Изобретение относится к машиностроению, в частности к гидравлическим управляемым клапанам гидропневмосистем, в которых требуется быстрое и надежное перекрытие магистрали по команде
Цель изобретения - повышение надежности работы клапана без отбора рабочей среды на регулирование скорости движения запорного органа, повышение быстродействия
На чертеже представлена принципиальная схема гидравлического клапана
Управляемый запорный клапан состоит из корпуса I, две герметичные полости 2 и 3 которого разделены подпружиненным (пружина 4) поршнем 5 В полости 2 сформированы два отверстия б и 7, связанные с рабочей магистралью В полости 3 сформировано отверстие 8, связанное с управляющей магистралью Клапан снабжен электромагнитом 9 соленоидного типа, потенциометром 10, источником 11 ЭДС и регулировочным резистором 12 Поршень 5 выполнен с хвостовиком 13, связанным жестко с движком 14 потенциометра 10 Обмотка 15 электромагнита 9, движок 14 потенциометра 10, рабочая часть 16 потенциометра 10, регулировочный резистор 12 и источник I I ЭДС образуют электрическую цепь по- следователы г-го включения этих элементов Рабочая чае.ь 16 потенциометра 10 меньше рабочего хода поршня 5 на величину
, где Н - ход поршня 5;
А// - ход движка 14 потенциометра 10 от исходного положения до начала контакта с обмоткой 15;
Н - длина обмотки 15 потенциометра 10.
Управляемый запорный клапан работает следующим образом.
При появлении давления в магистрали управления (в полости 3) поршень 5, хвостовик 13, движок 14 потенциометра 10 начинают перемещаться, преодолевая жесткость пружины 4, в направлении отверстий 6 и 7
При этом на участке, равном расстоянию от исходного положения до начала контакта движка 14 с рабочей частью 16. ток в электрической цепи отсутствует, скорость движения увеличивается от нуля до максимального значения х и, а динамическое состояние системы описывается уравнением
тх(Рущ. -Р )-5„-/ч -(F. +С„, -х где т - массы движущихся частей; Руяе - давление в управляющей магистрали; - давление в рабочей магистрали;
/Vp - сила трения, - усилие сжатие пружины; Se - площадь поршня; С - жесткость поршня
В момент, соответствующий началу контакта движка 14 с рабочей частью 16 потенциометра 10, в электрической цепи появляется ток, сила которого по мере перемещения движка 14 по рабочей части 16 увеличивается обратно пропорционально уменьшению сопротивления обмотки 15. Увеличение силы тока в цепи приводит к наведению электромагнитного поля электромагнита 9, причем усилие электромагнитного поля направлено в сторону, противополож- ную направлению движения поршня 5 и увеличивается по мере приближения его к отверстиям 6 и 7;
г Mn-KP-n -S
ЦК(х) где F, - усилие электромагнита; 5 Цо 4л 10 7 Гн/м - магнитная постоянная; I/ - напряжение источника ЭДС; п - число витков на единицу длины
соленоида ,
5шт - площадь поперечного сечения якоря соленоида;
- суммарное сопротивление электрической цепи без учета обмотки потенциометра;
R(x) - зависимость изменения сопротивления потенциометра от перемещения движка; 5х - перемещение поршня.
На участке хода поршня 5 от Н до Н ее -динамическое состояние описывается уравнением
(р -р )S«-/V -(ft. +С„-х)- 0ио(ц-1)УУ&«г
%Rt(x)+R,
Принимая закон изменения сопротивления потенциометра линейным, получают
ад 45М-И,
(-//.)+,««. (I)
где величина минимального сопротивления обмотки потенциометра выбирается из условия равенства силы электромагнитного поля и суммы остальных сил, действующих на поршень 5.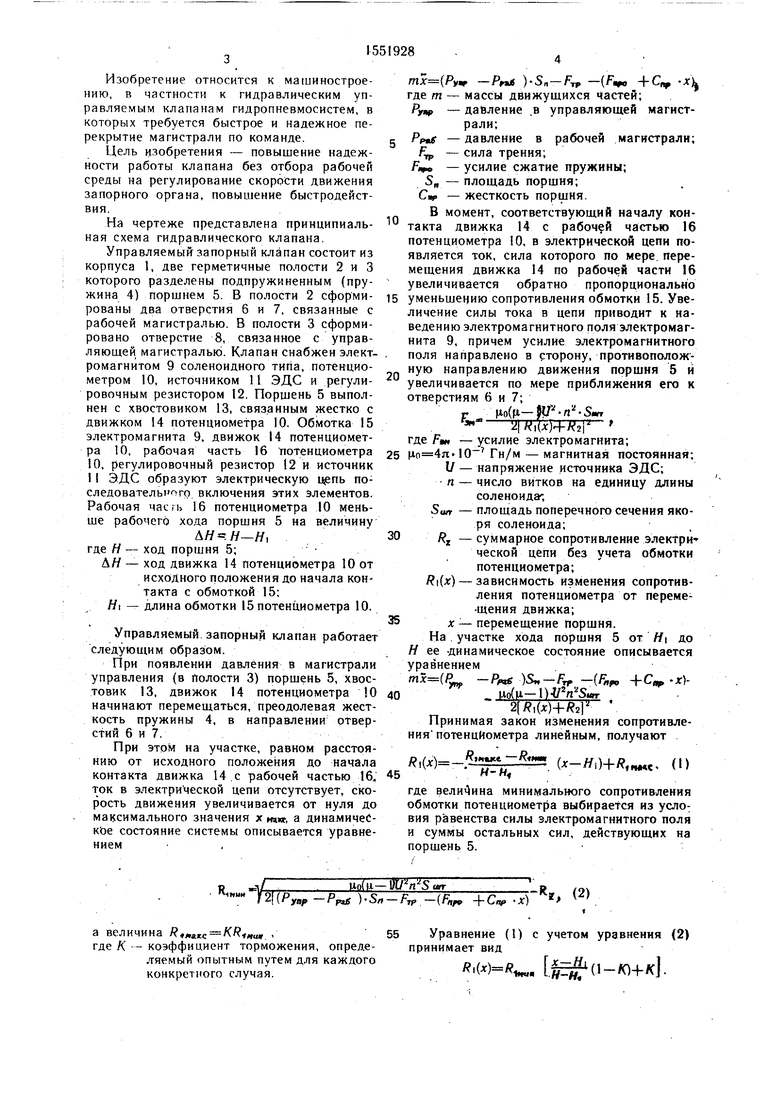
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР ДАВЛЕНИЯ | 2009 |
|
RU2397463C1 |
| СПОСОБ ВПРЫСКА ТОПЛИВА В ДИЗЕЛЬ И ТОПЛИВНЫЕ СИСТЕМЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2042859C1 |
| Система регулирования напряжения | 1990 |
|
SU1809419A1 |
| Регулятор давления | 1986 |
|
SU1359182A1 |
| Устройство управления клапаном | 1987 |
|
SU1516388A1 |
| Устройство автоматического регулирования давления жидкости в тормозах авиаколес | 1960 |
|
SU145140A1 |
| ПНЕВМАТИЧЕСКИЙ КЛАПАН С ПИЛОТНЫМ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ | 2010 |
|
RU2440531C1 |
| Управляемый клапан | 1987 |
|
SU1636614A1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ГАЗА В ТРУБОПРОВОДЕ | 1992 |
|
RU2036507C1 |
| Устройство управления двигателем внутреннего сгорания | 1988 |
|
SU1650936A1 |
Изобретение относится к гидравлическим управляемым клапанам гидропневмосистем, в которых требуется быстрое и надежное дистанционное перекрытие магистрали. Целью изобретения является повышение надежности работы клапана без отбора рабочей среды на регулирование скорости движения запорного органа и повышение быстродействия. Устройство обеспечивает безударную посадку поршня на седло клапана за счет отрицательной обратной связи, обеспечивающей снижение усилия, воздействующего со стороны соленоида на ферромагнитный хвостовик, жестко связанный с поршнем, по мере продвижения поршня к седлу клапана. Элементом отрицательной обратной связи является линейный потенциометр 10, длина рабочей части 16 которого равна рабочему ходу поршня 5, а движок 14 жестко закреплен на ферромагнитном хвостовике 13. 1 ил.
в -V.,ипСи-ИЛУЗшг ,
2|(PW -Р)-5Я-Г„ -(Рп„ + С. -х) К (2)
V
а величина К, КР,„и11 ,55 Уравнение (1) с учетом уравнения (2)
где А - коэффициент торможения, опреде-принимает вид
.тяемый опытным путем для каждогоD , , „ х - Hi ,. I
А,(х)(| (- AO+KJ.
конкретного случая
В момент касания поршнем 5 отверстия 6 движок 14 выходит из контакта с рабочей частью 16 потенциометра 10 и давлением в управляющей магистрали поджимается поршень 5 к отверстию 6 с усилием Герметизации. Проток среды по рабочей магистрали прекращается. При сбросе давления в управляющей мя.гистралн пружина 4 возвращает поршень 5 в исходное положение.
С помощью регулируемого резистора 12 обеспечивается изменение силы тока в электромагните 9 с целью подрегулирования скорости движения поршня 5 в процессе отладки или эксплуатации.
Формула изобретения
Управляемый запорный клапан, содержащий корпус с каналами подвода и отвода рабочей среды, запорный орган, выполненный в
виде поршня, шток которого связан с демпфирующим устройством, служащим для гни жения энергии соударения запорного орт на с седлом в процессе срабатывания, со леноид, установленный на корпусе соосно г поршнем демпфирующего устройства и образующий со штоком поршня электромагнит, отличающийся тем, что, с целью повыше ния надежности работы клапана без отбора рабочей среды на регулирование скорости движения запорного органа и повышения быстродействия, в цепь соленоида. являющегося элементом демпфирующего устройства, включен ползунковый потенциометр, движок которого жестко связан с хвостови- ком штока, выполненным из диэлектрического материала, при этом длина полного хода движка потенциометра равна полному ходу запорного органа, а начальный участок потенциометра выполнен неэлектропроводным.
0
