ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к системе и способу определения положения подвижной части, например ротора механизма, в частности, электрической машины, и включает кодирующее устройство, прикрепленное к ротору и выполненное с возможностью перемещения вместе с ним, и стационарный сенсорный блок, расположенный напротив кодирующего устройства и выдающий по меньшей мере один сигнал, на основе которого можно определить указанное положение.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
Устройство и способ, аналогичные описанным выше, известны из публикации WO 02/084849 A1. Устройство, описанное в этом документе, имеет прикрепленное к ротору кольцо с поочередно намагничиваемыми отдельными сегментами. Напротив намагничиваемых кольцевых элементов расположены стационарные магнитные сенсоры. Изменение индукции в отдельных сегментах намагничиваемых сенсорных колец приводит к поочередному изменению намагниченности сенсоров. При этом сенсоры вырабатывают колебательные сигналы со смещением по фазе, и из указанных сигналов можно вычислить аналоговые сигналы, используемые для описания углового положения ротора.
Так как известный сенсор основан на принципе магнитных измерений, он чувствителен к магнитным и электрическим помехам. Это особенно неудобно, если сенсор предназначен для использования в автомобилях, в которых он подвержен воздействию жестких внешних условий, и в двигателях которых может возникать ток до 1000 ампер.
Таким образом, задачей настоящего изобретения является создание системы и способа определения положения подвижной части, например ротора, в сочетании с взаимосвязанным процессом измерения, который может быть менее чувствителен к помехам в виде магнитных и электрических полей.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Задача изобретения решена благодаря вышеупопянутой системе, в которой сенсорный блок включает первый индуктивный компонент и в которой кодирующее устройство выполнено с возможностью изменения индуктивности индуктивного компонента в зависимости от перемещения или положения.
Когда кодирующее устройство перемещают по отношению к сенсорному блоку благодаря перемещению подвижной части (вращательного тела), которое в конкретных вариантах выполнения может представлять собой ротор электрической машины, характеристики по меньшей мере индуктивности сенсорного блока меняются в зависимости от положения кодирующего устройства таким образом, что при соответствующем управлении сенсорным блоком соответственно меняются амплитуда, и/или фаза, и/или частота выходного сигнала. Таким образом, в системе по настоящему изобретению потери на вихревые токи кодирующего устройства, если оно, в отличие от обычных технологий, по меньшей мере частично содержит проводящий материал, могут быть использованы для воздействия на сигналы сенсорного блока, благодаря чему предложенная система может быть значительно более устойчива к электромагнитным помехам по сравнению с известными процессами магнитных измерений.
Иными словами, функционирование системы основано на изменениях индуктивности этого индуктивного компонента.
Для этого кодирующее устройство может быть выполнено таким, что ширина и площадь или проводимость в целом меняются, например в соответствии с его положением. Например, когда ширина и площадь кодирующего устройства напротив индуктивного компонента меняются, индуктивность индуктивного компонента также меняется, так как меняется величина потерь на вихревые токи в кодирующем устройстве.
Согласно одному из предпочтительных вариантов выполнения настоящего изобретения кодирующее устройство включает структуру, периодически изменяющуюся в зависимости от угла. Например, могут изменяться ширина и площадь. В этом случае сенсорный блок может выдавать периодически изменяющийся сигнал, на основе которого может быть определено угловое положение.
Может быть предпочтительным, чтобы изменяющаяся структура имела синусоидальную конфигурацию. При такой конструкции сигнал сенсорного блока будет сглажен благодаря синусоидальной дорожке кодирующего устройства, что позволяет проводить высокоэффективные оценку или измерение положения кодирующего устройства. В других вариантах выполнения кодирующее устройство может иметь иные "сглаживающие конфигурации", например треугольную структуру или по меньшей мере частично прямоугольную структуру, в которой ширина изменяется по меньшей мере ступенчато, и т.п. В целом, могут быть использованы другие конфигурации, позволяющие установить однозначную зависимость между изменением сигнала, вызванным изменением индуктивности, и положением ротора.
Кодирующее устройство предпочтительно может быть расположено на кольце с внутренней или внешней в радиальном направлении стороны ротора. При такой конфигурации период определения угла при механическом вращении ротора - если рассматривается механизм, снабженный ротором - может постоянно повторяться. Если кодирующее устройство прикреплено к внутренней стороне ротора, может быть предпочтительным разместить сенсорный блок на внутренней стороне напротив кодирующего устройства. С другой стороны, если кодирующее устройство прикреплено к ротору на внешней стороне, сенсорный блок обычно расположен снаружи ротора.
В других вариантах выполнения кодирующее устройство расположено на роторе в осевом направлении. Следовательно, соответствующий сенсорный блок подходящей конфигурации может быть расположен в осевом направлении ротора.
Согласно одному из предпочтительных вариантов выполнения настоящего изобретения, сенсорный блок включает по меньшей мере сенсорную систему, содержащую две резонансные схемы, питаемые от источника переменного тока, содержащие индуктивные компоненты и вырабатывающие выходные сигналы, включающие информацию о положении в сглаженном состоянии при воздействии на индуктивность кодирующего устройства. Из резонансных схем может быть получен фазовый сдвиг и/или разность амплитуд, которые меняются в зависимости от положения кодирующего устройства. В этом случае точность сенсорной системы определяется пределами допуска компонентов источника переменного тока и компонентов резонансных схем, что обеспечивает эффективное функционирование системы, основанное на достаточном качестве соответствующих компонентов. Резонансные схемы могут быть последовательными или параллельными.
В других вариантах выполнения индуктивные компоненты сенсорного блока используют в качестве компонентов осцилляторов, связанных с ним, а разность частот осцилляторов, вызванная изменением индуктивности, может быть оценена или вычислена для получения требуемой информации о положении.
В особенно предпочтительном варианте выполнения настоящего изобретения сенсорный блок включает по меньшей мере две идентичные сенсорные системы описанного выше типа, которые механически смещены по отношению друг к другу. Благодаря механическому смещению, сенсорные системы могут вырабатывать сигналы одинаковой формы со сдвигом по времени, которые соответствуют различным положениям кодирующего устройства и которые могут быть использованы для точного определения его абсолютного положения.
Согласно одному из предпочтительных вариантов выполнения настоящего изобретения, сенсорные системы сенсорного блока расположены в непосредственной близости друг от друга. В этом случае радиальное биение или нарушение баланса ротора и прикрепленного к нему кодирующего устройства может быть учтено благодаря по существу идентичным изменениям выходных сигналов сенсора.
Предпочтительно за сенсорным блоком расположена схема, преобразующая по меньшей мере один сенсорный сигнал в сигнал, содержащий информацию о положении. При помощи этой схемы разность фаз и/или амплитуд, и/или частот, измеренная сенсорным блоком, может быть преобразована в сигнал, который может непосредственно представлять определяемое угловое положение.
В некоторых вариантах выполнения может быть предпочтительным, если эта схема включает симметричные каналы для разведения и обработки сигналов сенсорного блока. Если выходные сигналы сенсорного блока идентичны по форме, может быть обеспечена идентичная обработка сенсорного сигнала благодаря симметричной конфигурации каналов схемы. В этом случае обработанные сенсорные сигналы могут быть обработаны для получения высокоточного выходного сигнала.
В некоторых вариантах выполнения сенсорные системы расположены со смещением, в частности, на 90°. В этом случае, если, например, блок кодирующего устройства имеет соответствующую конфигурацию, может быть выработан синусоидальный и косинусоидальный сигнал.
Предпочтительно частота источника переменного напряжения, используемого для выработки колебаний в сенсорном блоке, составляет от 500 кГц до примерно 5 МГц. В указанном диапазоне на сенсорный блок могут высокоэффективно воздействовать потери на вихревые токи кодирующего устройства.
В некоторых вариантах выполнения резонансные схемы настроены на частоту источника переменного тока. Таким образом можно достичь баланса резонансных схем по отношению к технологическим допускам для получения высокой чувствительности при измерениях, при этом может быть выбрана подходящая рабочая частота вблизи резонансной частоты сенсорного блока со сглаженным сигналом.
Особенно предпочтительно, если сигнал, содержащий информацию о положении, включает синусоидальный и косинусоидальный сигналы, а за сенсорным блоком расположен вычислительный модуль, который может вычислить арктангенциальную функцию из синусоидального и косинусоидального сигналов. Таким образом, угловое положение может быть выражено непосредственно.
Согласно еще одному аспекту настоящего изобретения предложена сенсорная система для определения угла поворота, включающая вращательное тело и кодирующее устройство, прикрепленное с возможностью вращения к этому вращательному телу. Кроме того, система включает стационарный сенсорный блок, включающий по меньшей мере один индуктивный компонент и расположенный напротив указанного кодирующего устройства на некотором расстоянии от него. Сенсорная система для определения угла поворота отличается тем, что указанный по меньшей мере один индуктивный компонент выполнен плоским.
Задача настоящего изобретения также решена при помощи способа определения положения подвижной части механизма, например ротора. Способ включает изменение индуктивности сенсорного блока при изменении положения кодирующего устройства, соединенного с подвижной частью, и определение изменения индуктивности сенсорного блока. Кроме того, положение подвижной части определяют на основе определенного изменения индуктивности.
Этот способ, основанный на токовихревом принципе, обеспечивает достаточную нечувствительность определения положения подвижной части к помехам в виде магнитных и электрических полей.
Изменение индуктивности может быть определено по разнице фаз двух осциллирующих сенсорных систем сенсорного блока.
Таким образом может быть обеспечена эффективная оценка, например на основе резонансных схем сенсорного блока, а зависящие от положения потери на вихревые токи в кодирующем устройстве можно оценить с высокой точностью. Для этой цели оценку можно проводить на основе аналогового сигнала с соответствующей разностью фаз.
В одном из предпочтительных вариантов выполнения изменение индуктивности определяют на основе разности амплитуд двух осциллирующих сенсорных систем сенсорного блока.
Еще в одном предпочтительном варианте выполнения изменение индуктивности определяют на основе разности частот двух осциллирующих сенсорных систем сенсорного блока.
В этих случаях могут быть использованы стандартные устройства для обработки сигналов, такие как микроконтроллер или микропроцессор, благодаря чему достигают высокую степень гибкости конструкции.
Согласно еще одному аспекту настоящего изобретения, его задача решена при помощи системы, описанной во вступительной части, в которой сенсорный блок включает первый индуктивный компонент, являющийся катушкой без магнитного ядра, и в которой кодирующее устройство выполнено таким, что оно обеспечивает зависимое от положения значение индуктивности индуктивного компонента.
В дополнение к преимуществам, описанным выше, благодаря отсутствию материала магнитного ядра в катушке, внешние магнитные поля не участвуют в намагничивании или насыщении сенсорного блока, так что полученные выходные сигналы могут быть умеренно нечувствительны к сильным магнитным полям, которые могут существовать, в частности, в электрических машинах.
Для этого проводимость кодирующего устройства изменяют в зависимости от угла, благодаря чему достигают высокой степени гибкости зависимой от положения структуры кодирующего устройства.
В одном из вариантов выполнения проводящий материал представлен в виде по меньшей мере одной дорожки, по которой проходит катушка при перемещении подвижной части. Указанная по меньшей мере одна дорожка может быть выполнена различными способами в различных подходящих местах, например вне сильных полей помех и т.п. Дорожка может быть вмонтирована в часть ротора или прикреплена к ротору при помощи подходящего крепления.
В одном из вариантов выполнения ширина дорожки изменяется вдоль направления движения, благодаря чему достигают эффективной зависящей от положения модуляции проводимости.
Еще в одном варианте выполнения по меньшей мере одна дорожка имеет постоянную ширину по меньшей мере в пределах некоторого участка, а модуляция проводимости на этом участке может быть получена другими методами, например управляемым регулированием поверхностного сопротивления и т.д. Путем изменения ширины различных участков с зависимой от положения проводимостью можно регулировать соответствующее отклонение, благодаря чему обеспечивают возможность дополнительного кодирования информации по меньшей мере на одну дорожку.
В одном из иллюстративных вариантов выполнения часть площади, содержащая электропроводящий материал, изменяется в пределах некоторого участка вдоль направления движения, благодаря чему обеспечивают эффективную модуляцию. Для этого можно выборочно удалить специально наносимый материал или нанести на основной материал ротора соответствующий узор для получения части площади с зависимой от положения проводимостью.
В этом случае среднюю проводимость можно изменять по меньшей мере в пределах участков в направлении движения, обеспечивая возможность получения низкого и высокого разрешения при определении положения в пределах одной дорожки. Например, требуемое угловое разрешение может зависеть от количества полюсных пар, а низкое разрешение может относиться к положению различных полюсных пар, и, таким образом, к положению для полного оборота.
Еще в одном варианте выполнения кодирующее устройство содержит первую и вторую дорожки, а сенсорный блок включает вторую катушку без магнитного ядра, причем первая катушка направлена вдоль первой дорожки, а вторая катушка направлена вдоль второй дорожки. В этом случае размеры сенсорного блока в направлении движения могут быть уменьшены путем использования нескольких катушек и/или дорожек, имеющих различное пространственное разрешение.
Еще в одном варианте выполнения подвижная часть выполнена из основного материала, а кодирующее устройство реализовано путем изменения проводимости части основного материала. В этом случае кодирующее устройство может быть выполнено на основе существующих компонентов подвижной части, благодаря чему могут быть снижены объем, требуемый для кодирующего устройства, а также, возможно, трудоемкость изготовления.
Еще в одном варианте выполнения подвижная часть выполнена из проводящего основного материала, а кодирующее устройство выполнено путем прикрепления к основному материалу или внедрения в основной материал материала с уменьшенной проводимостью или увеличенной проводимостью. Например, слой высокопроводящего материала может быть непосредственно осажден на подвижную часть, если она выполнена из материала со сравнительно низкой проводимостью. Например, основной материал включает сталь, а материал кодирующего устройства включает медь, медный сплав, серебро, его сплавы и т.п.
Материал, используемый для выполнения кодирующего устройства, может быть внедрен в основной материал, благодаря чему получают по существу плоскую поверхность.
Еще в одном варианте выполнения толщина слоя материала составляет менее 40 мкм и предпочтительно составляет от 2 мкм до 35 мкм.
Еще в одном варианте выполнения кодирующее устройство включает проводящую перфорированную или штампованную часть. В этом случае модуляция проводимости может быть достигнута при использовании экономичного производственного процесса, который может быть применен в серийном производстве с уменьшенными технологическими допусками.
Еще в одном варианте выполнения кодирующее устройство включает рельефную проводящую структуру, благодаря чему обеспечивают указанные выше преимущества.
Еще в одном варианте выполнения кодирующее устройство включает печатную проводящую структуру. В этом случае может быть выполнена дорожка практически любой формы, так что, основываясь на оценке сенсорных сигналов, можно выбрать подходящую структуру и изготовить ее с высокой воспроизводимостью и очень точно определенными размерами в длину и ширину.
Еще в одном варианте выполнения кодирующее устройство включает прессованную интегральную схему. По этой технологии могут быть выполнены соответствующие трехмерные проводящие структуры, которые можно таким образом адаптировать к форме ротора или других материалов основы.
Кроме применения различных форм кодирующего устройства, описанных выше, проводимость можно изменять ступенчато, таким образом реализуя ступенчатую функцию, которая может служить аппроксимацией требуемой формы, например синусоидальной формы, что упрощает производство проводящей структуры.
Кроме описанных выше катушек, в некоторых вариантах выполнения первая катушка включает плоскую катушку. При такой форме может быть достигнуто уменьшение объема посредством использования различных технологий производства и материалов основы.
Например, плоская катушка выполнена в виде проводящей линии на материале основы. В этом случае используют известные производственные процессы, применяемые в области печатных плат, а также в области производства полупроводников. Соответственно, могут быть использованы подходящие материалы, такие как FR4, керамика и т.п. Однако при использовании соответствующих производственных технологий могут быть использованы другие подложки, например диэлектрики, полупроводники и т.п.
В одном из вариантов выполнения части плоской катушки сформированы на различных слоях материала основы, благодаря чему каждый отдельный слой может быть выполнен по плоской производственной технологии с обеспечением, несмотря на это, большого числа витков. Например, материал основы включает многослойную плату.
Еще в одном варианте выполнения материал основы представляет собой фольгу, благодаря чему катушке можно придать требуемую форму с целью повышения эффективности или повышения степени ее интеграции в механизм.
Кроме того, материал основы может быть прессованной интегральной схемой.
Еще в одном варианте выполнения первая катушка включает катушку с обмоткой, смонтированную на материале основы. В этом случае может быть получено большое число витков и, следовательно, высокая эффективность, а катушка имеет характеристики катушки с воздушным зазором, обеспечивая пониженную чувствительность к помехам, как было описано выше.
Еще в одном варианте выполнения сенсорный блок включает вторую осциллирующую схему, содержащую катушку, которая может иметь по существу такую же конфигурацию, что и первая катушка.
Еще в одном варианте выполнения первая и вторая катушки расположены вдоль направления движения ротора с зазором, который соответствует разности фаз в 180° отдельных выходных сигналов первой и второй катушек. Таким образом, получая разность соответствующих сигналов, можно эффективно подавить помехи.
Кроме вариантов выполнения, относящихся к схеме, используемой для получения выходного сигнала или сигналов сенсорного блока, в одном из предпочтительных вариантов сенсорный блок и схема пространственно отделены друг от друга и соединены посредством проводного соединения, например кабеля. В этом случае сенсорный блок может быть расположен в механизме независимо от схемы, а для схемы может быть выбрано подходящее положение в зависимости, например от внешних условий.
Еще в одном варианте выполнения предложен сенсорный блок без активных электронных компонентов, что позволяет разместить или вмонтировать его в областях с повышенной температурой без предъявления повышенных требований к схеме, которые при необходимости их соблюдения могут привести к увеличению стоимости производства.
Еще в одном аспекте настоящее изобретение относится к способу изготовления сенсорной системы для определения положения ротора механизма. Способ включает обеспечение кодирующего устройства, вращаемого с ротором и имеющего проводимость, зависимую от углового положения ротора. Способ также включает обеспечение сенсорного блока, который может быть размещен стационарно по отношению к кодирующему устройству и который может выдавать зависимый от угла выходной сигнал, определяемый вихревыми токами, наводимыми в кодирующем устройстве. Кроме того, используют электронную схему для обработки зависимого от угла выходного сигнала, причем по меньшей мере указанная электронная схема получена литьевым прессованием. При этом достигнута повышенная надежность схемы, в частности, в сложных условиях, характерных для автомобилей.
В одном из вариантов выполнения электронная схема получена литьевым прессованием и сформирована непосредственно на основе, благодаря чему обеспечивают экономичный производственный процесс. В других случаях электронную схему устанавливают в корпус, который изготавливают литьевым прессованием по существу без воздушных полостей.
Еще в одном варианте выполнения сенсорный блок и электронную схему изготавливают литьевым прессованием совместно, благодаря чему получают компактную структуру.
Еще в одном варианте выполнения обеспечение кодирующего устройства включает изменение проводимости части ротора механизма. При этом компоненты, необходимые для изготовления ротора, могут быть также использованы для формирования кодирующего устройства, что дает преимущество в размерах, стоимости производства и т.п.
Изменение проводимости может включать осаждение электропроводящего материала на основном материале ротора и/или внедрение в него электропроводящего материла.
В одном из вариантов выполнения обеспечение кодирующего устройства включает формирование проводящей структуры путем перфорации, штамповки, тиснения, печати или трехмерного литья.
В одном из вариантов выполнения сенсорный блок и электронная схема соединены кабельным соединением, благодаря чему электроника может быть расположена вне областей, подвергаемых повышенному воздействию внешней среды.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предпочтительные варианты выполнения определены в формуле изобретения. Кроме того, ниже описаны варианты выполнения изобретения со ссылками на приложенные чертежи, в которых:
фиг. 1А-1Е иллюстрируют примеры сенсорной системы согласно вариантам выполнения настоящего изобретения, включающей последовательные и параллельные резонансные схемы, осцилляторы и соединенные с ними индуктивности, и предназначенной для определения изменений индуктивности, вызванных кодирующим устройством;
фиг. 2 схематически иллюстрирует расположение сенсорных катушек по отношению к кодирующему устройству и соответствующие сенсорные сигналы, полученные от него, согласно одному из вариантов выполнения настоящего изобретения;
фиг. 3А и 3В иллюстрируют форму сенсора для определения угла поворота согласно настоящему изобретению;
фиг. 4А-4С иллюстрируют форму сенсора для определения угла поворота согласно настоящему изобретению;
фиг. 5А и 5В иллюстрируют форму сенсора для определения угла поворота согласно настоящему изобретению;
фиг. 6А и 6В иллюстрируют пример конфигурации стационарного сенсорного блока, использованного на фиг. 4;
фиг. 7А-7С иллюстрируют примеры конфигурации индуктивных компонентов;
фиг. 8 иллюстрирует положение, когда индуктивные компоненты и кодирующее устройство расположены напротив друг друга;
фиг. 9А-9С иллюстрируют другие примеры конфигураций индуктивных компонентов;
фиг. 10А и 10В иллюстрируют пример конфигурации кодирующего устройства согласно одному из вариантов выполнения настоящего изобретения;
фиг. 11А и 11В иллюстрируют другие примеры конфигураций кодирующих устройств;
фиг. 12 иллюстрирует пример конфигурации, когда кодирующее устройство выполнено на своем вращательном теле;
фиг. 13А-13С схематически иллюстрируют функционирование схем, используемых в вариантах выполнения настоящего изобретения для оценки разности фаз, разности амплитуд и разности частот соответственно;
на фиг. 14 представлена функциональная схема варианта выполнения схем, изображенных на фиг. 13А;
фиг. 15 схематически иллюстрирует, как может быть достигнуто оптимальное изменение амплитуды согласно настоящему изобретению;
фиг. 16А и 16В схематически иллюстрируют осевое расположение сенсорной системы;
фиг. 16С изображает радиальное расположение сенсорной системы;
фиг. 16D-16G схематически иллюстрируют различные дорожки для модуляции проводимости согласно иллюстративным вариантам выполнения;
фиг. 16Н иллюстрирует прикрепление или осаждение дорожки на материал основы;
фиг. 16I-16L изображают различные катушки с воздушным зазором, используемые в сенсорной системе согласно настоящему изобретению;
фиг. 16М и 16N иллюстрируют различные кодирующие дорожки и соответствующие катушки других вариантов выполнения; и
фиг. 16О схематически иллюстрирует сенсорную систему, в которой схема и катушка пространственно отделены друг от друга.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг. 1А-1Е иллюстрируют основные структуры сенсорных систем 5, используемых в одном из вариантов выполнения настоящего изобретения.
Система 5 представляет собой индуктивный позиционный сенсор, на практике включающий две резонансные схемы 6а и 6b, соединенные параллельно согласно варианту выполнения, изображенному на фиг. 1А. Схема 6а включает катушку, или индуктивность, L1, резистор R-a и емкость C-a, соединенные последовательно, а схема 6b включает катушку, или индуктивность, L2, резистор R-b и емкость C-b, соединенные последовательно.
Индуктивности L1 и L2 предпочтительно имеют плоскую конфигурацию. Емкости C-a и C-b в этом варианте выполнения являются отдельными устройствами, показанными для примера.
Напряжение на две схемы 6а и 6b подают от источника V переменного напряжения, соединенного параллельно с обеими схемами. Частоту f источника V обычно устанавливают в диапазоне от 500 кГц до примерно 5 МГц.
Последовательные схемы 6а и 6b синхронизированы с частотой f источника V и приведены в нерабочее состояние, более конкретно, в состояние вблизи резонансной частоты без затухания. Таким образом, возможно достичь высокой чувствительности последовательных схем 6а и 6b, и в этом случае путем правильного выбора рабочей частоты определенная степень пределов допуска интервала между кодирующим устройством и индуктивными компонентами L1, L2 может быть компенсирована, как описано ниже со ссылкой на фиг. 15. Точность такой настройки определяют в зависимости от пределов допуска компонентов схемы источника V и в зависимости от устройств L, R и С последовательных резонансных схем 6а и 6b. Чем меньше эти пределы допуска, тем выше рабочие характеристики системы 5.
В случае если подвижная проводящая структура, которой является кодирующее устройство, входит в магнитные поля индуктивностей L1 и L2, выработанный вихревой ток вызывает разность фаз между двумя схемами 6а и 6b. Эта разность фаз на практике зависит от кодирующего устройства и качества резонансных схем 6а и 6b, как подробно описано ниже. В некоторых случаях максимальная разность фаз составляет +/-90°, а конкретно dPhi 180°.
Фиг. 1В иллюстрирует вариант выполнения, в котором схемы 6а и 6b представляют собой параллельные резонансные схемы, а сигналы получают от соответствующих узловых точек между соответствующими резисторами R-a, R-b и параллельными резонансными схемами, соединенными с соответствующими резисторами. Также в этом случае возможно получение разности фаз, зависимой от изменений индуктивности, создаваемой кодовым датчиком.
Фиг. 1С иллюстрирует еще один вариант выполнения, в котором схемы 6а и 6b представляют собой последовательные резонансные схемы. В этом случае получают разность dUss максимальных напряжений обеих схем, т.е. разность амплитуд, служащую основой для изменений индуктивности, дающей информацию о положении.
Фиг. 1D иллюстрирует вариант выполнения, в котором схемы 6а и 6b выполнены как параллельные резонансные схемы для определения разности dUss амплитуд.
Фиг. 1Е иллюстрирует вариант выполнения, в котором компоненты L1 и L2 соединены с соответствующими осцилляторами Os1 и Os2. Таким образом, эти компоненты частично формируют соответствующие осцилляторы для определения колебательных характеристик при изменении индуктивности. Благодаря этому определяют разность df частот.
Фиг. 2 схематически иллюстрирует конфигурацию кодирующего устройства 3, связанного с сенсорным блоком 4. В этом варианте выполнения блок 4 включает первую сенсорную систему 5а, содержащую компоненты L1 и L2 сенсорной системы 5, показанной на фиг. 1, вторую сенсорную систему 5b, содержащую индуктивные компоненты L3 и L4, и дополнительно включает схему 8 обработки сигнала, из которой получают сигнал зависимости напряжения U от времени t согласно одному из вариантов выполнения настоящего изобретения.
В варианте выполнения, описанном ниже, устройство 3 прикреплено к поверхности цилиндрического кольца 7, соединенного с подвижной частью, представляющей собой в данном варианте выполнения ротор 2 электрического двигателя 1. Таким образом, устройство 3 можно перемещать с подвижной частью. В одном из вариантов выполнения под электрическим двигателем подразумевают механизм, в котором реализовано возбуждение от постоянного магнита, и в котором угловой сигнал использован для выпрямления тока. Однако еще в одном варианте выполнения настоящего изобретения устройство 3 может быть расположено на внутренней стороне ротора 2 в радиальном направлении. Еще в одном предпочтительном варианте выполнения настоящего изобретения устройство 3 может также быть расположено в осевом направлении ротора 2.
В варианте выполнения, представленном на этом чертеже, устройство 3 синусоидальной формы расположено в кольце 7 внешней в радиальном направлении части ротора 2. Синусоидальная форма, используемая в данном случае, предпочтительна, так как устройство 3 может обеспечить участок затухания, который имеет синусоидальную форму, и благодаря которому сенсорный сигнал 9, регистрируемый сенсорной системой 5, после обработки имеет синусоидальную форму, что обеспечивает удобство оценки и/или вычисления.
В принципе, в качестве устройства 3 может быть использована другая структура, изменяющаяся в зависимости от угла. Например, в качестве кодирующего устройства может быть использована повторяющаяся треугольная структура. Кроме того, можно использовать другую форму, обеспечивающую изменение индуктивности в зависимости от положения, например прямоугольную структуру со ступенчатыми изменениями ширины.
Кодирующее устройство 3 может быть выполнено из алюминия, стали, меди, монтажной платы, проводящей фольги или пластика, содержащего металл. Единственным требованием является проводимость устройства или наличие в нем проводящего элемента конструкции. Не обязательно, чтобы устройство являлось магнитом.
Сенсорные катушки L1 и L2 в форме схем 6а и 6b первой сенсорной системы 5а, например, расположены напротив устройства 3, а сенсорные катушки L3 и L4 сенсорной системы 5b расположены с угловым смещением 90°. Индуктивности L1, L2 и L3, L4 сенсоров расположены напротив устройства 3 таким образом, что их соответствующие пары смещены на угол 180°, и, следовательно, соответствующие пары в системах 5а и 5b могут вырабатывать разностные сигналы. Каждый из этих сигналов содержит информацию о положении подвижной части ротора 2. Так как имеются две системы 5а и 5b, могут быть получены два разностных сигнала с фазовым сдвигом 90° в соответствии с конфигурацией устройства 3, например синусоидальный и косинусоидальный сигналы. Также из указанных двух сигналов можно получить абсолютное положение, то есть также возможно определить направление движения устройства 3.
В сенсоре для определения угла поворота в соответствии с настоящим изобретением основными элементами конструкции являются кодирующее устройство, представляющее собой элемент, вырабатывающий вихревые токи, и прикрепленное к подвижной части, например вращательному телу, такому как ротор, и индуктивные компоненты или стационарный сенсорный блок, содержащий встроенные индуктивные компоненты, расположенные напротив кодирующего устройства.
Иными словами, сенсор для определения угла поворота может иметь различные конструкции, при условии, что вышеупомянутые кодирующее устройство и индуктивные компоненты или стационарное сенсорное устройство расположены напротив друг друга. Преимуществом такого сенсора для определения угла поворота является возможность его адаптации к различным вариантам использования и увеличение свободы выбора конструктивных решений.
Формы сенсора для определения угла поворота в соответствии с настоящим изобретением показаны на фиг. 3-5. На каждой из фиг. 3-5 фиг. А иллюстрирует эскизный чертеж конструкции (перспективный вид основной части) сенсора для определения угла поворота, а фиг. В иллюстрирует пример установки (чертеж с частичным сечением), на котором сенсор для определения угла поворота, изображенный на фиг. А, использован в двигателе.
Ниже каждая из форм описана подробно.
Фиг. 3 иллюстрируют форму сенсора для определения угла поворота, при которой устройство 3 расположено в радиальном направлении на внутренней периферической поверхности ротора 2, а стационарный сенсорный блок 4 расположен напротив устройства 3.
Фиг. 4 иллюстрируют форму сенсора для определения угла поворота, при которой устройство 3 расположено в осевом направлении ротора 2 на боковой стороне ротора, а стационарный блок 4 расположен напротив устройства 3.
Фиг. 5 иллюстрируют форму сенсора для определения угла поворота, при которой устройство 3 расположено в радиальном направлении на внешней периферической поверхности ротора 2, а стационарный блок 4 расположен напротив устройства 3.
В сенсоре 31 для определения угла вращения, показанном на фиг. 3А, устройство 3 выполнено в радиальном направлении на внутренней периферической поверхности ротора 2, точнее, на внутренней периферической поверхности цилиндрической части 2b ротора 2, которая прикреплена к валу 2а ротора. Далее, стационарный блок 4 расположен внутри напротив устройства 3.
Необходимо отметить, что стационарный блок 4 показан на фиг. 3А слева в разобранном виде отдельно от ротора 2 и устройства 3. На последующих фиг. 4А и фиг. 5А стационарный блок 4 показан аналогичным образом.
Сенсор 31 имеет конструкцию, которая может служить примером установки сенсора радиального типа в двигатель, например, так называемый синхронный двигатель с постоянным магнитом или бесщеточный двигатель с постоянным магнитом и внутренним ротором. На поверхности ротора 2 этого двигателя расположен магнит, а, например, в центральной части ротора 2 имеется зазор. Так как сенсор 31 имеет конфигурацию, показанную на фиг. 3А, он может быть расположен в роторе 2, и, соответственно, преимуществом является то, что нет необходимости увеличивать длину вала двигателя и т.п. для размещения на нем сенсора.
Фиг. 3В иллюстрирует пример установки при использовании сенсора 31, изображенного на фиг. 3А, в двигателе с внутренним ротором. Двигатель, показанный на фиг. 3В, представляет собой двигатель с внутренним ротором, а конкретно двигатель 110 с внутренним ротором. На поверхности (на внешней периферической поверхности) ротора 2 двигателя 110 расположен магнит 41, а его статор 43, имеющий катушку 42, расположен напротив магнита 41. Далее, сенсор 31, представленный на фиг. 3А, выполнен таким образом, что устройство 3 расположено на внутренней периферической поверхности ротора 2, а стационарный блок 4 расположен напротив устройства 3. Стационарный блок 4 расположен в компоненте 43а, проходящем от статора 43 в направлении, параллельном вращательному валу. Сердечник статора 43 выполнен из многослойной пластины, содержащей стальные электромагнитные листы.
Так как двигатель имеет зазор в центральной части ротора 2, а сенсор 31 может быть расположен в роторе 2, как описано выше, нет необходимости увеличивать длину вала двигателя 110 для установки сенсора 31.
В сенсоре 32 для определения угла вращения, представленном на фиг. 4А, устройство 3 выполнено в осевом направлении ротора 2, иными словами, в направлении, вертикальном по отношению к радиальному направлению, т.е. на боковой стороне ротора 2, точнее, на боковой стороне пластинчатой части 2 с ротора 2, который прикреплен к валу 2а. Далее, стационарный блок 4 расположен на внутренней стороне напротив устройства 3.
Сенсор угла 32 имеет конструкцию, которая может служить в качестве примера установки сенсора осевого типа в двигатель, в котором, например, между статором на внешней стороне и ротором 2 на внутренней стороне действует сила. Более конкретно, статор расположен справа снаружи ротора 2, а двигатель имеет зазор на боковой стороне ротора 2 и вышеописанную конструкцию. Таким образом, так как сенсор 32 имеет конструкцию, представленную на фиг. 4А, этот сенсор 32, содержащий устройство 3 и стационарный блок 4, может быть расположен в указанном зазоре, и благодаря этому имеет преимущество, состоящее в легкости установки.
Фиг. 4В иллюстрирует пример установки при использовании сенсора 32, изображенного на фиг. 4А, в двигателе с внутренним ротором. В двигателе 120 с внутренним ротором, представленном на фиг. 4В, на поверхности (на внешней периферической поверхности) ротора 2 расположен магнит 41, а напротив этого магнита 41 расположен статор 43, имеющий катушку 42. Далее, сенсор 32, представленный на фиг. 4А, выполнен таким образом, что устройство 3 расположено на боковой стороне ротора 2, а стационарный блок 4 расположен напротив устройства 3. Стационарный блок 4 расположен в статоре 43. Конструкция других частей, помимо расположенных вокруг сенсора 32, содержащего устройство 3 и стационарный блок 4, практически идентична двигателю 110 с внутренним ротором, изображенному на фиг. 3В.
Как описано выше, сенсор 32 пригоден для случая, когда между статором 43 и ротором 2 двигателя 120 действует сила, катушка 42 статора 43 расположена справа снаружи ротора 2, а двигатель имеет зазор на боковой стороне ротора 2, в котором может быть размещен сенсор 32. Таким образом обеспечена легкость установки сенсора.
Далее, фиг. 4С иллюстрирует пример установки при использовании сенсора 32, изображенного на фиг. 4А, в двигателе, имеющем конструкцию, отличную от конструкции двигателя 120, изображенного на фиг. 4В, что является примером модификации. В то время, как в двигателе с внутренним ротором, изображенным на фиг. 4В, ротор 2 расположен на внутренней стороне по отношению к статору 43, двигатель, представленный на фиг. 4С, является двигателем 130 с внешним ротором, в котором ротор 2 расположен на внешней стороне по отношению к статору 43. В двигателе 130 магнит 41 расположен в роторе 2, а статор 43, имеющий катушку 42, расположен напротив магнита 41. Сердечник статора 43 выполнен из многослойной пластины, содержащей стальные электромагнитные листы. Далее, сенсор 32, представленный на фиг. 4А, выполнен таким образом, что устройство 3 расположено на боковой стороне ротора 2, а стационарный блок 4 расположен напротив устройства 3. Блок 4 расположен в компоненте 43b, проходящем в направлении, вертикальном по отношению к вращательному валу, соединенному со статором 43 в части, не показанной на чертеже.
В сенсоре 33 для определения угла поворота, представленном на фиг. 5А, устройство 3 выполнено в радиальном направлении ротора 2 на внешней периферической поверхности, точнее, на внешней периферической поверхности кольцевой части 2d ротора 2, прикрепленного к валу 2а. Далее, блок 4 расположен снаружи напротив устройства 3.
Сенсор 33 имеет конструкцию, пригодную при установке сенсора, например, в синхронный двигатель с постоянным магнитом или бесщеточный двигатель с постоянным магнитом и с внешним ротором, имеющий зазор снаружи ротора 2. Такой сенсор для определения угла поворота относят к сенсорам радиального типа аналогично сенсору 31, изображенному на фиг. 3А. Так как сенсор 33 имеет конструкцию, представленную на фиг. 5А, необходимо только, чтобы устройство 3 был выполнено непосредственно на внешней периферической поверхности ротора 2, а блок 4 был установлен напротив устройства 3. Преимуществом такого сенсора является легкость его установки.
Фиг. 5В иллюстрирует использование сенсора для определения угла поворота, изображенного на фиг. 5А, в двигателе с внешним ротором. В двигателе 140 с внешним ротором, представленном на фиг. 5В, магнит 41 расположен в роторе 2, а статор 43, имеющий катушку 42, расположен напротив магнита 41. Сердечник статора 43 выполнен из многослойной пластины, содержащей стальные электромагнитные листы. Далее, сенсор 33, представленный на фиг. 5А, выполнен таким образом, что устройство 3 расположено на внешней периферической поверхности ротора 2, а блок 4 расположен напротив устройства 3. Блок 4 расположен в компоненте 43с, проходящем в направлении, параллельном вращательному валу, соединенному со статором 43. Конструкция других частей, помимо расположенных вокруг сенсора 33, содержащего устройство 3 и блок 4, практически идентичны двигателю 130, изображенному на фиг. 4С.
Как описано выше, двигатель имеет пространство снаружи ротора 2, и необходимо только, чтобы устройство 3 было выполнено непосредственно на внешней периферической поверхности ротора 2, а блок 4 был установлен напротив устройства 3. Таким образом, установка сенсора 33 достаточна легка.
Конструкция всех вариантов выполнения сенсоров для определения угла поворота, описанных выше, отличается тем, что нет необходимости в том, чтобы стационарный сенсорный блок охватывал вращательный вал. В частности, указанные сенсоры для определения угла поворота могут быть установлены без необходимости изменения стандартной конструкции ротора, вращательного вала, и т.п. При этом эти сенсоры для определения угла поворота весьма универсальны и могут быть установлены в устройствах с различными вращательными механизмами.
Необходимо отметить, что сенсор для определения угла поворота согласно настоящему изобретению не ограничен указанными выше примерами конструкций и применений, и в них могут быть внесены различные модификации и изменения без выхода за пределы объема и сущности настоящего изобретения.
Ниже каждая из конфигураций описанного выше сенсора для определения угла поворота описана подробно со ссылками на прилагаемые чертежи.
Фиг. 6 иллюстрирует пример конструкции блока 4, изображенного на фиг. 4, при этом фиг. 6А иллюстрирует вид спереди блока 4, расположенного напротив устройства 3, а фиг. 6В иллюстрирует вид сзади блока 4.
Согласно фиг. 6, блок 4 в этом варианте выполнения настоящего изобретения выполнен таким образом, что на передней поверхности печатной платы 51 сформированы четыре индуктивных компонента 52, а на ее задней поверхности расположены специализированная интегральная схема 54 арифметической обработки и область 55 для формирования периферической схемы, на которой формируют периферическую схему. Все указанные части покрыты внешним кожухом 53. Соответствующие части (индуктивный компонент, специализированная интегральная схема и печатная плата) далее будут совместно именоваться внутренним сенсором.
Для кожуха 53 используют немагнитный диэлектрический материал. Это связано с тем, что магнитный поток, вызванный электрическим током, текущим в каждом компоненте 52, должен проходить через устройство 3 и влиять на него как можно в большей степени, чтобы вырабатывание вихревого тока было более эффективным. В частности, предпочтительно, если в качестве кожуха 53 используют пластмассовый корпус, обладающий высокой прочностью и термостойкостью, принимая во внимание, что сенсор для определения угла поворота может быть использован в жестких условиях эксплуатации, например в автомобилях.
В случае, когда каждый компонент 52 расположен напротив устройства 3, компонент 52 может быть выполнен открытым и может быть защищен наполнителем и оболочкой. Кроме того, внутренний сенсор может быть впаян в кожух 53 с использованием процесса переформования. Возможны различные изменения в зависимости от условий эксплуатации и области применения сенсора для определения угла поворота.
Кроме того, индуктивные компоненты, специализированные интегральные схемы и прочие периферические схемы, выполняющие практические функции сенсора, выполнены и/или смонтированы на стандартной подложке электронной схемы, например полиамидной подложке, многослойной стеклянной подложке, ткани, эпоксидной смоле, используемой в качестве материала основы, и т.д. В частности, так как внутренний сенсор выполнен таким образом, что можно уменьшить его размеры и стабильно производить его с использованием стандартной технологии электронных схем и/или технологии монтажа и т.п., преимуществом внутреннего сенсора является снижение стоимости его производства.
В целом, необходимо достичь высокой точности как при размещении соответствующих индуктивных компонентов по отношению друг к другу, так и при размещении индуктивных компонентов по отношению к кодирующему устройству, чтобы сенсор для определения угла поворота, содержащий индуктивные компоненты, обладал хорошей точностью определения. Однако индуктивные компоненты выполнены интегрированными с использованием многослойной структуры печатной платы, в которой сформирован шаблоны катушек, как описано ниже в соответствии с сенсором для определения угла поворота по настоящему изобретению, и, следовательно, условие высокоточного размещения может быть легко выполнено при соблюдении только точного взаимного расположения кодирующего устройства и внутреннего сенсора или стационарного сенсорного блока.
Ниже подробно описана конфигурация каждого индуктивного компонента со ссылкой на фиг. 7. Несмотря на то что фиг. 7 иллюстрирует примеры конфигурации нескольких индуктивных компонентов, для удобства описания в качестве примера представлен один из четырех компонентов 52, изображенных на фиг. 6A. При этом фиг. 7A изображает шаблон 52A катушки на одной стороне, выполненный на поверхности печатной платы напротив устройства 3, а фиг. 7B изображает шаблон 52B катушки на другой стороне, расположенный на нижнем слое печатной платы, на которой выполнен шаблон 52A, изображенный на фиг. 7A. Далее, фиг. 7C изображает общий вид структуры, в которой наслоены на одной и другой стороне шаблоны 52A и 52B, представленные на фиг. 7A и фиг. 7B. На фиг. 7C внешний контур шаблона 52B на другой стороне, выполненный на нижнем слое, показан пунктиром.
Из фиг. 7А-7С видно, что каждый из индуктивных компонентов имеет многослойную структуру, в которой наслоены несколько печатных плат с выполненными на них шаблонами катушек.
В этом варианте выполнения компоненты 52 (52А, 52 В) имеют двухслойную структуру, при этом только необходимо установить число витков катушки, необходимых для возбуждения требуемого магнитного потока, путем регулирования числа наслоенных слоев шаблонов катушек.
В то же время, шаблоны 52A и 52B на одной и другой стороне, показанные на фиг. 7, являются взаимообратными, что, таким образом, обеспечивает преимущество, состоящее в том, что шаблоны 52A и 52B могут быть легко выполнены на печатной плате.
Кроме того, компонент 52 имеет плоскую структуру (плоскую форму) и расположен напротив плоскости устройства 3, как описано ниже. Таким образом, степень воздействия магнитного потока, возбужденного компонентом 52, на устройство 3 возрастает с обеспечением в результате эффективного вырабатывания вихревого тока, благодаря чему можно ожидать повышения точности определения.
Далее, компонент 52 согласно этому варианту выполнения содержит прямоугольный участок с воздушным сердечником и не использует магнитный сердечник, включенный в стандартный индуктивный компонент (катушку). Это обусловлено тем, что требуемая индуктивность может быть небольшой, так как сенсор для определения угла поворота согласно настоящему изобретению имеет сравнительно высокую рабочую частоту, составляющую от примерно 500 кГц до примерно 5 МГц. При этом, так как нет необходимости в тяжелом магнитном сердечнике, достигнуто значительное снижение массы сенсора для определения угла поворота.
В качестве примера в данном варианте выполнения описаны индуктивные компоненты многослойной структуры, полученной с использованием печатных плат, однако очевидно, что, например, даже проволочная катушка может дать идентичный эффект в этом варианте выполнения, если она намотана на воздушный сердечник и является плоской, а несколько таких проволочных катушек могут быть точно размещены на печатной плате.
Фиг. 8 иллюстрирует положение, при котором компоненты 52 блока 4 расположены напротив устройства 3.
Соответствующие компоненты 52 расположены в точках, соответствующих разности фаз 90° периодического изменения ширины устройства 3. Тогда разность фаз всех четырех индуктивных компонентов составляет 90°×3=270°.
В то же время длина L участка с воздушным сердечником каждого компонента 52 больше, чем максимальная ширина Wmax устройства 3. Благодаря тому, что компоненты 52 имеют такие размеры, возможно повысить вырабатывание вихревого тока, вырабатываемого в устройстве 3 при вырабатывании магнитных потоков компонентами 52, и в результате можно ожидать повышения точности определения.
Далее описана еще одна причина установления таких размеров участка с воздушным сердечником. В случае если участок с воздушным сердечником компонента 52 имеет форму квадрата или круга, где размеры в длину и ширину равны, область устройства 3, вырабатывающая вихревой ток и расположенная напротив конкретного компонента 52, является большей, чем необходимо, и возникает вероятность, что соседние компоненты 52 будут перекрываться с областями, вырабатывающими вихревой ток. Из-за этого возникает вероятность снижения точности определения и увеличения погрешности при измерении и/или определении.
Из-за описанных выше причин желательно, чтобы было выполнено следующее условие (условие 1) формирования участка с воздушным сердечником компонента 52 и устройства 3. Другими словами при выполнении этого условия может быть использована не только прямоугольная, но также овальная и т.п. форма участка с воздушным сердечником индуктивного компонента.
Условие 1
Длина участка с воздушным сердечником индуктивного компонента > Ширина участка с воздушным сердечником индуктивного компонента. Длина участка с воздушным сердечником индуктивного компонента > Максимальная ширина кодирующего устройства.
Например, значение W может быть определено на основе диаметра сквозного отверстия, которое может быть использовано для проведения соединительных проводов на другой слой печатной платы.
Таким образом, для данной печатной платы типичные значения могут составлять: W=1,28 мм, диапазон значений W=0~2 мм. Однако могут быть использованы и другие подходящие значения.
Посредством условия "Длина участка с воздушным сердечником индуктивного компонента > Максимальная ширина кодирующего устройства" можно регулировать или определять характеристики сенсора и его устойчивость к изменениям пределов допуска и биению кодирующего устройства.
Например, типичные значения могут составлять: L=11,3~14,5 мм при Wmax=11,0 мм, диапазон значений L=5,2~25 мм или больше при Wmax=5,0~20 мм или больше.
В некоторых вариантах выполнения в осевых конфигурациях сенсора может быть использована трапециевидная форма катушек.
Ниже описан еще один пример индуктивного компонента, подходящий для сенсора для определения угла поворота согласно настоящему изобретению. Фиг. 9 иллюстрируют пример еще одной формы индуктивного компонента.
Фиг. 9A изображает шаблон 52C катушки на одной стороне, выполненный на поверхности печатной платы напротив устройства 3 в качестве примера еще одной формы компонента 52, а фиг. 9B изображает шаблон 52D катушки на другой стороне, расположенный на нижнем слое печатной платы, на которой выполнен шаблон 52C, изображенный на фиг. 9A. Далее, фиг. 9C иллюстрирует общий вид структуры, в которой наслоены шаблоны 52C и 52D на одной стороне и на другой стороне, представленные на фиг. 9A и 9B. На фиг. 9C внешний контур шаблона 52D на другой стороне на нижнем слое показан пунктиром.
Как видно из фиг. 9A-9B, шаблоны 52С и 52D на одной и на другой стороне, формирующие компонент 52, выполнены таким образом, что они не перекрываются за исключением отдельных частей, в отличие от шаблонов 52A и 52B, представленных на фиг. 7.
Шаблоны 52A и 52B, изображенные на фиг. 7, имеют такую конфигурацию, что между шаблонами катушек верхнего слоя и нижнего слоя часто образуется паразитная емкость, то есть индуктивность L и паразитная емкость C образуют параллельную резонансную схему, если считать их электрически эквивалентной схемой. В то же время при увеличении емкости C резонансная частота компонента 52 переходит на более низкую частоту. Однако полное сопротивление Z на резонансной частоте становится максимальным в случае параллельной резонансной LC-схемы, и, таким образом, сопротивление становится высоким, когда подают напряжение с частотой от примерно 500 кГц до примерно 5 МГц для приведения в действие компонента 52. В результате возникает вероятность, что не будет получена напряженность магнитного поля, необходимая для выработки вихревого тока, с уменьшением точности определения.
С другой стороны, в конфигурации шаблонов 52С и 52D, представленных на фиг. 9, можно поддерживать резонансную частоту на высоком уровне, так как возможно снизить паразитную емкость С, возникающую между шаблонами 52С и 52D верхнего и нижнего слоев печатной платы при протекании электрического тока через компонент 52. Соответственно может быть увеличена напряженность магнитного поля, вырабатываемого магнитным потоком, возбуждаемым компонентом 52.
Ниже подробно описано кодирующее устройство в соответствии с этим вариантом выполнения со ссылкой на фиг. 10. Фиг. 10A иллюстрирует вид спереди устройства 3 радиального типа, используемого в сенсоре 31, изображенном на фиг. 5A, а фиг. 10B иллюстрирует вид спереди устройства 3 осевого типа, используемого в сенсоре 32, изображенном на фиг. 4A.
Каждое из устройств 3, представленных на фиг. 10A и 10B, является проводящим, вырабатывает вихревой ток при воздействии магнитного потока, возбужденного вышеописанным компонентом 52, и совершает вращательное движение вместе с вращательным телом, например ротором 2.
В качестве материала, подходящего для устройства 3, может быть использован проводящий металл, например, алюминий, сталь, медь или серебро. Необходимо только, чтобы выбранный материал подходил для условий эксплуатации сенсора для определения угла поворота. Например, алюминий, который не подвержен ржавчине, используют, если возможно использование сенсора при высокой влажности и есть риск повреждений, вызванных солевыми растворами.
Кроме того, устройство 3 имеет такую форму, что синусоидальные поверхности расположены симметрично, как показано на фиг. 10A, что означает, другими словами, что устройство 3 выполнено таким образом, что его ширина периодически увеличивается и уменьшается на конкретных участках, когда вращательное тело, например ротор 2, совершает вращательные движения.
С другой стороны, устройство 3, изображенное на фиг. 10B, выполнено таким образом, что его ширина периодически увеличивается и уменьшается, хотя его синусоидальные поверхности не расположены симметрично. Таким образом, такое устройство 3, изображенное на фиг. 10A или 10B, согласно настоящему изобретению, относится к типу с синусоидальной поверхностью. Необходимо отметить, что диапазонный эквивалент одной фазы периодических изменений устройства 3 показан на фиг. 10А и 10B соответственно.
Устройство 3 не ограничено синусоидальным типом и также может иметь форму ромба, как показано на фиг. 11A, треугольника, как показано на фиг. 11B, или эквивалентную им форму. Кроме того, в этом кодирующем устройстве ширина может изменяться не только непрерывно, как показано на этом чертеже, но и ступенчато, что на чертеже не показано.
Устройство 3 в варианте выполнения, представленном на фиг. 10B, имеет восемь областей увеличения или уменьшения ширины. Эти восемь областей для удобства описания далее называются восьмифазовой конфигурацией.
В настоящем изобретении такая фазовая конфигурация никак не влияет на практическую точность определения и может быть увеличена или уменьшена в зависимости от диаметра вращательного тела и производственных параметров.
Например, когда вращательное тело имеет большой диаметр, как, например, ротор электрического генератора электростанции, довольно сложно выполнить для такого вращательного тела однофазовое кодирующее устройство. Таким образом, необходимо изготовить несколько кодирующих устройств эквивалентных однофазовому, имеющих легкие для производства форму и размеры, и установить их на ротор.
С другой стороны, для вращательного тела небольшой ротационной машины сложно выполнить многофазовые кодирующие устройства. В этом случае необходимо выполнить по меньшей мере однофазовое кодирующее устройство.
Так как в кодирующем устройстве, описанном выше, использован проводящий материал, а само устройство имеет простую форму, его можно изготавливать различными способами, как описано ниже.
Типичным примером является обработка с нанесением маски, соответствующей форме кодирующего устройства, на вращательное тело с использованием нанесения гальванического покрытия, вакуумной металлизации, металлизации напылением и способа растрового оттиска. Описанная выше обработка подходит для массового производства и таким образом можно получить кодирующие устройства неизменного качества. В то же время при выполнении описанного выше способа растрового оттиска массу из перемешанных проводящего порошка, смолы, растворителя и т.п. оттискивают и/или высушивают или после тиснения и/или сушки выполняют обжиг.
Также в кодирующем устройстве может быть использован пластинчатый элемент и тонкий корпус, которому придана желаемая форма путем штамповки или вырезки. В этом случае кодирующее устройство можно легко установить при помощи оснастки для пайки, которую приводят в действие при расположении должным образом установочной колодки на вращательном теле. При этом кодирующее устройство может быть установлено без изменения конфигурации стандартного вращательного тела, что обеспечивает для устройства преимущество, состоящее в гибкости в применении.
Помимо того, если вращательное тело является проводимым, кодирующее устройство может быть выполнено в радиальном или осевом направлении своего вращательного тела, как показано на фиг. 12. В этом случае применимы процессы литья и/или резки и т.п.
Если кодирующее устройство устанавливают на вращательном теле с помощью вышеописанных способов, необходимо учитывать следующие условия.
Если вращательное тело является проводимым, например, проводимости вращательного тела и кодирующего устройства сравнимы, кодирующее устройство может быть выполнено непосредственно на вращательном теле при помощи вышеописанных нанесения гальванического покрытия, вакуумной металлизации, металлизации напылением, способа растрового оттиска и т.п., если проводимость кодирующего устройства выше, чем проводимость вращательного тела. Очевидно, что кодирующее устройство также может быть выполнено непосредственно на вращательном теле, если вращательное тело не является проводимым.
Кроме того, если устройство 3 и вращательное тело, например ротор 2, выполнены как единое целое, как показано на фиг. 12, необходимо, чтобы между устройством 3 и вращательным телом имелась разность 3а высот требуемой величины.
В качестве практического примера метода установления значения разности 3а можно использовать следующий. Глубину, на которую магнитный поток, возбужденный индуктивным компонентом, проникает во вращательное тело, предварительно измеряют при помощи моделирования, основанного на анализе магнитного поля на основе проводимости вращательного тела, структурных характеристик индуктивного компонента, характеристик приложенных тока и/или напряжения и т.д.
Таким образом, минимальное значение разности высот кодирующего устройства в такой конфигурации не обязательно ограничено конкретным значением, и нет необходимости задавать максимальное значение разности высот, если это максимальное значение определено в соответствии с ограничениями по размерам механизма, на котором установлен сенсор для определения угла поворота.
Ниже описан вариант выполнения конфигурации схемы сенсорного блока.
Рядом с сенсорными системами 5, включающими катушки L1, L2 и L3, L4, расположена схема 8, предназначенная для оценки или вычисления разностных сигналов. В проиллюстрированном варианте выполнения схема 8 сначала вырабатывает выходные сигналы 10.
Фиг. 13A схематически иллюстрирует работу одного из вариантов выполнения схемы 8, используемой в настоящем изобретении. В данном варианте выполнения схема 8 выполнена в виде специализированной интегральной схемы арифметической обработки, которая более подробно проиллюстрирована на фиг. 14 согласно одному из иллюстративных вариантов выполнения. Схема 8 вырабатывает аналоговое напряжение V (dphi) 10 на выходе 11 схемы из обозначенной dphi разности 9 фаз резонансных схем 6а, 6b первой и второй сенсорных систем 5а, 5b. Как показано на фиг. 2 и 13A, напряжение 10 на выходе 11 включает синусоидальный сигнал "sin" и косинусоидальный сигнал "cos".
На фиг. 13В разностные сигналы 9 систем 5а, 5b, обозначенные как dUss, в первом блоке 8а преобразуют в соответствующие сигналы разности амплитуд, а затем подают их на второй блок 8b оценки, который может быть выполнен в виде микроконтроллера и т.п., для определения из них требуемой информации о положении.
Фиг. 13C иллюстрирует еще один вариант выполнения, в котором сигналы 9 получают в виде разности df частот, например, на основе расположения систем 5а, 5b, как показано на фиг. 1E. Сигналы 9 также можно подавать на схему 8, например микропроцессор и т.п. При использовании микропроцессора имеющиеся внутренние ресурсы, например аналого-цифровой преобразователь, могут быть использованы для обработки сигналов 9. Также могут быть использованы другие специализированные компоненты, которые могут быть включены, в зависимости от применения, по меньшей мере в одну интегральную схему.
Фиг. 14 изображает функциональную схему схемы 8 согласно одному из вариантов выполнения настоящего изобретения, соответствующую обработке сигнала, проиллюстрированной на фиг. 13A. Пунктирные области, изображенные на фиг. 14, обозначают внешние компоненты, не являющиеся частью схемы 8.
Как описано выше, соотношение фаз устройства 3, прикрепленного к ротору 2, и соответствующий знак фаз определяют с помощью систем 5а, 5b. Системы 5, представленные слева на фиг. 14 пунктиром, выдают сигналы 9 в проиллюстрированном варианте выполнения таким образом, что они соответствуют разности dphi фаз, получаемой схемой 8 на входе 14. Модули 15 усиливают и фильтруют полученные сигналы 9. Затем, после усиления и фильтрации, устройства 16 сравнения преобразуют аналоговые сигналы в цифровые путем сравнения входных напряжений с опорным напряжением Vref, вырабатывая при этом соответственно только высокий и низкий уровни. Если при этом получают нулевую амплитуду, сигнал далее не обрабатывают. Управляющая схема 17 может обеспечить управление внутренними компонентами схемы 8, например фильтрами 19 и т.п.
Выработанные цифровые сигналы далее обрабатывают логическими схемами 18 исключающее “ИЛИ”, которые вырабатывают прямоугольные сигналы, содержащие большую долю гармоник. Выходные сигналы схем 18 затем подают на низкочастотные фильтры 19. Выходные сигналы фильтров 19 подают на разделительные каскады 20, на которые с регулятора 21 напряжения также подают сигнал Vcc напряжения, составляющий 5 В ± 10%. На выходе 11 схемы каскады 20 выдают синусоидальный сигнал sin и косинусоидальный сигнал cos в виде аналогового напряжения 10.
Как показано на фиг. 14, сигналы dphi, выдаваемые системами 5, обрабатывают в двух симметричных каналах 12. Каждый из каналов включает усилитель и фильтр 15 для каждой из схем 6а, 6b, два устройства 16 для выходных сигналов усилителя и фильтра 15, схему 18 для объединения сигналов устройств 16, фильтр 19 для выходного сигнала схемы 18 и каскад 20 для выдачи сигналов аналогового напряжения, то есть синусоидальных и косинусоидальных сигналов 10.
Для обеспечения системы для точных измерений в сложных условиях внешней среды схема 8 обладает высокой температурной стабильностью, а чувствительность схемы 8 к электромагнитным помехам поддерживают на низком уровне. Кроме того, может быть предпочтительно представлять выходные напряжения 10, соответствующие положению фаз, в виде очень точных сигналов, принимая во внимание возможные изменения отклонения.
За схемой 8 расположен вычислительный модуль 13, выполненный с возможностью объединения синусоидального сигнала sin и косинусоидального сигнала cos напряжений 10 в арктангенциальный сигнал. Таким образом получают линейный выходной сигнал, из которого можно вывести непосредственно положение устройства 3 и, следовательно, ротора 2.
Фиг. 15 схематически иллюстрирует, как может быть получена оптимизированная амплитудная зависимость согласно настоящему изобретению. Фиг. 15 иллюстрирует чувствительность, например в форме амплитуды, в зависимости от рабочей частоты со схем 6a, 6b. Как видно из фиг. 15, чувствительность схем 6а, 6b достигает наивысшего значения при соответствующей резонансной частоте. Кривая В схематически иллюстрирует рост амплитуды в случае малого расстояния между устройством 3 и соответствующими сенсорными катушками. В этом случае сглаживающий эффект устройства 3 высок и приводит к резонансной частоте ωu сглаженной системы, отличающейся от несглаженной или слабосглаженной резонансной частоты ω0 (кривая А). При прохождении через устройство 3 возникает соответствующая разность амплитуд, которую можно эффективно оценить с помощью катушек благодаря обычно небольшому расстоянию от устройства 3. При увеличении расстояния, например из-за технологических допусков и т.п., средний сглаживающий эффект при прохождении через кодирующее устройства значительно меньше, и, таким образом, при заданной рабочей частоте при изменении сглаживающего эффекта из-за формы кодирующего устройства падает также и чувствительность. В этом случае потеря чувствительности разностного сигнала может быть в определенной степени компенсирована соответствующим повышением рабочей частоты ωВ, то есть расположением рабочей точки Р ближе к "средней" резонансной частоте сглаженной системы, имеющей в среднем меньшую степень сглаживания. Таким образом, можно получить тем не менее достаточно сильные разностные сигналы. Иными словами, даже при увеличении среднего расстояния, что приводит к уменьшению сглаживания при прохождении через кодирующее устройство, можно получить сравнительно интенсивный разностный сигнал путем поднятия рабочей точки Р, соответствующей рабочей частоте ωB.
При увеличении расстояния от устройства 3, вызванного, например, биением или нарушением баланса кольца 7 и приводящего к уменьшению сглаживания блока 4, чувствительность может быть повышена при соответствующем выборе рабочей точки Р ближе к средней резонансной частоте ω0, как показано стрелкой на фиг. 15 с увеличением таким образом выходного сигнала, так что угловое положение ротора 2 может быть определено с достаточной точностью. При этом изменение расстояния между устройством 3 и блоком 4 может, например, составлять около 2 мм, и, тем не менее, может быть получена достаточно высокая амплитуда. В то время как положение опоры ротора 2 и, следовательно, прикрепленного к нему устройства 3 можно изменять в радиальном направлении, также возможны изменения и в осевом направлении. Таким образом, возможен сдвиг устройства 3 от блока 4, так что соответствующее расположение их напротив друг друга перестает быть идеальным. В зависимости от условий осевые пределы допуска составляют несколько миллиметров. В этом случае конструкция катушек индуктивности L1, L2 может быть соответствующим образом адаптирована, чтобы компенсировать пределы допуска, например, 5 мм.
Системы 5 могут иметь любую подходящую конструкцию и могут, в зависимости от положения устройства 3, быть расположены в радиальном или осевом направлении по отношению к ротору 2. В зависимости от расположения устройства 3 и связанного с ним блока 4, опросы устройства 3 можно выполнять на внешней радиальной стороне, внутренней радиальной стороне, а также в осевом направлении.
В данном варианте выполнения настоящего изобретения системы 5 расположены в непосредственной близости друг от друга, например, на расстоянии в несколько миллиметров, во избежание нарушения баланса кольца 7 при помощи по существу идентичных изменений амплитуды разностных сигналов, например, синусоидального и косинусоидального напряжения.
В проиллюстрированном варианте выполнения системы 5 расположены на роторе ротационной электрической машины. В других вариантах выполнения устройство 3 и системы 5а и/или 5b могут быть расположены на любых объектах, перемещаемых по отношению друг к другу, которые, в общем, обозначены здесь как подвижная часть и статор, для определения положения и/или направления движения подвижной части. Например, можно определять положение и направление движения системы линейного привода. Кроме того, если направление движения определять не нужно или его можно определить при помощи других средств, подвижная часть может быть снабжена одной системой 5а или 5b. Таким образом, предложены эффективные средства измерения угла и/или расстояния, которые основаны на изменении индуктивности посредством потерь на вихревые токи в кодирующем устройстве и пр., и в которых может быть достигнута высокая устойчивость к помехам по сравнению с чисто магнитными системами.
Благодаря кодирующему устройству ротора, как описано в некоторых вариантах выполнения, можно бесконтактно и с высокой устойчивостью определять угловое положение частей, вращающихся по отношению друг к другу, в частности, угловое положение ротора электрической машины, благодаря чему можно высокоэффективно управлять электрическими машинами, например, машинами с возбуждением от постоянного магнита, асинхронными машинами и т.п. путем использования устойчивой и экономичной сенсорной системы.
Например, угловое положение от 0 до 360°, которое может быть получено на основе сигнала кодирующей системы, может по существу соответствовать периоду коммутации синусоидального тока синхронной машины, соответствующему количеству полюсных пар статора. Если, например, синхронная машина включает семь полюсных пар, период определения угла может укладываться семь раз в диапазоне от 0 до 360° за время одного механического поворота, что соответствует углу в 51,43°.
Предложенная система для определения положения подвижной части, в частности, углового положения ротора, а также связанный с ней способ, особенно предпочтительны при использовании их в стартере и/или генераторе автомобилей, где схема 8 подвержена воздействию жестких условий внешней среды, а индуктивный позиционный сенсор должен быть нечувствителен к высокому току двигателя, достигающему 1000 ампер. Кроме того, сенсорная система согласно настоящему изобретению может иметь преимущества при использовании в системах электроприводов транспортных средств, например, в поездах с гибридными приводами или полностью электрическими приводами, так как возможно осуществление электронной коммутации в синхронных двигателях с возбуждением от постоянного магнита или бесщеточных двигателях постоянного тока или управление асинхронными машинами.
Ниже описаны иллюстративные варианты выполнения со ссылками на фиг. 16A-O, а также на предыдущие чертежи.
Фиг. 16A схематически иллюстрирует осевое расположение блока 4 и устройства 3, которое выполнено на подходящем материале 7а основы, или может быть выполнено непосредственно на основном материале ротора 2, расположенного на оси 200. Основной материал ротора 2 следует понимать как материал, позволяющий осуществлять работу ротора 2. Например, основной материал может представлять собой материал, служащий опорой для компонентов, например магнитов и т.п.
Фиг. 16B иллюстрирует сечение вдоль линии Hc - Nc на фиг. 16A, где устройство 3 согласно данному варианту выполнения включает одну дорожку 300, проходящую с периодическими изменениями на протяжении полного механического оборота ротора.
Фиг. 16C схематически иллюстрирует радиальное расположение, при котором в одном из вариантов выполнения устройство 3 расположено в радиальном направлении между осью 200 и сенсорным блоком 4a, формируя таким образом внешнюю радиальную конфигурацию. Если информацию с устройства 3 считывают изнутри посредством блока 4b, получают соответствующую внутреннюю конфигурацию. С этой целью устройство 3 может быть выполнено на внутренней поверхности кольца или другого компонента ротора 2.
Фиг. 16D схематически иллюстрирует еще один вариант выполнения устройства 3, в котором для удобства дорожка 300 изображена линейной. Зависимую от положения проводимость устройства 3 формируют при помощи блоков проводящего материала, расположенных по направлению движения, т.е. в горизонтальном направлении на фиг. 16D, с различным боковым протяжением. Отдельные блоки могут быть соединены с получением ступенчатой функции, которая может представлять собой аппроксимацию требуемой функции, например синусоидальной функции. В этом случае отдельная область 3b отображает один период, в котором требуется точная информация о положении ротора 2 для управления механизмом 1. Оцифровка формы дорожки 300 в отдельных областях 3b может упростить соответствующий производственный процесс, а поперечные размеры отдельных блоков, т.е. размеры по направлению движения, могут быть отрегулированы в соответствии с требуемым разрешением в отдельных областях 3b.
Фиг. 16Е иллюстрирует аппроксимацию ступенчатой функции, аппроксимирующей в качестве примера треугольную форму.
Фиг. 16F иллюстрирует вариант выполнения устройства 3, в котором ширина дорожки 300 по существу постоянна, по меньшей мере в каждой области 3b, а модуляцию проводимости получают путем изменения доли площади проводящего материала по отношению к проводящему материалу. Например, на пластине проводящего материала путем травления, сверления и т.п. могут быть выполнены углубления или отверстия с различными плотностью и/или размерами. Таким образом, количество проводящего материала, участвующего в выработке вихревых токов вдоль направления движения, может быть эффективно отрегулировано, а такой узор может быть выполнен с использованием высокоточных производственных технологий. Кроме того, эта технология может быть применена для создания узора непосредственно на материале ротора 2 без использования дополнительного материала основы.
Фиг. 16G схематически иллюстрирует вариант выполнения устройства 3, в котором с одной дорожки 300 получают дополнительную информацию кроме информации о положении в отдельной области 3b, а указанная дополнительная информация позволяет идентифицировать по меньшей мере некоторые из областей 3b. В данном варианте выполнения обеспечивают намеренное отклонение, например, изменяют по меньшей мере в некоторых областях максимальное протяжение или максимальное количество проводящего материала. Этот тип дополнительного кодирования, который также можно рассматривать как амплитудную модуляцию выходных сигналов, можно также использовать в комбинации с другими вариантами выполнения устройства 3. В частности, с помощью варианта выполнения, показанного на фиг. 16G, можно получить изменение средней проводимости в отдельных областях путем соответствующего регулирования плотности и/или размеров соответствующих углублений или полостей.
Фиг. 16H схематически иллюстрирует вариант выполнения, в котором устройство 3 расположено в материале 7а основы или на нем. В данном случае материал 7а может быть проводящим материалом, например d, или диэлектриком. Даже при использовании проводящего материала основы, который также может быть основным материалом ротора 2, можно получить подходящее изменение проводимости в кодирующем устройстве. Например, дорожка 300 может быть выполнена из материала с повышенной проводимостью, например, из меди и т.п., так что в этом материале с повышенной проводимостью можно навести более сильные вихревые токи по сравнению с окружающим материалом с пониженной проводимостью. Аналогично, для получения требуемой модуляции проводимости может быть использован материал с пониженной проводимостью или диэлектрик. Видно, что материал дорожки 300 может иметь толщину примерно от 2 до 50 мкм в зависимости от своих характеристик. При использовании в дорожке 300 материала с высокой проводимостью может быть достаточно толщины D в несколько мкм, а проводник с пониженной проводимостью или диэлектрик предпочтительно могут иметь повышенную толщину D для образования увеличенного расстояния между материалом, расположенным под дорожкой 300, и блоком 4.
На фиг. 16I-L представлены другие варианты выполнения конструкции катушек 4а.
На фиг. 16I, катушка 4а имеет плоскую конфигурацию, а ее отдельные витки в форме проводящего материала или проводящих линий расположены по бокам в одной плоскости. На правой части чертежа изображена область, в которой расположен материал основы, например печатная плата, на котором в одной плоскости выполнены отдельные витки. В других примерах несколько витков могут быть расположены на различных слоях материала основы, такого как многослойная печатная плата.
Кроме того, материал основы может быть выполнен в виде гибкого материала 4с, благодаря чему плоские катушки могут быть выполнены с изгибом, что может быть предпочтительно при радиальном расположении, как показано на фиг. 16А и 16В.
Фиг. 16J иллюстрирует плоскую конфигурацию, в которой витки выполнены из проводящего материала по существу без использования материала основы. Для этого путем вырезания можно придать желаемую форму такому материалу, как лист меди, лист алюминия и т.п.
Фиг. 16K иллюстрирует вариант выполнения, в котором катушка 4a внедрена в материал 4d, что повышает надежность катушки даже в сложных условиях внешней среды. Для этого катушка 4а, включающая или не включающая материал 4b основы, может быть запрессована в подходящий материал для достижения требуемой стабильности. Во время прессования не обязательно полностью заделывать катушку в материал 4d, и поверхность проводников может оставаться непокрытой или покрытие катушки может быть небольшим, благодаря чему при толщине 4е материала 4d получают требуемый зазор по отношению к устройству 3.
Фиг. 16L иллюстрирует катушку 4a в виде катушки с обмоткой, в которой витки выполнены на материале 4f основы. Катушки 4а могут быть при необходимости расположены на материале 4d или в нем требуемым образом, как описано выше.
Фиг. 16М иллюстрирует вариант выполнения блока 4, содержащего четыре сенсорные катушки L1, …, L4, выполняющие функции, аналогичные описанным со ссылкой на фиг. 2. В этом случае две дорожки 300, 3b расположены с пространственным фазовым сдвигом 180° по отношению к отдельной рассматриваемой области. Таким образом, катушки L1, L2, которые определяют блок 5а, могут быть размещены в одинаковом положении по отношению к направлению движения. Это верно и для катушек L3, L4, которые определяют второй блок 5b. Кроме того, катушки L1, L3 пространственно смещены по отношению друг к другу на 90°, и катушки L2, L4 также пространственно смещены на 90°, благодаря чему могут быть получены выходные сигналы, как описано выше. Таким образом могут быть уменьшены поперечные размеры систем 5а, 5b.
Фиг. 16N иллюстрирует еще один вариант, в котором четыре дорожки 300, 3b, …, 3d считывают отдельными катушками L1, L4, а требуемый пространственный фазовый сдвиг реализован благодаря конструкции дорожек 300, …, 3d. Иными словами, если катушки L1 и L2, т.е. система 5а, считывают дорожки 300 и 3b, эти дорожки имеют фазовый сдвиг 180°. Это верно и для дорожек 3c и 3d. Кроме того, дорожки 3b и 3c имеют фазовый сдвиг 90°.
Проиллюстрированные варианты выполнения, в которых имеется несколько дорожек 300, …3d, представляют собой примеры, в которых по меньшей мере одна дорожка имеет отличную пространственную периодичность или которые вообще могут не иметь периодической конфигурации по сравнению с другими дорожками. Благодаря этому по меньшей мере одна дорожка 300, 3d может быть использована для оценки на основе худшего пространственного разрешения. Для этого указанную дорожку можно опрашивать подходящим сенсорным блоком, как описано выше для отдельных дорожек 300. Таким образом, например, может быть получено положение на протяжении полного механического оборота ротора 2, а высокое разрешение определено изменениями в пределах периода кодирующего устройства, например на 360° синусоидального изменения.
Фиг. 16О иллюстрирует еще один вариант выполнения, в котором блок 5 соединен со схемой 8 при помощи кабельного соединения, выполненного таким образом, что получают пониженную чувствительность к помехам при подаче соответствующих выходных сигналов блока 5 на схему 8. Например, по меньшей мере соединительные линии для передачи выходных сигналов могут быть экранированы или могут быть выполнены в виде витых пар. Благодаря кабельному соединению блок 5 может быть расположен в любом месте в механизме 1, не требуя конструкции схемы 8, устойчивой к условиям внешней среды в механизме 1. Например, вблизи блока 5 могут возникать умеренно высокие температуры, например 150°C или выше, что потребовало бы специальных мер для защиты схемы 8 и привело бы к повышению стоимости. Например, интегральные схемы, предназначенные для высоких температур, значительно дороже. При использовании кабельного соединения 8а может быть достигнуто эффективное термическое размыкание, или схема 8 может быть расположена вне соответствующих полей помех. Для этого сенсорный блок может быть выполнен из компонентов схемы, которые могут иметь малую температурную зависимость, т.е. сенсорный блок может не включать полупроводниковых компонентов, благодаря чему на определение положения могут по существу не влиять внешние факторы. В одном из вариантов выполнения сенсорный блок выполнен таким образом, как описано со ссылкой на фиг. 2, благодаря чему воздействие внешних факторов, влияющих на все компоненты одинаково, таких как температура, может быть эффективно снижено или компенсировано путем использования разности соответствующих выходных сигналов.
ОПИСАНИЕ НОМЕРОВ ПОЗИЦИЙ
1 - электродвигатель,
2 - ротор (подвижная часть),
2а - вал ротора,
3 - кодирующее устройство,
4 - сенсорный блок,
5, 5а, 5b - сенсорная система,
6а, 6b - резонансная схема,
7 - кольцо кодирующего устройства,
8 - схема,
9 - сенсорный сигнал,
10 - аналоговое напряжение,
11 - выход схемы,
13 - вычислительный модуль,
14 - вход схемы,
15 - усилитель и фильтр,
16 - устройство сравнения,
17 - управляющий блок,
18 - логическая схема исключающее “или”,
19 - низкочастотный фильтр,
20 - разделительный каскад,
21 - регулятор напряжения,
31, 32, 33 - сенсор для определения угла поворота,
41 - магнит,
43 - статор,
51 - печатная плата,
52 - индуктивный компонент,
53 - внешний кожух,
54 - специализированная интегральная схема,
55 - область для формирования периферической схемы,
110, 120 - двигатель с внутренним ротаром,
130, 140 - двигатель с внешним ротаром,
С-а, С-b - емкость,
cos - косинусоидальный сигнал,
L1, L2, L3, L4 - индуктивный компонент,
Р - рабочая точка,
А - амплитуда,
R-a, R-b - резистор,
sin - синусоидальный сигнал,
V - источник переменного напряжения,
ω0 - резонансная частота,
ωB - рабочая частота,
ωu - резонансная частота с сильным затуханием,
Os1, Os2 - осциллятор,
300, 3В, 3С, 3D - дорожка,
200 - ось,
8А - кабельное соединение,
4D - основной материал,
4Е - толщина катушек,
D - толщина проводника,
4А - катушка, обмотка,
4В - материал основы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТИВНЫЙ СЕНСОР | 2018 |
|
RU2735380C1 |
| РУЛЕВАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2729145C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И/ИЛИ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ИЗМЕРЕНИЯ | 2009 |
|
RU2497080C2 |
| СПОСОБ ПОЗИЦИОННОГО КОНТРОЛЯ ВРАЩАЮЩЕГОСЯ ЭЛЕМЕНТА, УДЕРЖИВАЕМОГО ПОСТОЯННЫМ МАГНИТНЫМ ПОЛЕМ | 2002 |
|
RU2277936C2 |
| БЕСПРОВОДНЫЙ ИНТЕРФЕЙС | 2008 |
|
RU2415500C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ИСПОЛЬЗУЕМЫЙ В НЕМ СЕНСОРНЫЙ БЛОК | 1995 |
|
RU2130618C1 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ВИБРИРУЮЩИХ ЭЛЕКТРОИЗДЕЛИЙ ЛИЧНОГО ПОЛЬЗОВАНИЯ, В ЧАСТНОСТИ ЭЛЕКТРОБРИТВ | 1999 |
|
RU2223852C2 |
| СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ТОКА ПОДШИПНИКА С ПРЕОБРАЗОВАТЕЛЕМ ЭНЕРГИИ | 2010 |
|
RU2526864C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ВОЗДЕЙСТВИЯ КОМБИНИРОВАННОГО МАГНИТНОГО ПОЛЯ НА КИНЕТИКУ БИОХИМИЧЕСКИХ ПРОЦЕССОВ В БИОЛОГИЧЕСКИХ СИСТЕМАХ, СОДЕРЖАЩИХ МАГНИТНЫЕ НАНОЧАСТИЦЫ | 2016 |
|
RU2673337C2 |
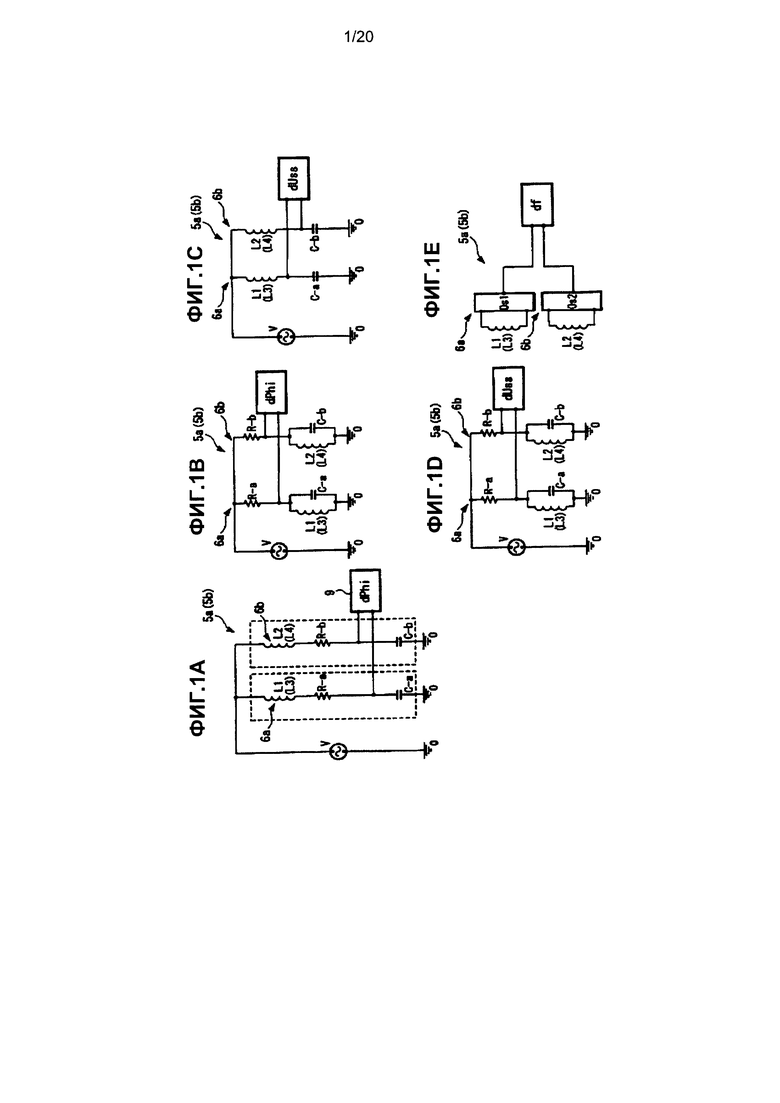
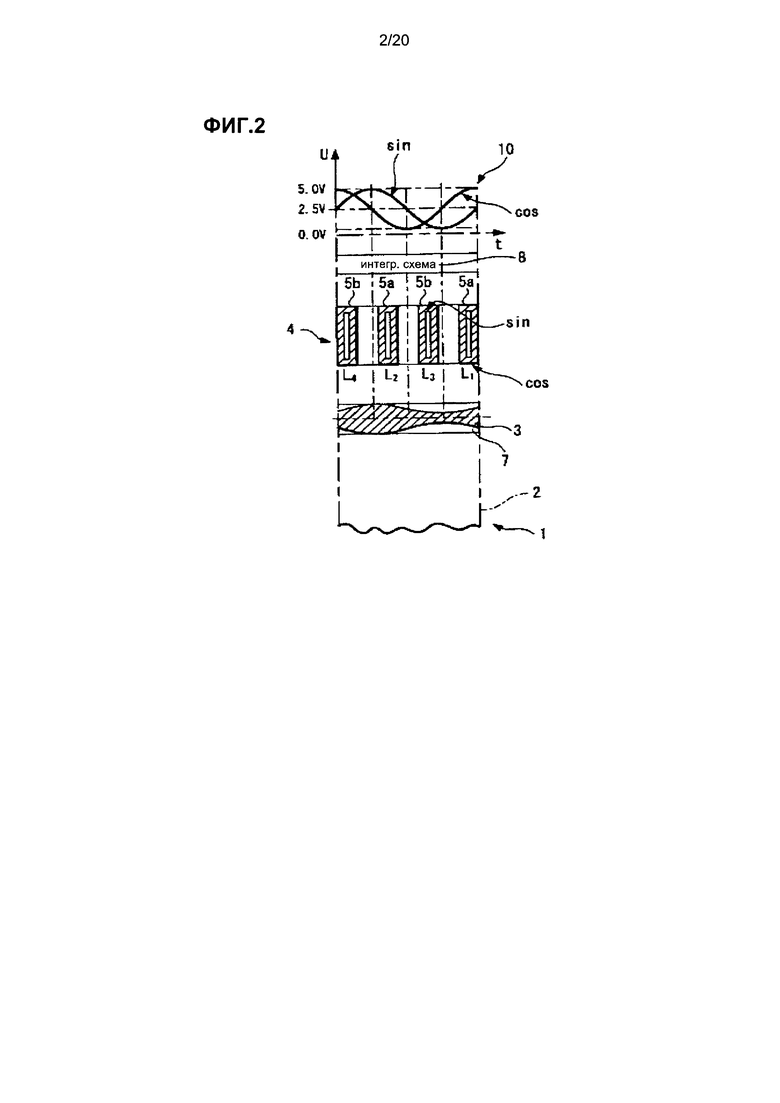
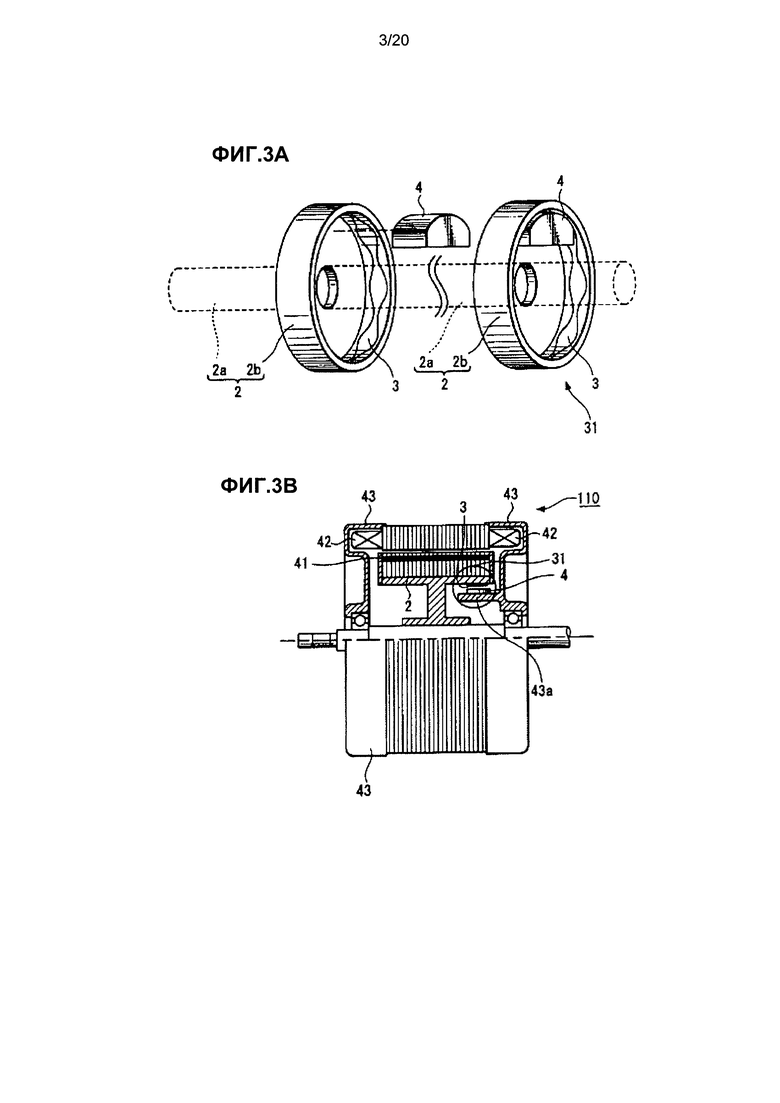
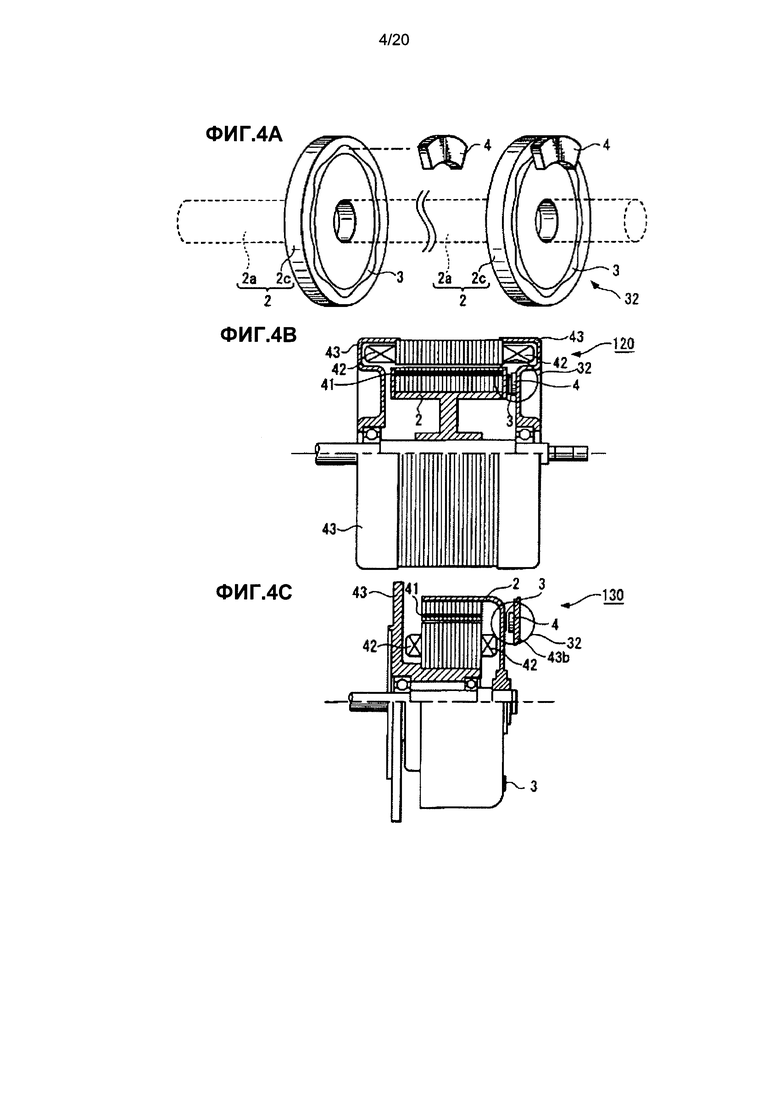
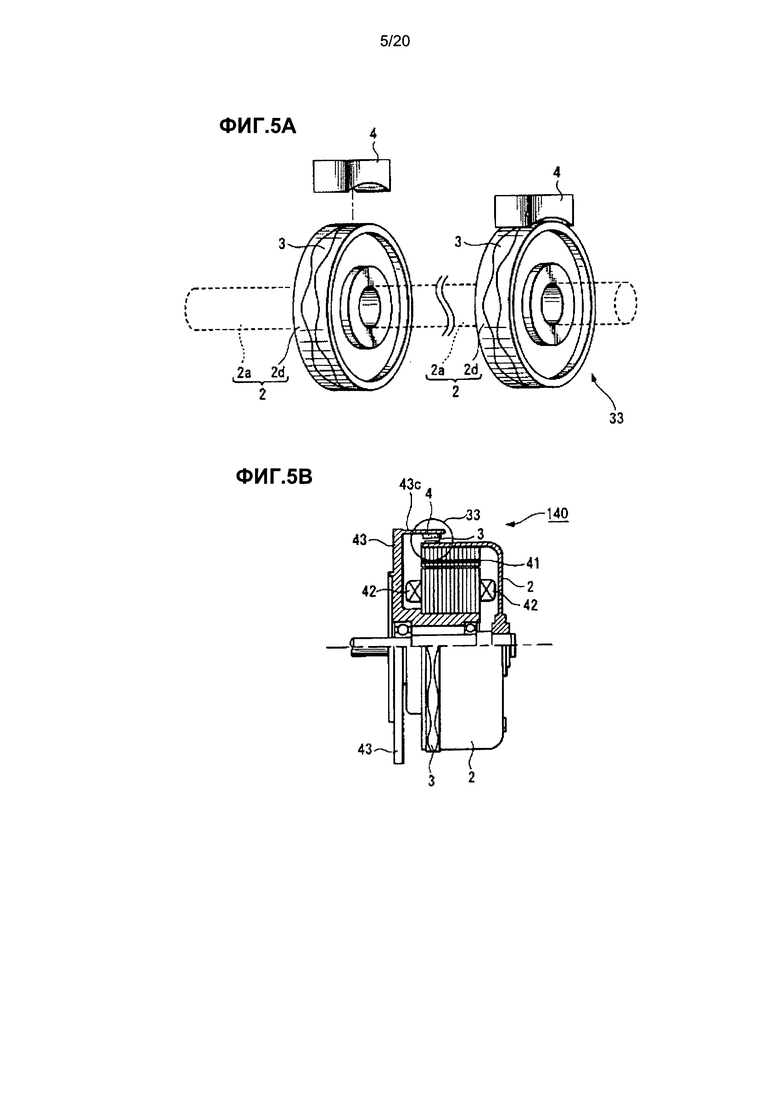
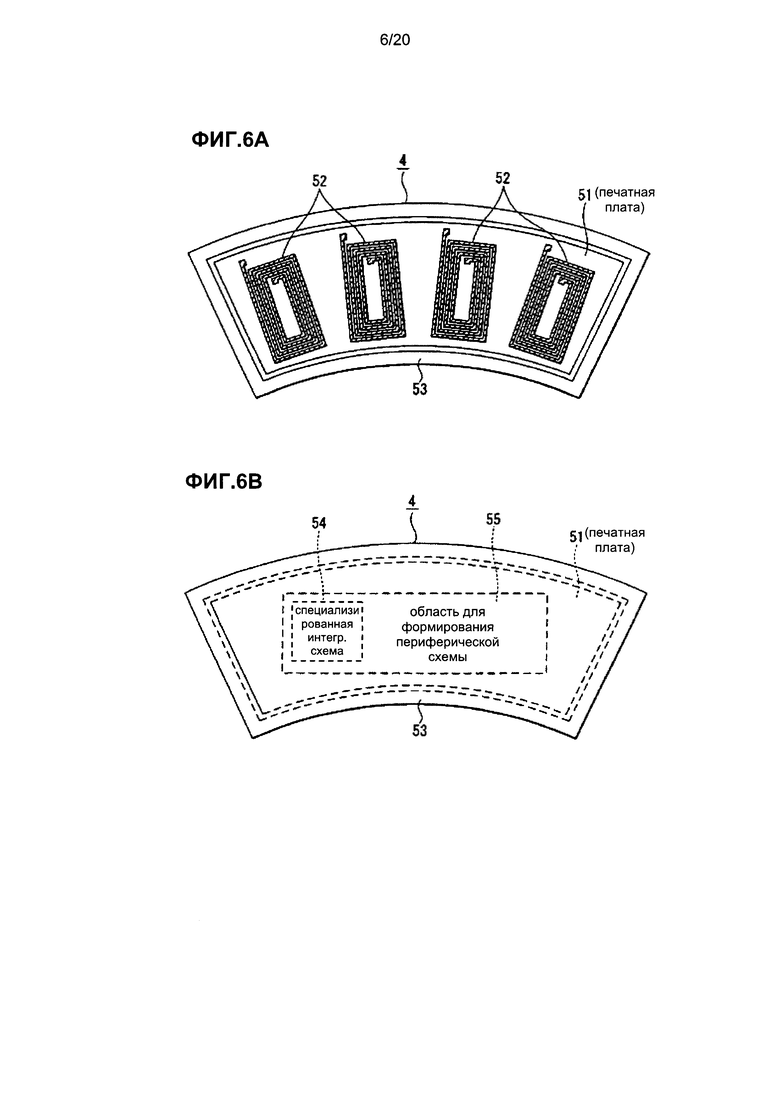
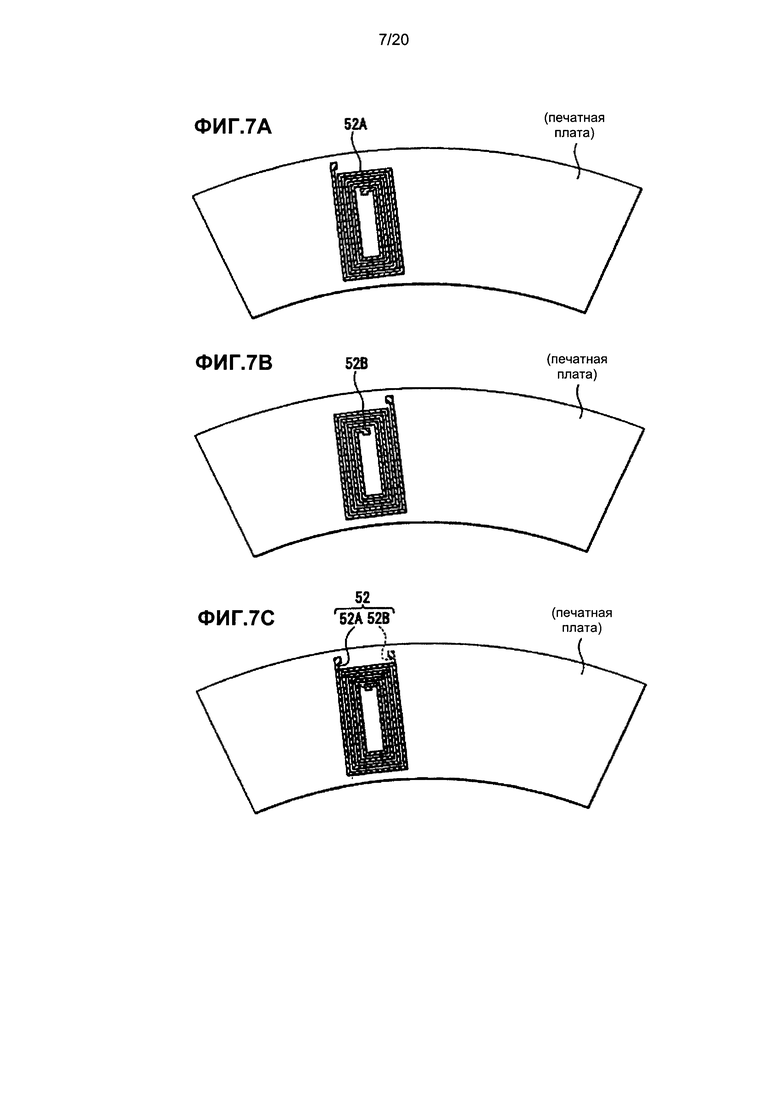
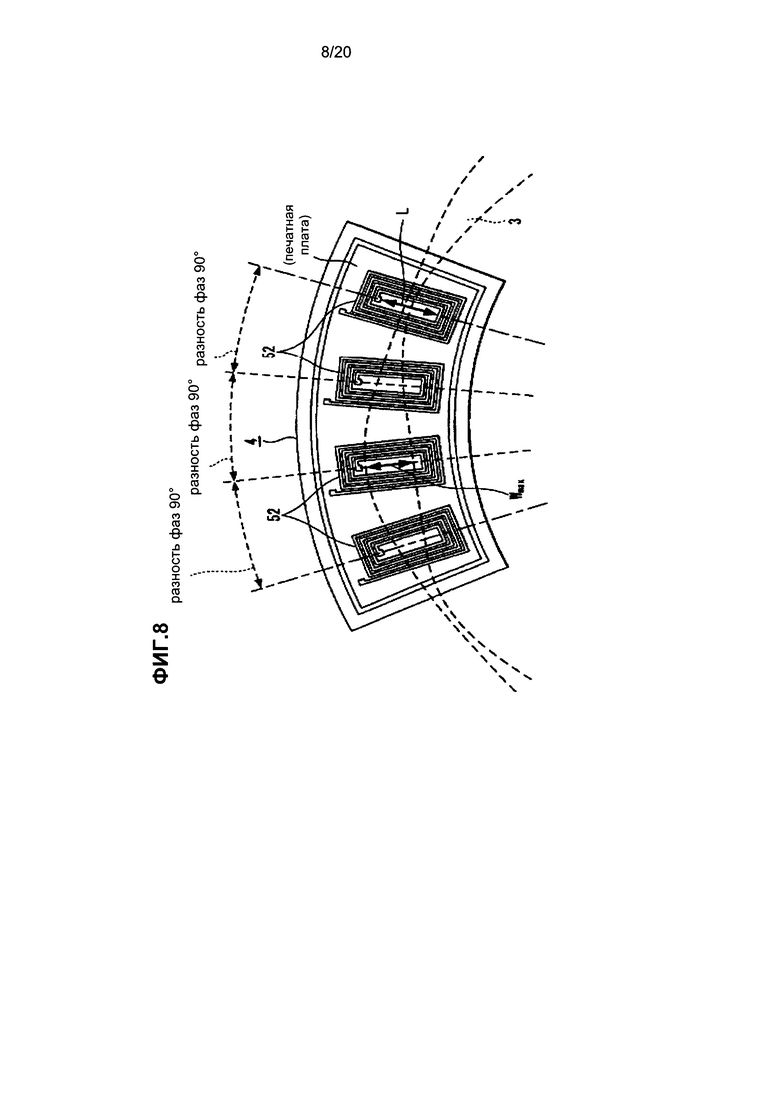
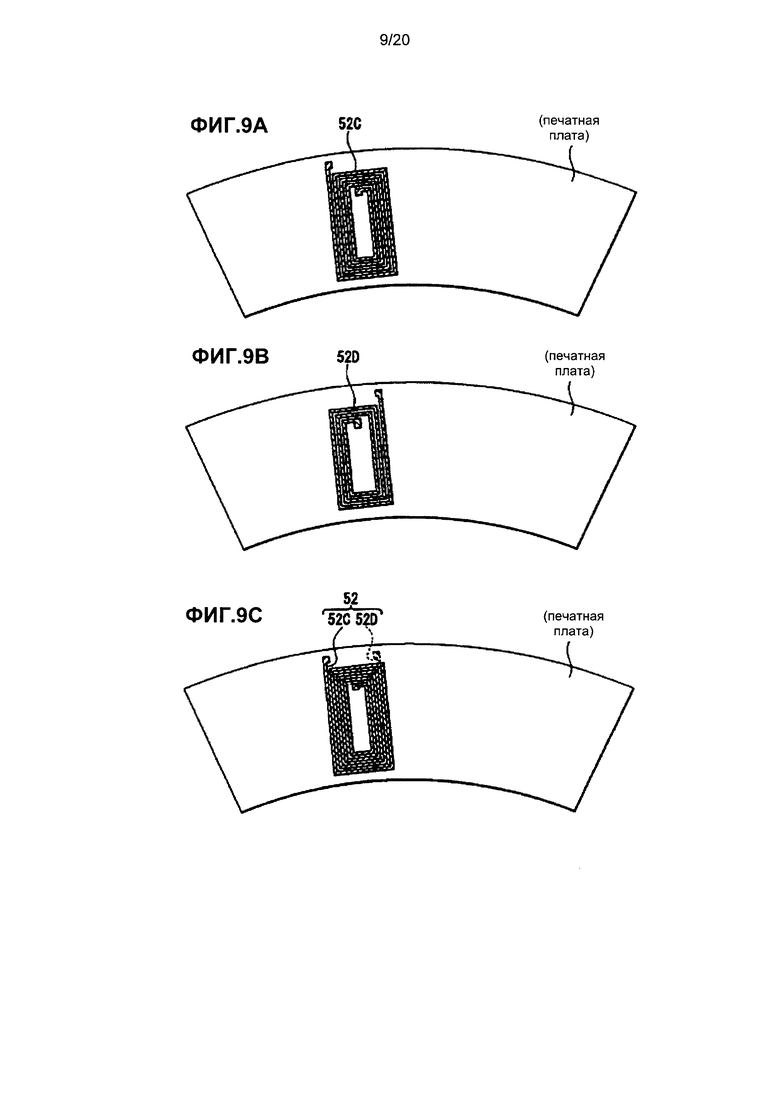
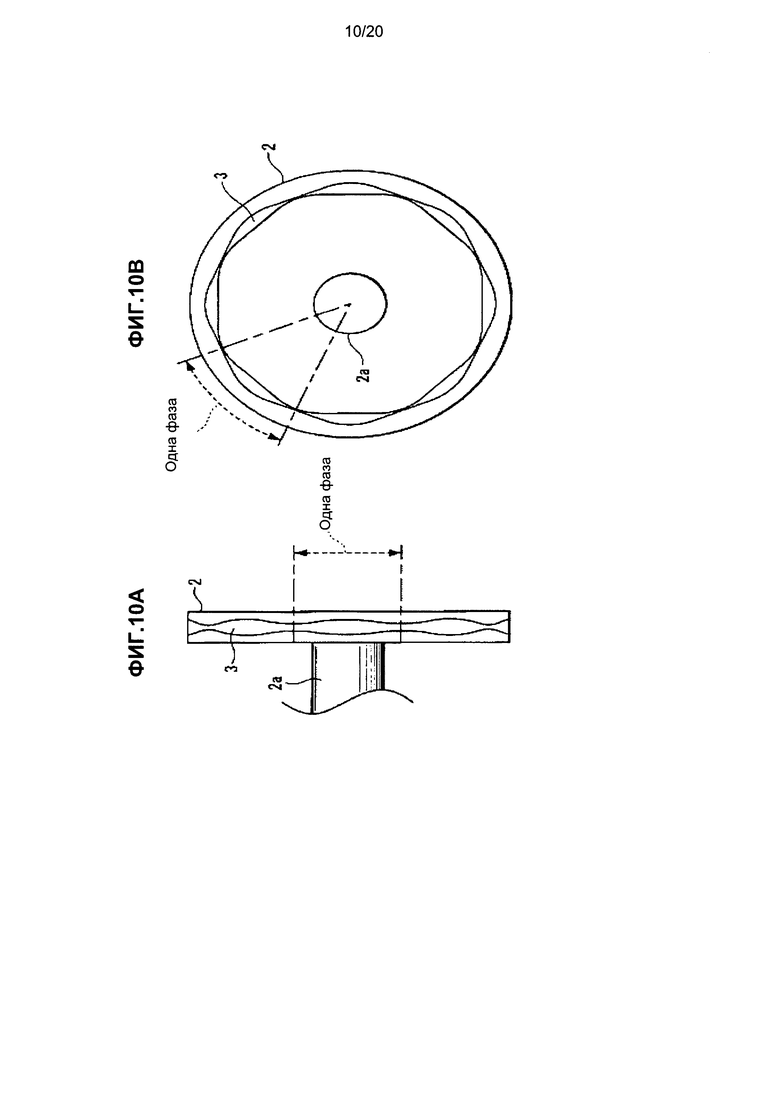
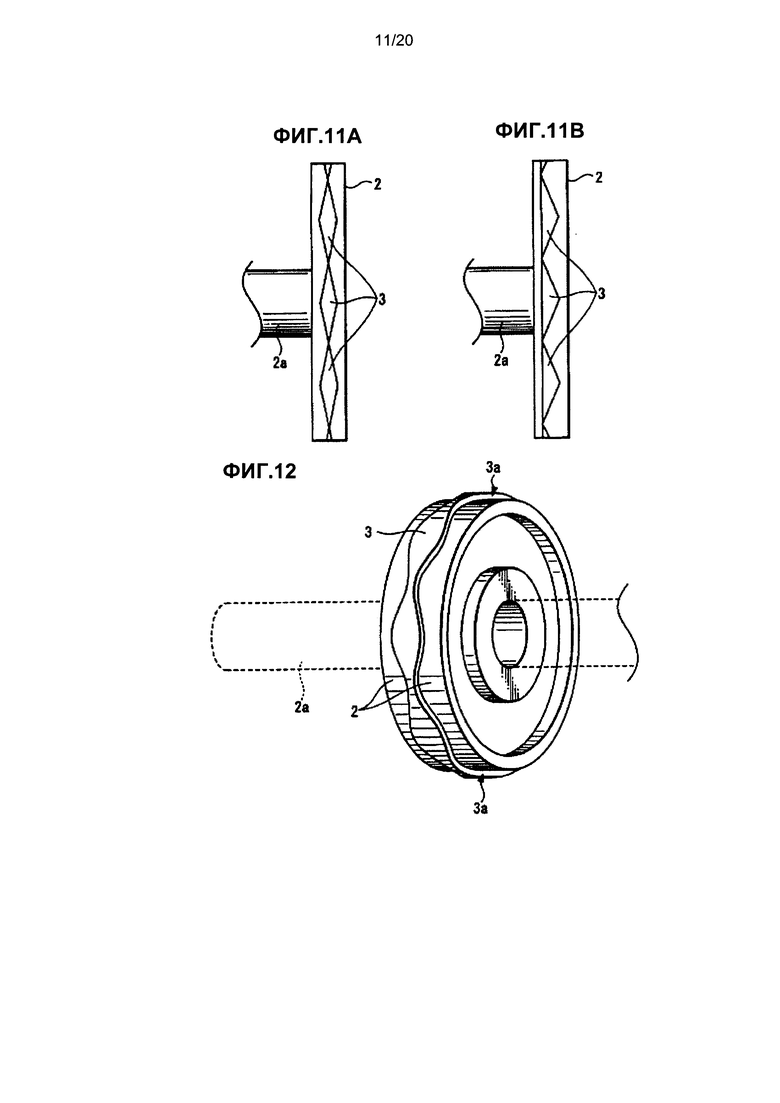
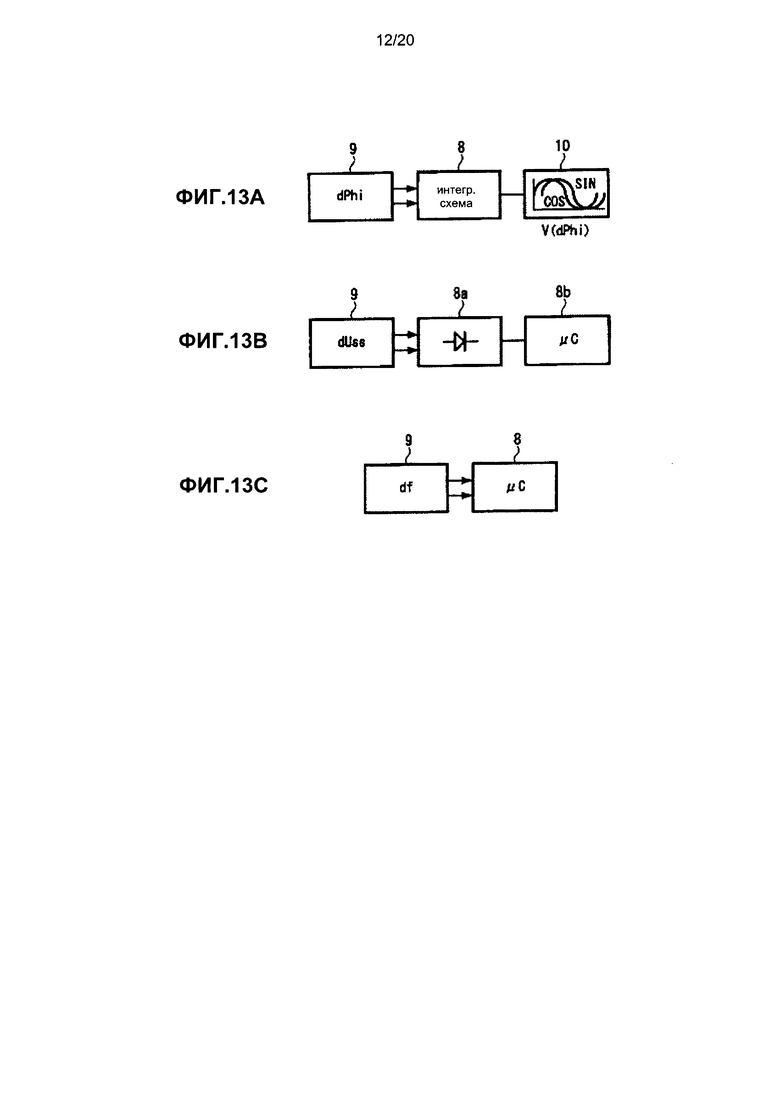
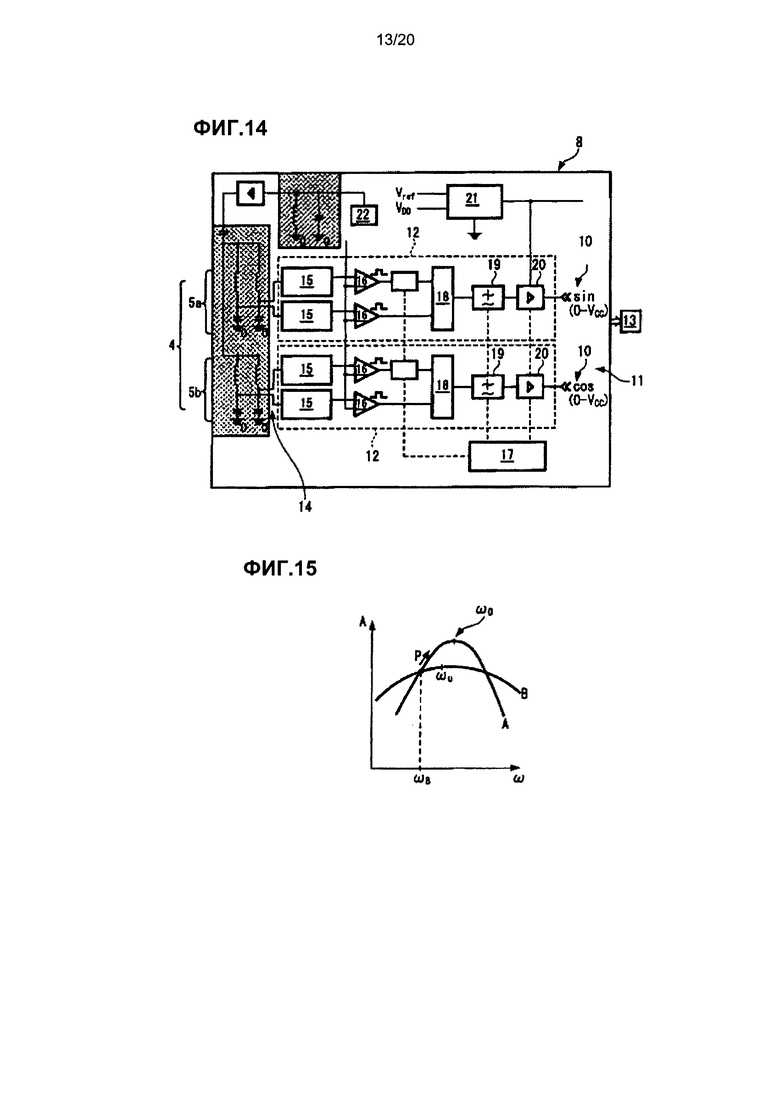

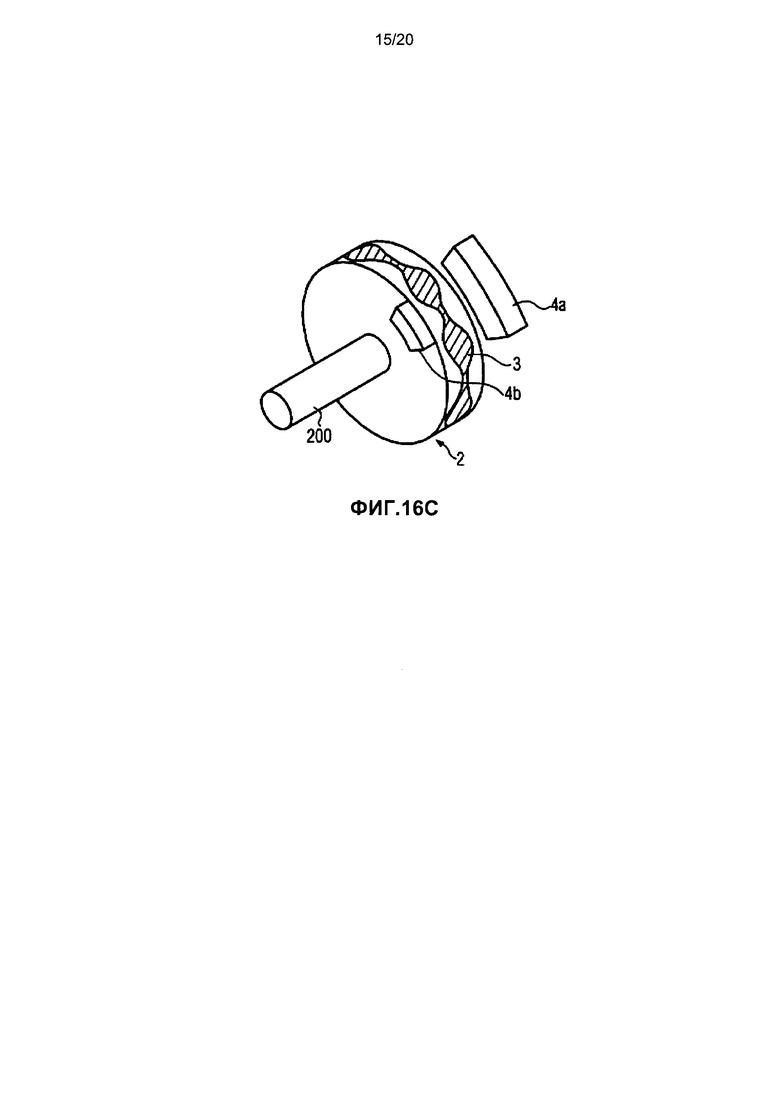
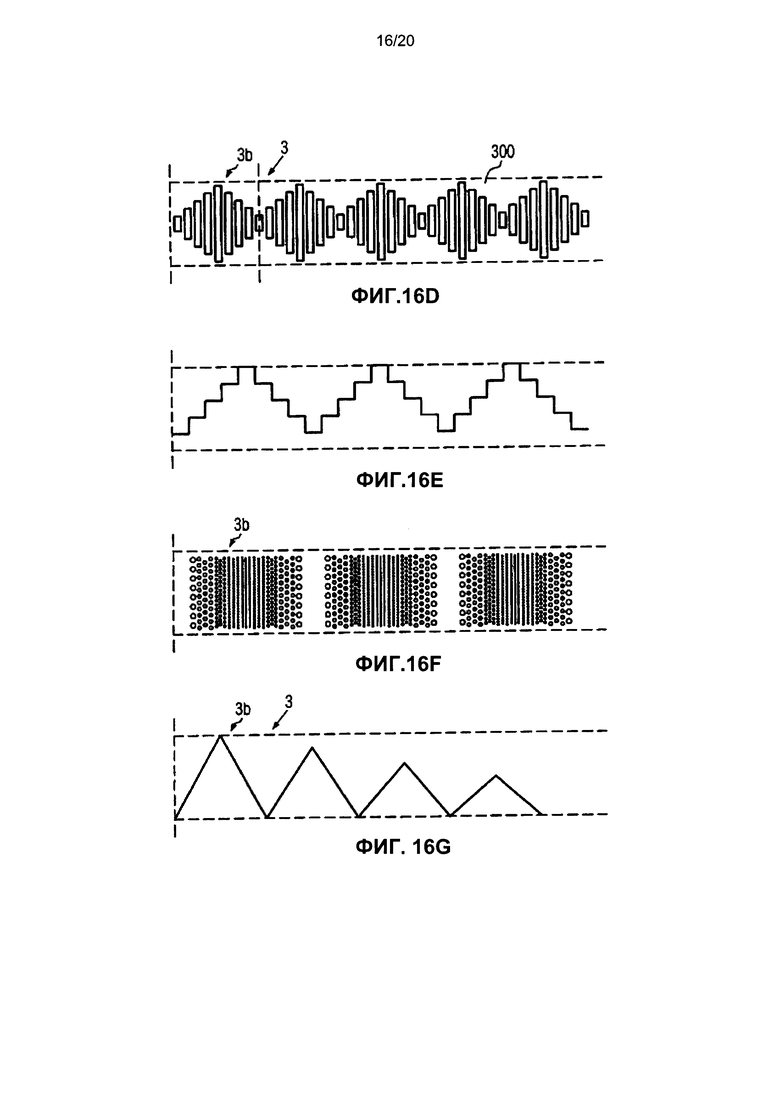
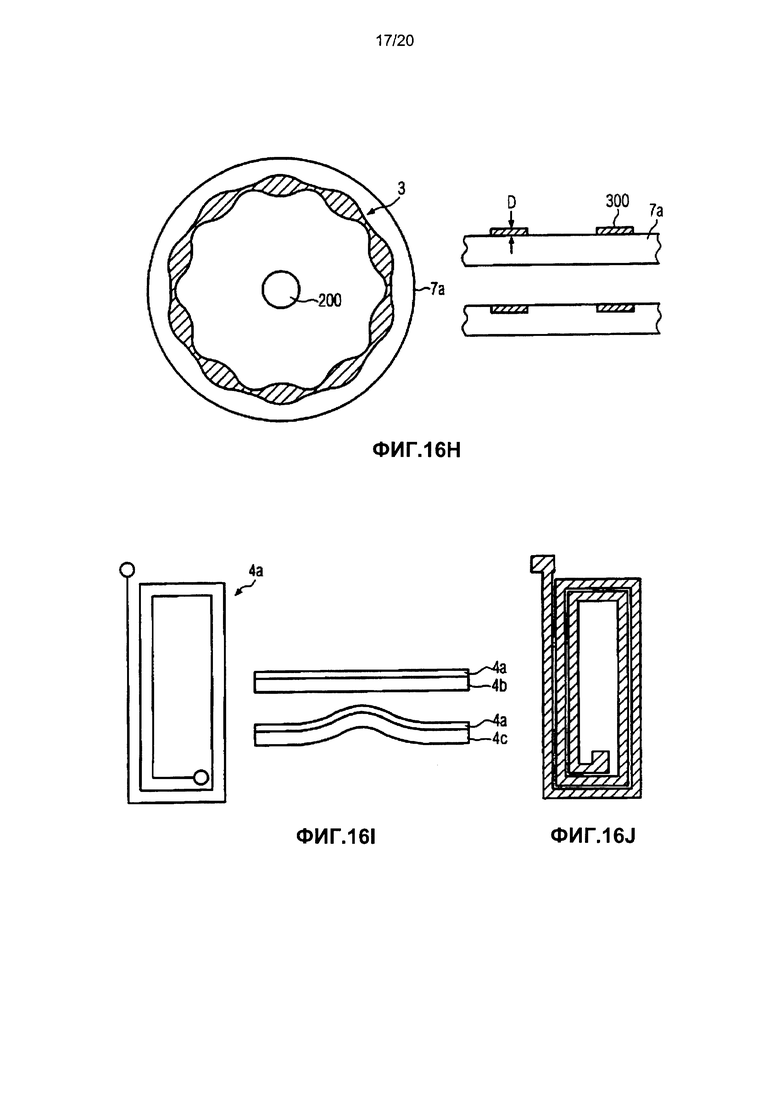
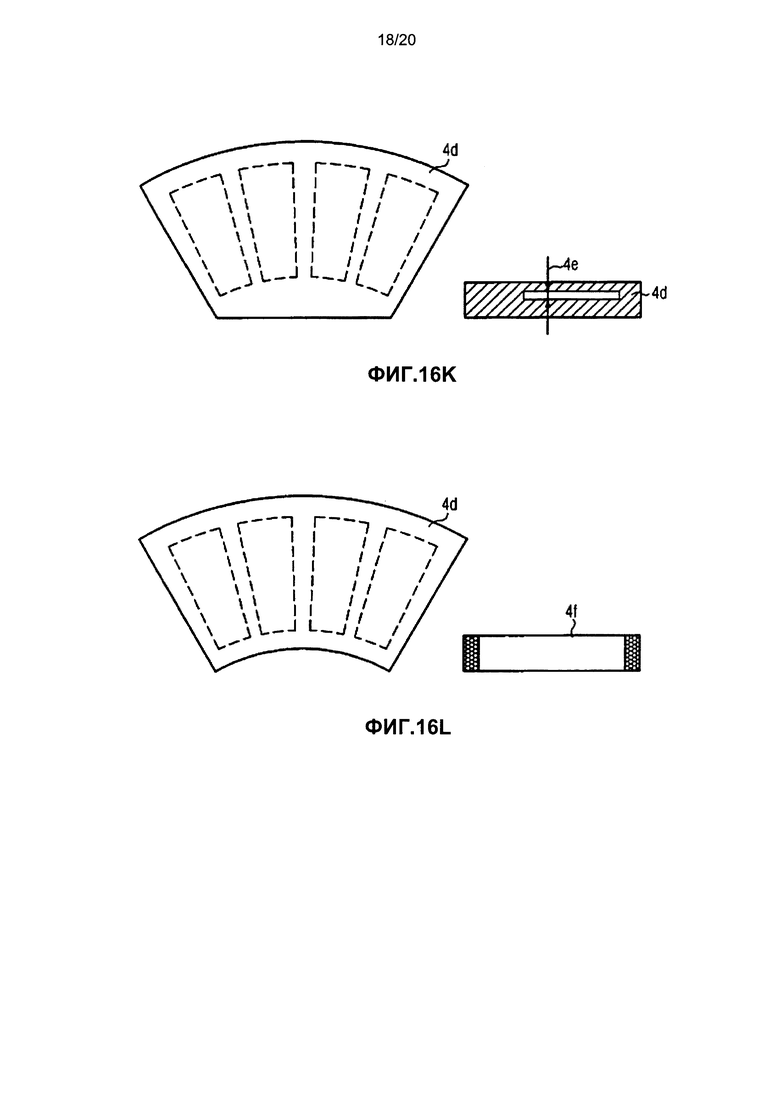
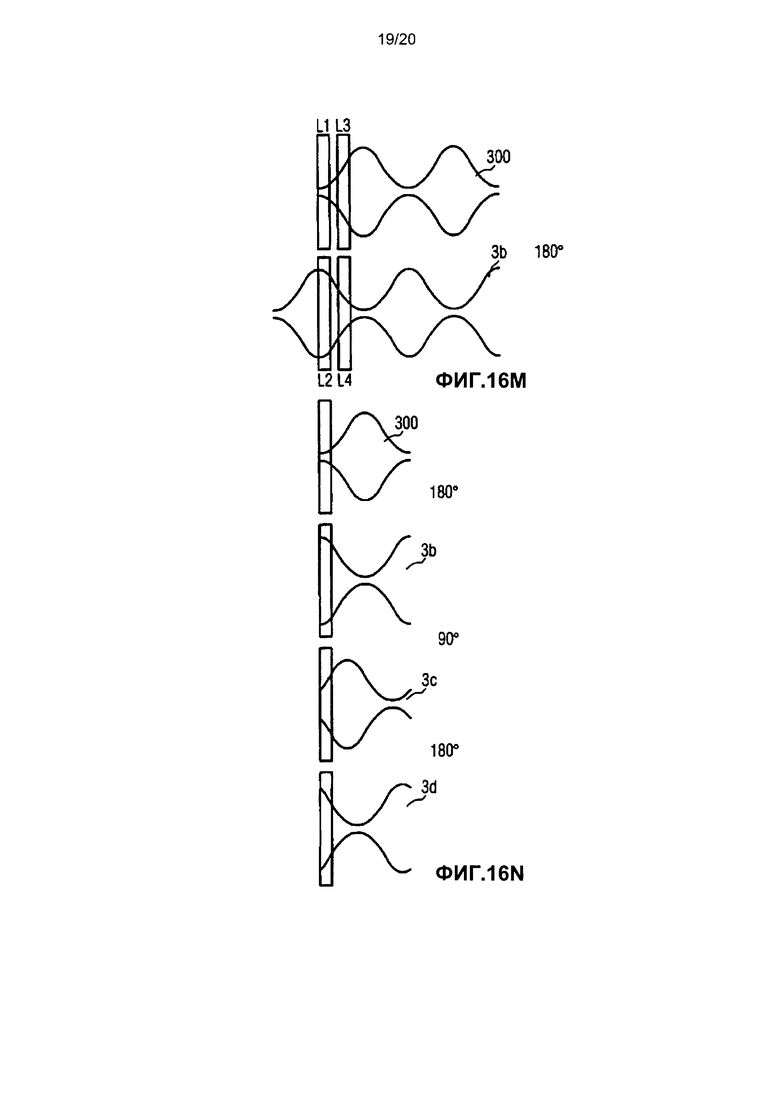
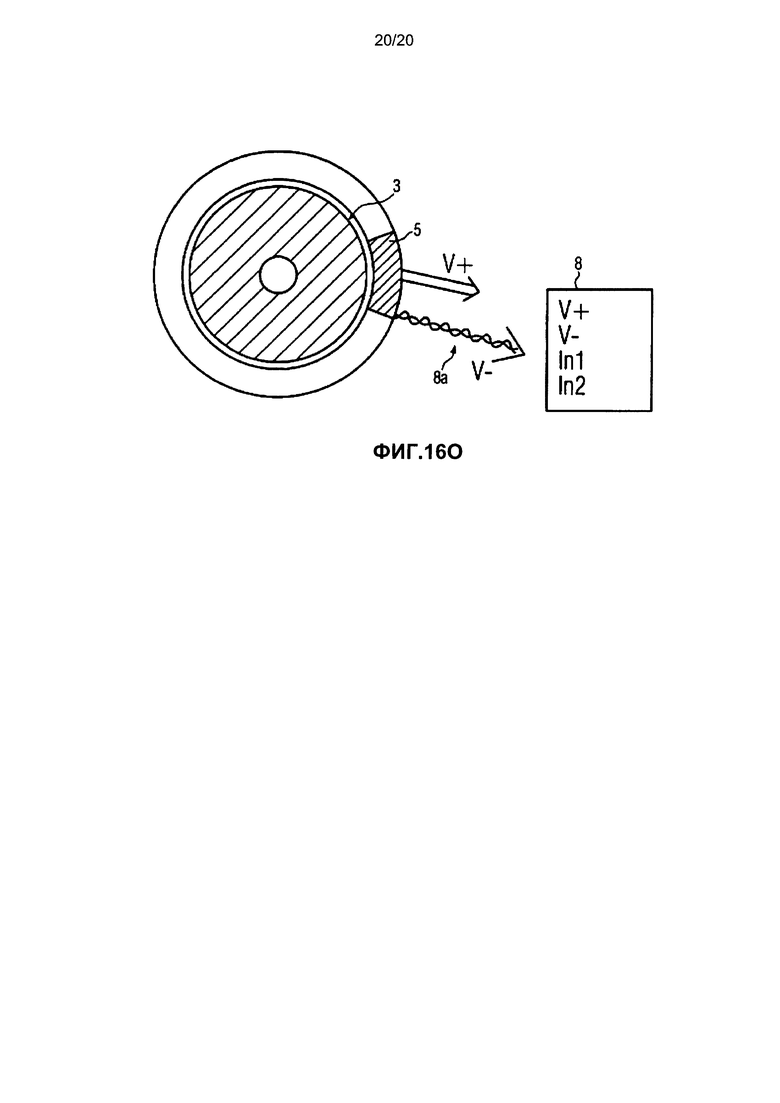
Изобретение относится к измерительной технике, а именно к системам для определения угла поворота вращательного тела. Технический результат: пониженная чувствительность к помехам в виде магнитных и электрических полей. Сущность: сенсорная система для определения угла поворота включает кодирующее устройство, прикрепленное к вращательному телу механизма и выполненное с возможностью перемещения с вращательным телом. Напротив кодирующего устройства расположен стационарный сенсорный блок, выдающий по меньшей мере один сенсорный сигнал для определения углового положения. Сенсорный блок включает первый индуктивный компонент, индуктивность которого зависит от углового положения кодирующего устройства. Индуктивный компонент выполнен плоской формы. Ширина свободной от сердечника части индуктивного компонента проходит вдоль направления движения кодирующего устройства, а длина этой свободной от сердечника части проходит перпендикулярно ее ширине. Причем указанная ширина меньше указанной длины, которая больше максимальной ширины кодирующей дорожки, расположенной на кодирующем устройстве. 2 н. и 28 з.п. ф-лы, 16 ил.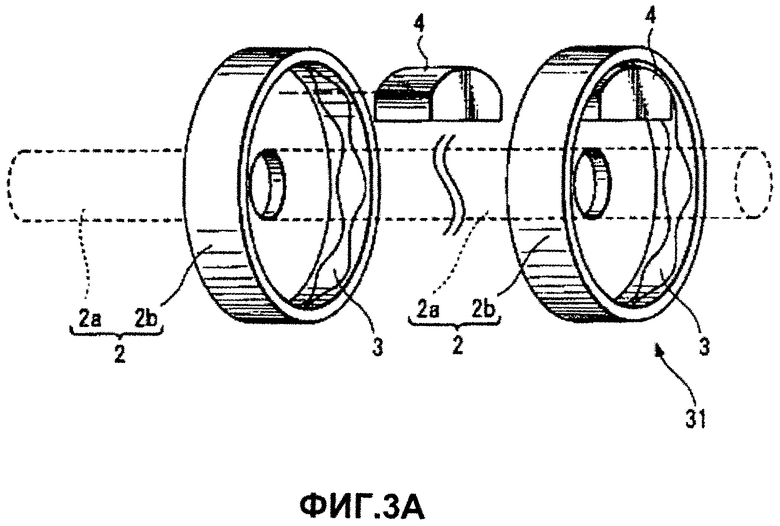
1. Система для определения положения ротора (2) механизма, включающая кодирующее устройство (3), прикрепленное к ротору (2) и выполненное с возможностью перемещения вместе с ним, и стационарный сенсорный блок (4), расположенный напротив кодирующего устройства (3) и выполненный с возможностью выдачи по меньшей мере одного сенсорного сигнала (9), на основании которого может быть определено указанное положение,
причем
сенсорный блок (4) включает первый индуктивный компонент, кодирующее устройство (3) выполнено с возможностью изменения индуктивности этого индуктивного компонента, которое зависит от перемещения,
при этом указанный первый индуктивный компонент выполнен плоской формы, ширина свободной от сердечника части указанного первого индуктивного компонента проходит вдоль направления движения кодирующего устройства, а длина этой свободной от сердечника части проходит перпендикулярно ее ширине, причем указанная ширина меньше указанной длины, которая больше максимальной ширины кодирующей дорожки, расположенной на кодирующем устройстве.
2. Система по п. 1, в которой кодирующее устройство включает электропроводящий материал.
3. Система по п. 1, в которой кодирующее устройство (3) включает структуру, периодически изменяющуюся в зависимости от углового положения.
4. Система по п. 3, в которой указанная изменяющаяся структура является синусоидальной, треугольной или частично прямоугольной.
5. Система по п. 1, в которой сенсорный блок (4) включает первую резонансную схему (6а, 6b), а указанный первый индуктивный компонент является частью этой схемы.
6. Система по п. 5, в которой сенсорный блок включает вторую резонансную схему (6а, 6b), содержащую второй индуктивный компонент, а первая и вторая резонансные схемы образуют первую сенсорную систему.
7. Система по п. 1, в которой первый индуктивный компонент использован в качестве части первого осциллятора.
8. Система по п. 7, которая содержит второй индуктивный компонент, используемый в качестве части второго осциллятора, а первый осциллятор и первый индуктивный компонент, а также второй осциллятор и второй индуктивный компонент образуют первую сенсорную систему (5).
9. Система по п. 6, в которой сенсорный блок (4) включает вторую сенсорную систему (5), смещенную по отношению к первой.
10. Система по п. 9, в которой первая и вторая сенсорные системы имеют идентичную конструкцию.
11. Система по п. 9, в которой первая и вторая сенсорные системы (5) расположены в непосредственной близости от сенсорного блока (4), так что кодирующее устройство воздействует на первую и вторую сенсорные системы по существу одинаково.
12. Система по п. 1, в которой за сенсорным блоком (4) расположена схема (8), преобразующая сенсорный сигнал (9) в сигнал на выходе (11) этой схемы, содержащий информацию об угловом положении.
13. Система по п. 12, в которой указанная схема (8) выполнена с возможностью получения сигнала, содержащего информацию об угловом положении, на основе разности фаз, и/или разности амплитуд, и/или разности частот сенсорного сигнала.
14. Система по п. 12, в которой указанная схема (8) включает симметричные каналы (12) для получения и обработки компонентов сенсорного сигнала (9) сенсорного блока (4).
15. Система по п. 6, в которой первый и второй индуктивные компоненты (L1, L2) первой и второй резонансных схем (6а, 6b) расположены таким образом, что они выдают выходные сигналы, имеющие фазовый сдвиг по отношению друг к другу.
16. Система по п. 1, которая включает источник (V) переменного напряжения с частотой (f) в диапазоне от примерно 500 кГц до примерно 5 МГц, соединенный по меньшей мере с первым индуктивным компонентом.
17. Система по п. 16, в которой сенсорный блок (4) включает первую резонансную схему (6а, 6b), частью которой является указанный первый индуктивный компонент, а также вторую резонансную схему (6а, 6b), содержащую второй индуктивный компонент, причем первая и вторая резонансные схемы образуют первую сенсорную систему, при этом первая и вторая резонансные схемы (6а, 6b) настроены на частоту (f) источника (V) переменного напряжения.
18. Система по п. 17, в которой первая и вторая резонансные схемы настроены на частоту источника переменного напряжения на основе расстояния между кодирующим устройством и сенсорным блоком.
19. Система по п. 5, в которой первая резонансная схема является последовательной.
20. Система по п. 5, в которой первая резонансная схема является параллельной.
21. Система по п. 12, в которой указанная схема (8) включает первый модуль, вырабатывающий синусоидальный сигнал (sin) и косинусоидальный сигнал (cos), и вычислительный модуль (13), вычисляющий арктангенциальную функцию на основе указанных синусоидального сигнала (sin) и косинусоидального сигнала (cos).
22. Сенсорная система для определения угла поворота, включающая
вращательное тело;
кодирующее устройство, прикрепленное к вращательному телу с возможностью вращения вместе с ним;
и стационарный сенсорный блок, содержащий по меньшей мере один индуктивный компонент и расположенный напротив кодирующего устройства с зазором по отношению к нему, причем указанный по меньшей мере один индуктивный компонент выполнен плоской формы, ширина свободной от сердечника части указанного по меньшей мере одного индуктивного компонента проходит вдоль направления движения кодирующего устройства, а длина этой свободной от сердечника части проходит перпендикулярно ее ширине, причем указанная ширина меньше указанной длины, которая больше максимальной ширины кодирующей дорожки, расположенной на кодирующем устройстве.
23. Система по п. 22, отличающаяся тем, что стационарный сенсорный блок работает на частоте от 500 кГц до 5 МГц.
24. Система по п. 22, отличающаяся тем, что стационарный сенсорный блок включает по меньшей мере указанный индуктивный компонент и интегральную схему для вычисления угла поворота путем арифметической обработки сигнала, выдаваемого индуктивным компонентом.
25. Система по п. 22, отличающаяся тем, что кодирующее устройство имеет на протяжении по меньшей мере одной фазы плоский участок, ширина которого периодически изменяется.
26. Система по п. 25, отличающаяся тем, что плоский участок кодирующего устройства расположен вертикально по отношению к радиальному направлению вращательного тела.
27. Система по п. 26, отличающаяся тем, что кодирующее устройство расположено на внешней периферической поверхности вращающегося тела.
28. Система по п. 26, отличающаяся тем, что кодирующее устройство расположено на внутренней периферической поверхности вращающегося тела.
29. Система по п. 25, отличающаяся тем, что плоский участок кодирующего устройства расположен вертикально по отношению к осевому направлению вращающегося тела.
30. Система по п. 22, отличающаяся тем, что стационарный сенсорный блок имеет четыре индуктивных компонента, выполненных в виде плоских катушек, причем соответствующие плоские катушки расположены таким образом, что их положения соответствуют разности фаз в 90° периодического изменения ширины кодирующего устройства.
| DE 102004033085 A1, 26.01.2006 | |||
| Устройство для наложения скобочного шва | 1987 |
|
SU1475612A1 |
| DE 3729230 A1, 16.03.1989 | |||
| US 5243187, 07.09.1993 | |||
| Индукционный датчик положения | 1985 |
|
SU1599645A1 |

