Изобретение относится к электротехнике, в частности к областям автоматизированного электропривода и преобразовательной техники.
Известен электропривод с полупроводниковым преобразователем и микропроцессорным блоком управления (МПБУ) [1], содержащий электродвигатель постоянного тока, тиристорный преобразователь, МПБУ, датчики регулируемых величин (тока, скорости двигателя и др.) и пульт управления. В МПБУ реализуются система импульсно-фазового регулирования угла управления тиристорного преобразователя, регуляторы тока и скорости, устройства раздельного управления комплектами тиристоров преобразователя и устройства защиты. В качестве датчика скорости используется тахогенератор, подключенный к МПБУ через АЦП.
Недостатком данного устройства является ограниченный диапазон регулирования минимальной скорости двигателя, который имеет место из-за недостаточной точности измерения при помощи АЦП сигналов низкого уровня, например 1-10 мВ.
Известные микропроцессорные электроприводы с цифровыми датчиками положения (пути), выполненные с большим количеством импульсов на оборот, не имеют проблемы получения минимальной скорости вращения. Однако данный датчик положения представляет собой сложное и дорогостоящее электромеханическое устройство, выполненное на базе высокоточных оптических датчиков или резольверов с системой декодирования сигналов. Поэтому данные электроприводы не нашли широкого применения.
Наиболее близким по технической сущности к заявленному решению и взятым за прототип является тиристорный электропривод по [2]. Функциональная схема данного электропривода приведена в [2] на стр.174. Здесь реверсивный тиристорный преобразователь ТП подключен к сети и двигателю постоянного тока М через датчик тока ДТ. МБПУ обеспечивает регулирование угла управления ТП, тока i и скорости двигателя n. Управление скоростью двигателя осуществляется от пульта, в качестве датчика скорости используется аналоговый тахогенератор BR, подключенный к микропроцессору через блок преобразования «напряжение-код» ПНК (или АЦП).
Недостаток прототипа заключается в ограниченном диапазоне регулирования минимальной скорости, обусловленной погрешностью блока ПНК при измерении малых сигналов, что ухудшает статические характеристики электропривода. Например, для стандартного тахогенератора типа ТП-80, имеющего выходное напряжение 20 В при скорости 1000 об/мин и погрешности ПНК в 10 мВ, ориентировочно имеем минимальное измеряемое напряжение тахогенератора с погрешностью 10%
 .
.
Этому напряжению в данном примере соответствует предельная минимальная скорость двигателя
 .
.
Ниже значения nмин скорость не может регулироваться с требуемой точностью. Однако в системах широкорегулируемого электропривода требуются более низкие скорости, например nмин=0,1 об/мин. Это принципиально невозможно получить в прототипе.
Технический результат заявляемого решения - улучшение статических и динамических характеристик электропривода.
Технический результат достигается тем, что в микропроцессорном электроприводе, содержащем полупроводниковый преобразователь, электродвигатель, тахогенератор, датчик тока, задатчик скорости, термодатчики и микропроцессорный блок управления, управляющие цепи полупроводникового преобразователя через блок согласующих элементов соединены с выходами микропроцессорного блока управления, программно реализующего систему подчиненного регулирования скорости электродвигателя с регуляторами тока и скорости, при этом последний выполнен двухзвенным и состоит из программного цифрового регулятора скорости, например ПИ-типа, содержащегося в микропроцессорном блоке управления, и внешнего аналогового регулятора, например П-типа, входы которого подключены к задатчику скорости и тахогенератору, а его выход соединен с входом АЦП микропроцессорного блока управления, выход которого соединен с входом цифрового регулятора скорости, выходной сигнал которого является заданием тока электропривода на входе регулятора тока.
В устройстве аналоговый регулятор скорости выполняется с цифровым программированием коэффициента усиления, который изменяется в зависимости от уровня скорости двигателя, при этом его цифровой вход соединен с соответствующим выходом микропроцессора.
Отличительной особенностью изобретения является то, что улучшение статических и динамических характеристик электропривода достигается за счет выполнения регулятора скорости двухзвенным блоком с цифровой и аналоговой частью. При этом цифровая часть расположена в микропроцессорном блоке управления и является программируемой, а аналоговая часть является внешним регулятором, где производится суммирование сигналов задатчика скорости и тахогенератора, а также цифровое программирование его коэффициента усиления.
На фиг.1 приведена схема заявляемого устройства, где приняты следующие обозначения:
1 - полупроводниковый преобразовтель, выполняемый на тиристорах либо на транзисторах для приводов постоянного или переменного тока;
2 - датчик тока;
3 - электродвигатель постоянного или переменного тока;
4 - тахогенератор (аналоговый датчик скорости);
5 - блок согласующих элементов, например импульсных трансформаторов или оптронных элементов;
6 - микропроцессорный блок управления с аппаратной частью и программным обеспечением;
7 - программно-аппаратный узел системы управления преобразователем;
8 - программно-аппаратный цифровой регулятор тока, например пропорционально-интегрального (ПИ) типа;
9 - программно-аппаратный цифровой регулятор скорости, например ПИ-типа;
10 - АЦП (блок, состоящий из нескольких аналого-цифровых преобразователей);
11 - программно-аппаратный блок защиты;
12, 13 - термодатчики, встроенные в устройства 1, 3;
14 - аналоговый регулятор скорости, например пропорционального (П) типа, с программированием его коэффициента усиления. В качестве такого регулятора может быть использована микросхема LTC 6910-1;
15 - задатчик скорости, который может быть выполнен в виде потенциометра, либо цифрового пульта с устройством ЦАП на выходе;
UЗ - задающий сигнал;
n, i - выходные сигналы соответственно тахогенератора 4 и датчика тока 2;
 ,
,  - выходные сигналы датчиков температуры 12 и 13;
- выходные сигналы датчиков температуры 12 и 13;
ΔU=(UЗ-n)K1 - выходной сигнал внешнего аналогового регулятора скорости 14 (K1 - коэффициент усиления);
 ,
,  - соответственно цифровые аналоги сигналов Δu и i;
- соответственно цифровые аналоги сигналов Δu и i;
0 - сигнал установки нуля скорости при UЗ=0 для исключения дрейфа скорости.
В предлагаемом устройстве на выход полупроводникового преобразователя 1 подключен через датчик тока 2 электродвигатель 3, сочлененный с тахогенератором 4, управляющие цепи преобразователя 1 через блок согласующих элементов 5 подключены к выходам микропроцессорного блока управления 6 программно и аппаратно реализующего: систему управления преобразователем 7, регулятор тока 8, цифровой регулятор скорости 9, многовходовой аналогово-цифровой преобразователь (АЦП) 10 и блок защиты 11, на вход которого поступают сигналы с датчика тока 2, тахогенератора 4 и терморезисторов 12, 13 через АЦП 10, при этом первый вход АЦП 10 подключен к выходу аналогового регулятора 14, входы которого соединены с тахогенератором 4 и задатчиком скорости 15, цифровой вход регулятора 14 подключен к соответствующему выходу микропроцессорного блока управления 6.
Устройство (фиг.1) работает следующим образом.
На вход аналогового регулятора скорости 14 с задатчика скорости 15 поступает задающий сигнал, величина и полярность которого определяют уровень скорости и направление вращения двигателя 3. Выходной сигнал Δu регулятора 14 поступает на первый вход АЦП 10, преобразуется в цифровую форму  и программно передается в цифровой регулятор скорости 9. Выходной сигнал регулятора скорости 9 является заданием тока двигателя для цифрового регулятора тока 8, на который также поступает сигнал обратной связи по току через АЦП. Выходной сигнал регулятора тока 8 определяет регулирующие параметры выходных импульсов системы управления 7. При этом если преобразователь 1 представляет собой управляемый выпрямитель, то выходной сигнал регулятора тока 8 определяет угол регулирования α и соответствующий комплект тиристоров («вперед» или «назад». Если блок 1 представляет собой широтно-импульсный преобразователь, то выходной сигнал регулятора тока 8 определяет скважность импульсов управления. В целом микропроцессорный блок управления 6 выполняет функции системы регулирования основных величин электропривода (n, i и др.), устройства импульсного управления преобразователем и устройства защиты от аварийных режимов. Последняя функция выполняется за счет введения сигналов основных датчиков 2, 4, 12, 13 через блок АЦП 10 в блок защиты 11. Из блока 6 импульсы управления через блок 5 поступают на управляющие цепи полупроводниковых ключей преобразователя 1.
и программно передается в цифровой регулятор скорости 9. Выходной сигнал регулятора скорости 9 является заданием тока двигателя для цифрового регулятора тока 8, на который также поступает сигнал обратной связи по току через АЦП. Выходной сигнал регулятора тока 8 определяет регулирующие параметры выходных импульсов системы управления 7. При этом если преобразователь 1 представляет собой управляемый выпрямитель, то выходной сигнал регулятора тока 8 определяет угол регулирования α и соответствующий комплект тиристоров («вперед» или «назад». Если блок 1 представляет собой широтно-импульсный преобразователь, то выходной сигнал регулятора тока 8 определяет скважность импульсов управления. В целом микропроцессорный блок управления 6 выполняет функции системы регулирования основных величин электропривода (n, i и др.), устройства импульсного управления преобразователем и устройства защиты от аварийных режимов. Последняя функция выполняется за счет введения сигналов основных датчиков 2, 4, 12, 13 через блок АЦП 10 в блок защиты 11. Из блока 6 импульсы управления через блок 5 поступают на управляющие цепи полупроводниковых ключей преобразователя 1.
За счет такой структуры регулирования с двухзвенным регулятором скорости обеспечивается высокая чувствительность электропривода к малым входным сигналам, как это имеет место в аналоговых системах. Для исключения дрейфа скорости при UЗ=0 в блок вводится цифровой сигнал 0. Эффект высокой точности обеспечивается выбором коэффициента усиления К1 регулятора 14. В результате этого компенсируется погрешность АЦП 10 в  раз внешним контуром регулирования, содержащим датчик скорости 4. В этом случае передаточная функция двухзвенного регулятора скорости имеет вид:
раз внешним контуром регулирования, содержащим датчик скорости 4. В этом случае передаточная функция двухзвенного регулятора скорости имеет вид:

где W1(p), W2(p) - передаточные функции соответственно аналогового и цифрового регулятора, а К1, К2 их коэффициенты передачи;
К=К1·К2 - общий коэффициент передачи регулятора;
 - постоянная времени интегральной части регулятора.
- постоянная времени интегральной части регулятора.
За счет программного изменения коэффициента усиления К в функции уровня скорости электропривода предлагаемое устройство обеспечивает возможность повышения быстродействия системы регулирования в области малых сигналов (скоростей), что очень важно в станочных электроприводах и робототехнике. При этом с увеличением коэффициента К возрастает частота среза и быстродействие CAP. В частном случае при W2(p)=1 и W(p) по (1) система превращается в CAP с аналоговым ПИ-регулятором скорости и цифровым регулятором тока.
Предлагаемое устройство может использоваться с различными типами преобразователей и двигателей (постоянного и переменного тока), оснащенных аналоговыми тахогенераторами и является универсальным. Устройство сочетает в себе известные преимущества аналоговых и микропроцессорных систем управления, обеспечивая высокую точность, быстродействие и гибкость в управлении.
Данное предлагаемое изобретение целесообразно запатентовать в ведущих странах.
Источники информации
1. В.Г.Файнштейн, Е.Г.Файнштейн. Микропроцессорные системы управления тиристорными электроприводами. М: Энергоатомиздат, 1986, 240 с.
2. В.М.Перельмутер, В.А.Сидоренко. Системы управления тиристорными электроприводами постоянного тока. М: Энергоатомиздат, 1988, 303 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| СПОСОБ АСИНХРОННОГО УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2450412C1 |
| УСТРОЙСТВО ДЛЯ МИКРОДУГОВОГО ОКСИДИРОВАНИЯ МЕТАЛЛОВ И ИХ СПЛАВОВ | 2007 |
|
RU2333299C1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| ЭЛЕКТРИФИЦИРОВАННЫЙ СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН | 2002 |
|
RU2281524C2 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2326480C1 |
| Устройство управления летучими ножницами, снабженными механизмом выравнивания скоростей | 1990 |
|
SU1712080A1 |
| МИКРОПРОЦЕССОРНЫЙ БЛОК УПРАВЛЕНИЯ ВЫПРЯМИТЕЛЬНО-ИНВЕРТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ БУВИП(М) | 2002 |
|
RU2251785C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 1992 |
|
RU2022824C1 |
| Устройство регулирования электрической мощности переменного тока | 1991 |
|
SU1830523A1 |
Изобретение относится к электротехнике, в частности к области автоматизированного электропривода и преобразовательной техники. Технический результат заключается в улучшении статических и динамических характеристик электропривода. Для этого устройство содержит полупроводниковый преобразователь, электродвигатель, тахогенератор, датчик тока, задатчик скорости, термодатчики, микропроцессорный блок управления, блок согласующих элементов, при этом регулятор скорости выполнен двухзвенным и состоит из программного цифрового регулятора, например ПИ-типа, содержащегося в микропроцессорном блоке управления, и внешнего аналогового регулятора, например П-типа. 1 з.п. ф-лы, 1 ил.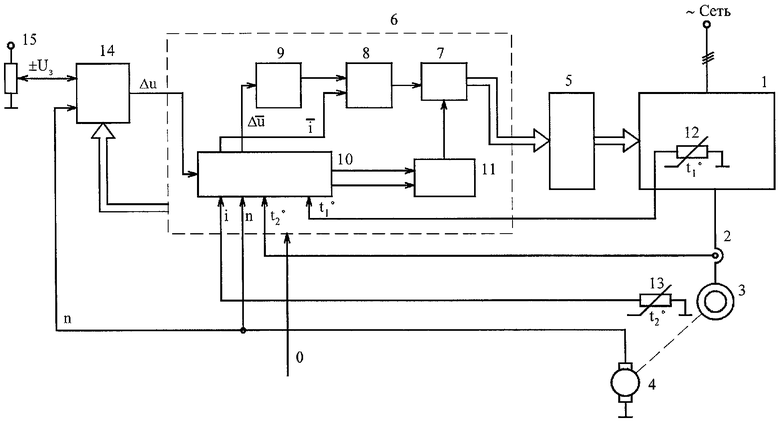
| ПЕРЕЛЬМУТЕР В.М | |||
| и др | |||
| Системы управления тиристорными электроприводами постоянного тока | |||
| - М.: Энергоатомиздат, 1988, с.303 | |||
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2141164C1 |
| SU 1821886 A1, 15.06.1993 | |||
| Многодвигательный электропривод | 1979 |
|
SU773885A1 |
| US 4514666, 30.04.1985. | |||

