Изобретение относится к способам управления вспомогательным насосом для систем перекачки жидкостей в условиях пульсирующего давления.
Известно применение вспомогательных насосов, предназначенных для поддержки работы пульсационных насосов в системах перекачки жидкостей. Такие вспомогательные насосы имеют, как правило, постоянную частоту рабочих циклов. График работы такого вспомогательного насоса в координатах "перепад давления/интенсивность потока" свидетельствует о том, что при повышении входного давления, влекущего за собой повышение интенсивности потока (разница между входным и выходным давлением), вспомогательный насос повышает интенсивность потока и наоборот.
Кроме того, однако, интенсивность потока через вспомогательный насос в фазе низкого давления, т.е. при пониженном входном давлении, понижается не до нулевого значения. Чем круче график "перепад давления/интенсивность потока" в характеристиках конкретного насоса, тем выше интенсивность остаточного потока в этой фазе. Это может приводить к тому, что поток приостановится, и на перекачивающую систему, расположенную перед вспомогательным насосом и включающую основной насос, будет воздействовать отрицательное давление, которое может вызвать нежелательные последствия, например, остаточный поток может подвергаться высокой турбулентности при поступлении в нагнетательный цилиндр основного насоса.
Особенно уязвимой системой перекачки жидкости является система кровообращения. Кровь под воздействием ритмических сокращений сердца циркулирует в закрытой сосудистой системе. В последние несколько лет в случаях дисфункции сердца устанавливают вспомогательные насосы, которые призваны поддержать все еще присутствующий сердечный пульс. Кровь направляется из левого желудочка сердца в обход сердечного клапана во вспомогательный насос и оттуда - в аорту. Такие вспомогательные насосы могут проектироваться как пульсационные поршневые насосы или как турбонасосы с радиальным или аксиальным потоком. Пульсационные насосы поршневого типа оказались непригодны из-за необходимости их синхронизации с сердечным пульсом. В турбонасосах предпочтение отдается насосам с аксиальным потоком из-за их малых размеров (далее - "аксиальные насосы").
Известные аксиальные насосы для перекачки крови состоят, по существу, из внешней цилиндрической трубы, в которой расположен подающий элемент в виде ротора, вращающегося внутри статора и перемещающего кровь в осевом направлении. Кроме того, известен принцип магнитной бесконтактной поддержки ротора. Такой вспомогательный насос описан в публикации WO 00/64030.
Если такой вспомогательный насос имеет постоянное число оборотов, это приводит к тому, что из-за вышеупомянутых причин кровь будет все еще нагнетаться вспомогательным насосом даже тогда, когда желудочек сердца находится в фазе расширения.
Изобретение решает задачу создания способа, с помощью которого поток во вспомогательном насосе оказывал бы достаточно простым путем поддерживающее действие только на нагнетательной фазе основного насоса.
Эта задача решается в соответствии с пунктом 1 формулы изобретения.
Варианты конструкции, реализующей данный способ, заявлены в зависимых пунктах формулы.
Согласно этому способу перепад давления между входом и выходом вспомогательного насоса, а также интенсивность потока через вспомогательный насос являются фиксированными. Число оборотов вспомогательного насоса регулируется таким образом, что фиксированный перепад давления не опускается ниже предопределенного значения, а интенсивность потока не опускается ниже нулевого значения.
Предпочтительным вариантом реализации способа является использование в качестве вспомогательного насоса такого аксиального насоса, который снабжен электронно-коммутируемым синхронным мотором, подвеской в постоянном магнитном поле и катушками управления магнитной подвески ротора, а перепад давления между входом и выходом вспомогательного насоса является фиксированным, при этом возмущающая сила, действующая на ротор и пропорциональная перепаду давления, определяется параметрами управления магнитной подвески, в качестве которых выступают значения силы тока в управляющих катушках и фактическое положение, т.е. координаты ротора. В то же время интенсивность потока через вспомогательный насос может устанавливаться в зависимости от фактического числа оборотов и отличия давления от изначально фиксированной области на графике "перепад давления/интенсивность потока", характеризующем работу вспомогательного насоса. Таким образом, отпадает необходимость в установке отдельных датчиков давления и интенсивности потока.
Изобретение далее описано подробно в виде конструкции вспомогательного насоса для перекачивания крови, в котором реализован способ.
На чертежах представлено:
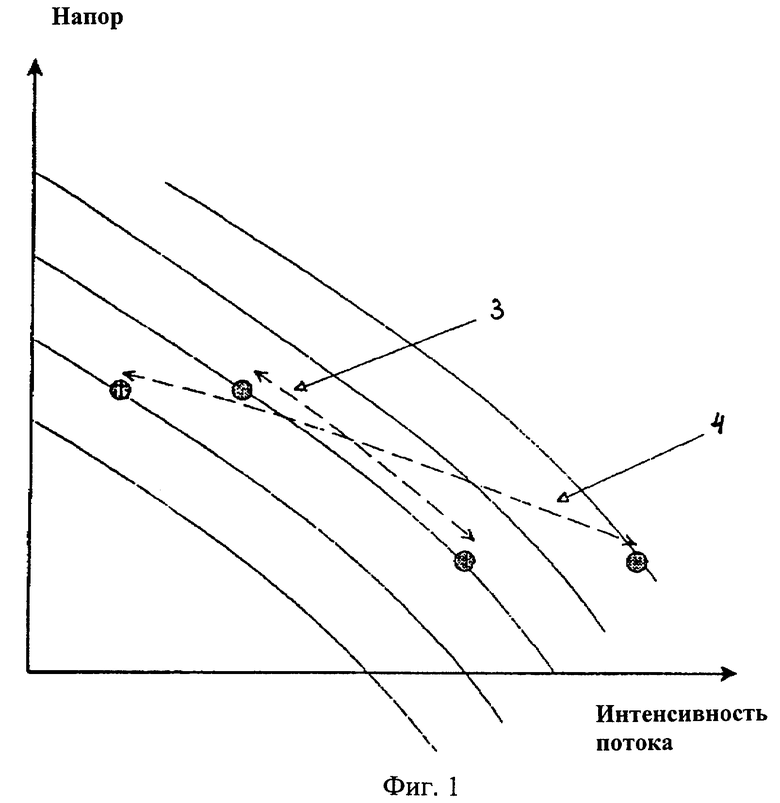
фиг.1 - график характеристик аксиального насоса,
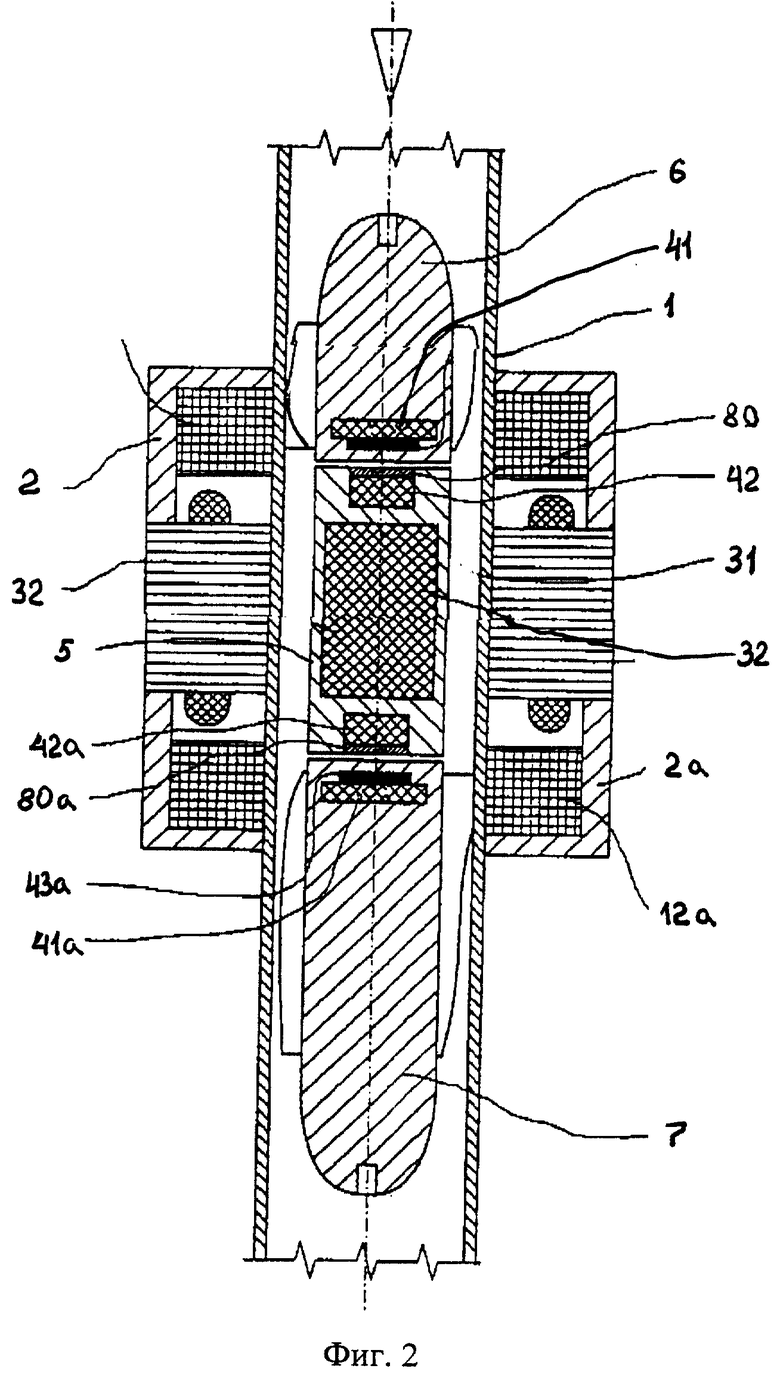
фиг.2 - вспомогательный насос для реализации способа,
фиг.3 - блок-схема варианта управления согласно изобретению,
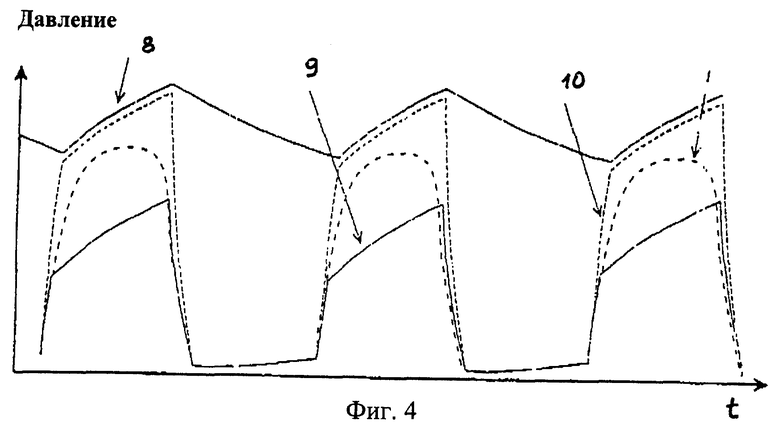
фиг.4 - график изменения давления во вспомогательном насосе для сердца,
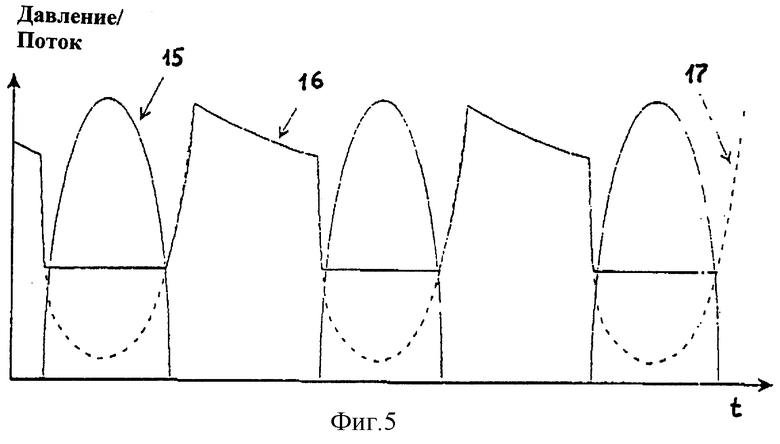
фиг.5 - график напора и интенсивности потока во вспомогательном насосе для сердца,
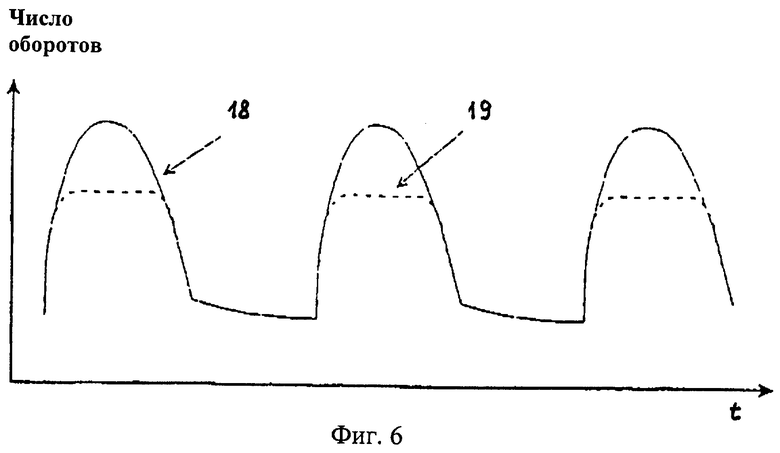
фиг.6 - график числа оборотов во вспомогательном насосе для сердца,
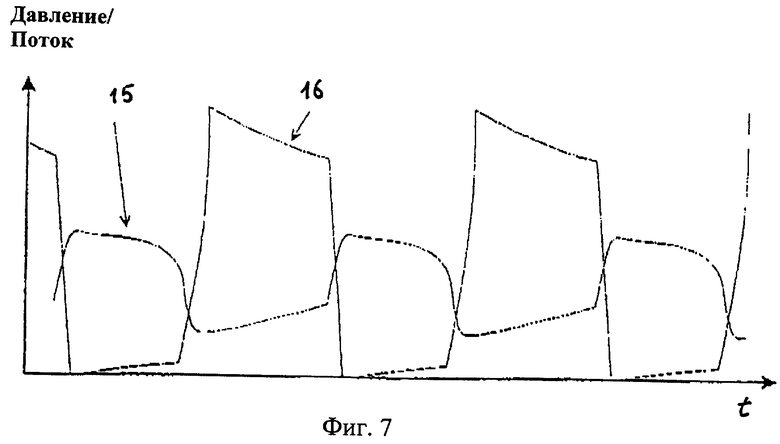
фиг.7 - график сравнительных величин напора и интенсивности потока,
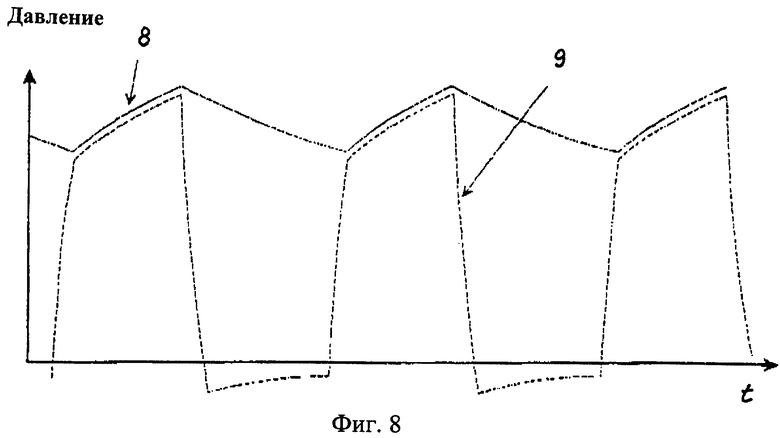
фиг.8 - график давления во вспомогательном насосе для сердца при работе на постоянных оборотах.
Фиг.1 показывает область рабочих значений кровяного насоса с осевым потоком. Линии графика показывают, соответственно, зависимость перепада давления в насосе (напора) от объема перекачиваемой жидкости в единицу времени при конкретном числе оборотов. В период работы при постоянном числе оборотов рабочая точка насоса тоже перемещается по линии графика.
Степень изменения интенсивности потока в процессе изменения данного перепада давления определяет угол наклона линии графика. Для заметного изменения этого показателя необходимо изменять число оборотов в зависимости от напора в данный момент времени. Рабочая точка в этом случае уже не сдвигается по линии постоянного числа оборотов, а перемещается между линиями, характеризующими различное число оборотов. Отсюда следует, что именно число оборотов является тем параметром, на который надо воздействовать. Если при заданном увеличении напора жидкости надо обеспечить более резкое снижение интенсивности потока, чем то, которое предопределено присущей насосу линией графика, потребуется понижать число оборотов ротора при повышении напора и повышать число оборотов при понижении напора. За счет этого на графике наблюдается перемещение точки в области рабочих значений и, соответственно, явное уменьшение угла наклона линии, характеризующей работу насоса.
Для естественной системы кровообращения существенным условием является то, что кровь не должна поступать обратно в сердце в течение диастолической фазы. В неповрежденной системе кровообращения это обеспечивается сердечным клапаном. Поэтому, кровяной насос также должен имитировать функции сердечного клапана. Согласно изобретению, для управления процессом, т.е. обеспечения такой имитации, необходимо знать такие параметры, как напор и интенсивность потока. Эти данные могут быть получены посредством соответствующего сенсорного устройства, т.е. датчиков. Данные можно также получить путем экспертного отбора конкретного типа насоса по характеристикам привода насоса.
На фиг.2 показан такой кровяной аксиальный вспомогательный насос, пригодный для осуществления данного способа. Привод кровяного вспомогательного насоса основан на принципе электронно-коммутируемого синхронного мотора. Мотор имеет статор, включающий пакет 31 металлических пластин, обмотки 33, железные кожухи 2, 2а и ротор 5 с сердечником 32 из постоянного магнита. Статор размещается вокруг трубчатого полого корпуса 1, через который в осевом направлении подается жидкость, в данном случае - кровь. Ротор 5 подвешен бесконтактно в магнитном поле.
Магнитная подвеска состоит из постоянных магнитов 42, 42а, расположенных в торцах ротора, и постоянных магнитов 41, 41a, расположенных в торцах направляющих 6 и 7. Направляющие 6, 7 установлены на внутренней стене трубчатого полого корпуса 1. В состав магнитной подвески входят также управляющие катушки 12, 12а. Катушки 43, 43а в направляющих 6, 7 и замкнутые кольца 80, 80а, размещенные напротив них, предназначены для замеров фактического положения ротора, т.е. координат ротора.
Пары постоянных магнитов 41-42 и 41a-42а, соответственно, притягивают друг друга. Пары магнитов образуют последовательно соединенную магнитную цепь.
Без дополнительной стабилизации ротор 5 притягивается к одной из сторон, т.е. в осевом направлении равновесие неустойчиво. В радиальном направлении обе пары магнитов оказывают центрирующее воздействие, поэтому, радиальное положение является пассивно устойчивым.
Управляющие катушки 12, 12а подключены последовательно, а в отношении магнитного поля они размещены таким образом, что электрический ток ослабляет магнитное поле одной из пар магнитов и усиливает магнитное поле другой пары. Магнитные силовые линии замыкаются через железные кожухи 2, 2а и пакет 31 металлических пластин статора.
Осевое положение ротора 5 может быть определено посредством сенсорных катушек 43, 43а. На сенсорные катушки 43, 43а подают ток более высокой частоты. В процессе аксиального перемещения ротора 5 возникает взаимная расстройка сенсорных катушек 43, 43а. Посредством соединения сенсорных катушек 43, 43а по мостиковой схеме можно определить измерительный сигнал для восстановления осевого положения ротора 5.
Осевая стабилизация достигается за счет управляющей цепи. Сигнал, характеризующий замеренное положение ротора, подается на вход регулятора. Выходной сигнал регулятора, корректирующий ток, подается на управляющие катушки 12, 12а. Таким путем можно управлять положением ротора 5 между двумя торцевыми опорами. Затем, когда сумма всех магнитных и механических сил достигает нулевого значения, ток отключается. В ненагруженном моторе это происходит в среднем положении. В такой ситуации управляющий ток является практически бесконечно малой величиной. Когда ротор 5 аксиально загружен, возникает необходимость смещения его против прилагаемой силы до тех пор, пока ставшие асимметричными силы постоянных магнитов 41, 42; 41a, 42a не скомпенсируют возмущающую силу. В этот момент управляющий ток вновь становится бесконечно малой величиной.
Регулятор выполнен в виде пропорционально-интегрально-дифференциального регулятора (ПИД-регулятор) с двумя интеграторами для нулевого тока управления. Регулятор может компенсировать внезапные (скачкообразные) возмущения практически без перерегулирования. Поиск нулевой точки осуществляется достаточно быстро для того, чтобы поддерживать величину управляющего тока, близкой к нулю в процессе приложения конкретной возмущающей частоты.
Замеряемый сигнал определяется посредством мостиковой схемы, в которую включены сенсорные катушки 43, 43а. Замеры, однако, затрудняются из-за наличия управляющего тока в управляющих катушках и тока в моторе. Вследствие этого при осуществлении способа «расстройки» замеры проводят только в фазе свободных от возмущений временных интервалов между импульсами переключения. В фазе импульса переключения последнее замеренное перед «расстройкой» значение сохраняется.
Осевая стабилизация ротора 5 в магнитной подвеске позволяет оценивать величину возмущающей силы, действующей на ротор 5. Сумма сил, действующих на ротор 5, должна быть нулевой в каждый момент времени. Силы системы, состоящей из постоянных магнитов, силы систем, состоящих из электромагнитов, и механические силы, особенно силы давления, силы трения, демпфирующие силы и силы ускорения, должны скомпенсировать друг друга. При том условии, что частоты подлежащих определению возмущающих силы являются низкими по сравнению с граничной частотой цепей управления стабилизацией, демпфирующими силами и силами ускорения можно пренебречь. Поэтому, интерференционные силы определяются такой формулой:
возмущающая сила=управляющий ток×электромагнитная чувствительность - положение ротора×осевая жесткость.
Электромагнитная чувствительность является константой для конкретной магнитной цепи. Осевая жесткость представляет собой ту силу, которая требуется для перемещения ротора 5 в осевом направлении на определенное расстояние, а также является константой в рассматриваемом диапазоне (зазор ротора около 0,5-2,5 мм). Через возмущающую силу можно определить величину пропорционального скачка давления во вспомогательном насосе, которая может использоваться в качестве динамического сигнала для регулирования числа оборотов. В то же время, интенсивность потока может быть определена через перепад давлений и число оборотов насоса по рабочей кривой графика известного насоса.
Путем выбора специального кровяного насоса и квалифицированной обработки известных данных об управлении подвеской ротора можно добиться того, что использование датчиков давления и интенсивности потока будет излишним.
Описываемый ниже насос также особенно пригоден для реализации заявленного способа по другим причинам. Синхронный мотор, коммутируемый без сенсорных элементов, обеспечивает большое угловое ускорение ротора насоса. Это ускорение и связанные с ним аксиальные и радиальные силы, воздействующие на ротор 5, компенсируются магнитной подвеской. Используемый диапазон числа оборотов не ограничен резонансными частотами радиальной подвески ротора. Резонанс всегда демпфируется. Вследствие этого появляется возможность изменения числа оборотов с минимального до максимального за, примерно, 50 мс, что обеспечивает поступление потока через насос, практически, сразу после начала вращения ротора.
На фиг.3 приведен пример возможной цепи управления для управления числом оборотов. Вход 21 предназначен для задания желательного напора вспомогательного насоса. Этот параметр зависит от того, какое естественное давление может все еще обеспечено сердцем, и какое дополнительное давление потребуется обеспечить с помощью вспомогательного насоса. На вход 22 подают в качестве значения необходимого напора, определенные по вышеописанной методике данные о перепаде давлений между входом и выходом вспомогательного насоса, которые поступают в компаратор 23, сравнивающий фактическое и желательное значения. Полученная в результате девиация управления корректируется ПИД-регулятором 34 и, затем ограничителем для определения корректировочного параметра для числа оборотов. Этот корректировочный параметр позволяет системе управления мотором установить соответствующее число оборотов.
Фигуры с 4 по 6 показывают временной график изменения рабочих параметров в систолической и диастолической фазах. Вспомогательный насос установлен между выходом из левого желудочка сердца и аортой. Давление, создаваемое желудочком сердца, является входным давлением вспомогательного насоса, а давление в аорте после вспомогательного насоса является, в то же самое время, его выходным давлением.
Перепад давлений между естественным давлением, создаваемым желудочком, и желаемым давлением в аорте должен быть обеспечен в систолической фазе вспомогательным насосом. В диастолической фазе следует позаботиться лишь о предотвращении возврата потока крови в желудочек сердца.
Фиг.5 показывает напор, т.е. высоту подачи вспомогательного насоса при заданных условиях. Требуемое значение напора примерно в два раза меньше среднего артериального давления. Если давление опускается ниже этого требуемого значения, включается управление числом оборотов, насос, в случае необходимости, набирает максимальное число оборотов, и гонит кровь в аорту. Если напор вновь возрастает на фоне понижения давления в желудочке, корректировочное значение числа оборотов, а вместе с ним и число оборотов ротора, снижаются пока не будет достигнута диастолическая фаза.
Предотвращение возможности возвратного потока в желудочек достигается посредством введения отрицательных значений потока в ветви 24 через усилитель управления k на компаратор 23, чем обеспечивается такое состояние, когда в диастолической фазе поддерживается число оборотов, не позволяющее потоку понижаться ниже нуля, но удерживающее его на уровне, близком к нулевому.
В представленном варианте конструкции на уровень желаемого напора, помимо прочего, влияет корректировочное значение, которое определяется путем сравнения фактического числа оборотов ротора с максимальным числом оборотов ротора. Если число оборотов ротора, отмеченное в ветви 25, превышает предопределенное максимальное число оборотов ротора в ветви 26, то значение этой девиации, усиленное усилителем управления k1, поступает с отрицательным знаком на компаратор 27, на котором обеспечивается желаемое значение напора. Подлежащая контролю девиация между желаемым и фактическим напором является, поэтому, заранее ограниченной при достижении ротором максимального числа оборотов.
Фиг.7 показывает сравнительный график значений напора и величины потока, а фиг.8 показывает кривую давления в желудочке в процессе работы насоса при постоянном числе оборотов. Видно, что насос и в диастолической фазе обеспечивает опустошение сердечной камеры. Желаемой декомпрессии в сердце не достигается.
Способ, примененный в этом варианте конструкции, не только исключает необходимость в сенсорных устройствах, вносящих нежелательные возмущения и порождающих дополнительные расходы, но также обеспечивает пульсирующий характер потока в системе подачи жидкости без необходимости применения методов синхронизации.
Список элементов чертежей
1 - Корпус насоса;
2 Железный кожух, замыкающий магнитное поле;
2а Железный кожух, замыкающий магнитное поле;
3 Постоянное число оборотов;
4 Непостоянное число оборотов;
5 Ротор;
6 Направляющая;
7 Направляющая;
8 Выходное давление, равное артериальному давлению;
9 Входное давление, равное венозному давлению;
10 Входное давление без насоса;
11 Входное давление при активном ограничении числа оборотов;
12 Управляющая катушка;
12а Управляющая катушка;
13 Ограничение с негативным значением;
14 Ограничение с положительным значением;
15 Интенсивность потока;
16 Напор (перепад давлений);
17 Напор при активном ограничении числа оборотов;
18 Число оборотов ротора;
19 Число оборотов ротора при ограничении максимального значения;
21 Ветвь;
22 Ветвь;
23 Компаратор;
24 Ветвь;
25 Ветвь;
26 Ветвь;
27 Компаратор;
28 Заданное значение числа оборотов ротора;
29 Компаратор;
30 Ограничение числа оборотов;
31 Пакет металлических пластин;
32 Сердечник;
33 Обмотка;
34 ПИД-регулятор;
41 Постоянный магнит;
41а Постоянный магнит;
42 Постоянный магнит;
42а Постоянный магнит;
43 Сенсорная катушка;
43а Сенсорная катушка;
k Усилитель управления;
k1 Усилитель управления;
80 Замкнутое кольцо;
80а Замкнутое кольцо.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕКАЧКИ ОДНОФАЗНЫХ ИЛИ МНОГОФАЗНЫХ ЖИДКОСТЕЙ БЕЗ ИЗМЕНЕНИЯ ИХ СВОЙСТВ | 2000 |
|
RU2266141C2 |
| СПОСОБ ПОЗИЦИОННОГО КОНТРОЛЯ ВРАЩАЮЩЕГОСЯ ЭЛЕМЕНТА, УДЕРЖИВАЕМОГО ПОСТОЯННЫМ МАГНИТНЫМ ПОЛЕМ | 2002 |
|
RU2277936C2 |
| МЕХАНИЗМ ДЛЯ УВЕЛИЧЕНИЯ ЖЕСТКОСТИ ДЛЯ ПОДШИПНИКА НА МАГНИТНОЙ ПОДВЕСКЕ, ПОДШИПНИК НА МАГНИТНОЙ ПОДВЕСКЕ И НАСОС ДЛЯ КРОВИ | 2020 |
|
RU2772509C1 |
| УСТРОЙСТВО ДЛЯ АКСИАЛЬНОГО НАГНЕТАНИЯ ЖИДКОСТЕЙ | 2002 |
|
RU2326268C2 |
| ЭЛЕКТРОНАСОС С ДВИГАТЕЛЕМ НА ПОСТОЯННЫХ МАГНИТАХ | 2012 |
|
RU2533795C2 |
| Электрический мотор с аксиальным магнитным потоком | 2023 |
|
RU2810539C1 |
| НАСОС ВСПОМОГАТЕЛЬНОГО КРОВООБРАЩЕНИЯ С ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ | 2022 |
|
RU2805828C1 |
| НАСОС ВСПОМОГАТЕЛЬНОГО КРОВООБРАЩЕНИЯ С ТОРЦЕВЫМ ДВИГАТЕЛЕМ | 2020 |
|
RU2744482C1 |
| РАДИАЛЬНОЕ ВИБРАЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2569950C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРО-ДИФФЕРЕНЦИАЛАМИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794720C1 |
Изобретение относится к медицине, а более конкретно касается обеспечения вспомогательного кровообращения. Способ позволяет добиться того, что вспомогательный насос оказывает поддержку только в стадии нагнетания главного насоса. При этом перепад давлений между входом и выводом вспомогательного насоса постоянно контролируют, и число оборотов вспомогательного насоса регулируют таким образом, что контролируемый перепад давлений не опускается ниже определенного значения, а интенсивность потока не снижается ниже нулевой отметки. 4 з.п. ф-лы, 8 ил.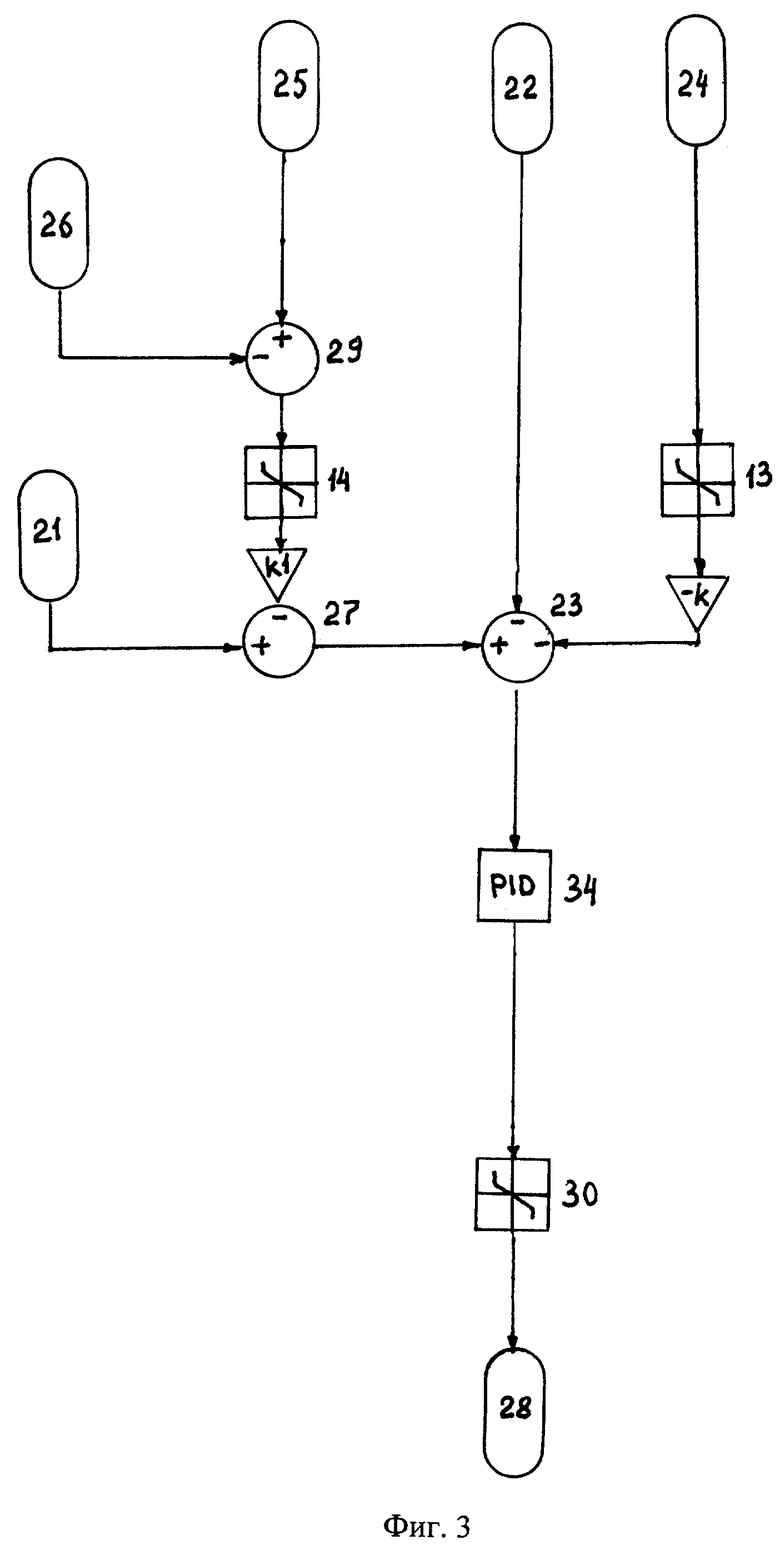
| WO 00/64030 A1, 26.10.2000 | |||
| US 6129660 А, 10.10.2000 | |||
| US 4598697 А, 08.07.1986 | |||
| DE 19919625 А, 30.11.2000 | |||
| US 4782817 A, 08.11.1988 | |||
| US 4846152 A, 11.07.1989 | |||
| Устройство для программного управления манипулятором | 1982 |
|
SU1070511A1 |
| Способ управления аппаратом вспомогательного кровообращения | 1985 |
|
SU1600779A1 |

