Изобретение относится к ракетной технике и может быть использовано в комплексах вооружения телеуправляемых ракет.
Наведение управляемых ракет сопровождается дымообразованием двигателей на разгонном участке, что в случае использования командной системы наведения ([1] , стр. 29-31) с визированием цели и ракеты оптическими средствами на первом этапе наведения, связанном с выводом ракеты на кинематическую траекторию ([2] , стр. 329), затрудняет слежение за целью и снижает помехоустойчивость оптической линии связи (ОЛС) носитель - ракета.
Известны различные способы наведения ракет в условиях дымообразования собственных двигателей, позволяющие повысить помехоустойчивость ОЛС носитель - ракета. Один из них - стрельба под углом к линии визирования цели (ЛВЦ) с формированием программной команды управления на участке траектории полета с работающим двигателем и передачей команды по проводной линии связи для вывода ракеты на ЛВЦ и дальнейшей коррекции полета ракеты с помощью дистанционного управления при нахождении ракеты на ЛВЦ, реализованный, например, в противотанковом комплексе "SWINGFIRE" ([3], стр. 509-513, [4], стр. 28-29).
Известна система наведения телеуправляемой ракеты, реализующая вышеописанный способ и состоящая из пеленгатора цели и контура управления ракетой, включающего в каждом канале тангажа и курса блок формирования программной команды, последовательно соединенные пеленгатор ракеты, блок формирования команды управления, второй вход которого соединен с соответствующим выходом пеленгатора цели, управляемый коммутатор, второй вход которого подключен к выходу блока формирования программной команды, а информационный вход - ко второму выходу пеленгатора ракеты, устройство передачи команд управления на ракету и ракету.
Известный способ наведения телеуправляемой ракеты и система наведения, его реализующая, вследствие использования проводной линии связи и программной команды управления на участке траектории полета с работающим двигателем, которая должна учитывать разброс времени работы двигателя ракеты в интервале температур ее боевого применения, уход параметров за время хранения ракет в условиях войсковой эксплуатации, скорость и маневренность цели, ограничены применением в комплексах вооружения.
Наиболее близким к предлагаемому является способ наведения телеуправляемой ракеты, реализованный в зенитном комплексе "ADATS" ([1], стр. 62-64), включающий формирование широкого и узкого полей управления, запуск ракеты под углом к ЛВЦ, разгон ракеты с помощью двигателя в течение времени tp, наведение ракеты в широком поле управления в течение времени tp с формированием команды управления, пропорциональной угловому рассогласованию между факелом двигателя ракеты и ЛВЦ, наведение ракеты в узком поле управления с формированием команды управления, пропорциональной угловому рассогласованию между источником излучения на ракете и ЛВЦ.
В данном способе на участке наведения с работающим двигателем реализуется командная система телеуправления. Пеленгатор ракеты определяет угловое отклонение ракеты относительно ЛВЦ по факелу работающего двигателя, и на основе этого рассогласования наземная аппаратура комплекса формирует команду, передающуюся на борт ракеты с помощью временной модуляции луча. При передаче команды энергия лазерного луча концентрируется в узком луче, обеспечивающем передачу информации сквозь факел двигателя и прием излучения детекторами, размещенными на концах крыльев ракеты.
После окончания работы разгонного двигателя реализуется система телеориентирования ракеты в лазерном луче. Два детектора, расположенные в хвостовой части ракеты, принимают лазерное излучение. Бортовая аппаратура ракеты преобразует эти сигналы в команды управления рулями, которые удерживают ракету в центре луча до встречи с целью.
Наиболее близкой к предлагаемой является система наведения телеуправляемой ракеты ([1] , стр. 62-64), реализующая известный способ наведения и состоящая из пеленгатора цели и контура управления ракетой, содержащего в каждом канале тангажа и курса пеленгатор ракеты с узким полем управления, последовательно соединенные пеленгатор ракеты с широким полем управления, управляемый коммутатор, второй вход которого соединен с первым выходом, а информационный вход - со вторым выходом пеленгатора ракеты с узким полем управления, блок формирования команды управления, пропорциональной угловому рассогласованию между ракетой и линией визирования цели, второй вход которого соединен с соответствующим выходом пеленгатора цели, устройство передачи команд управления и ракету.
Известный способ наведения телеуправляемой ракеты и система наведения, его реализующая, вследствие исключения проводной линии связи позволяют увеличить дальность поражения цели, учет наличия бокового ветра, скорости и маневренности цели - повысить точность наведения ракеты на цель. Вместе с тем известные способ наведения ракеты и система, его реализующая, обладают недостатком, сводящимся к срыву наведения ракеты на участке полета с работающим двигателем из-за возможного в условиях реального полета перекрывания ОЛС носитель - ракета, геометрически совпадающей с линией визирования ракеты, дымовым шлейфом факела собственного двигателя ракеты.
Схема, поясняющая условие перекрывания ОЛС носитель - ракета дымовым шлейфом факела двигателя ракеты, приведена на фиг. 1, где угловой размер дымового шлейфа факела двигателя ракеты относительно его продольной оси обозначен через χ, а угол между продольной осью дымового шлейфа и линией визирования ракеты - через ζ. Из фиг.1 видно, что отсутствие перекрывания ОЛС носитель - ракета дымовым шлейфом факела собственного двигателя ракеты имеет место, если
χ<ζ. (1)
Угол запуска ракеты относительно ЛВЦ выбирается с таким расчетом, чтобы в процессе вывода ракеты на ЛВЦ обеспечить превышение угла ζ над угловым размером дымового шлейфа факела двигателя χ. Стрельба управляемыми ракетами сопровождается рассеиванием траекторий, связанным с действием на ракету случайных возмущений и с ошибками ее наведения на цель ([1], стр. 137-138), и в процессе наведения может оказаться, что условие (1) не выполняется. В этом случае ОЛС носитель - ракета будет перекрыта дымовым шлейфом факела двигателя, а наведение ракеты сорвано.
Задачей предлагаемого изобретения является предотвращение перекрывания ОЛС носитель - ракета дымовым шлейфом факела двигателя ракеты и срыва наведения ракеты в широком поле управления.
Поставленная задача достигается за счет того, что в способе наведения телеуправляемой ракеты, включающем формирование широкого и узкого полей управления, запуск ракеты под углом к ЛВЦ, разгон ракеты с помощью двигателя в течение времени tp, наведение ракеты в широком поле управления в течение времени tp с формированием команды управления, пропорциональной угловому рассогласованию между факелом двигателя ракеты и ЛВЦ, наведение ракеты в узком поле управления с формированием команды управления, пропорциональной угловому рассогласованию между источником излучения ракеты и ЛВЦ, при наведении ракеты в широком поле управления формируют опорный сигнал, измеряют текущую угловую скорость ракеты относительно ЛВЦ, на ее основе формируют сигнал, пропорциональный угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования, сравнивают полученный сигнал с опорным сигналом, и в случае, если сигнал, пропорциональный угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования, меньше опорного, формируют пропорциональную текущей угловой скорости ракеты относительно ЛВЦ корректирующую команду управления и далее наведение ракеты осуществляют с учетом этой корректирующей команды.
Поставленная задача достигается за счет того, что в систему наведения телеуправляемой ракеты, состоящую из пеленгатора цели и контура управления ракетой, содержащего в каждом канале тангажа и курса пеленгатор ракеты с узким полем управления, последовательно соединенные пеленгатор ракеты с широким полем управления, управляемый коммутатор, второй вход которого соединен с первым выходом, а информационный вход - со вторым выходом пеленгатора ракеты с узким полем управления, и блок формирования команды управления, пропорциональной угловому рассогласованию между ракетой и ЛВЦ, второй вход которого соединен с соответствующим выходом пеленгатора цели, последовательно соединенные устройство передачи команд управления и ракету, введены блок формирования опорного сигнала, последовательно соединенные блок формирования сигнала, пропорционального угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования, вход которого соединен со вторым выходом пеленгатора ракеты с широким полем управления, блок сравнения, второй вход которого подключен к выходу блока формирования опорного сигнала, последовательно соединенные управляемый ключ, вход которого соединен со вторым выходом пеленгатора ракеты с широким полем управления, а информационный вход - с выходом блока сравнения, блок формирования корректирующей команды управления и сумматор, второй вход которого подключен к выходу блока формирования команды управления, пропорциональной угловому рассогласованию между ракетой и ЛВЦ, а выход соединен с входом устройства передачи команд управления. В данном способе наведения и системе для его реализации решение задачи основывается на сочетании операций теленаведения ракеты и дополнительных операций по управлению ракетой на разгонном участке ее движения с формированием корректирующей команды, пропорциональной измеренной текущей угловой скорости ракеты относительно ЛВЦ, которая учитывает угловую ориентацию ракеты и ее дымового шлейфа в пространстве. Наличие корректирующей команды позволяет обеспечить выполнение условия (1) и исключить перекрывание ОЛС носитель - ракета дымовым шлейфом факела собственного двигателя ракеты.
Сравнение заявляемых технических решений с известными позволило установить соответствие их критерию "новизна". При изучении других известных технических решений в данной области техники признаки, отличающие заявляемое изобретение от прототипа, не были выявлены и поэтому они обеспечивают заявляемым техническим решениям соответствие критерию "изобретательский уровень".
В соответствии с фиг.1 кинематические уравнения, характеризующие геометрию движения ракеты относительно ЛВЦ, имеют следующий вид ([2], стр. 336):
где r - дальность до ракеты;
V - скорость ракеты;
ϕ - угол между ОЛС носитель - ракета и ЛВЦ; угловая скорость ракеты относительно ЛВЦ;
угловая скорость ракеты относительно ЛВЦ;
η - угол разворота вектора скорости ракеты относительно ее линии визирования;
α - угол атаки.
Из системы (2) угол ζ при малых углах атаки α (что обеспечивается выбранным методом наведения) равен
Таким образом, измеряя текущую угловую скорость ракеты относительно ЛВЦ  при известных скорости ракеты V и дальности до ракеты r (например, программных), в соответствии с (3) формируется сигнал ζ, пропорциональный угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования, полученный сигнал ζ сравнивается с опорным сигналом ζоп, величина которого выбирается с учетом возможного угла атаки α и обеспечивает для конкретных летно-баллистических характеристик ракеты выполнение условия (1) и если
при известных скорости ракеты V и дальности до ракеты r (например, программных), в соответствии с (3) формируется сигнал ζ, пропорциональный угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования, полученный сигнал ζ сравнивается с опорным сигналом ζоп, величина которого выбирается с учетом возможного угла атаки α и обеспечивает для конкретных летно-баллистических характеристик ракеты выполнение условия (1) и если
ζ<ζоп, (4)
то формируется корректирующая команда управления, пропорциональная текущей угловой скорости ракеты относительно ЛВЦ ([2], стр. 394)
где F(t) - известная функция, определяемая летно-баллистическими характеристиками ракеты;
K0 - передаточный коэффициент (выбирается при проектировании из условия обеспечения устойчивости контура управления ракетой).
Далее наведение ракеты осуществляется с учетом корректирующей команды, позволяющей обеспечить выполнение условия (1), что исключает перекрывание ОЛС носитель - ракета дымовым шлейфом факела собственного двигателя ракеты и срыв наведения ракеты.
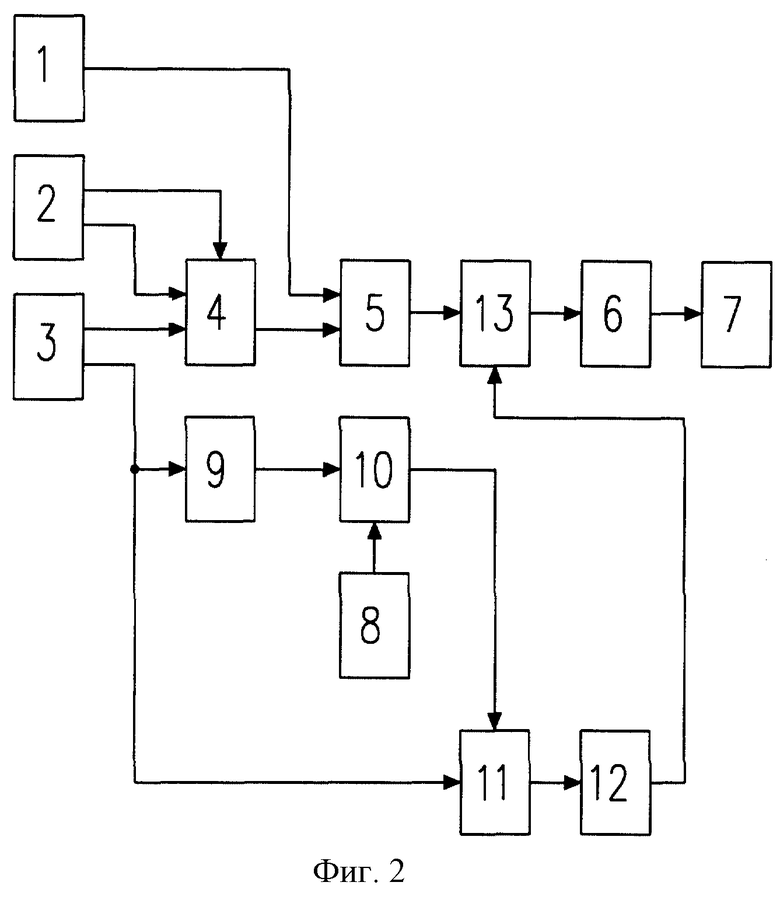
Функциональная схема системы наведения, реализующей способ наведения телеуправляемой ракеты, приведена на фиг. 2.
Система наведения телеуправляемой ракеты состоит из пеленгатора цели 1 и контура управления ракетой, содержащего в каждом канале тангажа и курса пеленгатор ракеты с узким полем управления 2, последовательно соединенные пеленгатор ракеты с широким полем управления 3, управляемый коммутатор 4, второй вход которого соединен с первым выходом, а информационный вход - со вторым выходом пеленгатора ракеты с узким полем управления 2, и блок формирования команды управления 5, пропорциональной угловому рассогласованию между ракетой и ЛВЦ, второй вход которого соединен с соответствующим выходом пеленгатора цели 1, последовательно соединенные устройство передачи команд управления 6 и ракету 7, а также блок формирования опорного сигнала 8, последовательно соединенные блок формирования сигнала, пропорционального угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования 9, вход которого подключен ко второму выходу пеленгатора ракеты с широким полем управления 3, блок сравнения 10, второй вход которого подключен к выходу блока формирования опорного сигнала 8, последовательно соединенные управляемый ключ 11, вход которого соединен со вторым выходом пеленгатора ракеты с широким полем управления 3, а информационный вход - с выходом блока сравнения 10, блок формирования корректирующей команды управления 12 и сумматор 13, второй вход которого подключен к выходу блока формирования команды управления 5, а выход соединен с входом устройства передачи команд управления 6.
Составляющие элементы системы - пеленгатор цели 1, пеленгаторы ракеты 2 и 3, устройство передачи команд управления 6 представляют собой известные штатные элементы систем наведения ракет ([5], стр. 335).
Блок формирования команды управления, пропорциональной угловому рассогласованию между ракетой и ЛВЦ 5, также является известным устройством системы наведения телеуправляемых ракет и может быть выполнен на аналоговых счетно-решающих элементах ([2], стр. 371, 394).
Элементы - блок сравнения 10 и сумматор 13 могут быть выполнены, например, на базе операционных усилителей ([5], стр. 42, 232).
Управляемый коммутатор 4 и управляемый ключ 11 реализуются, например, на базе электронных ключей ([7], стр. 378).
Блок формирования сигнала, пропорционального угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования 9, и блок формирования корректирующей команды управления 12 могут быть выполнены, например, в виде решающих схем [6] на базе операционных усилителей, реализующих соответственно соотношению (3) и (5).
Сигналы с выхода блока формирования опорного сигнала 8 могут задаваться, например, напряжением с блока питания, которое масштабируется операционным усилителем.
Система наведения ракеты работает следующим образом (рассматривается работа одного канала наведения, например, в угломестной плоскости). Пеленгатор цели 1 осуществляет ее сопровождение и измерение угловой координаты цели ϕц. После запуска ракеты 7, вначале пеленгатор ракеты с широким полем управления 3 (в течение времени tp), а затем - с узким полем управления 2 осуществляют ее сопровождение и измерение угловых координат полета ракеты соответственно ϕ1 и ϕ2. Управляемый коммутатор 4 передает угловую координату ϕ ракеты, равную ϕ1 (пеленгация ракеты в широком поле управления) или ϕ2 (пеленгация ракеты в узком поле управления). Переключение коммутатора 4 осуществляется по сигналу с пеленгатора ракеты с узким полем управления 2, свидетельствующему о встреливании ракеты в узкое поле управления. Измеренные угловые координаты ракеты ϕ и цели ϕц поступают соответственно на первый и второй входы блока формирования команды управления 5, где формируется команда управления Uh, пропорциональная линейному рассогласованию между ЛВЦ и ракетой ([2], стр. 369-371).
Сформированная команда управления ракетой Uh с выхода блока 5 поступает на первый вход сумматора 13, где суммируется с корректирующей командой Uк, поступающей на его второй вход с выхода блока формирования корректирующей команды управления 12, и далее устройством передачи команд управления 6 передается на ракету 7. Ракета 7 под действием суммарной команды управления осуществляет движение относительно ЛВЦ.
Корректирующая команда Uк формируется следующим образом. Пеленгатор ракеты с широким полем управления 3 измеряет также угловую скорость ракеты относительно ЛВЦ  которая поступает на вход блока формирования сигнала, пропорционального угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования 9, где по зависимости (3) формируется сигнал ζ. Далее этот сигнал сравнивается в блоке сравнения 10 с опорным сигналом ζоп, формируемым в блоке формирования опорного сигнала 8, и в случае выполнения условия (4) управляемый ключ 11 открывается, и на блок формирования корректирующей команды управления 12 с соответствующего выхода пеленгатора ракеты с широким полем управления 3 поступает текущая угловая скорость ракеты относительно ЛВЦ
которая поступает на вход блока формирования сигнала, пропорционального угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования 9, где по зависимости (3) формируется сигнал ζ. Далее этот сигнал сравнивается в блоке сравнения 10 с опорным сигналом ζоп, формируемым в блоке формирования опорного сигнала 8, и в случае выполнения условия (4) управляемый ключ 11 открывается, и на блок формирования корректирующей команды управления 12 с соответствующего выхода пеленгатора ракеты с широким полем управления 3 поступает текущая угловая скорость ракеты относительно ЛВЦ  где по зависимости (5) формируется корректирующая команда управления Uк. Далее корректирующая команда управления Uк поступает на соответствующий вход сумматора 13.
где по зависимости (5) формируется корректирующая команда управления Uк. Далее корректирующая команда управления Uк поступает на соответствующий вход сумматора 13.
Таким образом, решение поставленной задачи в предлагаемом способе наведения телеуправляемой ракеты и системе наведения для его реализации позволяет предотвратить перекрывание ОЛС носитель - ракета дымовым шлейфом факела собственного двигателя ракеты и срыв наведения ракеты в широком поле управления.
Предлагаемые способ наведения телеуправляемой ракеты и система наведения для его реализации позволяют повысить помехоустойчивость ОЛС носитель - ракета и эффективность комплексов вооружения телеуправляемых ракет, что выгодно отличает их от известных.
Источники информации
1. Ф. К. Неупокоев. Стрельба зенитными ракетами. - М.: Военное издательство, 1991.
2. А.А. Лебедев, В.А. Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965.
3. International Defense Review, 1972, v.5,015.
4. Aircraft, 1972, v.5, N 12.
5. Под ред. В.В. Григорина-Рябова. Радиолокационные устройства. - М.: Советское радио, 1970.
6. И.М. Тетельбаум, Ю.Р. Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987.
7. С.В. Якубовский и др. Аналоговые и цифровые интегральные микросхемы. - М.: Радио и связь, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2263874C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 1997 |
|
RU2122700C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2011 |
|
RU2466345C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260162C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2406067C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2009 |
|
RU2426969C2 |
Изобретение относится к ракетной технике и может быть использовано в комплексах вооружения телеуправляемых ракет. Технический результат - повышение точности наведения. В способе наведения телеуправляемой ракеты, включающем формирование широкого и узкого полей управления, запуск ракеты под углом к линии визирования цели, разгон ракеты с помощью двигателя в течение времени tp, наведение ракеты в широком поле управления в течение времени tp с формированием команды управления, пропорциональной угловому рассогласованию между факелом двигателя ракеты и линией визирования цели, наведение ракеты в узком поле управления с формированием команды управления, пропорциональной угловому рассогласованию между источником излучения на ракете и линией визирования цели. При наведении ракеты в широком поле управления формируют опорный сигнал, измеряют текущую угловую скорость ракеты относительно линии визирования цели, на ее основе формируют сигнал, пропорциональный угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования, сравнивают полученный сигнал с опорным сигналом, и в случае, если сигнал, пропорциональный угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования, меньше опорного, формируют пропорциональную текущей угловой скорости ракеты относительно линии визирования цели корректирующую команду управления и осуществляют наведение ракеты с учетом этой корректирующей команды. В систему наведения телеуправляемой ракеты, состоящую из пеленгатора цели и контура управления ракетой, включающего в каждом канале тангажа и курса пеленгатор ракеты с узким полем управления, последовательно соединенные пеленгатор ракеты с широким полем управления, управляемый коммутатор, второй вход которого соединен с первым выходом, а информационный вход - со вторым выходом пеленгатора ракеты с узким полем управления, и блок формирования команды управления, пропорциональной угловому рассогласованию между ракетой и линией визирования цели, второй вход которого соединен с соответствующим выходом пеленгатора цели, последовательно соединенные устройство передачи команд управления и ракету, введены блок формирования опорного сигнала, последовательно соединенные блок формирования сигнала, пропорционального угловому положению продольной оси дымового шлейфа факела двигателя ракеты относительно ее линии визирования, вход которого соединен со вторым выходом пеленгатора ракеты с широким полем управления, блок сравнения, второй вход которого подключен к выходу блока формирования опорного сигнала, последовательно соединенные управляемый ключ, вход которого соединен со вторым выходом пеленгатора ракеты с широким полем управления, а информационный вход - с выходом блока сравнения, блок формирования корректирующей команды управления и сумматор, второй вход которого подключен к выходу блока формирования команды управления, пропорциональной угловому рассогласованию между ракетой и линией визирования цели, а выход соединен с входом устройства передачи команд управления. За счет использования способа наведения телеуправляемой ракеты и системы наведения для его реализации повышается помехоустойчивость оптической линии связи "носитель - ракета" и эффективность комплексов вооружения телеуправляемых ракет. 2 с.п. ф-лы, 2 ил.
| НЕУПОКОЕВ Ф.К., Стрельба зенитными ракетами, М., Военное издательство, 1991, с.62-64 | |||
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ И РАКЕТНЫЙ КОМПЛЕКС | 1997 |
|
RU2124177C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126522C1 |
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ | 0 |
|
SU329523A1 |
| СПОСОБ ПОЛУЧЕНИЯ КОМПОЗИЦИОННЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ НА ОСНОВЕ НИТРИДА КРЕМНИЯ | 2017 |
|
RU2647540C1 |

