Изобретение относится к ракетной технике и может быть использовано в комплексах вооружения телеуправляемых ракет.
Известен способ управления ракетой, включающий запуск ракеты, разгон ракеты с помощью стартового двигателя, определение отклонения ракеты от расчетной траектории полета, формирование команды управления, пропорциональной отклонению ракеты от требуемой траектории, и передачу команды управления на ракету для наведения ее на цель ([1] A.A.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, стр.327-330).
Управление ракетой на разгонном участке сопровождается дымообразованием от собственного стартового двигателя, что в случае использования системы телеуправления с визированием цели и (или) ракеты оптическими и оптико-электронными пеленгаторами на этапе управления, связанным с выводом ракеты на линию визирования цели (ЛВЦ), затрудняет слежение за целью, ослабляет сигналы по линии связи «носитель - ракета», снижает помехоустойчивость оптико-электронной системы управления и может привести к срыву управления ракетой.
Известные способы управления ракетой, позволяющие повысить помехоустойчивость оптических линий связи в условиях дымообразования собственного двигателя, основываются на разнесении в пространстве траектории активного участка полета ракеты с ЛВЦ.
Наиболее близким к предлагаемому способу является способ управления ракетой, включающий запуск ракеты под углом к ЛВЦ с последующим совмещением с ней по программной траектории вывода, разгон ракеты с помощью стартового двигателя, формирование программной команды управления ракетой на участке траектории полета с работающим двигателем и передачу программной команды на ракету ([2] Патент РФ №2205360, Способ управления ракетой).
Известный способ управления ракетой обеспечивает вывод ракеты на ЛВЦ, однако обладает и недостатками, связанными с тем, что при формировании управления выводом ракеты не учитывается влияние на ее полет ветра и перемещение ЛВЦ, что приводит к снижению динамической точности вывода ракеты на ЛВЦ, так как при этом
- увеличивается угол подхода ракеты к ЛВЦ;
- увеличиваются отклонения ракеты относительно ЛВЦ;
- процесс вывода ракеты носит колебательный характер;
- увеличиваются время вывода и дальность ближней границы зоны поражения;
- снижается помехоустойчивость оптико-электронных пеленгаторов к пыледымовым помехам, создаваемым собственным выстрелом.
Эти недостатки обусловлены следующим. В данном способе угол запуска ракеты и программная команда управления ракетой выбираются с таким расчетом, чтобы в процессе вывода обеспечивалось неэкранирование линий визирования цели и ракеты пыледымовыми помехами, создаваемыми при старте и разгоне ракеты, например, по критерию превышения ожидаемого угла между продольной осью ракеты и линией визирования ракеты над ожидаемым угловым размером дымового шлейфа от разгонного двигателя ракеты. Ракета, запускаемая под углом относительно ЛВЦ, под действием программной команды управления искривляет свою траекторию и разворачивает продольную ось и вектор скорости к ЛВЦ, тем самым создаются благоприятные, с точки зрения видимости, условия захвата ракеты на сопровождение пеленгатором. Заранее сформированная величина команды вывода при рассеивании ракеты, вызванном условиями стрельбы (в том числе движением ЛВЦ и поперечным ветром), приводит к такому угловому положению ракеты, величина которого может оказаться недостаточной для создания условий захвата ракеты пеленгатором и обеспечения помехоустойчивости каналов визирования цели при пыледымовых помехах, создаваемых собственным выстрелом, или наоборот, быть избыточной величиной, которая впоследствии приведет к увеличению угла подхода ракеты к ЛВЦ.
Так как под воздействием поперечного ветра ракета разворачивается на ветер, то с учетом направления ее запуска относительно ЛВЦ ракета при ветровом возмущении развернется тоже к ЛВЦ. Совместное воздействие на ракету программной команды управления и поперечного ветра приводит к моменту захвата ракеты на сопровождение (к началу управления в замкнутом контуре) к линейному отклонению и угловому развороту ракеты, которые будут определять кривизну траектории и угол подхода ракеты к ЛВЦ.
Сформированная таким образом величина угла запуска ракеты не является необходимой для обеспечения помехоустойчивости линии визирования ракеты и цели при пыледымовых помехах собственного выстрела, так как поперечный ветер способствует сносу этой помехи, а движение ЛВЦ уводит ее из области пыледымообразования. Вместе с тем сформировавшийся при этом угол подхода ракеты к ЛВЦ вызовет отклонения ракеты в процессе дальнейшего вывода, отработка которых приводит к колебательному процессу регулирования ракеты относительно ЛВЦ.
При различных сочетаниях направлений движения ЛВЦ и поперечного ветра в диапазонах возможных величин их скоростей для исключения возможного экранирования линии визирования цели и ракеты дымовым шлейфом собственного двигателя требуется формировать большие величины угла запуска ракеты и команды управления. Это приводит к тому, что в условиях ограниченной располагаемой перегрузки ракета не отрабатывает в заданное время начальное рассогласование, что увеличивает время вывода, дальность ближней границы зоны поражения, а также требует увеличения поля управления пеленгатора ракеты.
Задачей предлагаемого изобретения является повышение динамической точности, уменьшение времени вывода ракеты на ЛВЦ и повышение помехоустойчивости оптических линий визирования цели и ракеты при пыледымовых помехах, создаваемых собственным выстрелом ракеты.
Поставленная задача достигается за счет того, что в способе управления ракетой, включающем запуск ракеты под углом к ЛВЦ с последующим совмещением с ней по программной траектории вывода, разгон ракеты с помощью стартового двигателя, формирование программной команды для управления ракетой на участке траектории полета с работающим двигателем и передачу программной команды управления на ракету, новым является то, что в текущем времени формируют весовую функцию как сумму модуля средней поперечной скорости ветра и модуля угловой скорости ЛВЦ и в момент запуска ракеты корректируют величину угла запуска ракеты, программную траекторию вывода и программную команду управления ракетой пропорционально значению весовой функции, причем в наклонной плоскости управления ракетой направление угла запуска ракеты, направление программной траектории вывода относительно ЛВЦ и знак программной команды определяют с учетом средней поперечной скорости ветра и угловой скорости ЛВЦ.
В предлагаемом способе управления решение поставленной задачи основывается на целенаправленной и взаимосвязанной коррекции величин и направлений угла запуска ракеты относительно ЛВЦ, программной команды управления и программной траектории вывода ракеты на ЛВЦ в зависимости от поперечной скорости ветра и угловой скорости ЛВЦ с целью повышения точности встреливания и минимизации взаимосвязанных линейного отклонения ракеты и углового разворота ракеты от заданного направления выстрела и отклонений ракеты от ЛВЦ в процессе ее вывода.
Управление ракетой осуществляют следующим образом. Рассматривается работа канала управления в наклонной плоскости. Производят слежение за целью и определяют ее текущие угловую координату βц и угловую скорость ЛВЦ  . Далее формируют угол запуска ракеты относительно ЛВЦ β0, программную команду управления К0 и программную траекторию вывода Fп(t) для плавного совмещения ракеты с ЛВЦ в виде функции времени управления ракетой, например, в виде, определяемом соотношением
. Далее формируют угол запуска ракеты относительно ЛВЦ β0, программную команду управления К0 и программную траекторию вывода Fп(t) для плавного совмещения ракеты с ЛВЦ в виде функции времени управления ракетой, например, в виде, определяемом соотношением
где F0 - начальная, на момент начала управления по отклонению, координата программной траектории;
Т - длительность программной траектории вывода;
tну - время начала управления ракетой по отклонению;
t - текущее время.
Одновременно проводят измерение текущей поперечной (относительно ЛВЦ) скорости ветра Wn и проводят для исключения пульсаций, вызванных порывами ветра, ее сглаживание для получения среднего значения  .
.
По полученным текущим значениям скорости ЛВЦ и средней поперечной скорости ветра формируют весовую функцию g(t) в соответствии с соотношением

где k1 и k2 - весовые коэффициенты;
 - модуль среднего значения поперечной скорости ветра;
- модуль среднего значения поперечной скорости ветра;
 - модуль угловой скорости движения ЛВЦ.
- модуль угловой скорости движения ЛВЦ.
Весовые коэффициенты k1 и k2 определяются условиями применения данной ракеты, а именно максимальными значениями средней скорости ветра  и угловой скоростью ЛВЦ
и угловой скоростью ЛВЦ  при которых возможна стрельба данной ракетой, и задают соотношениями
при которых возможна стрельба данной ракетой, и задают соотношениями
Далее формируют функцию f(t), определяющую до схода ракеты текущие направление ее угла запуска, направление программной траектории вывода относительно ЛВЦ и знак программной команды управления, например, по соотношению

где - среднее значение поперечной скорости ветра;
Др - заданная дальность вывода ракеты на ЛВЦ;
sign[.] - функция знака.
В момент запуска ракеты tcx запоминают значение весовой функции g(tcx), значение функции, определяющей направление запуска ракеты f(tcx), и корректируют угол запуска ракеты, программную траекторию вывода и программную команду управления в соответствии с соотношениями



где В - скорректированный угол запуска ракеты,
F(t) - скорректированная программная траектория вывода ракеты на ЛВЦ,
К - скорректированная программная команда управления ракетой.
Затем производят запуск ракеты под скорректированным углом В и на разгонном участке полета передают на ракету скорректированную программную команду управления ракетой К. Ракета искривляет свою траекторию и разворачивает продольную ось так, чтобы к моменту захвата ее на сопровождение tну она встрелилась на программную траекторию вывода с скорректированной начальной координатой F(tну). Этим обеспечиваются благоприятная угловая ориентация ракеты с точки зрения возможности ее пеленгации в условиях собственных дымовых помех и минимальные отклонения ракеты относительно ЛВЦ.
После захвата ракеты на сопровождение при t>tну измеряют ее угловую координату, формируют линейные отклонения ракеты относительно программной траектории вывода F(t) и затем по ним формируют команды управления ракетой в замкнутом контуре с учетом углового положения ЛВЦ.
Таким образом, управление ракетой с учетом скорректированных угла пуска В, программной траектории вывода ракеты на ЛВЦ F(t) и программной команды управления ракетой К обеспечивают уменьшение угла подхода ракеты к ЛВЦ, уменьшение отклонений ракеты относительно ЛВЦ, что приводит к снижению колебательности ракеты в процессе вывода на ЛВЦ, к уменьшению времени вывода ракеты и дальности ближней границы зоны поражения при обеспечении помехоустойчивости линий визирования цели и ракеты в условиях собственных дымовых помех.
Способ управления ракетой реализуется, например, системой, функциональная схема которой представлена на чертеже.
Система управления содержит пеленгатор цели (ПЦ) 1, контур управления ракетой, включающий последовательно соединенные пеленгатор ракеты (ПР) 2, формирователь линейного отклонения ракеты (ФЛО) 3, формирователь команд управления (ФК) 4, сумматор (С) 5, передатчик команд на ракету (ПК) 6 и ракету (Р) 7, а также датчик ветра (ДВ) 8, сглаживающий фильтр (СФ) 9, формирователь программной траектории (ФТ) 10, формирователь программной команды (ФП) 11, формирователь угла запуска (ФУ) 12, формирователь весовой функции (ФВ) 13, блоки умножения 14, 15 и 16 и пусковую установку (ПУ) 17.
Составляющие элементы системы - пеленгатор цели 1, пеленгатор ракеты 2, формирователь линейного отклонения ракеты 3, формирователь команд управления 4, передатчик команд на ракету 6, датчик ветра 8, пусковая установка 17 представляют собой известные штатные элементы системы управления ракетой ([1], стр.366-372). Формирователь весовой функции 13 ([3], И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987, стр.23, 144, 232), формирователь программной траектории 10 ([3], стр.222-223), формирователь программной команды 11 ([3], стр.22), формирователь угла запуска 12 ([3], стр.23), сглаживающий фильтр 9 ([3], стр.73), блоки умножения 14, 15 и 16 ([3], стр.23) и сумматор 5 ([3], стр.22) могут быть выполнены в виде счетно-решающих схем, например, на базе операционных усилителей.
Управление ракетой осуществляется следующим образом. Пеленгатор цели 1 сопровождает цель, измеряет угловую координату цели и передает ее на первый вход формирователя линейных отклонений 3, а также определяет угловую скорость ЛВЦ, которая поступает на второй вход формирователя весовой функции 13, на первый вход которого поступает усредненный сглаживающим фильтром 9 сигнал с датчика ветра 8.
В блоках 10, 11 и 12 формируются соответственно программная траектория вывода Fп(t) (1), программная команда управления К0 и угол запуска ракеты β0, которые поступают на первые входы блоков умножения 14, 15 и 16 соответственно. В блоке 13 формируются текущие значения весовой функции g(t) и функции направления f(t) соответственно по соотношениям (1) и (3). В момент запуска ракеты tcx запоминаются значения весовой функции g(tcx) и функции направления f(tcx), которые затем поступают на вторые входы блоков умножения 14, 15 и 16, где в соответствии с соотношениями (6), (7) и (5) происходит корректировка программной траектории вывода, программной команды управления и угла запуска ракеты. С выхода блока 14 программная траектория вывода F(t) поступает на третий вход формирователя линейных отклонений 3, где с ее учетом далее формируется линейное отклонение ракеты. С выхода блока 16 скорректированный угол запуска В поступает на пусковую установку 17, которая запускает ракету в заданном направлении. Скорректированная программная команда управления К с блока 15 поступает на второй вход сумматора 5. После захвата ракеты на сопровождение пеленгатор ракеты 2 измеряет координаты ракеты, которые поступают на второй вход формирователя линейных отклонений 3. Сигнал с формирователя линейных отклонений 3 поступает на формирователь команд управления ракетой 4, а далее на первый вход сумматора 5 и затем посредством блока 6 передается на ракету 7.
Таким образом, проведенная корректировка обеспечивает уменьшение угла подхода ракеты к ЛВЦ, уменьшение отклонений ракеты относительно ЛВЦ, как следствие - снижение колебательности в процессе вывода ракеты на ЛВЦ, уменьшение времени вывода ракеты и дальности ближней границы зоны поражения при обеспечении помехоустойчивости линий визирования цели и ракеты в условиях собственных дымовых помех.
Предлагаемый способ управления ракетой позволяет повысить динамическую точность системы управления и эффективность комплексов вооружения телеуправляемых ракет, что выгодно отличает его от известных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2011 |
|
RU2466345C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280232C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2263874C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 1997 |
|
RU2122700C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280227C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
Изобретение относится к ракетной технике и может быть использовано в комплексах вооружения телеуправляемых ракет. Технический результат - уменьшение отклонений ракеты относительно линии визирования цели и времени вывода ракеты в границы зоны поражения при обеспечении помехоустойчивости линий визирования цели и ракеты в условиях дымовых помех, создаваемых собственным выстрелом. Способ управления включает запуск ракеты под углом к линии визирования цели с последующим совмещением с ней по программной траектории вывода, разгон ракеты с помощью стартового двигателя, формирование программной команды управления ракетой на участке траектории полета с работающим двигателем и передачу программной команды на ракету. Новым является то, что в текущем времени формируют весовую функцию как функцию линейной комбинации модуля средней поперечной скорости ветра и модуля угловой скорости линии визирования цели. В момент запуска ракеты корректируют величину угла запуска ракеты, программную траекторию вывода и программную команду управления ракетой пропорционально значению весовой функции. Причем в наклонной плоскости управления ракетой направление угла запуска ракеты, направление программной траектории вывода относительно линии визирования цели и знак программной команды определяют в момент запуска ракеты с учетом средней поперечной скорости ветра и угловой скорости линии визирования цели. 1 ил.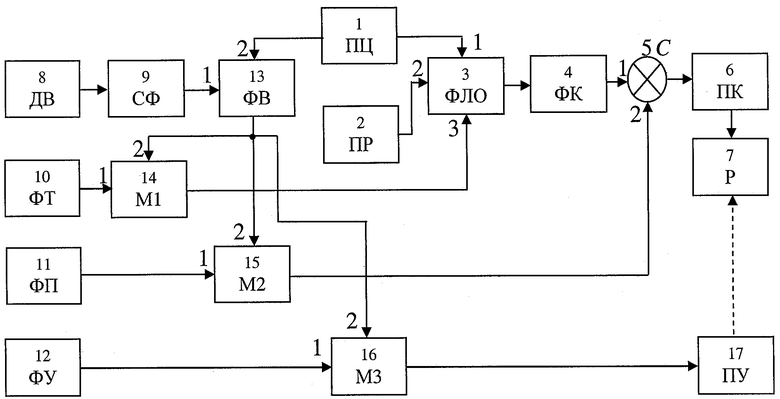
Способ управления ракетой, включающий запуск ракеты под углом к линии визирования цели (ЛВЦ) с последующим совмещением с ней по программной траектории вывода, разгон ракеты с помощью стартового двигателя, формирование программной команды для управления ракетой на участке траектории полета с работающим двигателем и передачу программной команды на ракету, отличающийся тем, что дополнительно в текущем времени формируют весовую функцию как сумму модуля средней поперечной скорости ветра и модуля угловой скорости ЛВЦ и в момент запуска ракеты корректируют величину угла запуска ракеты, программную траекторию вывода и программную команду управления ракетой пропорционально значению весовой функции, причем в наклонной плоскости управления ракетой направление угла запуска ракеты, направление программной траектории вывода относительно линии визирования цели и знак программной команды определяют с учетом средней поперечной скорости ветра и угловой скорости ЛВЦ.
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ И СТРЕЛЯЮЩИЙ КОМПЛЕКС | 1999 |
|
RU2148779C1 |
| Опорная часть строительной конструкции (варианты) | 2017 |
|
RU2655721C1 |
| US 5042742 A, 27.08.1991. | |||

