Изобретение относится к ракетной технике и предназначено для использования в системах наведения телеуправляемых ракет.
Известен способ наведения ракеты, включающий запуск ракеты, разгон ракеты с помощью разгонного двигателя, определение отклонения ракеты от требуемой расчетной траектории полета, формирование команды управления, пропорциональной отклонению ракеты от требуемой траектории, и передачу команды управления на ракету для наведения ее на цель ([1], А.А.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. М.: Машиностроение, 1965, с.325-330).
Наведение ракеты на разгонном участке сопровождается дымообразованием от собственного разгонного двигателя, что в случае использования системы теленаведения с визированием цели и (или) ракеты оптическими и оптико-электронными пеленгаторами на этапе управления, связанным с выводом ракеты на линию визирования цели (ЛВЦ), затрудняет слежение за целью, ослабляет сигналы по линии связи «ракета-носитель», снижает помехоустойчивость оптико-электронной системы управления и может привести к срыву наведения ракеты ([2], Ф.К.Неупокоев. Стрельба зенитными ракетами. - М.: Военное издательство, 1980, стр.29-31).
Известные способы наведения телеуправляемой ракеты, позволяющие повысить помехоустойчивость оптических линий связи (ОЛС) в условиях дымообразования собственного двигателя, основываются на разнесении в пространстве траектории активного участка полета ракеты с ЛВЦ.
В качестве прототипа принят способ наведения телеуправляемой ракеты, включающий запуск ракеты под углом к ЛВЦ с последующим совмещением с ней по программной траектории вывода, разгон ракеты с помощью разгонного двигателя и отделение двигателя от ракеты после ее разгона, измерение координат цели и ракеты, определение линейного отклонения ракеты от программной траектории вывода, формирование команды управления, пропорциональной линейному отклонению ракеты от программной траектории, и наведение по ней ракеты на цель ([3], патент РФ №2234041).
В известном способе разнесение траектории ракеты с ЛВЦ на активном участке полета обеспечивается за счет угла запуска ракеты и смещения программной траектории вывода ракеты относительно ЛВЦ, направление которых формируют исходя из сочетания угловой скорости движения ЛВЦ и поперечной скорости ветра относительно ЛВЦ.
Программная траектория вывода задает направление полета ракеты относительно ЛВЦ, а в момент отделения разгонного двигателя от ракеты и начальные условия по координатам и углу вектора скорости для дальнейшего движения отделившегося разгонного двигателя. Эти начальные условия должны обеспечивать непопадание траектории двигателя на ЛВЦ, а также координаты точки приземления разгонного двигателя, при которых исключается экранирование ЛВЦ создаваемым им при падении пыледымовым облаком.
В реальных условиях ракета движется по траектории, отличающейся от заданной программной траектории из-за воздействия на нее начальных возмущений при сходе с пусковой установки, разбросов параметров ракеты и системы управления, шумов в измеряемых координатах и т.д. Движение ракеты по фактической траектории сопровождается отклонениями центра масс ракеты и углового положения вектора скорости ракеты относительно программной траектории. Поэтому на момент отделения разгонного двигателя направление его вектора скорости может не совпадать с направлением, задаваемым программной траекторией, а быть направленным к ЛВЦ. Это может привести к экранированию ОЛС и созданию помех пеленгаторам в виде пыле дымового облака после приземления двигателя.
В связи с этим известный способ теленаведения ракеты ограничен применением, так как указанные факторы в условиях реальной стрельбы могут приводить в системе наведения к прерываниям ОЛС с целью и ракетой и, соответственно, к срыву наведения ракеты.
Задачей предлагаемого изобретения является предотвращение перекрывания ОЛС «носитель-ракета», «носитель-цель» дымовым шлейфом от собственного разгонного двигателя ракеты и пыледымовым облаком, образующимся при приземлении отделившегося разгонного двигателя ракеты, и предотвращение срыва наведения телеуправляемой ракеты.
Поставленная задача достигается за счет того, что в способе наведения телеуправляемой ракеты, включающем запуск ракеты под углом к ЛВЦ с последующим совмещением с ней по программной траектории вывода, разгон ракеты с помощью разгонного двигателя и отделение двигателя от ракеты после ее разгона, измерение координат цели и ракеты, определение линейного отклонения ракеты от программной траектории вывода, формирование команды управления, пропорциональной линейному отклонению ракеты, и наведение по ней ракеты на цель, новым является то, что на разгонном участке траектории полета ракеты в курсовой плоскости наведения ракеты устанавливают заранее, до запуска ракеты, пороговое значение параметра движения ракеты относительно ЛВЦ, проводят по координатам цели и ракеты оценку текущего значения параметра движения ракеты относительно ЛВЦ, сравнивают, с учетом направления программной траектории вывода относительно ЛВЦ, текущее значение параметра движения ракеты с его установленным пороговым значением, и если текущее значение параметра движения ракеты меньше порогового значения, то формируют корректирующую команду управления ракетой по величине, пропорциональную располагаемой перегрузке ракеты, а по знаку - уводящую ракету в сторону от ЛВЦ, суммируют сформированную корректирующую команду с командой управления, пропорциональной линейному отклонению, и далее, на разгонном участке траектории, наведение ракеты осуществляют по суммарной команде управления.
В предлагаемом способе наведения телеуправляемой ракеты в качестве параметра движения ракеты относительно ЛВЦ используют скорость изменения линейного отклонения ракеты относительно ЛВЦ.
В предлагаемом способе наведения телеуправляемой ракеты в качестве параметра движения ракеты относительно ЛВЦ используют угол вектора скорости ракеты относительно ЛВЦ.
В предлагаемом способе наведения телеуправляемой ракеты величину корректирующей команды управления определяют как разность модулей максимальной команды управления ракетой и команды управления, пропорциональной линейному отклонению ракеты от программной траектории вывода.
В предлагаемом способе решение задачи основывается на создании в процессе наведения ракеты такого ее углового положения относительно ЛВЦ, при котором на разгонном участке полета обеспечиваются односторонние, без пересечения ЛВЦ, угловые положения ракеты и ее дымового шлейфа, а на момент разделения ракеты обеспечивается такое ее угловое положение, при котором отделившийся разгонный двигатель в своем дальнейшем движении, а также образуемое им при приземлении пыледымовое облако, не экранируют ОЛС «носитель-ракета», «носитель-цель», а сама ракета после разделения совмещается с ЛВЦ, обеспечивая заданную точность наведения.
Наведение ракеты осуществляется следующим образом. Производят слежение за целью и определяют ее координаты: угол места εц(t) и азимут βц(t) в функции времени t. Угловое смещение ракеты относительно ЛВЦ создают углом запуска ракеты β0 и программной траекторией вывода Вп(t).
Программную траекторию вывода задают, например, в виде постоянного углового смещения В01, т.е.

или в виде изменяющегося смещения
где В02 - начальное угловое смещение;
Тп - постоянная времени, определяемая длительностью программной траектории;
τ - время, отсчитываемое от момента запуска ракеты.
Величину угла запуска ракеты относительно ЛВЦ β0 выбирают такой, чтобы к моменту начала управления tну ракета выстраивалась на программную траекторию вывода, т.е.
Направления угла запуска ракеты и программной траектории вывода относительно ЛВЦ задают в соответствии со знаком функции f, определяемой до схода ракеты, например, по соотношению ([3], патент РФ №2234041)

где  - угловая скорость ЛВЦ в курсовой плоскости;
- угловая скорость ЛВЦ в курсовой плоскости;
wz - поперечная составляющая скорости ветра по отношению к ЛВЦ;
Др - ожидаемая дальность окончания разгонного участка полета ракеты;
sign[.] - функция знака.
Угловая скорость ЛВЦ  измеряется аппаратными средствами системы наведения, например пеленгатором цели в процессе ее сопровождения, а ожидаемая дальность окончания разгонного участка полета ракеты Др определяется расчетным или опытным путем и хранится в памяти системы наведения.
измеряется аппаратными средствами системы наведения, например пеленгатором цели в процессе ее сопровождения, а ожидаемая дальность окончания разгонного участка полета ракеты Др определяется расчетным или опытным путем и хранится в памяти системы наведения.
До запуска ракеты формируют пороговое значение параметра движения ракеты относительно ЛВЦ на разгонном участке траектории. Это значение должно соответствовать такому значению параметра движения ракеты относительно ЛВЦ на момент отделения разгонного двигателя, при котором дальнейшая траектория отделившегося разгонного двигателя не будет направлена в сторону ЛВЦ. Например, при использовании в качестве параметра движения ракеты относительно ЛВЦ скорости изменения линейного отклонения ракеты относительно ЛВЦ  или угла вектора скорости ракеты относительно ЛВЦ φ их нулевые значения на момент отделения разгонного двигателя tрд (
или угла вектора скорости ракеты относительно ЛВЦ φ их нулевые значения на момент отделения разгонного двигателя tрд ( , φрд=0) будут определять движение отделившегося разгонного двигателя с координаты смещения ракеты относительно ЛВЦ параллельно ЛВЦ, не пересекая ее. В таком случае пороговое значение соответствующих параметров движения ракеты задают нулевым, т.е.
, φрд=0) будут определять движение отделившегося разгонного двигателя с координаты смещения ракеты относительно ЛВЦ параллельно ЛВЦ, не пересекая ее. В таком случае пороговое значение соответствующих параметров движения ракеты задают нулевым, т.е.  или φП=0.
или φП=0.
При необходимости обеспечения траектории, уводящей отделившийся разгонный двигатель в сторону от ЛВЦ, например, отвода от ЛВЦ объемного пыледымового облака, создаваемого двигателем при приземлении, пороговое значение соответствующих параметров движения задают ненулевым, соответствующим значениям, определяющим движение ракеты в сторону от ЛВЦ на момент отделения двигателя, т.е.  или φП=φП0>0.
или φП=φП0>0.
После запуска ракеты измеряют ее координаты: угол места εp(t), азимут βp(t) и дальность rp(t) и далее после начала ее управления в соответствии с выбранным методом наведения и с учетом программной траекторий вывода ВП(t) определяют текущее линейное отклонение ракеты h(t) относительно программной траектории вывода по соотношению

Далее формируют текущую команду управления U(t), пропорциональную линейному отклонению ракеты относительно программной траектории вывода, в соответствии с соотношением ([1], стр.370-371)

где kk(t) - значение программного коэффициента передачи разомкнутого контура управления ракетой;
T(t) - весовой коэффициент, учитывающий производную отклонения ракеты.
Значения коэффициентов kk(t) и T(t) определяют при анализе устойчивости и точности замкнутого контура управления ракетой, производную отклонения  получают посредством дифференцирующего фильтра низких частот.
получают посредством дифференцирующего фильтра низких частот.
Затем проводят оценку текущего значения параметра движения ракеты относительно ЛВЦ на разгонном участке траектории полета.
При использовании в качестве такого параметра скорости изменения линейного отклонения ракеты относительно ЛВЦ определяют линейное отклонение ракеты относительно ЛВЦ по соотношению

и далее проводят оценку параметра движения ракеты, под которым понимается в данном случае текущее сглаженное значение скорости изменения линейного отклонения  . Эту оценку получают посредством фильтрации линейного отклонения H(t) известным способом, например, в соответствии с алгоритмом калмановской фильтрации по соотношениям ([4], Основы проектирования ракет класса «воздух-воздух» и авиационных катапультных установок для них. Под ред. В.А.Нестерова - М.: Дрофа, 2002, стр.225-232).
. Эту оценку получают посредством фильтрации линейного отклонения H(t) известным способом, например, в соответствии с алгоритмом калмановской фильтрации по соотношениям ([4], Основы проектирования ракет класса «воздух-воздух» и авиационных катапультных установок для них. Под ред. В.А.Нестерова - М.: Дрофа, 2002, стр.225-232).
где k1, k2 - коэффициенты фильтрации.
При использовании в качестве параметра движения ракеты угла вектора скорости ракеты относительно ЛВЦ определяют оценку текущего значения угла вектора скорости ракеты следующим образом. Угол вектора скорости ракеты относительно ЛВЦ состоит из двух составляющих:
- составляющей угла вектора скорости ракеты, определяемой движением ракеты по программной траектории вывода;
- составляющей угла вектора скорости ракеты, определяемой отклонением ракеты от программной траектории вывода.
Первая составляющая угла вектора скорости ракеты определяется соотношением ([1], стр.346)
где  - угловая скорость изменения программной траектории вывода;
- угловая скорость изменения программной траектории вывода;
Vp(t) - текущее значение линейной скорости ракеты.
Линейную скорость ракеты Vp(t) получают либо измерением скорости ракеты, либо по обработке (дифференцировании измеренной дальности ракеты rp(t)), либо используется программное значение скорости.
Угловую скорость  задают программно в соответствии с программной траекторией вывода ВП(t) или получают дифференцированием программной траектории вывода.
задают программно в соответствии с программной траекторией вывода ВП(t) или получают дифференцированием программной траектории вывода.
Вторая составляющая угла вектора скорости ракеты определяется по соотношению
Таким образом, оценка текущего значения угла вектора скорости ракеты относительно ЛВЦ в этом случае определяется соотношением

Затем сравнивают текущее значение параметра движения ракеты с установленным его пороговым значением с учетом выбранного направления f программной траектории вывода (1). При использовании в качестве параметра движения ракеты относительно ЛВЦ скорости изменения линейного отклонения ракеты относительно ЛВЦ, если выполняется соотношение

формируют корректирующую команду управления Uk(t).
При использовании в качестве параметра движения ракеты относительно ЛВЦ угла вектора скорости ракеты относительно ЛВЦ, если выполняется соотношение

формируют корректирующую команду управления Uk(t).
Корректирующая команда для необходимой коррекции траектории ракеты формируется пропорционально располагаемой перегрузке ракеты (для использования всех маневренных возможностей ракеты) и действует в направлении, уводящем ракету в сторону от ЛВЦ.
Величина корректирующей команды может быть определена следующим образом. Для ракеты известна функциональная зависимость между командой управления U и развиваемой ракетой перегрузкой np

Наведение ракеты по программной траектории вывода под действием команды управления Uh(t), пропорциональной линейному отклонению ракеты (3), соответствует развиваемой ракетой перегрузке nh(t). Тогда величина перегрузки ракеты, которая может быть использована для коррекции траектории, равна

где np - известная для ракеты зависимость располагаемой перегрузки по времени полета;
Umax - максимальная команда управления ракетой, соответствующая располагаемой перегрузке ракеты.
Поэтому величина корректирующей команды управления определяется зависимостью вида

где f1 - функциональная зависимость, обратная функциональной зависимости из соотношения (15).
Для ракеты функциональная зависимость (15) имеет, как правило, линейный характер ([2], стр.115), поэтому величина корректирующей команды будет определяться соотношением

С учетом направления, необходимого для увода ракеты в сторону от ЛВЦ, корректирующая команда Uk(t) равна

Команду управления, подаваемую на ракету, с учетом корректирующей команды определяют по соотношению:

где Uc(t) - суммарная команда управления, передаваемая на ракету.
Под действием сформированной суммарной команды управления Uc(t) будет обеспечиваться такое угловое положение ракеты на момент отделения разгонного двигателя, при котором его дальнейшая траектория не будет пересекать ЛВЦ, а образуемое при приземлении двигателя пыледымовое облако не будет экранировать ОЛС, что благополучно скажется на процессе наведения ракеты.
Предлагаемый способ наведения телеуправляемой ракеты может быть реализован системой наведения, функциональная схема курсового канала управления которой приведена на фиг.
Система наведения ракеты (фиг.) состоит из формирователя программной траектории вывода (ФПТ) 1, пеленгатора цели (ПЦ) 2, последовательно соединенных пеленгатора ракеты (ПР) 3, блока формирования линейного отклонения ракеты относительно программной траектории (ФЛО) 4, первый и второй входы которого соединены с соответствующими выходами пеленгатора ракеты 3, третий вход - с выходом пеленгатора цели, а четвертый вход соединен со вторым выходом формирователя программной траектории 1, формирователя команды управления, пропорциональной линейному отклонению (ФК) 5, сумматора (С) 6, передатчика команд (ПК) 7, ракеты (Р) 8, а также формирователя порогового значения параметра движения ракеты относительно ЛВЦ (ФПЗ) 12, формирователя параметра движения ракеты относительно ЛВЦ (ФПД) 9 (на фиг. приведены связи блока 9 для случая использования в качестве параметра движения ракеты относительно ЛВЦ - линейного отклонения ракеты относительно ЛВЦ), первый и второй входы которого соединены соответственно с первым и вторым выходами пеленгатора ракеты 3, третий вход соединен с выходом пеленгатора цели 2, а четвертый вход - с первым выходом формирователя программной траектории 1, блока сравнения (БС) 10, первый вход которого соединен с выходом блока 9, а второй - с выходом формирователя порогового значения 12, и формирователя корректирующей команды (ФКК) 11, первый вход которого соединен с блоком сравнения 10, второй - с первым выходом формирователя программной траектории 1, третий вход соединен с выходом формирователя команды управления, пропорциональной линейному отклонению 5, а выход соединен со вторым входом сумматора 6.
Составляющие элементы системы: формирователь программной траектории вывода 1, пеленгатор цели 2, пеленгатор ракеты 3, блок формирования линейного отклонения ракеты 4, формирователь команды управления, пропорциональной линейному отклонению 5, сумматор 6, блок сравнения 10 и устройство передачи команд управления 7 - представляют собой известные штатные элементы систем наведения ракет ([1], с.366-372).
Формирователь параметра движения ракеты относительно ЛВЦ 9, формирователь команды коррекции 11 и формирователь порогового значения представляют собой счетно-решающие устройства, реализующие соотношения (7)-(9) и (17)-(19), могут быть выполнены, например, на базе операционных усилителей ([5], И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М. Энергоатомиздат, 1987, с.178-186, 221-222).
Система наведения телеуправляемой ракеты работает следующим образом. Пеленгатор цели 2 осуществляет сопровождение цели и измеряет ее координаты, формирователь программной траектории 1 формирует программную траекторию вывода ракеты в виде углового смещения ракеты относительно ЛВЦ соответствующего направления, блок 12 формирует пороговое значение параметра движения ракеты относительно ЛВЦ.
После запуска ракеты пеленгатор ракеты 3 захватывает на сопровождение ракету и измеряет ее координаты. Измеренные угловая координата и дальность ракеты и угловая координата цели поступают соответственно на первый, второй и третий входы блока формирования линейного отклонения ракеты 4 и на соответствующие входы блока формирования параметра движения ракеты относительно ЛВЦ 9. По сформированному значению линейного отклонения, поступающему с блока 4, в блоке 5 по соотношению (6) формируется команда управления, пропорциональная линейному отклонению относительно ЛВЦ. В блоке 9 формируется значение линейного отклонения ракеты относительно ЛВЦ и определяется его оценка (т.е. определяется параметр движения ракеты относительно ЛВЦ), значение которого сравнивается в блоке 10 с пороговым значением и по результатам сравнения в блоке 11 с учетом направления программной траектории, определяемого сигналом f, поступающим на вход 2, формируется по соотношениям (17)-(19) корректирующая команда управления, которая в блоке 6 суммируется с командой управления, пропорциональной линейному отклонению относительно ЛВЦ и далее передается на ракету 8. Ракета 8 под действием суммарной команды принимает такое угловое положение относительно ЛВЦ, при котором на момент отделения разгонного двигателя его дальнейшая траектория не будет пересекать ЛВЦ, а образуемое при приземлении двигателя пыледымовое облако не будет экранировать ОЛС.
Таким образом, предлагаемый способ наведения телеуправляемой ракеты позволяет предотвратить срыв наведения в условиях помех, создаваемых собственным разгонным двигателем ракеты, что выгодно отличает его от известных способов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2406067C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280232C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280227C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2263874C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 1997 |
|
RU2122700C1 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
Изобретение относится к ракетной технике и может быть использовано в комплексах вооружения телеуправляемых ракет. На разгонном участке траектории полета ракеты в курсовой плоскости наведения ракеты устанавливают заранее, до запуска ракеты, пороговое значение параметра движения ракеты относительно линии визирования цели. Проводят по координатам цели и ракеты оценку текущего значения параметра движения ракеты относительно линии визирования цели. Сравнивают, с учетом направления программной траектории вывода относительно линии визирования цели, текущее значение параметра движения ракеты с его установленным пороговым значением. Если текущее значение параметра движения ракеты меньше порогового значения, то формируют корректирующую команду управления ракетой по величине, пропорциональную располагаемой перегрузке ракеты, а по знаку - уводящую ракету в сторону от линии визирования цели. Суммируют сформированную корректирующую команду с командой управления, пропорциональной линейному отклонению. На разгонном участке траектории наведение ракеты осуществляют по суммарной команде управления. Технический результат - предотвращение срыва наведения ракеты в условиях помех, создаваемых собственным разгонным двигателем ракеты. 3 з.п. ф-лы, 1 ил.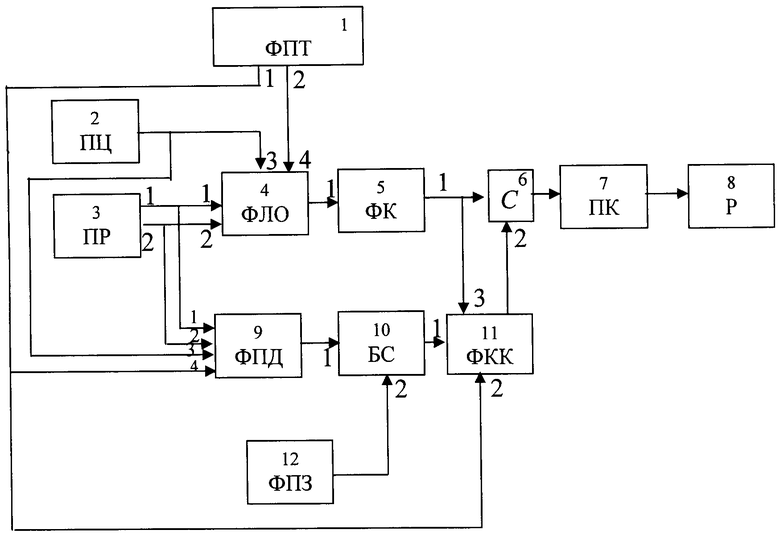
1. Способ наведения телеуправляемой ракеты, включающий запуск ракеты под углом к линии визирования цели с последующим совмещением с ней по программной траектории вывода, разгон ракеты с помощью разгонного двигателя и отделение двигателя от ракеты после ее разгона, измерение координат цели и ракеты, определение линейного отклонения ракеты от программной траектории вывода, формирование команды управления, пропорциональной линейному отклонению ракеты, и наведение по ней ракеты на цель, отличающийся тем, что на разгонном участке траектории полета ракеты в курсовой плоскости наведения ракеты устанавливают заранее, до запуска ракеты, пороговое значение параметра движения ракеты относительно линии визирования цели, проводят по координатам цели и ракеты оценку текущего значения параметра движения ракеты относительно линии визирования цели, сравнивают, с учетом направления программной траектории вывода относительно линии визирования цели, текущее значение параметра движения ракеты с его установленным пороговым значением, и если текущее значение параметра движения ракеты меньше порогового значения, то формируют корректирующую команду управления ракетой по величине, пропорциональную располагаемой перегрузке ракеты, а по знаку - уводящую ракету в сторону от линии визирования цели, суммируют сформированную корректирующую команду с командой управления, пропорциональной линейному отклонению, и далее, на разгонном участке траектории, наведение ракеты осуществляют по суммарной команде управления.
2. Способ по п.1, отличающийся тем, что в качестве параметра движения ракеты относительно линии визирования цели используют скорость изменения линейного отклонения ракеты относительно линии визирования цели.
3. Способ по п.1, отличающийся тем, что в качестве параметра движения ракеты относительно линии визирования цели используют угол вектора скорости ракеты относительно линии визирования цели.
4. Способ по п.1, отличающийся тем, что величину корректирующей команды управления ракетой определяют как разность модулей максимальной команды управления и команды управления, пропорциональной линейному отклонению ракеты от программной траектории вывода.
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2009 |
|
RU2402743C1 |
| Квантовый парамагнитный усилительбЕгущЕй ВОлНы | 1978 |
|
SU724031A1 |
| US 3677500 A, 18.07.1972. | |||

