Изобретение относится к транспортному машиностроению и, в частности, может быть использовано в тракторах, самоходных машинах, полугусеничных тягачах и транспортерах.
Известна самоходная машина, содержащая двигатель, соединенный через коробку передач и раздаточную коробку с механизмом поворота, выполненным в виде двойного дифференциала, фрикционного вариатора, связанного со второй полуосевой шестерней дифференциала, соединенного с рулевым колесом, и маломоментного фрикциона на водило дифференциала [Авторское свидетельство СССР №1311954, МПК В 60 К 41/28, 1987].
Недостатком данной конструкции являются большие потери мощности в тормозных фрикционах при повороте, практически постоянная работа фрикционов при движении по местности приводит к преждевременному выходу из строя данных механизмов и снижению надежности конструкции; импульсный режим поддержания заданной кривизны траектории движения приводит к дополнительным нагрузкам на элементы трансмиссии.
Наиболее близким техническим решением, выбранным в качестве прототипа, является самоходная машина, содержащая механизм поворота, в котором полуоси привода гусениц связаны с дисковыми фрикционными вариаторами с внутренним контактом стальных конических дисков, которые установлены на качающейся рамке и управляются рулевым механизмом [Авторское свидетельство СССР №1368219, МПК В 62 D 11/18].
Недостатком данной конструкции является то, что при повороте не сохраняется скорость прямолинейного движения машины, что при использовании комбинированного (например, колесно-гусеничного) движителя не позволяет кинематически согласовать работу различных элементов движителя самоходной машины при движении по криволинейной траектории. Данный механизм обладает малым диапазоном регулирования радиусов поворота из-за малого диапазона изменения передаточных чисел дисковых фрикционных вариаторов. К недостаткам механизма поворота также следует отнести сложность изготовления, относительно малый КПД вследствие большого скольжения между дисками вариатора.
Технический результат изобретения направлен на улучшение управляемости машины с комбинированным движителем за счет реализации кинематически согласованного действия колесной и гусеничной схем поворота, а также повышение точности регулирования поворота за счет гусеничного движителя.
Технический результат достигается тем, что машина с комбинированным движителем, включающим колесный и гусеничный привод, содержащая двигатель, связаный через коробку передач и раздаточную коробку с колесным и гусеничным движителем, оснащена рулевым управлением, обеспечивающим с помощью системы тяг и рычагов оппозитный поворот управляемых колес, при этом гусеничный движитель дополнительно снабжен механизмом поворота, выполненным в виде двойного конического симметричного дифференциала, полуоси которого связаны через бортовые передачи с ведущими зубчатыми колесами гусеничного движителя, а солнечные шестерни дифференциала связаны через зубчатые передачи с механизмом регулирования поворота, выполненным в виде фрикционного торового вариатора с двумя параллельными секциями, которые связаны через механизм управления с рулевым механизмом.
Отличительными признаками от прототипа является то, что гусеничный движитель снабжен механизмом поворота, выполненным в виде двойного конического симметричного дифференциала, полуоси которого связаны через бортовые передачи с ведущими звездочками гусениц, а солнечные шестерни дифференциала связаны через шестеренные передачи с механизмом регулирования поворота, выполненным в виде фрикционного торового вариатора с двумя параллельными секциями, и механизмом согласования с колесным рулевым управлением.
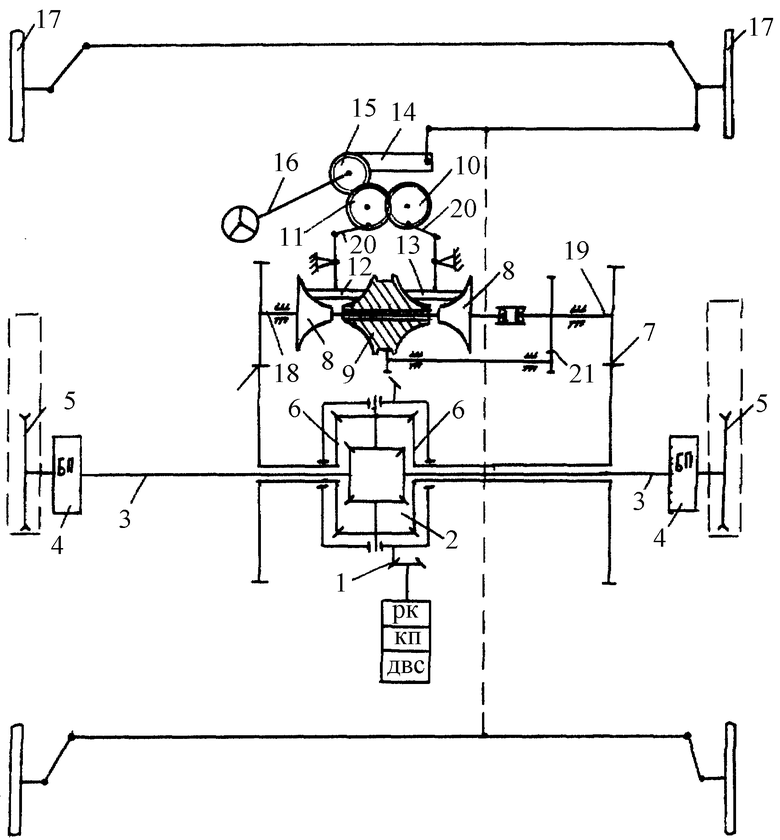
На чертеже дана принципиальная кинематическая схема рулевого управления машины с комбинированным движителем.
Рулевое управление машины с комбинированным (колесно-гусеничным) движителем включает двигатель, связаный с механизмом поворота через коническую главную передачу 1, конический симметричный двойной дифференциал 2, полуоси 3 дифференциала, связаные через бортовые передачи 4 с ведущими звездочками гусениц 5, солнечные шестерни 6 дифференциала, связаные через зубчатые передачи 7 с механизмом регулирования поворота, выполненным в виде фрикционного торового вариатора с двумя параллельными секциями. Торовые диски 8 связаны с левой солнечной шестерней 6 дифференциала 2, а диски 9 связаны с правой солнечной шестерней 6 дифференциала 2. Синхронная работа секций обеспечивается механизмом управления, которой включает зубчатые колеса 10 и 11, находящиеся в зацеплении и связаные через тяги с рычагами поворота роликов 12 и 13. Механизм управления кинематически связан с рулевым управлением колесного движителя 14 через шестерню 15. Поворотная шестерня 15 связанна с валом рулевой колонки 16.
В исходном положении при прямолинейном движении рулевое колесо находится в среднем положении, ролики вариатора 12 и 13 находятся в нейтральном положении, когда передаточное число вариатора равно единице. Валы 18 и 19 вращаются с одинаковой скоростью, правая и левая шестеренная передачи 7 вращаются с одинаковой скоростью, следовательно, с одинаковой скоростью вращаются и зубчатые колеса пять. Машина движется прямолинейно.
При повороте, например, налево управляемые колеса при помощи рулевого механизма поворачиваются влево. Шестерня 15, связанная с валом рулевой колонки 16, поворачивается и, находясь в зацеплении с зубчатым колесом 11, поворачивает его. Ролик 12 посредством тяги 20 переводится вправо. Ролик 13 переводится влево на такое же значение, так как передаточное число зацепления зубчатых колес 10 и 11 равно единице.
Таким образом изменяется передаточное число вариатора. Диск 9 начинает вращаться быстрее диска 8. Следовательно, вал 19 начинает вращаться быстрее, а вал 18 - медленнее.
Благодаря этому редуцированию и кинематической связи солнечных шестерен 6 и полуосей 3 посредствам дифференциала обеспечивается ускоренное вращение левой и замедленное вращение правой полуосей 3.
Изменение направления движения машины обеспечивается посредством перемещения роликов 12 и 13 в зависимости от поворота рулевого колеса и управляемых колес в ту или иную сторону. Величена радиуса поворота и его непрерывное изменение от прямолинейного движения транспортного средства до движения с минимальным радиусом обеспечивается бесступенчатым изменением передаточного отношения между дисками 8 и 9.
Торовая фрикционная передача с двумя параллельными секциями обеспечивает увеличение передаваемой мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2005 |
|
RU2297355C2 |
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ОСОБОВЫСОКОЙ ПРОХОДИМОСТИ | 2011 |
|
RU2570016C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ОСОБО ВЫСОКОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2547126C2 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2138419C1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ КОЛОБОВА К.А. | 1997 |
|
RU2144867C1 |
| Транспортное средство повышенной проходимости Колобова К.А. | 1989 |
|
SU1717426A1 |
| Бесступенчатый механизм поворота В.С.Козлова для транспортного средства | 1990 |
|
SU1740228A1 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
Изобретение относится к транспортному машиностроению и, в частности, может быть использовано в тракторах, самоходных машинах, тягачах и транспортерах. Самоходная машина содержит двигатель, коробку передач и раздаточную коробку с колесным и гусеничным движителем. Силовой привод гусеничного движителя имеет механизм поворота, выполненный в виде двойного конического симметричного дифференциала 2. Полуоси 3 дифференциала 2 связаны через бортовые передачи 4 с зубчатыми колесами гусеничного движителя. Солнечные шестерни 6 дифференциала 2 связаны через зубчатые передачи 7 с механизмом регулирования поворота. Упомянутый механизм выполнен в виде фрикционного торового вариатора с двумя параллельными секциями. Упомянутые секции связаны через механизм управления с рулевым механизмом. Технический результат - улучшение управляемости машины за счет кинематически согласованного действия колесной и гусеничной схем поворота и повышение точности поворота. 1 ил.
Самоходная машина с комбинированным движителем, содержащая двигатель, связанный через коробку передач и раздаточную коробку с колесным и гусеничным движителем, отличающаяся тем, что силовой привод гусеничного движителя дополнительно снабжен механизмом поворота, выполненным в виде двойного конического симметричного дифференциала, полуоси которого связаны через бортовые передачи с ведущими зубчатыми колесами гусеничного движителя, а солнечные шестерни дифференциала связаны через зубчатые передачи с механизмом регулирования поворота, выполненным в виде фрикционного торового вариатора с двумя параллельными секциями, которые связаны через механизм управления с рулевым механизмом.
| Бесступенчатый механизм поворота транспортного средства | 1986 |
|
SU1368219A1 |
| Бесступенчатый механизм поворота В.С.Козлова для транспортного средства | 1990 |
|
SU1740228A1 |

