Изобретение относится к ракетной технике и может быть использовано в комплексах вооружения телеуправляемых ракет.
Известен способ управления ракетой, включающий запуск ракеты под углом к линии наведения, разгон ракеты с помощью стартового двигателя, определение отклонения ракеты от расчетной траектории полета, формирование команды управления, пропорциональной отклонению ракеты от требуемой траектории, и передачу команды управления на ракету для наведения ее на цель ([1] A.A.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, стр.327-330), в котором при формировании управления не учитывается воздействие на движение ракеты поперечного (относительно заданного направления стрельбы) ветра.
Неучет при формировании управления ракетой поперечной составляющей скорости ветра в условиях стрельбы при ветре приводит к недостаткам:
- увеличивается рассеивание и снижается точность встреливания ракеты в поле захвата пеленгатора для последующего измерения координат (пеленгации) ракеты и управления ее по отклонению от линии наведения;
- повышается вероятность выхода ракеты из информационного луча пеленгатора, снижается точность наведения ракеты в ближней зоне поражения и увеличивается мертвая зона комплекса вооружения.
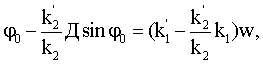
Особенность движения ракеты при наличии ветра заключается в том ([2] А.А.Дмитриевский. Внешняя баллистика. - М.: Машиностроение, 1979, стр.344-352), что воздействие поперечного (бокового) ветра создает дополнительную аэродинамическую силу, приложенную в центре давления ракеты. Под действием момента от этой силы управляемая ракета (т.к. она статически устойчива) развернется головной частью навстречу ветру так, что ее продольная ось будет совпадать с вектором воздушной скорости (скорости относительно перемещающейся атмосферы). Угол разворота оси ракеты определяется так называемым ветровым углом атаки, величина которого, в установившемся состоянии, равна
где w - поперечная составляющая скорости ветра;
V - путевая скорость ракеты.
При наличии ветрового угла атаки αw на разгонном участке ракеты появится поперечная (боковая) составляющая силы тяги разгонного двигателя ракеты, направленная против ветра, под действием которой ракета будет также перемещаться против ветра, вызывая линейное (или соответствующее угловое) отклонение ракеты (ее центра масс) и угловой разворот ракеты (ее продольной оси и связанного с ней вектора скорости) относительно заданного направления стрельбы.
Под линейным (угловым) отклонением ракеты понимается расстояние (угол) между заданным направлением запуска ракеты и положением центра масс ракеты (касательной к траектории) в плоскости движения на определенной дальности полета ракеты. Под углом разворота ракеты понимается угол между заданным направлением запуска ракеты и продольной осью ракеты в плоскости движения. Линейное (угловое) отклонение и угловой разворот ракеты определяют рассеивание соответственно траектории и вектора скорости ракеты на фиксированной дальности. Величины линейного отклонения и углового разворота для данной ракеты на фиксированной дальности полета определяются значением скорости поперечного ветра и при определенных условиях могут привести даже к срыву управления ракетой.
Известен способ стрельбы неуправляемыми артиллерийскими (нереактивными) снарядами, при котором измеряется скорость ветра и в направление стрельбы вводится поправка на снос снаряда ветром ([3] Л.Н.Преснухин, Л.А.Соломонов и др. Основы теории и проектирования вычислительных приборов и машин управления. - М.: Высшая школа, 1970, стр.240-244). Ветровая поправка формируется пропорционально поперечной составляющей скорости ветра ([2] А.А.Дмитриевский. Внешняя баллистика. - М.: Машиностроение, 1979, стр.356-359). В силу конструктивных особенностей артиллерийских снарядов (отсутствия разгонного двигателя и отсутствия (или малого) оперения по сравнению с управляемыми ракетами) при воздействии поперечного ветра они получают только смещение траектории (центра масс) относительно заданного направления стрельбы в направлении ветра.
Такой способ стрельбы за счет введения угловой поправки на упреждающий угол разворота пусковой установки против направления ветра, равный
где  - коэффициент чувствительности линейного отклонения снаряда Z к поперечному ветру на фиксированной дальности Д;
- коэффициент чувствительности линейного отклонения снаряда Z к поперечному ветру на фиксированной дальности Д;
w - поперечная скорость ветра,
позволяет на заданной дальности Д компенсировать линейный снос снаряда Z от заданного направления стрельбы, вызванный воздействием поперечного ветра. Однако такой способ компенсации ветрового воздействия не удовлетворяет требованием управления ракетой, так как, во-первых, упреждающий угловой разворот пусковой установки для запуска управляемой ракеты должен проводиться не против ветра, а в направлении ветра, а, во-вторых, такой способ компенсирует только линейное смещение траектории (центра масс), при этом угловой разворот ракеты, вызываемый ветровым воздействием, сохраняется и тем самым определяется дополнительная составляющая ветрового рассеивания ракеты.
Наиболее близким к предлагаемому способу по совокупности существенных признаков является способ управления ракетой, включающий запуск ракеты под углом к линии визирования цели (ЛВЦ), разгон ракеты с помощью стартового двигателя, пеленгацию ракеты, формирование программной команды управления на участке траектории полета с работающим разгонным двигателем и передачу программной команды управления на ракету для ее вывода на линию визирования цели ([4] Патент РФ №2205360, МПК7 F 42 В 15/01).
В известном способе при формировании управления воздействие поперечного ветра на полет ракеты также не учитывается и поэтому на определенной дальности, к моменту захвата ракеты пеленгатором для ее пеленгации для последующего управления по отклонению от ЛВЦ, ракета под воздействием поперечного ветра будет иметь линейное отклонение Z и угловой разворот ϕ относительно заданного направления стрельбы. Поэтому появится дополнительная составляющая ветрового рассеивания ракеты, что повышает вероятность ее выхода из информационного луча пеленгатора, снижает точность наведения ракеты в ближней зоне поражения и увеличивает мертвую зону комплекса вооружения.
Задачей предлагаемого изобретения является уменьшение рассеивания, повышение точности встреливания ракеты в поле захвата пеленгатора и повышение точности вывода и наведения ракеты в ближней зоне поражения в условиях ветрового воздействия.
Поставленная задача достигается за счет того, что в способе управления ракетой, включающем запуск ракеты под углом к ЛВЦ, разгон ракеты с помощью стартового двигателя, пеленгацию ракеты, формирование программной команды управления на участке траектории полета с работающим разгонным двигателем и передачу программной команды управления на ракету для ее вывода на ЛВЦ, измеряют поперечную составляющую скорости ветра, формируют направление угла запуска ракеты относительно ЛВЦ в направлении поперечной составляющей скорости ветра, а величину угла запуска ϕ0 определяют из соотношения

где k1 - коэффициент чувствительности линейного отклонения ракеты к поперечной составляющей скорости ветра на дальности начала управления ракетой по отклонению от ЛВЦ;
 - коэффициент чувствительности углового отклонения ракеты к поперечной составляющей скорости ветра на дальности начала управления ракетой по отклонению от ЛВЦ;
- коэффициент чувствительности углового отклонения ракеты к поперечной составляющей скорости ветра на дальности начала управления ракетой по отклонению от ЛВЦ;
k2 - коэффициент чувствительности линейного отклонения ракеты к углу отклонения рулей управления ракеты на дальности начала управления ракетой по отклонению от ЛВЦ;
 - коэффициент чувствительность угла вектора скорости ракеты к углу отклонения рулей управления ракеты на дальности начала управления ракетой по отклонению от ЛВЦ;
- коэффициент чувствительность угла вектора скорости ракеты к углу отклонения рулей управления ракеты на дальности начала управления ракетой по отклонению от ЛВЦ;
Д - дальность начала управления ракетой по отклонению от ЛВЦ;
w - поперечная составляющая скорости ветра,
и с момента запуска ракету на разгонном участке полета разворачивают в направлении поперечной составляющей скорости ветра с помощью рулей управления ракеты, угол отклонения которых формируют пропорционально программной команде управления δ, определяемой по соотношению
В предлагаемом способе управления решение поставленной задачи основывается на взаимосвязанных операциях по формированию направления и угла запуска ракеты относительно ЛВЦ и направления и угла разворота ракеты на разгонном участке путем отклонения ее рулей в соответствии с программной командой управления, определяемых в зависимости от одного и того же измеряемого параметра - поперечной скорости ветра, и направленных на компенсацию на определенной дальности полета взаимосвязанных линейного отклонения траектории ракеты и углового разворота ракеты от заданного направления полета, получаемых от воздействия поперечного ветра на ракету, что и обеспечивает повышение точности встреливания и вывода ракеты на ЛВЦ. Линейное отклонение ракеты, вызванное ветром, парируются введением соответствующей поправки на направление стрельбы путем формирования соответствующего угла запуска ракеты ϕ0 (3), а угловой разворот ракеты на ветровой угол атаки парируется соответствующим разворотом ракеты посредством рулей управления ракеты по команде δ (4) с учетом их взаимосвязанного влияния друг на друга. Взаимосвязанное формирование угла ϕ0 и команды управления δ обеспечивает наиболее полную
компенсацию смещений траектории и углового положения ракеты от заданного направления.
Коэффициенты чувствительности  , входящие в соотношения (3) и (4), численно определяются как частные производные соответствующей функции по соответствующему аргументу при его фиксированном значении (индекс "0"), т.е.
, входящие в соотношения (3) и (4), численно определяются как частные производные соответствующей функции по соответствующему аргументу при его фиксированном значении (индекс "0"), т.е.

где Z - линейное отклонение ракеты;
ϕ - угловое отклонение ракеты;
Θ - угол разворота вектора скорости ракеты (разворот угла наклона касательной к траектории;
w - поперечная составляющая скорости ветра;
u - угол отклонения рулей ракеты.
Например, коэффициент чувствительности k1 определяет зависимость линейного отклонения ракеты от поперечной скорости ветра и может быть равен  и т.д.
и т.д.
Коэффициенты чувствительности определяются предварительно экспериментальным или расчетным путем, например, в соответствии с методикой, изложенной в ([5] Ф.Р.Гантмахер, Л.М.Левин. Теория полета управляемых ракет. - М.: Государственное издательство физико-математической литературы, 1959, стр.84-86, стр.114-116). Коэффициенты чувствительности могут также определены через передаточные коэффициенты ракеты по отношению к углу отклонения рулей и скорости ветра, например,  ([1] A.A.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, стр.104-105, стр.113).
([1] A.A.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, стр.104-105, стр.113).
Таким образом, при действии на ракету поперечного ветра со скоростью w и введения предложенных операций по компенсации его влияния на движение ракеты (формирования угла запуска ракеты ϕ0 путем разворота пусковой установки с ракетой и разворота ракеты посредством рулей на разгонном участке командой управления δ) получим на заданной дальности Д установившиеся суммарные поперечные (боковые) отклонения ракеты от заданного направления стрельбы (ЛВЦ):
- линейное отклонение

- угловое отклонение

Решая совместно уравнения (5) и (6) при условии обеспечения нулевых значений линейного и углового отклонений (т.е. их компенсации на дальности Д)
получим заявляемые соотношения (3) и (4) для формирования взаимосвязанных угла запуска ракеты (разворота пусковой установки с ракетой) относительно ЛВЦ ϕ0 и программной команды управления δ для разворота ракеты посредством рулей на необходимый компенсирующий угол при полете на заданную дальность начала управления по измеренным координатам ракеты.
Отклонения ракеты под воздействием поперечного ветра формируются после схода ракеты на так называемом критическом участке траектории ([5] Ф.Р.Гантмахер, Л.М.Левин. Теория полета управляемых ракет. - М.: Государственное издательство физико-математической литературы, 1959, стр.105-106, 257-260), который представляет собой начальный участок полета, т.е. первые десятки метров по дальности полета, когда скорость разгона ракеты еще соизмерима со скоростью ветра (пока ветровой угол атаки (1) существенно отличен от нуля), а величина располагаемой управляющей перегрузки ракеты еще недостаточна для управления по отклонению. В общем случае скорость ветра представляется состоящей из двух составляющих: постоянной и случайной. На промежутке времени, достаточном для схода ракеты с пусковой установки при запуске и движении ее на критическом участке траектории до дальности встреливания в поле захвата пеленгатора и с учетом реального интегрального масштаба турбулентности переменной атмосферы, градиенты скорости ветра по времени и горизонтальному направлению, связанные со случайной составляющей скорости ветра, оказываются несущественными ([2] А.А.Дмитриевский. Внешняя баллистика. - М.: Машиностроение, 1979, стр.344-345). Поэтому практически формирование управления ракетой достаточно проводить по средней составляющей скорости поперечного ветра, измеренной к моменту запуска ракеты.
Способ управления реализуется, например, системой управления, функциональная схема которой представлена на фиг.1. На фиг.1 обозначено:
ПЦ - пеленгатор цели;
ПР - пеленгатор ракеты;
УПК - устройство передачи команд управления на ракету;
ПУ - пусковая установка с приводом наведения (и ракетой);
ДСх - датчик схода ракеты с пусковой установки;
ДВ - датчик ветра;
СРП - счетно-решающий прибор;
Р - ракета в полете.
Система управления содержит пеленгатор цели 1, пеленгатор ракеты 2, счетно-решающий прибор 3, устройство передачи команд управления на ракету 4, пусковую установку с приводом наведения (с ракетой) 5, датчик схода ракеты с пусковой установки 6, датчик ветра 7 и ракету 8.
Управление ракетой осуществляется следующим образом. Пеленгатор цели 1 сопровождает цель и определяет положение ЛВЦ, координаты которой поступают в счетно-решающий прибор 3 и задают направление стрельбы. Сигнал с датчика ветра 7, пропорциональный измеренной относительно ЛВЦ поперечной составляющей скорости ветра w, также поступает в счетно-решающий прибор 3, где совместным решением соотношений (3) и (4) определяются угол запуска ракеты (угол разворота пусковой установки с ракетой) ϕ0 и команда управления δ на компенсирующий угол отклонения рулей управления ракеты для ее разворота. Сигнал, пропорциональный углу ϕ0, поступает на привод наведения пусковой установки, которая вместе с ракетой разворачивается относительно заданного направления ЛВЦ на необходимый угол ветрового упреждения ϕ0 в направлении ветра. Производится запуск ракеты под углом ϕ0 к ЛВЦ и после схода ракеты по команде, поступающей с датчика схода ракеты 6, в счетно-решающем приборе 3 формируется команда управления δ, пропорциональная необходимому углу разворота рулей ракеты, которая из счетно-решающего прибора 3 поступает в устройство передачи команд 4 и далее на ракету 8. Ракета, отрабатывая полученную команду управления, на разгонном участке полета отклоняет рули управления на угол, обеспечивающий необходимый разворот продольной оси и вектора скорости ракеты в направлении ветра, и тем самым парирует к заданной дальности начала управления Д свои линейное (угловое) отклонение и угловой разворот от ЛВЦ, вызываемые ветровым воздействием на нее. На дальности Д происходит захват ракеты пеленгатором ракеты 2, измерение ее координат, которые поступают в счетно-решающий прибор 3, где далее формируются команды управления ракетой, пропорциональные отклонению ракеты от ЛВЦ.
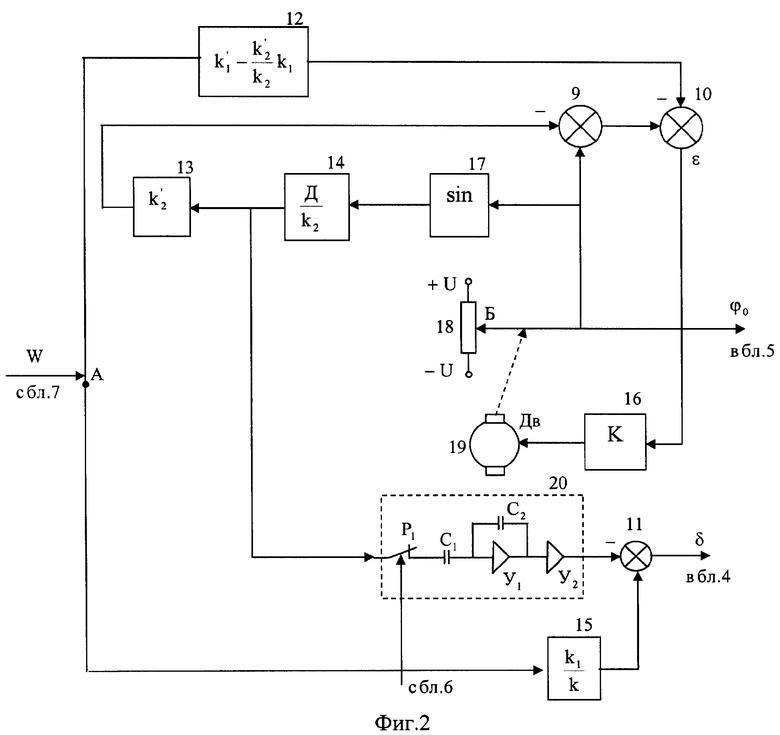
Счетно-решающий прибор 3 включает схему формирования сигналов, пропорциональных углу запуска ракеты (углу разворота пусковой установки с ракетой) ϕ0 и команде управления δ на угол разворота рулей ракеты. Функциональная схема такого блока при аналоговом исполнении представлена на фиг.2. Схема содержит вычитатели 9, 10, 11, усилители 12, 13, 14, 15, 16, блок синуса 17, потенциометр 18, исполнительный двигатель Дв - двигатель постоянного тока 19 и схему запоминания 20. Угол ϕ0 определяется решением уравнения (3), которое осуществляется следящей системой схемы, реализующей уравнение вида

где  - сигнал, пропорциональный значению корня уравнения (3), равного искомому углу запуска ракеты ϕ0
- сигнал, пропорциональный значению корня уравнения (3), равного искомому углу запуска ракеты ϕ0
К - коэффициент усиления схемы.
Значение коэффициента К усилителя 16 в соотношении (8) задается исходя из требуемой точности определения угла ϕ0. Погрешность Δϕ0 определения угла ϕ0 равна ([3] Л.Н.Преснухин, Л.А.Соломонов и др. Основы теории и проектирования вычислительных приборов и машин управления. - М.: Высшая школа, 1970, стр.206-207).

и при достаточно большом значении К (больше 100) является пренебрежимо малой.
Коэффициенты передачи усилителей 12, 13, 14, 15 определяются коэффициентами чувствительности данной ракеты, входящими в соотношения (3), (4), численные значения которых определяются предварительно и заносятся в память счетно-решающего прибора 3.
До запуска ракеты в соответствии со схемой фиг.2 на элементах 9, 10, 12, 13, 14, 16, 17, 18, 19 реализуется решение уравнения (8) для определения угла разворота пусковой установки с ракетой 5. Если сигнал с выхода потенциометра 18, представляющий собой значение искомого угла отворота ϕ0, не соответствует решению уравнения (8), то на выходе вычитателя 10 будет сигнал ошибки ε, отличный от нуля, который после усилителя 16 поступает на исполнительный двигатель 19, который перемещает движок потенциометра 18 до тех пор, пока сигнал ошибки ε не придет в нулевое значение. При этом значение сигнала с выхода потенциометра 18 будет соответствовать решению уравнения (8), т.е. сигналу искомому углу отворота ϕ0. В этом случае значения сигналов угла отворота ϕ0 и измеренной скорости ветра w с датчика ветра 7 будут связаны коэффициентом передачи схемы от точки "А" до точки "Б", определяемым соотношением
где kдв - коэффициент передачи исполнительного двигателя 19.
С выхода усилителя 14 сигнал, пропорциональный sinϕ0, поступает на вход схемы запоминания 20. В момент схода ракеты с пусковой установки по сигналу с датчика схода 6, поступающему на управляющий вход ключа схемы запоминания 20, размыкается его нормально замкнутый контакт и на выходе схемы 20 запоминается сигнал, пропорциональный значению  в момент схода ракеты. По этому запомненному сигналу и сигналу, пропорциональному скорости ветра w, поступающему с датчика ветра 7 на вход усилителя 15, в соответствии с соотношением (4), на выходе вычитателя 11 формируется сигнал, пропорциональный требуемой команде управления δ на отклонение рулей управления ракеты для компенсации ветрового воздействия на разгонном участке полета.
в момент схода ракеты. По этому запомненному сигналу и сигналу, пропорциональному скорости ветра w, поступающему с датчика ветра 7 на вход усилителя 15, в соответствии с соотношением (4), на выходе вычитателя 11 формируется сигнал, пропорциональный требуемой команде управления δ на отклонение рулей управления ракеты для компенсации ветрового воздействия на разгонном участке полета.
Для современных ракет в условиях стрельбы при ветре величина угла запуска ракеты ϕ0 для компенсации ветрового сноса, как правило, не превышает 3-5 град. Поэтому с погрешностью, не превышающей 3%, можно считать, что численно sinϕ0≈ϕ0 и тогда соотношение (3) для угла запуска (угла разворота пусковой установки) запишется в виде
откуда получается соотношение для определения компенсирующего угла разворота пусковой установки в виде
где аw - коэффициент, равный  .
.
Тогда, с учетом (13), соотношение (4) для команды управления на разворот ракеты δ посредством отклонения рулей ракеты примет вид
где Кw - коэффициент, равный  .
.
Таким образом, управление ракетой с взаимосвязанным формированием угла запуска ракеты ϕ0 и команды управления δ углом разворота ракеты посредством отклонения ее рулей управления на разгонном участке в зависимости от поперечной скорости ветра обеспечивает компенсацию линейного смещения траектории и углового разворота ракеты от заданного направления стрельбы при воздействии поперечного ветра.
Предлагаемый способ управления ракетой позволяет уменьшить ветровое рассеивание ракеты, повысить точность ее встреливания в поле захвата пеленгатора, повысить точность наведения ракеты в ближней зоне поражения и уменьшить мертвую зону ракетного комплекса вооружения, что выгодно отличает его от известных.
Источники информации
1. А.А.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965.
2. А.А.Дмитриевский. Внешняя баллистика. - М.: Машиностроение, 1979.
3. Л.Н.Преснухин, Л.А.Соломонов и др. Основы теории и проектирования вычислительных приборов и машин управления. - М.: Высшая школа, 1970.
4. Патент РФ №2205360, МПК7 F 42 B 15/01.
5. Ф.Р.Гантмахер, Л.М.Левин. Теория полета управляемых ракет. - М.: Государственное издательство физико-математической литературы, 1959.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2406067C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2011 |
|
RU2466345C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2263874C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 1997 |
|
RU2122700C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
Изобретение относится к ракетной технике и может быть использовано в комплексах вооружения телеуправляемых ракет. Технический результат - уменьшение рассеивания ракеты и повышение точности вывода ее на линию визирования цели при боковом ветре. Способ управления ракетой включает запуск ракеты под углом к линии визирования цели, разгон ракеты с помощью стартового двигателя и формирование программной команды управления для вывода ракеты на линию визирования цели. Новым в способе управления является то, что формируют направление угла запуска ракеты в направлении поперечной составляющей скорости ветра, а величину угла запуска ϕ0 определяют из первого математического выражения и с момента запуска ракету на разгонном участке полета разворачивают в направлении поперечной составляющей скорости ветра с помощью рулей управления ракеты, угол отклонения которых формируют пропорционально программной команде, определяемой по второму математическому выражению. 2 ил.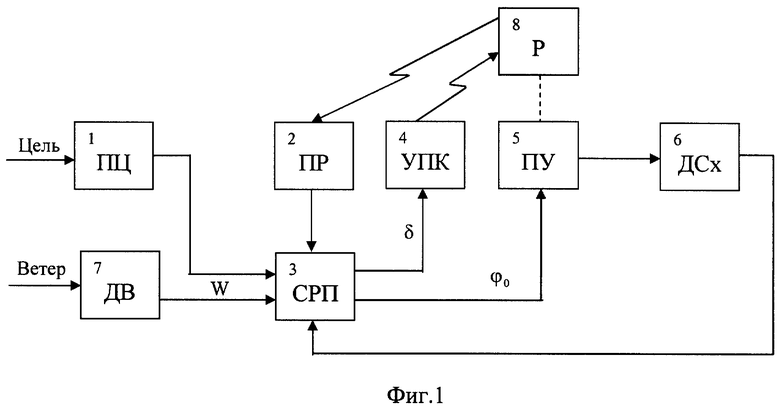
Способ управления ракетой, включающий запуск ракеты под углом к линии визирования цели, разгон ракеты с помощью стартового двигателя, пеленгацию ракеты, формирование программной команды управления на участке траектории полета с работающим разгонным двигателем и передачу программной команды управления на ракету для ее вывода на линию визирования цели, отличающийся тем, что измеряют поперечную составляющую скорости ветра, формируют направление угла запуска ракеты относительно линии визирования цели в направлении поперечной составляющей скорости ветра, а величину угла запуска ϕ0 определяют из соотношения
где k1 - коэффициент чувствительности линейного отклонения ракеты к поперечной составляющей скорости ветра на дальности начала управления ракетой по отклонению от линии визирования цели;
 - коэффициент чувствительности углового отклонения ракеты к поперечной составляющей скорости ветра на дальности начала управления ракетой по отклонению от линии визирования цели;
- коэффициент чувствительности углового отклонения ракеты к поперечной составляющей скорости ветра на дальности начала управления ракетой по отклонению от линии визирования цели;
k2 - коэффициент чувствительности линейного отклонения ракеты к углу отклонения рулей управления ракеты на дальности начала управления ракетой по отклонению от линии визирования цели;
 - коэффициент чувствительности угла вектора скорости ракеты к углу отклонения рулей управления ракеты на дальности начала управления ракетой по отклонению от линии визирования цели;
- коэффициент чувствительности угла вектора скорости ракеты к углу отклонения рулей управления ракеты на дальности начала управления ракетой по отклонению от линии визирования цели;
Д - дальность начала управления ракетой по отклонению от линии визирования цели;
w - поперечная составляющая скорости ветра,
и с момента запуска ракету на разгонном участке полета разворачивают в направлении поперечной составляющей скорости ветра с помощью рулей управления ракеты, угол отклонения которых формируют пропорционально программной команде управления δ, определяемой по соотношению
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ И СТРЕЛЯЮЩИЙ КОМПЛЕКС | 1999 |
|
RU2148779C1 |
| Опорная часть строительной конструкции (варианты) | 2017 |
|
RU2655721C1 |
| US 5042742 A, 27.08.1991. | |||

