Изобретение относится к способу регулирования положения вращающегося элемента, удерживаемого постоянным магнитным полем, например ротора бесколлекторного синхронного электродвигателя, посредством определения позиции этого элемента с помощью сенсорного устройства определения положения и применения катушек индуктивности для дополнительного управления путем воздействия на магнитное поле постоянной магнитной подвески, при этом величина тока в катушках определяется положением этого элемента.
Синхронный электродвигатель может, например, выполнять функции привода для прямоточного жидкостного насоса. Однако многофазные жидкости, например эмульсии и дисперсии с низкой стабильностью, могут легко перейти в область нестабильных состояний в процессе прохождения через нагнетающие системы.
Особенно чувствительной жидкостью является кровь. Кровь отделена от окружающей среды герметичной естественной системой циркуляции (кровообращения), поэтому на нее не воздействуют никакие внешние факторы. Если, однако, возникает необходимость заменить сердце искусственным кровяным насосом или поддерживать кровообращение с помощью дополнительного кровяного насоса, то неизбежно взаимодействие крови с данной технической системой. Кровь при этом легко подвержена гемолизу или формированию тромбов с соответствующими неблагоприятными последствиями для пациента. Поэтому в последнее время большие усилия прилагаются к созданию таких жидкостных насосов, в которых кровь или другие нестабильные жидкости подвергались бы минимальному механическому воздействию. Одну из возможностей открывает использование магнитной подвески ротора в приводе насоса. Преимущество магнитной подвески заключается не только в том, что она позволяет повысить ротационное ускорение вращающегося элемента, а также облегчает процесс управления скоростью вращения, за счет чего увеличивается объем перекачиваемого вещества.
Известно устройство, в котором гидронасос встроен в бесколлекторный синхронный электродвигатель. Описанный в публикации WO 00/64030 гидронасос состоит, в основном, из цилиндрической трубы, которая может быть подсоединена с обеих сторон к жидкостной системе. Вокруг трубы расположен статор, состоящий из металлического пакета-сердечника, обмотки и железного кожуха. Ротор включает в себя источники (генераторы) постоянного магнитного поля и размещенные на его внешней поверхности устройства для доставки жидкости, обеспечивающие продольный (осевой) поток жидкости в кольцевом зазоре между трубой и ротором.
Ротор подвешен в магнитном поле. Это обеспечивается путем размещения на обоих концах ротора прикрепленных к нему цилиндрических или кольцевых постоянных магнитов, которые намагничены в осевом направлении. Постоянные магниты ротора противодействуют намагниченным в противоположном направлении постоянным магнитам, которые, например, могут размещаться в торцах корректирующих устройств, которые, в свою очередь, установлены в цилиндрической трубе.
Обе магнитные пары оказывают стабилизирующее действие в радиальном направлении, когда они ориентированы таким образом, чтобы притягивать друг друга, то есть радиальная подвеска является пассивно устойчивой. Ротор, однако, является неустойчивым в осевом направлении.
Без дополнительной стабилизации ротор был бы притянут одной из двух пар постоянных магнитов. Поэтому катушки управления размещаются на сторонах статора таким образом, чтобы ток ослаблял за счет последовательно соединенных управляющих катушек магнитное поле одной из пар постоянных магнитов и увеличивал магнитное поле другой пары постоянных магнитов. Управляющий ток регулируется в зависимости от фактического осевого положения ротора. Для этого положение ротора определяется посредством сенсорных элементов.
Сенсорные элементы состоят, например, из двух сенсорных катушек, которые могут размещаться на торцах корректирующих устройств. Напротив катушек сенсорных элементов на концах ротора размещены алюминиевые бруски, в которых наводятся вихревые токи, когда через катушки сенсорного элемента пропускается переменный ток. Осевые перемещения ротора вызывают изменения индуктивности катушек сенсорного элемента, и эти изменения, в случае мостикового соединения катушек, служат в качестве корректирующего сигнала для сохранения стабильного положения ротора.
В связи с тем что при прохождении через насос потока, особенно пульсирующего, на ротор постоянно действуют возмущающие силы, устройство позиционной коррекции должно быть способно быстро восстанавливать осевое положение ротора. С другой стороны, управляющий ток должен обладать низким коэффициентом рассеяния, что особенно важно для кровяных насосов, поскольку сопутствующая тепловая энергия должна оставаться на минимальном уровне. Кроме того, питание привода приходится осуществлять от имплантированных батареек, срок службы которых должен быть возможно более продолжительным.
Изобретение решает проблему разработки способа регулирования положения подвешенного в магнитном поле элемента, при котором отклонения от заданного положения могут оставаться весьма малыми.
Такое решение обеспечивается предлагаемым изобретением за счет признаков, перечисленных в пункте 1 формулы изобретения. В зависимых пунктах формулы заявляются варианты воплощения данного решения.
Согласно этому решению ток, пропускаемый через управляющие катушки, подвергают широтно-импульсной модуляции (т.е. модуляции по длительности импульса) в соответствии с тем требуемым значением, на которое настроен регулятор, подключенный последовательно за сенсорным устройством определения положения, в котором при высоком требуемом значении тока осуществляют переключение на более высокое напряжение. Преимущество этого решения заключается в том, что время регулирования может быть очень незначительным, и этим, соответственно, обеспечивается экономия потребляемой энергии.
Фактические данные (показания), поступающие от сенсорного устройства определения положения, сохраняют в течение определенного времени, выдавая, соответственно, самые последние данные с фронтом импульса управляющего тока, причем работу сенсорного устройства определения положения приостанавливают на этот период.
Дополнительны преимуществом использования регулирования положения в бесколлекторном синхронном электродвигателе является то, что фактические данные, поступающие от сенсорного устройства определения положения, также временно сохраняют в привязке к отпирающему импульсу катушек двигателя в течение определенного временного интервала, начиная, самое позднее, с фронта импульса, причем работу сенсорного устройства определения положения приостанавливают на этот временной интервал.
Помехи (интерференция), порождаемые процедурой синхронизации определения положения, устраняют путем приостановки измерений в течение этих интервалов времени и за счет сохранения полученных данных.
Для конкретных реализации изобретения можно, например, брать квадрат желаемого значения, задаваемого регулятором, подключенным после сенсорного устройства определения положения, и приостанавливать регулирование положения на усредненный временной интервал между пиковым порогом этого значения и последующим провалом порога. Таким путем ограничивают повышение температуры катушек управления и, соответственно, устраняют перегрев. В качестве регулятора, подключенного после сенсорного устройства, целесообразно использовать ПИД-регулятор с I2-компонентом.
Изобретение описано подробно в виде варианта конструкции. На соответствующих чертежах представлены:
Фиг.1 представляет разрез гидронасоса, в котором осуществлен способ согласно предлагаемому изобретению;
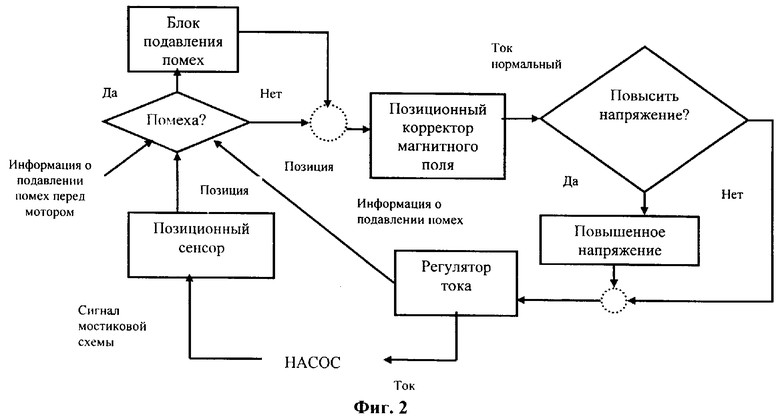
Фиг.2 иллюстрирует принцип регулирования положения с дополнительным управлением потоком согласно изобретению;
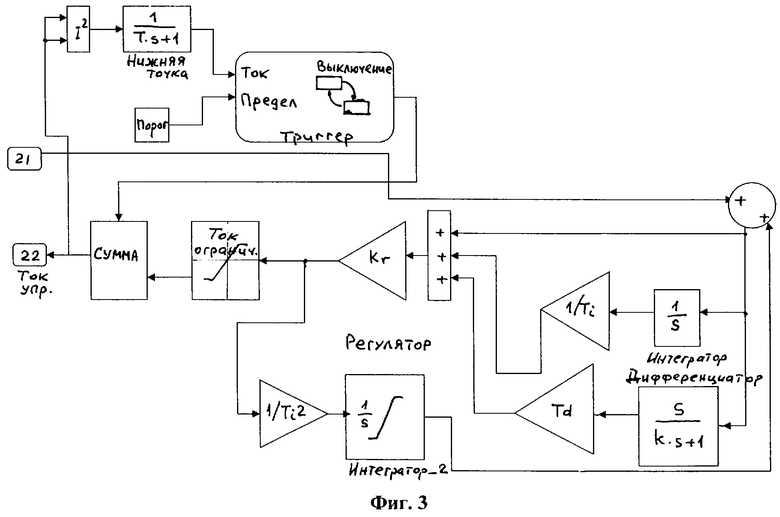
и Фиг.3 представляет блок-схему регулятора положения.
На Фиг.1 показан прямоточный насос, пригодный для осуществления данного способа. Привод этого кровяного насоса работает на принципе электронно-коммутированного синхронного электродвигателя. Такой двигатель имеет статор, состоящий из пакета 31 металлических пластин, из обмоток 33 и железных кожухов 2, 2а и ротора 5 с постоянным магнитным сердечником 32. Внутри статора находится трубчатое полое тело 1, в которое по осевому направлению подается жидкость, в данном случае - кровь. Ротор 5 подвешен бесконтактным способом в магнитном поле.
Магнитная подвеска состоит из постоянных магнитов 42, 42а, размещенных на торцах ротора, и постоянных магнитов 41, 41а, размещенных на торцах направляющих устройств 6 и 7. Направляющие устройства 6, 7 установлены на внутренней стенке трубчатого полого тела 1.
В состав магнитной подвески входят, помимо прочего, управляющие катушки 12, 12а. При этом сенсорные катушки 43, 43а, размещенные в направляющих устройствах 6, 7, а также коротко замкнутые кольца 80, 80а, размещенные напротив них, образуют сенсорное устройство определения положения, предназначенное для определения фактического положения ротора. Пары постоянных магнитов 41, 42; 41а, 42а, соответственно, поляризованы таким образом, чтобы притягивать друг друга. В отношении магнитного потока они представляют собой последовательно соединенные пары, поэтому без дополнительной стабилизации ротор 5 притягивался бы к одной стороне. Неустойчивое равновесие отмечается именно в осевом направлении. В радиальном направлении обе пары магнитов действуют центростремительно, и, поэтому, радиальное положение пассивно устойчиво.
Управляющие катушки 12, 12а соединены электрически последовательно, а по магнитным параметрам они размещены так, что проходящий ток ослабляет магнитное поле одной пары магнитов и увеличивает магнитное поле другой пары. Магнитный поток замыкается через железные кожухи 2, 2а и пакет 31 металлических пластин статора. Осевое положение ротора 5 может быть определено посредством сенсорных катушек 43, 43а. На сенсорных катушках 43, 43а будет возникать более частые скачки напряжения. Вследствие аксиального движения ротора 5 происходит изменение индуктивности в сенсорных катушках 43, 43а. Путем мостикового соединения сенсорных катушек 43, 43а обеспечивают возникновение сигнала, характеризующего осевое положение ротора 5.
Как показано на Фиг.2, на выходе регулятора, подсоединенного после сенсорного устройства определения положения, возникает управляющий ток достаточной величины, порождаемый управляющими катушками 12, 12а. Управляющий ток передается посредством регулятора тока на управляющие катушки 12, 12а. Регулятор тока функционирует как замкнутая цепь управления, то есть он измеряет величину тока посредством управляющих катушек 12, 12а и сравнивает результат с требуемым значением тока, задаваемым регулятором. При этом фактический ток доводят до требуемого уровня посредством широтно-импульсной модуляции на стадии импульсной подачи питания. Этот процесс требует определенного времени, которое зависит от того, насколько отличается фактическая величина тока от требуемого значения тока. Чем выше напряжение источника питания, тем быстрее осуществляется регулирование регулятором тока. С другой стороны, при повышении напряжения источника питания увеличивается утечка (рассеяние) энергии. Чтобы обеспечить быстрое срабатывание регулятора тока при относительно низкой утечке энергии, повышенное напряжение подается дополнительно только при наличии большой разницы между требуемым значением тока и фактическим током, в противном случае на устройство подают более низкое напряжение.
За счет возбуждения управляющих катушек 12, 12а импульсным источником питания в сенсорных катушках 43, 43а возникают интерференционные возмущения, которые могут отрицательно влиять на определение положения ротора 5.Эти интерференционные возмущения сопровождают каждый фронт импульса, поступающий от управляющих катушек 12, 12а на сенсорные катушки 43, 43а, и затухают через определенный интервал времени. Поэтому в течение расчетного интервала этих интерференции сигнал положения, поступивший непосредственно перед этим, записывается для временного хранения, а определение положения приостанавливается. Регулятор положения в течение этого интервала работает на основе сохраненного сигнала. Когда интерференции затухают, позиция ротора опять определяется посредством сенсорных катушек 43, 43а. Подобные интерференции могут также быть вызваны возбуждением обмоток 33. Для них также применим способ временного хранения. Электронное устройство подавления помех получает от регулятора тока и от электронной системы возбуждения двигателя сигнал, указывающий точное время возможного возникновения интерференции с тем, чтобы можно было сохранить сигналы положения.
На Фиг.3 приведена электрическая схема для регулирования положения магнитной подвески. При конкретном замеренном положении ротора данные измерений поступают по каналу 21, по этим данным определяется управляющий ток для управляющих катушек 12, 12а, который обеспечивает гарантированную подвеску ротора 5 при всех условиях эксплуатации, и этот ток подается на выход 22 регулятора положения. Этот регулятор состоит из ПИД-регулятора, который характеризуется константами времени интегратора Ti и дифференциатора Td, а также коэффициентом kr усилителя с переменным коэффициентом усиления. Для предохранения управляющих катушек 12, 12а от тепловой перегрузки ожидаемое рассеяние тепла дополнительно определяют, исходя из квадрата величины тока. В течение усредненного времени порогового положительного отклонения (перерегулировки) от заданного положения регулятор положения отключается до того момента, когда пороговое отклонение не станет отрицательным. У регулятора положения имеется дополнительная функция, а именно поддерживать ток, пропускаемый через управляющие катушки 12, 12а, на минимально возможном уровне. Управляющий ток подается посредством интегратора (I2-компонента) обратно на выход регулятора. В результате ротор 5 всегда удерживается в осевом положении в насосе, при этом через управляющие катушки 12 и 12а проходит электрический ток минимальной величины.
Изобретение относится к медицинской технике и используется в насосах для перекачивания крови. Согласно способу ток, проходящий через управляющие катушки, подвергают широтно-импульсной модуляции в соответствии с требуемым значением, зафиксированным в регуляторе, подключенном последовательно за сенсорным позиционным устройством. Текущие показания позиционного сенсора сохраняют в течение определенного временного интервала, начиная, соответственно, с возникновения фронта импульса управляющего тока. Сенсорное определение позиции на этот временной интервал приостанавливают. Технический результат заключается в повышении точности позиционного контроля. 3 з.п. ф-лы, 3 ил.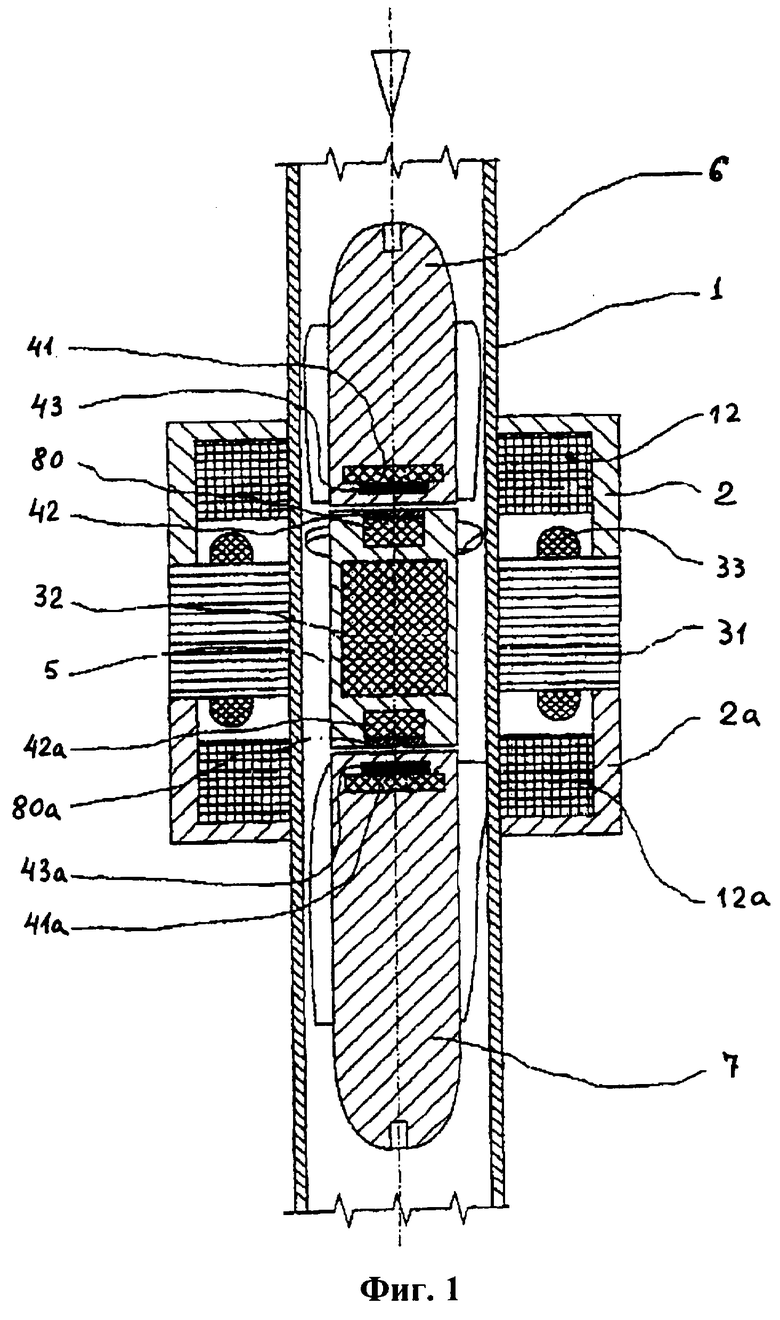
| US 6015272 А, 18.01.2000 | |||
| WO 00/74748 A1, 14.12.2000 | |||
| WO 00/64030 A1, 26.10.2000 | |||
| US 5385581 А, 31.01.1995 | |||
| Бесконтактный датчик перемещения | 1987 |
|
SU1744431A1 |

