединение плечевого модуля с локтевым выполнено из шарнира, составленного из двух эксцентрично расположенных полушаров, опоры которого соединены с основанием привода вращения, вал которого через тензовесы соединен жестко с локтевым модулем и основание привода установлено жестко на плечевом элементе. Причем кресло оснащено двумя такими плечелоктевыми модулями и двумя модулями тазобедренными, и двумя модулями голеностопными.
Кроме того, шарниры тазобедренный, коленный и голеностопный оснащены тензодатчиками моментов вращения, выходы которых соединены с контроллерами соответствующих приводов, выходы контроллеров подключены ко входам силовых преобразователей, подключенных к электрической цепи двигателей приводов.
Спинка кресла может принять положение от вертикали с углом от 0° до 90°. Синхронное движение приводов тазобедренного и коленного позволяет обеспечить сгибание коленного сустава от 30° до 180°. Движение привода плечелоктевого также позволяет обеспечить сгибание в этом суставе от 30° до 180°, а установка шарнира из двух эксцентричных полушаров при разгибе локтевой кости одновременно обеспечивает его ротацию и движение по вальгусному углу. Все контроллеры приводов входами соединены с общей ЭВМ, которая обеспечивает синхронизированное движение приводов, соответствующее естественному биомеханическому согласованному движению сегментов перечисленных выше суставов.
Тем самым обеспечивается процесс восстановления двигательной активности не изолированного сустава, а всех суставов в комплексе, причем восстановление именно согласованного движения. Такое движение благодаря наличию обратных биологических связей центральной нервной системы (ЦНС) и органов движения, включающих, кроме суставов, мышцы, связки и кожные рецепторы, позволяет положительно влиять на ЦНС и тем самым способствовать нейроортопедической реабилитации.
Совпадающие элементы предложенного изобретения и прототипа
1. Ортопедические модули, связанные между собой шарнирно.
2. Ортопедические модули содержат крепления их на теле пациента.
3. Ортопедические модули могут изменять угловые положения относительно друг друга.
Отличительными признаки предложенного устройства и прототипа
1. Прототип не оснащен приводами, способными синхронно изменять взаимное угловое положение между модулями, тогда как в предложенном изобретении это условие выполнено.
2. В предлагаемом изобретении движение в плечелоктевом модуле одним приводом обеспечивает 3-мерное угловое движение за счет применения шарнира из двух эксцентричных полушаров.
3. В предложенном кресле-тренажере применены модули, соответствующие всем сегментам всех суставов человека, что расширило его функциональные возможности до применения его в реабилитации тяжелых форм расстройств нейроортопедического характера (ДЦП, постинсульт).
4. Применение приводов, обеспечивающих пассивное движение в кресле-тренажере, позволяет использовать его в качестве тренажера для спортсменов. При этом привода могут задавать противодвижение мышцам-разгибателям сегментов суставов.
Для пояснения работы кресла-тренажера приведены фиг.1, фиг.2 и фиг.3.
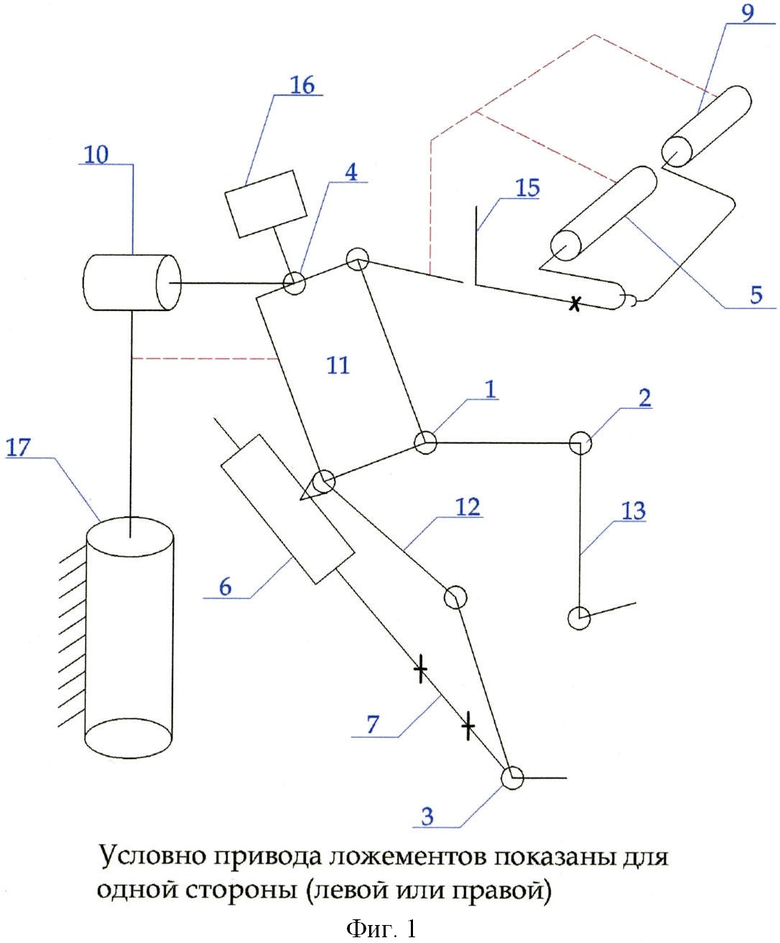
На фиг.1 показана кинематическая схема тренажера.
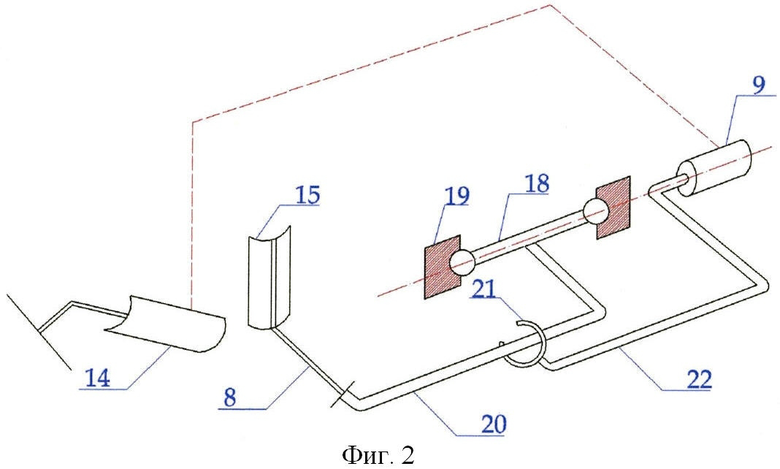
На фиг.2 показана кинематическая схема реализации плечелоктевого модуля.
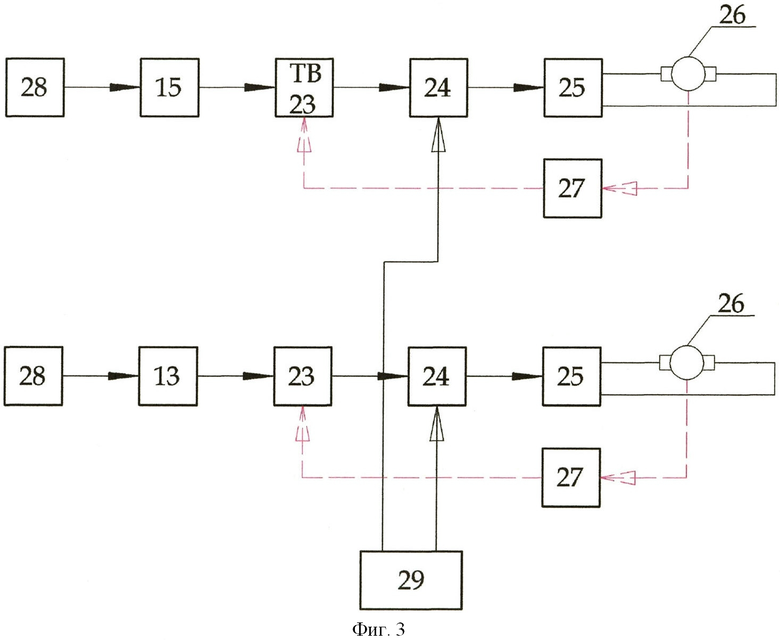
На фиг.3 показана схема электрических соединений контроллеров, приводов, датчиков усилий и ЭВМ.
На фиг.1 обозначены:
1, 2, 3, 4, 5 - шарниры, соответствующие тазобедренному, коленному, голеностопному, шейному и плечелоктевому сочленению человека;
6 - роликовинтовой линейный привод для сгибания-разгибания группы сегментов, образующих группу Асура из тазобедренного, коленного и голеностопного механизмов;
- плечелоктевой поворотный механизм, обеспечивающий 3-мерное движение в шарнире 5 за счет выполнения последнего в виде 2-х эксцентрично расположенных полушаровых сочленений;
7 - тензодатчик усилий;
8 - тензометрированная балка для измерения усилий, возникающих в плечелоктевом сочленении;
10 - привод вращения шейного сочленения;
11, 12, 13, 14, 15, 16 - ложементы, соединяемые с соответствующими сегментами суставов.
На фиг.2 обозначены:
9 - привод вращения;
18 - механический диполь из 2-х полушаров;
19 - полушаровые опоры;
15 - ложемент для крепления локтевого сегмента;
21 - вилка;
22 - г-образная тяга.
На фиг.3 обозначены:
23 - тензометрированная упругая балка;
24 - контроллер привода;
25 - полупроводниковый преобразователь с раздельными выходами управления направлением вращения двигателя и его скоростью;
26 - электрические двигатели;
27 - механические передачи приводов;
12, 13, 15 - ложементы;
29 - управляющий измерительно-вычислительный комплекс.
Кресло-тренажер совместно с закрепленными в нем пораздельно сегментами всех суставов человека образует сложный биомеханический роботизированный комплекс, управляемый от ПЭВМ 29 на основании данных, получаемых с датчиков обратных связей 7 и 8. Выходной сигнал этих датчиков содержит информацию о мышечной реакции на пробное движение одновременно и разноместно (во всех суставах), формируемое программой, заложенной в ПЭВМ. Пробные движения формируются таким образом, чтобы в начале тренировки (обучения движению) объем этих движений был бы минимален, скорость движения минимальна, а центр движений соответствовал бы наиболее привычному для конкретного пациента. При согласованной работе всех органов движения (движение всех сегментов суставов одновременное) и при малом объеме движений мышечная реакция слаба, выходные сигналы датчиков отмечают небольшие изменения этих сигналов, что позволяет ПЭВМ формировать сигналы на управление приводов большего объема движений и с большими скоростями. При этом с течением повторения периодических взаимных перемещений сегментов вначале возникает усиление мышечной реакции, а затем ее снижение, что приводит к увеличению объема движений. Причем при этом центр движений самоустанавливается аналогично, как это происходит в устройстве по патенту №2214212.
Тем самым реализуется процесс самообучения пациента правильным биомеханическим движениям без особой затраты мышечной энергии. Это особенно важно для пациентов с постинсультными расстройствами или пациентов с ДЦП.
Кресло-тренажер предлагаемое позволяет за счет привода 22 изменить положение пациента в пространстве относительно «Земли» от горизонтального до вертикального. Тем самым обеспечивается регулировка кровообращения пациента, также влияющего на его мышечную реакцию. Механизм, показанный на фиг.2, при этом своим корпусом должен быть соединен жестко со спинкой кресла-тренажера, соединенного с Землей через роликовинтовой привод 17. При вращении оси привода 9 это вращение через угловую тягу 22 и вилку 21 передается на тензометрированную балку 8, соединенную вторым концом с ложементом 15, в котором крепится локтевой сегмент пациента. Вилка 21 также передает вращение механическому диполю 18, установленному в двух эксцентрично расположенных полушаровых опорах 19. Вращение механического диполя при этом обеспечивает трехмерное копирующее биомеханическое движение в плечелоктевом суставе. Подробно этот процесс описан в патенте №2277894
Линейное перемещение привода 6 обеспечивает одновременное перемещение сегментов тазобедренного, коленного и голеностопного. Применение двух таких механизмов с нераздельным управлением (левого и правого) позволяет обеспечить асимметричное движение в левой и правой группе сегментов тазобедренной и коленной. Это особенно важно для обучения движению пациентов с ДЦП и пациентов с постинсультными нарушениями. При этом обеспечивается восстановление нарушенного кровообращения, т.к. такое движение адекватно движению «внутреннего насоса, перекачивающего кровь», т.е. работе сердечных мышц. Тем самым кресло-тренажер берет на себя часть функций, свойственных внутренним органам пациента.
В процессе повторения периодических повторяющихся движений, адекватных движениям, совершаемым здоровым человеком, происходит адаптация кресла к пациенту, а пациент обучается правильным движениям. При этом в мозгу пациента закрепляется программа об управлении своими мышечными реакциями, позволяющая координировать свои органы движения.
Движение в приводе шейного шарнира при этом может на более поздних этапах восстановления играть роль «усложняющего устройства» в процессе обучения правильным движениям. Его движение вносит возмущение в этот процесс, что позволяет закрепить программу управления органами движения, формируемую мозгом пациента. Эта программа становится способной управлять своими мышцами и связками в условиях «отвлекающих воздействий», которые могут создаваться в виде шумовых или визуальных перемещаемых в пространстве возле кресла-тренажера объектов.
Кресло-тренажер, построенное по изложенному принципу, который сводится к тому, что каждый отдельный модуль кресла крепится к соответствующему сегменту сустава и при этом модуль кресла представляет собой ложемент для этого сегмента, позволяет легко трансформироваться из кресла для больных пациентов в кресло для здоровых людей, желающих путем тренировки достигнуть «отточенности» согласованных движений органов движения. Для этого в кресле-тренажере приводы выполнены четырехквадрантными. Такими, которые из режима двигательного могут перейти в режим генераторный и тем самым обеспечить торможение в движении сегментов сустава. Значит, кресло-тренажер способно оказывать сопротивление движению, имитируя «противника» для спортсмена, помещенного в это кресло. Причем опытный спортсмен, способный преодолеть это сопротивление, обучает кресло-тренажер программе управления приводами его. Спортсмен-новичок пытается повторить движения опытного спортсмена, которые способны преодолеть заложенную программу управления, которая и обеспечивает требуемое для этого сопротивление движению.
Кратко алгоритм работы кресла-тренажера может быть изложен как последовательность действий:
1. Пациент садится в кресло, и каждый из сегментов его суставов крепится с помощью мягкого ортеза к соответствующему ложементу кресла.
2. Во включенном состоянии ЭВМ, контроллеров, датчиков и приводов формируется «пробное движение» ложементов кресла одновременно разноместно.
3. Датчики «следят» за мышечной реакцией организма пациентов и корректируют объем движений, скорость движений и центр движений ложементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированное кресло-тренажер | 2024 |
|
RU2837297C1 |
| РОБОТИЗИРОВАННЫЙ ТРЕНАЖЕР ДЛЯ ЛЮДЕЙ С НАРУШЕНИЯМИ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2604038C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ МЕХАНОТЕРАПИИ НИЖНИХ КОНЕЧНОСТЕЙ | 2023 |
|
RU2802462C1 |
| Ортопедический стол для статико-динамической гимнастики | 2018 |
|
RU2689844C1 |
| СПОСОБ МИОДИНАМИЧЕСКОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА (ВАРИАНТЫ) | 2012 |
|
RU2508921C1 |
| МОДУЛЬНЫЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ | 2006 |
|
RU2309709C1 |
| ТРЕНАЖЕР ОРТОПЕДИЧЕСКИЙ "ЛОТОС" И СПОСОБ КОРРЕКЦИИ ПАТОЛОГИЧЕСКИХ ИЗМЕНЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ПАЦИЕНТА С ЕГО ПОМОЩЬЮ | 2006 |
|
RU2307640C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У БОЛЬНЫХ С НАРУШЕНИЕМ ПРОВОДИМОСТИ ПО СПИННОМУ МОЗГУ | 2003 |
|
RU2236209C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| СПОСОБ ТОРМОЖЕНИЯ СИММЕТРИЧНОГО ШЕЙНОГО ТОНИЧЕСКОГО РЕФЛЕКСА ПРИ СПАСТИЧЕСКИХ ФОРМАХ ДЕТСКОГО ЦЕРЕБРАЛЬНОГО ПАРАЛИЧА | 2005 |
|
RU2297845C1 |
зобретение относится к устройствам для нейрохирургического лечения больных с повреждением опорно-двигательного аппарата. Каждый из модулей кресла-тренажера представляет собой ложемент для крепления соответствующего сегмента сустава. Ложементы-модули между собой соединены шарнирно так, что один из пары соединенных модулей является основанием привода, а второй через тензометрический датчик усилия соединен с выходным валом этого привода. Основанием тренажера является спинка кресла. С ней жестко соединен корпус роликовинтового линейного электропривода. Выходной вал этого привода через тензодатчик соединен с коленным ложементом в области его сочленения с голеностопным ложементом. Со спинкой кресла также соединен ложемент плечевого сегмента, который является основанием электропривода вращения. Выходной вал последнего через угловую тягу и вилку соединен с механическим диполем, установленным в две полушаровые опоры, соединенные жестко с плечевым ложементом. Механический диполь при этом через тензометрированную упругую балку соединен с ложементом локтевым. Перечисленные механизмы в кресле-тренажере выполнены левыми и правыми, управляемыми раздельно от контроллеров, информационные входы которых соединены с единым процессором и вторыми входами с выходами датчиков усилий, возникающих при задании «пробных движений» ложементам. Сигналы с датчиков несут информацию о мышечной реакции на «пробное движение». В результате кресло-тренажер позволяет восстановить опорно-двигательный аппарат человека, поврежденный в результате травм или нарушенный из-за повреждения центральной нервной системы или частичных повреждений мозга. Кресло-тренажер относится также к устройствам нейроортопедической реабилитации. 3 ил.
Модульное ортопедическое кресло-тренажер, содержащее управляющую ЭВМ и состоящее из шарнирно-соединенных модулей, отличающееся тем, что каждый из шарнирно-соединенных модулей представляет собой ложемент для соответствующего сегмента сустава человека, соединяемый с этим сегментом с помощью мягких ортезов, один из двух сочленяемых ложементов является основанием для крепления электрического привода, а второй жестко соединяется с его выходным валом через датчик усилий, причем спинка кресла-тренажера является основанием устройства, соединенным жестко с выходным валом роликовинтового механизма, оснащенного электрическим приводом с основанием, причем со спинкой кресла-тренажера жестко соединено основание второго роликовинтового электрического привода, выходной вал которого соединен шарнирно с коленным ложементом в области его сочленения с ложементом голеностопным через датчик усилия, дополнительно спинка кресла-тренажера жестко закреплена с плечевым ложементом и основанием привода локтевого ложемента, который через тензометрированную балку, вилку и угловую тягу соединен с валом привода локтевого ложемента и дополнительно с механическим диполем из двух эксцентрично расположенных полушаров, установленным в двух полушаровых опорах, эксцентрично расположенных и жестко закрепленных на спинке кресла-тренажера, при этом выходы всех датчиков усилий и выходы датчиков тензометрированной балки электрически соединены со входами контроллеров, имеющих информационную связь с управляющей ЭВМ, причем выходы каждого из контроллеров соединены с соответствующими входами преобразователей с раздельным управлением знаком и скоростью движения двигателя, а выходы преобразователей подключены к якорным цепям двигателей указанных механизмов.
| Прибор для определения направления астрономического меридиана | 1940 |
|
SU67877A1 |
| Кресло-тренажер | 1983 |
|
SU1139434A1 |
| Кресло-тренажер | 1985 |
|
SU1326294A1 |
| Кресло-тренажер | 1987 |
|
SU1477407A2 |
| Кресло-тренажер | 1989 |
|
SU1724232A1 |
| US 5155685 А, 13.10.1992 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| JP 10118143 А, 12.05.1998. | |||

