Изобретение относится к деталям машин и может быть использовано в качестве механизма поворота для гусеничных машин.
Существует система управления поворотом с бортовыми фрикционами, в которой используется принцип скольжения, предназначенная для управления поворотом гусеничной машины (стр. 223, Вонг Дж. Теория наземных транспортных средств: Пер. с англ. - М.: Машиностроение, 1982. - 284 с.) и принятая за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при применении известной системы управления поворота, принятой за прототип, относятся: управление поворотом за счет создания тормозного момента, высокие усилия водителя для создания тормозного момента, величина которого постоянно изменяется по ряду причин (нестабильность характеристик фрикционных материалов при нагреве, изменение рабочих зазоров); необходимость регламентных и ремонтных работ по мере износа тормозной колодки; необходимость выключения сцепления для отсоединения гусеницы от привода.
Технический результат - повышение точности и легкости управления гусеничным транспортным средством посредством обычного рулевого колеса, снижение физических затрат водителя при маневрировании.
Особенность заключается в том, что предлагаемое устройство имеет в качестве органа управления рулевое колесо, в зависимости от угла поворота которого и скорости движения транспортного средства назначается скорость вращения каждой гусеницы.
Сущность изобретения заключается в следующем: устройство встраивается в гусеничное транспортное средство параллельно механической системе поворота с бортовыми фрикционами и имеет электронную систему, состоящую из датчика угла поворота рулевого вала, цифрового спидометра, устанавливающего линейную скорость транспортного средства, блока управления, определяющего радиус поворота транспортного средства при движении, исходя из угла поворота рулевого колеса и скорости движения транспортного средства, и находящего по заданному алгоритму необходимую скорость вращения катков каждой из гусениц, и выдающего требуемый ток разной полярности от аккумулятора и генератора подзарядки на исполнительные механизмы в виде высокомоментного электродвигателя постоянного тока на каждой из полуосей мостов транспортного средства, причем якорь встраивается в полуось, а статор в кожух полуоси моста, а последовательно им включенные нормально замкнутые электромагнитные муфты не передают возвратно-поступательные движения зубчатой рейки через боковые тяги на бортовые фрикционы.
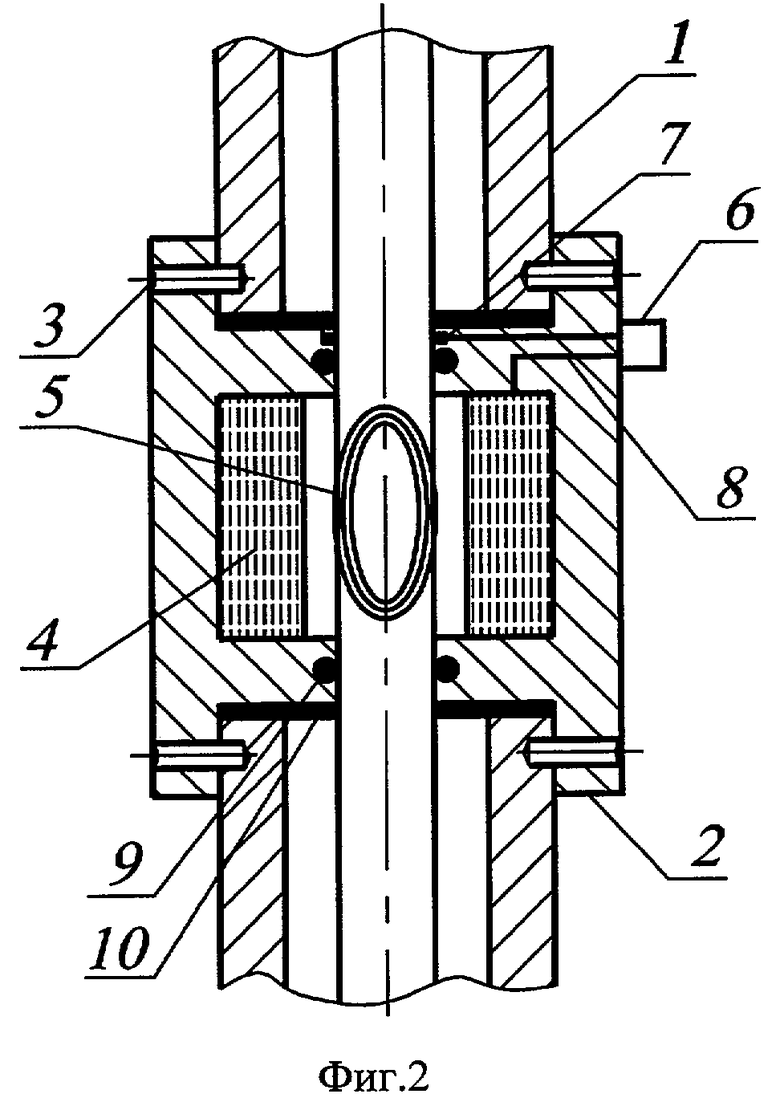
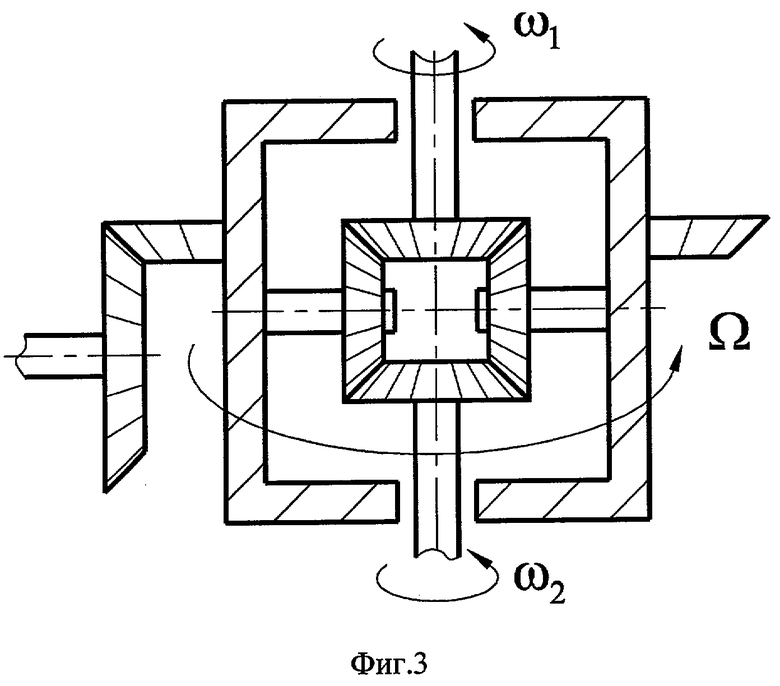
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема устройства, на фиг.2 изображен электродвигатель в мосту транспортного средства, на фиг.3 - механизм мостового дифференциала, на фиг.4 - блок-схема работы устройства.
Устройство содержит (фиг.1): механическое рулевое управления «шестерня 1 - зубчатая рейка 2», нормально замкнутые электромагнитные муфты 3 в сочленении «зубчатая рейка 2 - боковые тяги 4», бортовые фрикционы 5, тормозные диски 6, датчик угла поворота рулевого колеса 7, цифровой спидометр 8, электронный блок управления 9, аккумулятор 10, генератор 11, мостовой дифференциал 12 и электродвигатели 13.
Работа устройства осуществляется следующим образом: при повороте рулевого колеса зубчатая рейка 2 совершает поступательное движения в требуемую сторону поворота транспортного средства, на электронный блок управления 9 поступает сигнал с датчика угла поворота рулевого колеса 7 - угол отклонения α рулевого колеса от нейтрального положения. Электронный блок управления одновременно получает с цифрового спидометра 8 действительную линейную скорость движения транспортного средства V в данный момент. В блоке управления вычисляются требуемые частоты вращения ведущих катков гусениц и определяются управляющие токи для каждого электродвигателя 13, замедляющего либо ускоряющего тяговый момент, распределяемый от двигателя мостовым дифференциалом 12. Подача управляющих токов происходит с аккумулятора 10, подзаряжаемого во время движения транспортного средства генератором 11. Во время движения транспортного средства, его нормальной работы, в цепи, последовательно соединенной с приводом электродвигателей, течет ток, по величине необходимый для разъединения нормальной замкнутой электромагнитной муфты 3. При этом возвратно-поступательные движения зубчатой рейки 2, описывающей поворот транспортного средства, не передаются боковым тягам 4, фрикционы 5 совершают свободные вращательные движения. При обрыве электрической цепи и возникновении иных неисправностей в системе управления электродвигателями 13 электромагнитные муфты 3 замыкаются и передают усилие от зубчатой рейки 2 к боковым тягам 4, прижимая тем самым бортовые фрикционы 5 к тормозным дискам 6, уменьшая у требуемой гусеницы скорость вращения. Таким образом, транспортное средство в аварийных режимах управляется механическим путем.
На фиг.2 - конструктивное изображение реализации установки электродвигателя. Кожух полуоси моста 1 вырезается на величину корпуса электродвигателя 2, и они взаимно фиксируется штифтами 3. В корпусе электродвигателя находится статор электромотора 4, а в полуоси ведущего моста - якорь 5. Электроток подается на колодку 6, откуда на якорь через щетки 7 и на статор через проводку корпуса 8. Для защиты электродвигателя от трансмиссионного масла, находящегося в кожухе моста, предназначены прокладки 9 и манжеты 10.
На фиг.3 показан механизм дифференциала ведущего моста. Предположим, что центр гусеничного транспортного средства описывает окружность радиуса R. Если расстояние между гусеницами будет d, то радиус внешней окружности будет  а внутренней
а внутренней  Пусть скорость центра транспортного средства V. Тогда, если радиус ведущих катков гусеницы равен r, то угловая скорость первой шестерни будет
Пусть скорость центра транспортного средства V. Тогда, если радиус ведущих катков гусеницы равен r, то угловая скорость первой шестерни будет
 а второй
а второй  Угловая скорость кожуха
Угловая скорость кожуха  и относительная угловая скорость сателлитов
и относительная угловая скорость сателлитов 
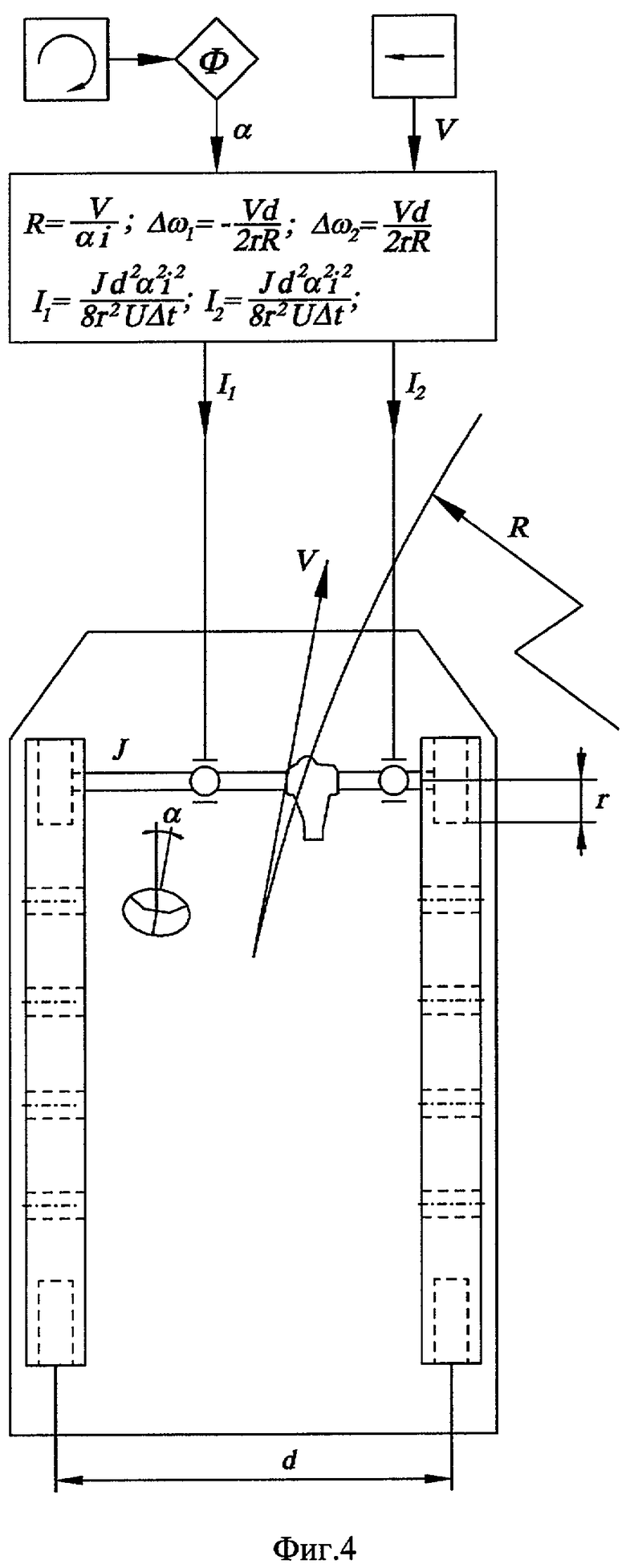
Алгоритм вычисления управляющих токов следующий (фиг.4): при входе транспортного средства в поворот на блок управления через фильтр Ф, в целях подавления белого шума, поступает мгновенное значение угла поворота рулевого колеса α от нейтрального положения, одновременно поступает сигнал со спидометра V. Далее определяется с учетом заложенного в блок управления передаточного числа рулевого управления радиус поворота 
Для достижения требуемой угловой скорости первого ведущего катка а второго  являющейся оптимальной и позволяющей гусеничному транспортному средству входить в заданный водителем поворот, необходимо один из катков докрутить, а второй притормозить на величину
являющейся оптимальной и позволяющей гусеничному транспортному средству входить в заданный водителем поворот, необходимо один из катков докрутить, а второй притормозить на величину 
Для этого необходимо совершить работу, равную
где J - приведенный момент инерции вращающихся масс ведущей оси.
Электродвигателю необходимо совершить работу
А=UIΔt,
где U - напряжение в управляющей сети транспортного средства, Δt - время совершения работы.
Соответственно управляющий ток:  для ведущих катков разных гусениц с разной полярностью, одинаковым значением:
для ведущих катков разных гусениц с разной полярностью, одинаковым значением: 
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ КОЛЕС АВТОМОБИЛЯ ПРИ ПОВОРОТЕ | 2004 |
|
RU2285624C2 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2138419C1 |
| ГУСЕНИЧНАЯ МАШИНА | 2000 |
|
RU2211166C2 |
| ВАРИАТОРНЫЙ МЕХАНИЗМ ПОВОРОТА САМОХОДНЫХ МАШИН | 2003 |
|
RU2240246C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2009062C1 |
| Транспортное средство повышенной проходимости Колобова К.А. | 1989 |
|
SU1717426A1 |
| КОМБИХОД | 2007 |
|
RU2347709C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ОСОБО ВЫСОКОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2547126C2 |
Изобретение относится к области машиностроения и может быть использовано в качестве механизма поворота для гусеничных машин. Сущность изобретения заключается в том, что параллельно механической системе поворота с бортовыми фрикционами встроена электронная система. Электронная система состоит из датчика угла поворота рулевого вала, цифрового спидометра, устанавливающего линейную скорость транспортного средствами блока управления. Блок управления определяет радиус поворота транспортного средства при движении, исходя из угла поворота рулевого колеса и скорости движения транспортного средства, и находит по заданному алгоритму необходимую скорость вращения ведущих катков каждой из гусениц. Блок управления выдает от аккумулятора и генератора подзарядки требуемый ток разной полярности, но одинакового значения, на исполнительные механизмы в виде высокомоментных электродвигателей постоянного тока, замедляющих или ускоряющих тяговый момент, распределяемый от двигателя мостовым дифференциалом. Электродвигатели установлены на каждой из полуосей мостов транспортного средства. Якорь встроен в полуось, а статор в кожух полуоси моста. Последовательно электродвигателям включены нормально замкнутые электромагнитные муфты. Техническим результатом является повышение точности и легкости управления, снижение физических затрат водителя при маневрировании. 4 ил.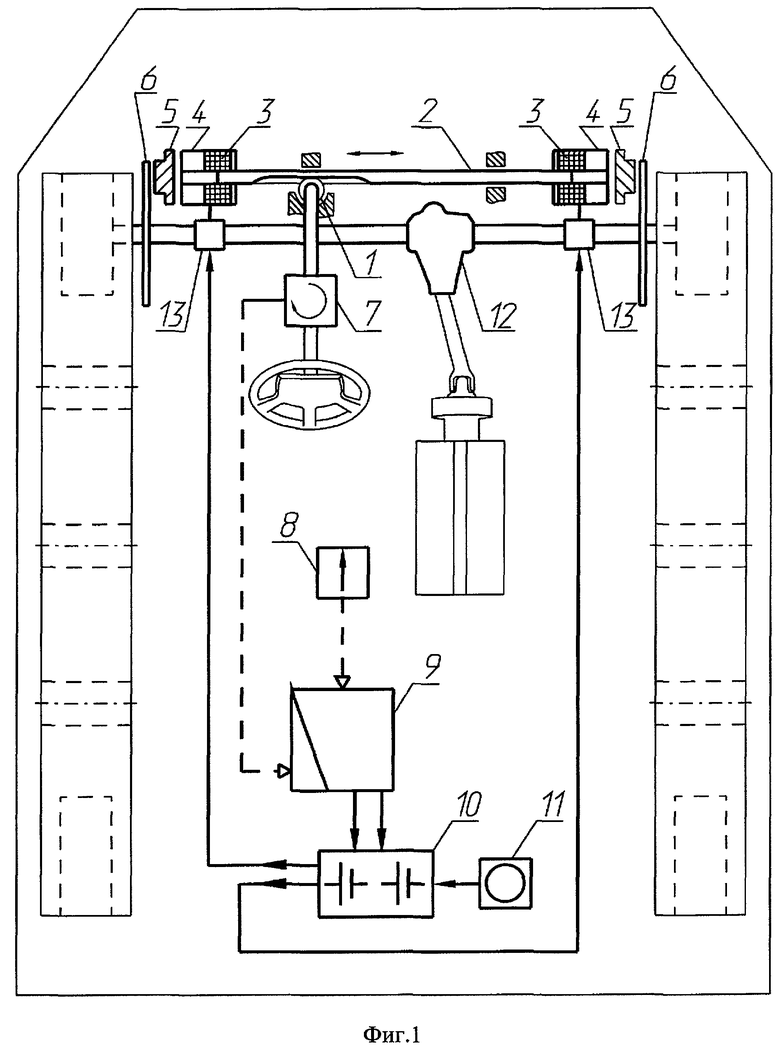
Устройство управления транспортным средством на гусеничном ходу, отличающееся тем, что параллельно механической системе поворота с бортовыми фрикционами встроена электронная система, состоящая из датчика угла поворота рулевого вала, цифрового спидометра, устанавливающего линейную скорость транспортного средства, блока управления, определяющего радиус поворота транспортного средства при движении, исходя из угла поворота рулевого колеса и скорости движения транспортного средства, и находящего по заданному алгоритму необходимую скорость вращения ведущих катков каждой из гусениц и выдающего от аккумулятора и генератора подзарядки требуемый ток разной полярности, но одинакового значения, равного
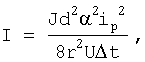
где J - приведенный момент инерции вращающихся масс рассматриваемой оси транспортного средства, d - расстояние между гусеницами, α - угол поворота рулевого вала, ip - заложенное в блок управления передаточное число рулевого управления, r - радиус ведущих катков, U - напряжение в управляющей сети транспортного средства, Δt - время совершения работы, на исполнительные механизмы в виде высокомоментных электродвигателей постоянного тока, замедляющих или ускоряющих тяговый момент, распределяемый от двигателя мостовым дифференциалом, установленных на каждой из полуосей мостов транспортного средства, причем якорь встроен в полуось, а статор - в кожух полуоси моста, а последовательно им включены нормально замкнутые электромагнитные муфты.
| ВОНГ ДЖ | |||
| Теория наземных транспортных машин | |||
| М.: Машиностроение, 1982, с.223 | |||
| СИСТЕМА УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1992 |
|
RU2026226C1 |
| DE 1154724 А, 19.09.1969 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ЯЗЫК С СОУСОМ ИЗ ЗЕЛЕНОГО ГОРОШКА" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2332026C1 |
| US 4023637 А, 17.05.1977. | |||

