Изобретение относится к махолетам.
Известен летательный аппарат, содержащий крылья, привод их вертикального и горизонтального перемещения, включающий кривошипы и зубчатые колеса с одинаковым числом зубьев, кинематически связанные друг с другом, по описанию изобретения RU №2008239 С1, МПК В64С 33/00, БИ №4 28.02.94 г. (1)
Недостатком данной конструкции является его кинематическая сложность выполнения крыльями машущей динамики.
Целью изобретения является упрощение конструкции и расширение возможностей управления машущим полетом.
Поставленная задача достигается тем, что летательный аппарат содержит крылья, привод их вертикального и горизонтального перемещения, включающий кривошипы и зубчатые колеса с одинаковым числом зубьев, кинематически связанные друг с другом. Привод выполнен с кривошипами, закрепленными на штоках, проходящих внутри осей зубчатых колес, с возможностью совместного вращения зубчатых колес, их осей и штоков с кривошипами и с возможностью перемещения штоков с кривошипами вдоль осей.
Штоки имеют возвратные пружины, а на кривошипах расположены втулки с возможностью их перемещения по валам, зафиксированным в закрепленных карданных шарнирах и с возможностью качания валов в карданных шарнирах без их осевого вращения и их осевого перемещения. На валах находятся крепления для фиксации в них осей крыльев.
При совместном вращении зубчатых колес с осями, штоками и с закрепленными на штоках кривошипами со втулками, через которые пропущены валы, происходит перемещение валов, зафиксированных в закрепленных карданных шарнирах по конической образующей без их осевого вращения и осевого перемещения. В связи с этим размещенные на валах крепления перемещаются совместно с валами. При этом крепления с зафиксированными в них осями крыльев и сами крылья описывают маховую траекторию.
При рассмотрении положений направлений оси крыла, перемещающегося по траектории маха, можно отметить четыре наиболее характерные точки прохождения оси крыла по этой траектории.
Это наибольшее угловое отклонение оси крыла от плоскости, перпендикулярной осям вращения зубчатых колес вверх и вниз (+α и -α) (см. чертеж), а также два положения, при которых ось крыла параллельна сама себе. При этом в двух последних положениях крыло будет повернуто вокруг оси крыла также на +α в одном положении и -α в другом положении относительно той же плоскости (на чертеже не показаны). Здесь рассмотрен вариант расположения центра качания карданного шарнира на линии геометрической оси вращения кривошипа и условия перпендикулярности расположения оси крыла к валу.
При рассмотрении движения крыла, имеющего угол атаки, выявляется несимметрия прохождения крыла по траектории его махового движения. При углах отклонения оси крыла вверх +α и вниз -α и повороте оси крыла в двух других положениях тоже на углы +α и -α можно подобрать такой угол атаки (теоретически он должен быть равен углу α, но из соображений условий обтекания крыла и его срывных характеристиках он может отличаться от указанного), при котором крыло будет двигаться вперед с положительным углом атаки, создавая подъемную силу, затем, переходя по нисходящей траектории, загребая и отбрасывая воздух вниз и назад и снова возвращаться в исходную точку начала движения без сколько-нибудь заметного противодействия созданной им подъемной и перемещающей вперед силе.
Траекторию махового движения крыла возможно осуществить как при вертикальном расположении осей зубчатых колес со штоками и расположенными на штоках кривошипами, так и при горизонтальном их расположении. В первом случае при вертикальном расположении вышеперечисленных элементов конструкции маховое движение вверх-вниз будет определяться углами отклонения осей крыльев, а перемещение крыла вперед и назад - линейными размерами кривошипов.
Во втором случае при горизонтальном расположении этих же элементов маховое движение вверх-вниз будет определяться величиной кривошипов, а перемещение вперед-назад - величиной угла отклонения осей крыльев.
При таких крайних вариантах движения крыльев возможен выбор варианта наклонного расположения элементов конструкции, в котором и передвижение крыла вверх-вниз, и вперед - назад будет оптимизировано для получения наилучших параметров маховой траектории.
В связи с тем, что при работе крыльев имеются точки траектории их передвижения, в которых подъемная сила мала или даже может отсутствовать, на штоках установлены возвратные пружины, дающие возможность устранения искажений траектории движения в этих точках и сглаживания ударных нагрузок на привод крыльев. Кроме того, возвратные пружины выполняют роль поддержки крыльев на стоянке в неработающем положении.
Управление летательным аппаратом осуществляется следующим образом.
Для придания лучших стартовых усилий штоки с кривошипами перемещаются, передвигая шарнирно закрепленные на них втулки по валам, увеличивая углы маха крыльев вверх-вниз и их движение вперед-назад, что приводит к увеличению подъемной силы и тяги. При возникновении в процессе взлета и самого машущего полета кренов их можно парировать, увеличивая или уменьшая тягу и подъемную силу любого крыла путем перемещения соответствующих штоков с кривошипами.
Посадка может быть осуществлена как в рабочем режиме с машущими крыльями, так и с их остановкой в положении наилучшего угла атаки при данной скорости планирования. Возможно осуществлять «птичью» посадку, увеличивая угол атаки крыльев перед соприкосновением с поверхностью, что приводит почти к точечному касанию аппаратом земли. В качестве аналога предлагаемого изобретения взят «Летательный аппарат системы И.И.Кравченко» по источнику информации (1).
На чертеже изображен летательный аппарат.
Предлагаемый летательный аппарат состоит из следующих узлов и деталей.
Летательный аппарат имеет крылья 8 с осями крыльев 9, расположенные в креплениях 7. Крепления 7 размещены на валах 10. Валы 10 зафиксированы в закрепленных карданных шарнирах 11 и пропущены сквозь втулки 6, которые расположены на кривошипах 5, закрепленных на штоках 4. Имеются два кинематически связанных зубчатых колеса 2 с одинаковым числом зубьев с осями 3 и возвратные пружины 1.
Летательный аппарат работает следующим образом.
При совместном вращении зубчатых колес 2 с осями 3 и штоками 4, на которых закреплены кривошипы 5 со втулками 6, происходит перемещение зафиксированных в закрепленных карданных шарнирах 11 валов 10 по конической образующей. При этом крепления 7 со вставленными в них и зафиксированными осями крыльев 9 и сами крылья 8 описывают машущую траекторию. При необходимости возможно парирование кренов при взлете и в процессе полета. Это можно выполнить путем перемещения нужного штока 4 с кривошипом 5 и втулкой 6 по соответствующему валу 10, создавая на необходимом крыле 8 дополнительную подъемную силу или уменьшая ее. При этом возвратные пружины 1 выполняют роль поддержки крыльев в точках маховой траектории со знакопеременными нагрузками. Для создания взлетного режима увеличение подъемной силы производят на обоих крыльях 8 путем одновременного перемещения штоков 4 с кривошипами 5.
Некоторое демпфирование машущего крыла при его работе в неспокойной атмосфере может дать замена карданных шарниров на пружинные элементы, дающие некоторую угловую свободу перемещений валов вокруг своей оси, а также некоторого осевого их перемещения и соответственно связанных с ними крыльев.
Возможно применение на летательном аппарате тендема из двух пар крыльев, расположенных одна за другой, что приведет, на взгляд заявителя, к улучшению управляемости полетом в связи с неэффективностью работы обычного самолетного оперения, применяемого в данном случае при небольших скоростях полета.
Летательный аппарат может быть применен для изучения принципов машущего полета.
Литература
1. «Летательный аппарат системы И.И.Кравченко». RU №2008239 С1, МПК В64С 33/00, БИ №4 28.02.94 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ОРНИТОПТЕРА | 2002 |
|
RU2236988C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| ОДНОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2216474C2 |
| Способ создания подъемной силы летательного аппарата | 2024 |
|
RU2831867C1 |
| ВОЛНОВОЙ АНТИКАВИТАЦИОННЫЙ ГИДРОДВИЖИТЕЛЬ | 2002 |
|
RU2242398C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХСЕКЦИОННОГО СОЧЛЕНЕННОГО ВЕЗДЕХОДНОГО ТРАНСПОРТНОГО СРЕДСТВА И ЕГО ТРАНСМИССИЯ | 2001 |
|
RU2197403C2 |
| УПРАВЛЯЕМОЕ КРЫЛО ПРОПЕЛЛЕРНОГО ТИПА | 2015 |
|
RU2583426C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| Механизм привода крыла орнитоптера | 1979 |
|
SU878652A1 |
Изобретение относится к летательным аппаратам. Летательный аппарат содержит два машущих крыла, привод их вертикального и горизонтального перемещения, кривошипы и зубчатые колеса с одинаковым числом зубьев. Оси крыльев зафиксированы в соответствующих им креплениях, размещенных на своих валах. Валы зафиксированы в закрепленных карданных шарнирах с возможностью качания валов без их осевого вращения и осевого перемещения. При этом валы пропущены через втулки, расположенные на кривошипах. Кривошипы закреплены на штоках, проходящих внутри осей зубчатых колес, и совместно вращаются с ними. Штоки с кривошипами имеют возможность перемещения вдоль осей зубчатых колес, при этом втулки перемещаются по валам. Дополнительно устройство содержит возвратные пружины, поддерживающие кривошипы со штоками в их исходном положении. Изобретение направлено на упрощение конструкции и расширение возможностей управления полетом. 1 з.п. ф-лы, 1 ил.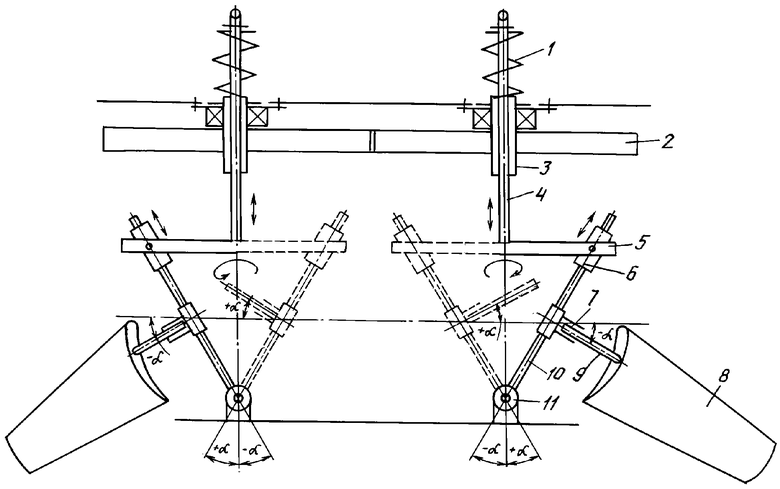
| ЛЕТАТЕЛЬНЫЙ АППАРАТ СИСТЕМЫ И.И.КРАВЧЕНКО | 1991 |
|
RU2008239C1 |
| Модель летательного аппарата | 1990 |
|
SU1818274A1 |
| Клиновой коуш | 1988 |
|
SU1579882A2 |
| GB 1263079 A, 09.02.1972 | |||
| :РЕГУЛИРУЕМАЯ ТЕПЛОВАЯ ТРУБКА | 0 |
|
SU383973A1 |
| GB 191509931 A, 24.02.1916. | |||

