Изобретение относится к средствам механизации погрузоразгрузочных работ и может быть использовано для штабельного транспортирования изделий, например шин, коробок, брикетов а также штучных грузов, например мешков, ящиков, бочек и т.д.
Известны тележки для транспортирования ящиков (а/с 765077), содержащие штыри, закрепленные на поперечине П-образной рамы между ее параллельными сторонами, вертикальными направляющими рамами, жестко связанными с П-образной рамой, и кулачками, шарнирно закрепленными на ее параллельных сторонах, при этом кулачки выполнены с возможностью поворота в поперечных вертикальных плоскостях и фиксации в горизонтальном положении.
Недостатком данных тележек являются ее низкие функциональные возможности и высокая металлоемкость из-за больших распорных усилий.
Известны ручные тележки для транспортировки бочек, содержащие в верхней части тележки на ходовом винте установленный подпружиненный упор, а в нижней части тележки на ходовых винтах установлены захваты, при этом ходовые винты и рукоятка управления захватами кинематически взаимосвязаны (а.с. 1384457).
Недостатками данных тележек являются невысокая производительность, т.к. требуются значительные затраты времени для ручного вращения ходовых винтов для сведения и разведения захватов, а также высокая металлоемкость из-за больших изгибающих моментов, передаваемых захватами ходовым винтам.
Цель изобретения - повышение производительности, функциональных возможностей тележки и надежности удержания груза. Цель достигается тем, что на концах двух захватов, заводимых за центр тяжести груза, и на продольной оси рамы тележки размещены клинообразные зацепы, нижние поверхности которых находятся в одной плоскости, проходящей касательно образующей колес, и оси поворота захватов перпендикулярны этой плоскости, а захваты подпружинены и через распорные звенья кинематически взаимосвязаны с педалью.
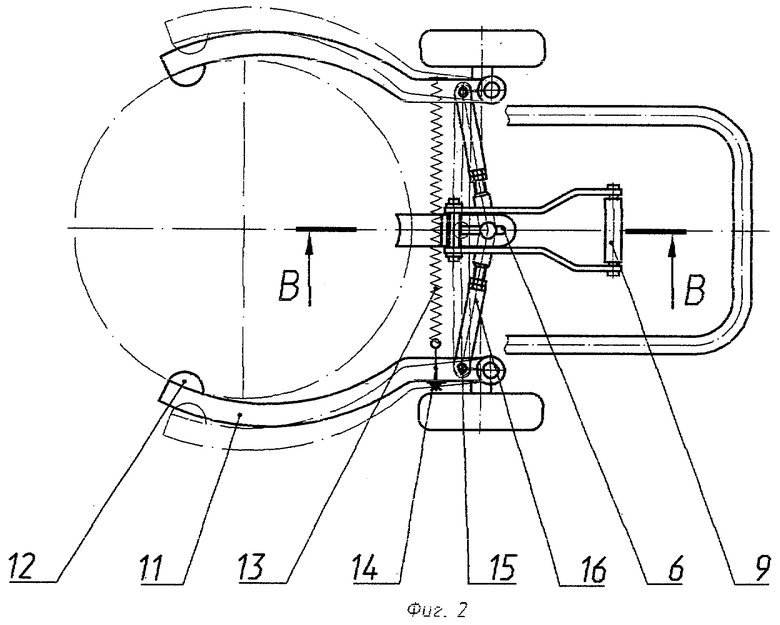
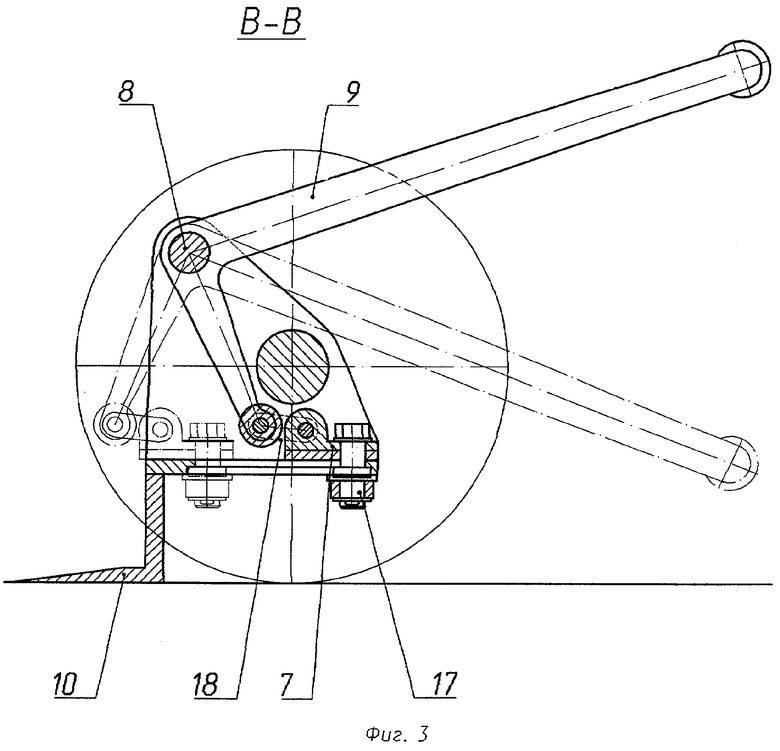
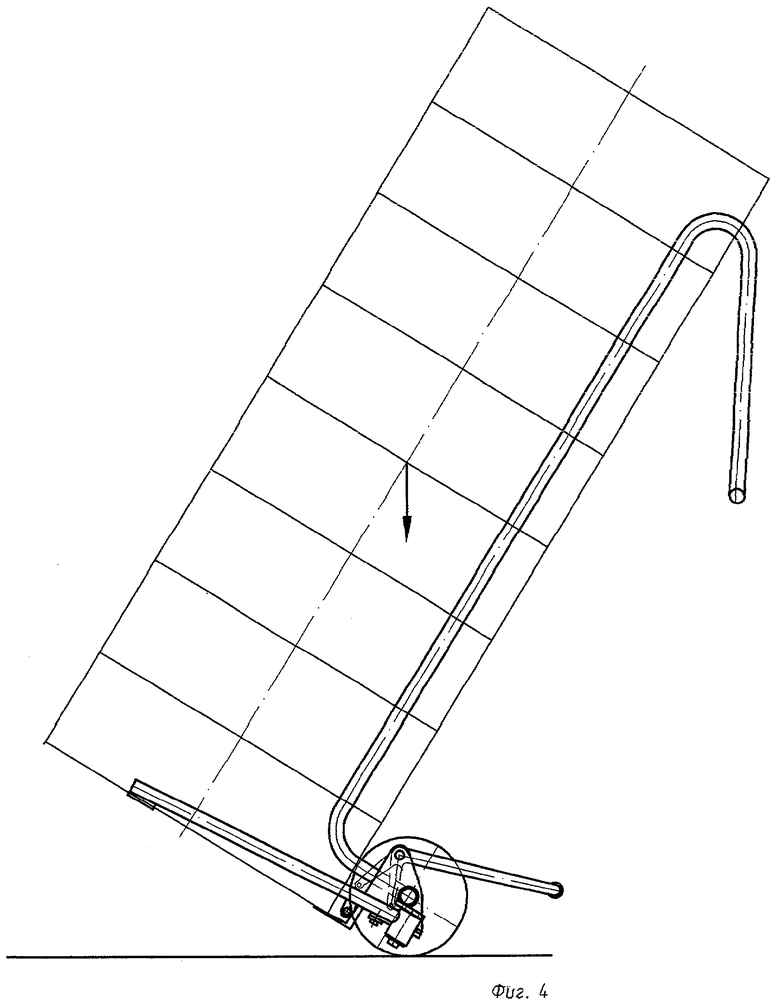
На фиг.1 изображено устройство, общий вид. На фиг.2 то же - вид сверху и разрез А-А зацепов. На фиг.3 - разрез В-В. На фиг.4 - положение тележки при транспортировке.
Ручная тележка содержит колесную пару поз.1, на оси поз.2, которой жестко закреплены: оси захватов поз.3, рукоятка тележки поз.4, выполненная из трубы и выдвинутая в сторону груза для его дополнительной опоры, кронштейн поз.5, размещенный на продольной оси тележки с пазом поз.6 для ползуна поз.7 и отверстием поз.8 для размещения оси педали поз.9 и клинообразный зацеп поз.10. На осях поз.3 размещены два захвата поз.11 с клинообразными зацепами на концах поз.12, причем нижние поверхности зацепов поз.10 и поз.12 находятся в одной плоскости, проходящей касательно образующей колес и перпендикулярно осям захватов. Захваты также оснащены проушинами для крепления пружины поз.13 с натяжителем поз.14 и шарнирами поз.15 для крепления распорных звеньев поз.16, которые другим концом, шарнирно, поз.17 соединены с ползуном поз.7.
Ползун поз.7 через шарнирное промежуточное звено поз.18 соединен с рычагом педали поз.9, причем при нажатом положении педали поз.9 ползун поз.7 доходит до упора паза поз.6 тогда, когда ось поз.17 распорных рычагов, размещенная на ползуне, пересечет линию, соединяющую между собой оси 15, соединения захватов с распорными рычагами, т.е. зафиксирует педаль в нижнем положении.
Порядок работы на тележке следующий.
Рабочий подводит тележку, например, к штабелю легковых шин. Установив тележку в вертикальном положении перед штабелем, рабочий нажимает ногой на педаль, в результате чего соединенные между собой пружиной поз.13 захваты поз.11 за счет перемещения распорных звеньев поз.16 разводятся. Рабочий заводит захваты тележки с двух сторон штабеля до упора клинообразного зацепа поз.10 под низ нижней шины, причем удерживая зацепы поз.12 на уровне поверхности пола. Затем носком ноги рабочий снизу приподнимает педаль поз.9, которая за счет жесткости пружины поз.13 возвращает педаль поз.19 в верхнее положение и одновременно сводит захваты 11, которые своими лезвиями клинообразных зацепов поз.12 внедряются под низ нижней шины. Опираясь одной ногой на ось поз.2 тележки и одновременно подавая рукоятку тележки поз.4 на себя, рабочий кантует штабель шин в транспортное положение, т.е. размещая центр тяжести штабеля шин над осью тележки. В таком положении штабель шин на колесах тележки легко транспортируется в нужное место. На месте, опираясь ногой на ось тележки и удерживая рукоятку поз.4, рабочий плавно устанавливает штабель на пол и затем, нажав на педаль до упора, разводит захваты и выкатывает на себя тележку.
Таким образом, тележка воздействует на груз не поверхностью, а линией, точнее лезвием клинообразных зацепов, что повышает удельное давление в месте контакта зацепа с грузом, а зацепы, размещаясь в одной плоскости, проходящей касательно образующей колес, воздействуют на груз в зоне контакта его с полом, внедряясь под груз, что повышает надежность его удержания. Благодаря тому, что груз сжимается пружиной, т.е. защелкивается, а не механически зажимается, - повышается производительность работы с тележкой, благодаря тому, что распорные звенья выполнены регулируемыми по длине, расширяются ее функциональные возможности, т.к. позволяют захватывать грузы по диаметру и ширине в широком диапазоне, а наличие натяжителя у пружины позволяет регулировкой осуществлять более щадящее воздействие на груз зацепами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручная тележка | 1984 |
|
SU1227542A1 |
| Ручная тележка для перевозки штабелей штучных грузов | 1950 |
|
SU97099A3 |
| РУЧНАЯ ТЕЛЕЖКА ДЛЯ ПЕРЕМЕЩЕНИЯ БОЧЕК И СЛИВА ИЗ НИХ ЖИДКОСТЕЙ | 2008 |
|
RU2375228C1 |
| РУЧНАЯ ТЕЛЕЖКА | 1992 |
|
RU2022857C1 |
| РУЧНАЯ ТЕЛЕЖКА ДЛЯ ПЕРЕМЕЩЕНИЯ БОЧЕК | 1998 |
|
RU2143361C1 |
| Ручная тележка для перевозки штучных грузов | 1979 |
|
SU996248A1 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| Ручная тележка для транспортировки бочек | 1986 |
|
SU1384457A1 |
| Монорельсовая транспортная система | 1984 |
|
SU1230892A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ГРАВИТАЦИОННОГО СПУСКА ПИЛОМАТЕРИАЛОВ | 1939 |
|
SU58245A1 |
Изобретение относится к средствам механизации погрузоразгрузочных работ и может быть использовано для штабельного транспортирования изделий, например шин, коробок, брикетов, а также штучных грузов, например мешков, ящиков, бочек и т.д. Ручная тележка для транспортировки грузов содержит раму на колесах, захваты и механизм управления захватами. На концах двух захватов, заводимых за центр тяжести груза, и на продольной оси рамы тележки размещены клинообразные зацепы, нижние поверхности которых находятся в одной плоскости, проходящей касательно образующей колес. Оси поворота захватов перпендикулярны этой плоскости. Захваты подпружинены и через распорные звенья кинематически взаимосвязаны с педалью. Пружина снабжена натяжителем. Распорные звенья выполнены регулируемыми по длине. Техническим результатом изобретения является повышение производительности, функциональных возможностей тележки и надежности удержания груза. 2 з.п. ф-лы, 4 ил.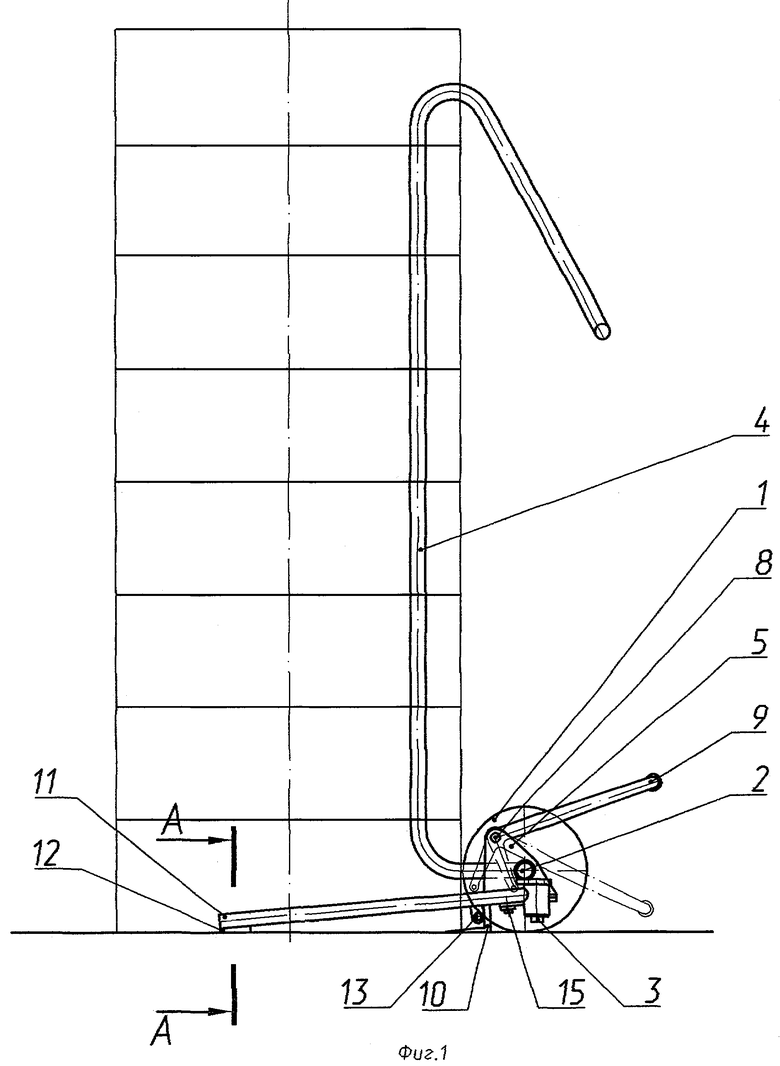
| Ручная тележка для транспортировки бочек | 1986 |
|
SU1384457A1 |
| US 6530584 В1, 11.03.2003 | |||
| US 3084820, 09.04.1963 | |||
| Управляемый запорный клапан | 1984 |
|
SU1551928A1 |

