Изобретение относится к электротехнике, к способам управления входными преобразователями тягового электропривода электроподвижного состава переменного тока и может быть использовано в тяговых преобразователях электровозов и электропоездов как переменного тока, так и нескольких родов тока, по крайней мере, один из которых - переменный.
Известен способ управления четырехквадрантным преобразователем, при котором сравнивают формируемые системой управления тактовый сигнал треугольной формы с сигналом задания, изменяющегося по частоте и амплитуде. В канале сравнения формируют управляющий сигнал, соответствующий логической «1», если тактовый сигнал меньше сигнала задания, и логическому «0», если тактовый сигнал больше сигнала задания, который дополнительно с инверсным сигналом используют для управления верхним и нижним ключами соответствующего плеча преобразователя. Модулирующие сигналы представляют собой дискретные выборки табличных значений зависимостей длин коммутационных интервалов ключей четырехквадрантного преобразователя от глубины модуляции, развертка которых во времени осуществляется по прерываниям процессора микропроцессорной системы управления преобразователем (Беляев А.В. Алгоритмы управления четырехквадрантным преобразователем / А.В.Беляев, К.П.Солтус, M.Ю.Капустин // Электровозостроение: Сб. науч. тр. / ОАО "Всерос. науч.-иссл., и проектно-конструкт. ин-т электровозостроения" (ОАО "ВЭлНИИ"). - Новочеркасск, 2003. Т.45. С.341-354).
При таком способе возможны режимы работы, когда на первом интервале входной ток, не достигнув заданного значения, снова спадает до нуля. Импульсы модулирующего напряжения при таком способе асимметричны относительно оси ординат и, следовательно, спектр напряжения содержит четные гармоники. В результате, при таком способе управления невозможно обеспечить стабильно высокое значение коэффициента формы тока и, следовательно, - ожидаемое качество управления четырехквадрантным преобразователем - высокий коэффициент мощности.
Наиболее близким по технической сущности является следующий способ управления четырехквадрантным преобразователем. Четырехквадрантный преобразователь содержит два параллельно подключенных управляемых полумоста из последовательно соединенных первого и второго силовых ключей и полумост обратных вентилей, подключенных соответственно к первому и второму выводам источника питания, а выходами к нагрузке. Способ состоит в том, что коммутацию силовых ключей преобразователя осуществляют в моменты времени, определяемые соотношением модулируемого напряжения и напряжения "развертки" генератора пилообразного напряжения на основании логических функций. При этом формирование импульсов управления осуществляют путем сравнения тактового сигнала и модулирующего синусоидального сигнала задания, изменяющегося по частоте и амплитуде. Причем знак модулирующего сигнала изменяют на противоположный два раза за период в моменты времени, соответствующие точкам естественной коммутации выходного напряжения. В канале сравнения формируют высокий уровень широтно-импульсного сигнала, если тактовый сигнал меньше сигнала задания, и низкий уровень, если тактовый сигнал больше сигнала задания. Формируют в выходном канале два сопряженных инверсных относительно друг друга выходных сигнала управления первого и второго ключей плеча преобразователя и одновременно с коммутацией модулирующих сигналов инвертируют сигналы выходного канала по отношению к широтно-импульсным сигналам канала сравнения. При этом в качестве тактового сигнала используют сигнал пилообразной формы. Для регулирования фазы тока сети относительно фазы напряжения сети производят регулирование заданной фазы тока сети таким образом, что осуществляют сдвиг тактового сигнала относительно сигнала перехода сетевого напряжения через ноль на заданное значение угла сдвига фаз, полученное с выхода регулятора фазы напряжения сети. При этом сдвиг фазы модулирующего сигнала относительно напряжения сети остается неизменным (см. В.В.Литовченко. 4q-S-Четырехквадрантный преобразователь электровозов переменного тока // Известия вузов. Электромеханика. 2000. №3. С.64-73).
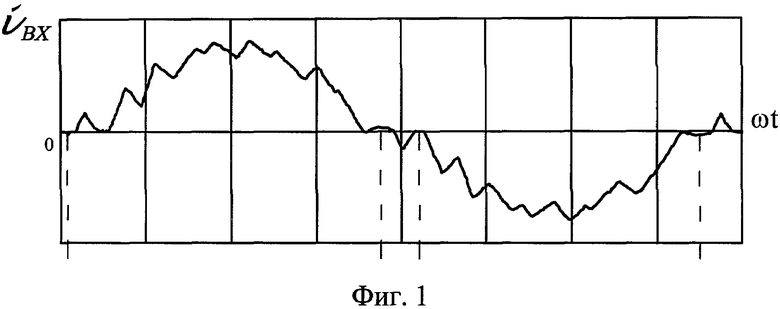
Этот способ имеет следующий недостаток. В используемом способе для регулирования фазы сетевого тока фазу тактового сигнала не изменяют, а поддерживают постоянной. На выходе регулятора производят сдвиг модулирующего сигнала. В результате этого (см. фиг.1) в области малых нагрузок (начало и конец каждого полупериода) наблюдается наличие области искажения - участка сетевого тока, на котором не происходит роста (спада) сетевого тока - режимов «закорачивание»-«разряд» конденсатора. На фигуре 1 эти участки показаны проекцией на ось абсцисс пунктирными линиями. Наличие в кривой сетевого тока прямолинейных участков искажает форму сетевого тока от требуемой формы - «аппроксимированная синусоида». В этой связи способ характеризуется низким значением коэффициента мощности и кпд как за период питающего напряжения, так и низким значением осредненного значения коэффициента мощности за продолжительный интервал времени работы преобразователя. Для реализации способа требуются значительные ресурсы системы управления, связанные с непрерывным контролем фазового сдвига сетевого тока, что негативно сказывается на быстродействии, надежности и устойчивости процесса регулирования преобразователем.
Задачей изобретения является разработка способа управления четырехквадрантным преобразователем, позволяющего повысить энергетические показатели преобразователя (кпд, коэффициент мощности) за счет улучшения коэффициента формы входного тока во всем диапазоне нагрузок. Второй по значимости задачей предлагаемого способа является необходимость уменьшения требуемого объема оперативной памяти микропроцессорной системы управления, повышение быстродействия и надежности устройства управления и процесса реализации программного обеспечения способа.
Поставленную задачу решают тем, что управление четырехквадрантным преобразователем осуществляют посредством асинхронной синусоидальной широтно-импульсной модуляции со сдвигом тактового и модулирующего сигналов относительно фазы напряжения сети. Способ состоит в том, что коммутацию силовых ключей преобразователя осуществляют в моменты времени, определяемые соотношением модулируемого напряжения и напряжения "развертки" генератора пилообразного напряжения на основании логических функций. При этом формирование импульсов управления осуществляют путем сравнения тактового сигнала и модулирующего синусоидального сигнала задания, изменяющегося по частоте и амплитуде, причем знак модулирующего сигнала изменяют на противоположный два раза за период в моменты времени, соответствующие точкам естественной коммутации выходного напряжения. В канале сравнения формируют высокий уровень широтно-импульсного сигнала, если тактовый сигнал меньше сигнала задания, и низкий уровень, если тактовый сигнал больше сигнала задания. Также формируют в выходном канале два сопряженных инверсных относительно друг друга выходных сигнала управления первого и второго ключей плеча преобразователя и одновременно с коммутацией модулирующих сигналов инвертируют сигналы выходного канала по отношению к широтно-импульсным сигналам канала сравнения, при этом в качестве тактового сигнала используют сигнал пилообразной формы. При формировании сигналов управления ключами преобразователя осуществляют смещение тактового сигнала по фазе относительно перехода сетевого напряжения через ноль.
В отличие от прототипа предлагаемый способ имеет новые признаки - при формировании сигналов управления ключами преобразователя осуществляют смещение тактового сигнала по фазе относительно перехода сетевого напряжения через ноль на такое же значение угла, что и модулирующий сигнал. То есть значение угла смещения тактового сигнала равно значению фазы модулирующего сигнала.
Таким образом, в предлагаемом способе сдвиг фазы модулирующего сигнала относительно напряжения сети является асинхронно изменяющимся в процессе регулирования.
Техническим результатом изобретения является возможность формирования кривой сетевого тока с улучшенной формой, близкой к синусоидальной, что способствует повышению коэффициента мощности и кпд четырехквадрантного преобразователя за счет улучшения коэффициента формы входного тока во всем диапазоне нагрузок. При этом значительно сокращается требуемый объем оперативной памяти микропроцессорной системы управления, повышается быстродействие и надежность устройства управления в сравнении с существующими способами управления.
Сущность изобретения поясняется фигурами 1-6.
На фиг.1 приведена временная диаграмма способа формирования сетевого тока методом синусоидальной ШИМ (прототипа).
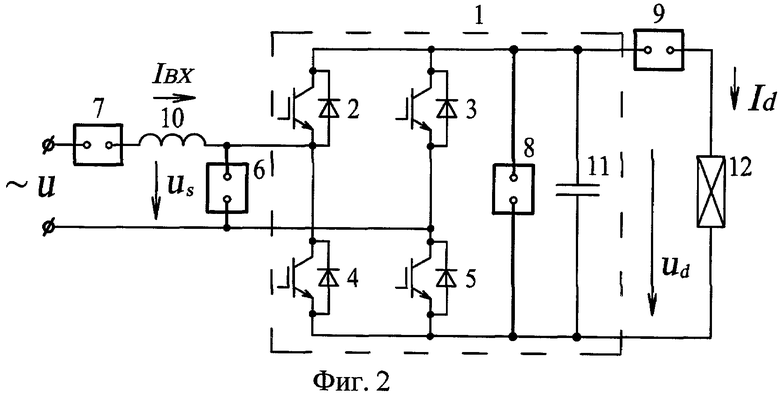
На фиг.2 приведена схема четырехквадрантного преобразователя.
На фиг.3 представлена структурная схема регулятора напряжения, реализующего предлагаемый способ управления.
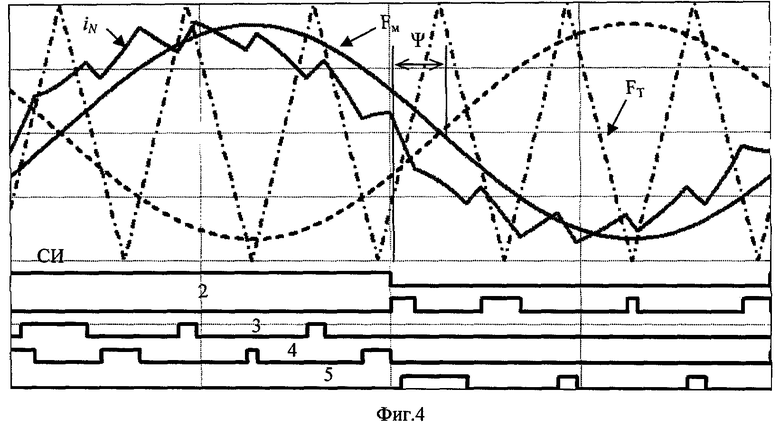
На фиг.4 приведены временные диаграммы формирования логики управления четырехквадрантного преобразователя при работе с предложенным способом управления.
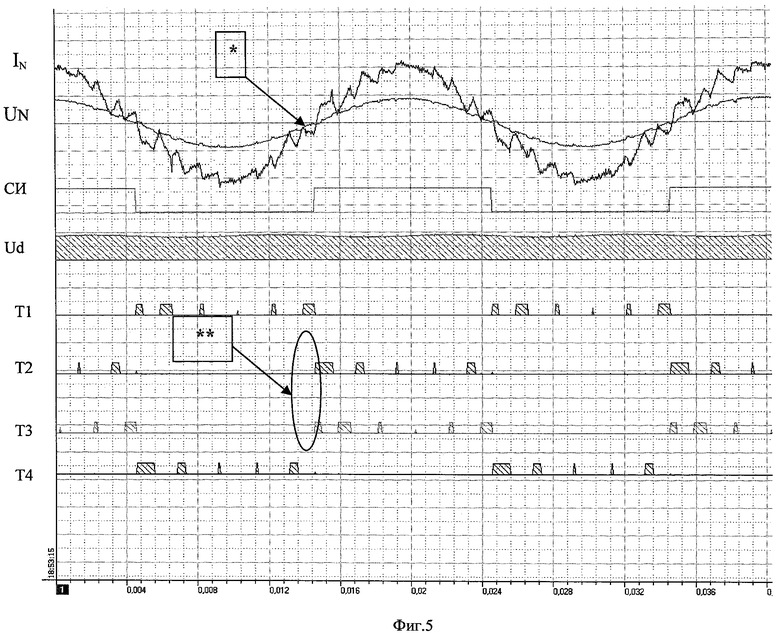
На фиг.5 приведены временные диаграммы входного тока и напряжений на входе и на нагрузке при работе преобразователя с предложенным способом.
На фиг.6 представлено устройство, реализующее предложенный способ управления.
В соответствии с фиг.2 четырехквадрантный преобразователь 1 содержит ключи (полупроводниковые приборы) 2, 3, 4 и 5, из которых ключи 2 и 3 - ключи положительного потенциала первого и второго плеча, а ключи 4 и 5 - ключи отрицательного потенциала первого и второго плеча преобразователя. Преобразователь 1 содержит датчик входного напряжения 6, подключенный параллельно входу преобразователя 1, датчик входного тока 7, датчик выходного напряжения 8, датчик выходного тока 9, подключенный на входе преобразователя 1 в цепи положительного потенциала нагрузки. Датчики 6, 7 и 8 предназначены для функций регулирования электрических процессов преобразователя, датчик 9 предназначен для функций контроля и защиты преобразователя от аварийных процессов. На входе четырехквадрантного преобразователя, в цепи переменного тока установлен реактивный (индуктивный) элемент, преимущественно дроссель 10. На выходе четырехквадрантного преобразователя, в цепи постоянного тока установлен набор емкостных элементов, преимущественно фильтровых конденсаторов большой емкости 11. Выходные сигналы датчиков 6, 7, 8 и 9 адресованы в систему управления и регулирования. Параллельно конденсатору 11 подключена нагрузка 12.
На фиг.3 представлена структурная схема регулятора напряжения, реализующего предлагаемый способ управления.
Предлагаемый способ управления четырехквадрантным преобразователем посредством асинхронной синусоидальной широтно-импульсной модуляции со сдвигом тактового и модулирующего сигналов относительно фазы напряжения сети реализуется в соответствии с фиг.3, согласно которой сигнал с выхода датчика напряжения 6 поступает в блок синхронизации (БС) 13, с выхода которого сигнал синхроимпульса поступает в блок синусоидальной широтно-импульной модуляции (ШИМС) 14. Сигнал с выхода датчика тока 7 поступает на вход узла сравнения 15, на другой вход которого поступает сигнал с датчика входного напряжения 6. С выхода узла сравнения выдается сигнал фактического рассогласования фазы Δφ входного тока и входного напряжения, поступающий в интегральный регулятор фазового сдвига РФ (блок 16). С выхода регулятора фазового сдвига 16 интегрированный сигнал коррекции фазы Ψ, используемый в качестве значения сдвига тактового сигнала по фазе относительно перехода сетевого напряжения через ноль на такое же значение угла, что и модулирующий сигнал, поступает на вход генератора импульсов пилообразной формы (ГИ) - блок 17. На выходе генератора импульсов 17 вырабатывается непрерывный сигнал, смещенный относительно синхроимпульса на угол Ψ. С выхода блока 17 тактовый сигнал FT треугольной формы поступает в блок ШИМС 14. Одновременно с этим, с выхода блока РФ 16 сигнал Ψ поступает на вход функционального преобразователя (блок 18). На другой вход ФП 18 поступает сигнал синхроимпульса СИ с выхода блока БС 13.
Сигнал с выхода датчика напряжения 9 поступает в узел сравнения 19, на другой вход которого поступает сигнал с задатчика входного напряжения. Задатчиком входного напряжения может служить сигнал системы управления преобразователем uз, определяющий необходимое в данный момент значение напряжения звена постоянного напряжения (на нагрузке). На выходе узла сравнения выдается сигнал рассогласования Δu между заданным uз и фактическим ud напряжением, поступающий затем в регулятор напряжения РН (блок 20) для формирования сигнала управляющего напряжения uупр. РН 20 реализован по принципу пропорционально-интегрального регулятора (ПИ-регулятор), но в ряде случаев может быть реализован и на основе другого типового регулятора. С выхода блока 20 сигнал управляющего напряжения uупр поступает на вход блока ФП 18. Используя информацию входных сигналов, поступающих с блоков 13, 16 и 20 на вход блока ФП 18, с выхода ФП 18 на вход блока ШИМС 14 поступает модулирующий сигнал FM.
В рассматриваемом способе модулирующий сигнал описывается функцией
FM(t)=A sin ωNt,
где А - амплитуда сигнала;
ωN - циклическая частота;
t - абсолютное время.
Треугольный тактовый сигнал описывается функцией 
где В - амплитуда сигнала;
ωT - тактовая частота.
В блоке ШИМС 14 производится сравнение сигналов FT, FM и коррекция фазы формируемого напряжения uS на входе преобразователя 1 с учетом сигнала синхроимпульса СИ.
Назначение блоков, представленных на фиг.3:
13 (БС) - аппаратный блок синхронизации, формирующий из аналогового сигнала входного напряжения цифровой сигнал прямоугольной формы, фронты которого совпадают с моментами, когда входное напряжение uS=0;
14 (ШИМС) - программный блок синусоидальной широтно-импульсной модуляции, в котором определяется ширина управляющих импульсов посредством наложения модулирующего сигнала на тактовый;
16 (РФ) - интегральный регулятор фазового сдвига, формирующий программно, на основании рассогласования фаз входного тока и напряжения, угол сдвига модулирующего и тактового сигналов Ψ в тактах таймера;
17 (ГИ) - программный генератор импульсов пилообразной формы, выходом которого является тактовый сигнал заданной частоты и амплитуды, сдвинутый относительно СИ на Ψ;
18 (ФП) - программный функциональный преобразователь, который на выходе формирует модулирующий синусоидальный сигнал, сдвинутый относительно СИ на Ψ;
20 (РН) - программный пропорционально-интегральный регулятор напряжения, который по рассогласованию между заданным и действительным значениями выходного напряжения определяет амплитуду модулирующей синусоиды;
21 (РИ) - распределитель импульсов. Аппаратно разрешает прохождение импульсов управления на соответствующие плечи управляемого моста в зависимости от знака полупериода входного напряжения.
На фигуре 4 представлена типовая диаграмма формирования сигналов управления преобразователем по предлагаемому способу.
Как видно из представленной зависимости, при сдвиге на угол Ψ только одной модулирующей функции одновременное включение двух транзисторов плеча преобразователя начинается от середины тактового сигнала. При синхронном сдвиге тактового FT и модулирующего FM сигналов представляется возможным формировать импульсы управления обоими транзисторами одновременно в моменты перехода сетевого напряжения через 0. Таким образом, при напряжении сети, близком к нулю, за счет напряжения промежуточного звена ud возможно обеспечить синусоидальную форму входного тока iN.
Сформированная таким образом в блоке ШИМС 14 последовательность управляющих сигналов поступает на распределитель импульсов РИ 21. На другой вход РИ 21 поступает сигнал синхроимпульса СИ с блока БС 13.
РИ 21 распределяет сформированные импульсы управления для каждого из четырех драйверов ключей 2, 3, 4 и 5 преобразователя 1.
На фиг.5 приведены временные диаграммы преобразуемого тока и напряжения при работе преобразователя с предложенным способом. Из диаграмм следует, что благодаря новому техническому решению - смещению тактового сигнала по фазе относительно перехода сетевого напряжения через ноль на такое же значение угла, что и модулирующий сигнал, наблюдается улучшение формы потребляемого тока.
Как видно из экспериментальной осциллограммы, полученной на испытательном стенде четырехквадрантного преобразователя, управляемого с предлагаемым способом, в моменты времени (отмеченные указателем *), когда входное напряжение uS равно нолю, импульсы подаются одновременно на два управляемых ключа (указатель **). Тем самым напряжение uS на индуктивности 10 складывается с выходным напряжением ud, что приводит к более резкому увеличению входного тока в рассматриваемые моменты. Таким образом улучшается форма входного тока и, как следствие, повышается кпд преобразования энергии.
Способ реализуют с помощью устройства (фиг.6), состоящего из блока таймеров 22, процессора 23, оперативного запоминающего устройства (ОЗУ) 24, постоянного запоминающего устройства (ПЗУ) 25, аналого-цифрового преобразователя (АЦП) 26, цифроаналогового преобразователя (ЦАП) 27, блока компараторов 28, блока защиты 29, блока драйверов 30, управляющих четырехквадрантным преобразователем 1, имеющим датчик для измерения входного тока IBX и датчик выходного напряжения Ud, выходы которых соединены с входами АЦП 26, и синхронизатора 31.
Датчики тока 7 и напряжения 8 на фигуре не показаны.
Четырехквадрантный преобразователь 1 и синхронизатор 31, предназначенный для определения полярности и моментов перехода через ноль сетевого напряжения, запитаны переменным напряжением u.
Входы-выходы таймера 22, процессора 23, ОЗУ 24, ПЗУ 25, выход АЦП 26, ЦАП 27, блока компараторов 28, блока защиты 29 и входы блока драйверов 30 объединены шиной адресов-данных 32.
Вход синхронизатора 31 соединен со входом сброса блока таймеров 22 и шиной прерывания процессора 23.
Применение данного способа формирования сетевого тока позволяет формировать кривую сетевого тока с улучшенной формой, близкой к синусоидальной, что способствует повышению коэффициента мощности и кпд преобразователя за счет улучшения коэффициента формы входного тока во всем диапазоне нагрузок. При этом значительно сокращается требуемый объем оперативной памяти микропроцессорной системы управления, повышается быстродействие и надежность устройства управления в сравнении с существующими способами управления.
Как показали результаты экспериментальных исследований, применение указанного способа асинхронного управления в большинстве случаев предпочтительнее по сравнению с применением классического способа управления посредством синусоидальной ШИМ, поскольку повышается качество сетевого тока и требуются меньшие аппаратные затраты на реализацию способа.
По энергетическим показателям новый способ превосходит способ с классической широтно-импульсной модуляцией напряжения. При этом ресурсы устройства, реализующего способ асинхронного управления по аппаратной части, могут быть значительно проще. Также существенно проще и программная реализация способа, а показатели надежности выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЁХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ФОРМИРОВАНИЕМ МОДУЛИРУЮЩЕГО СИГНАЛА | 2008 |
|
RU2396690C1 |
| СПОСОБ ФОРМИРОВАНИЯ ШИРОТНО-ИМПУЛЬСНЫХ СИГНАЛОВ УПРАВЛЕНИЯ АВТОНОМНОГО ИНВЕРТОРА | 2008 |
|
RU2389128C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРОВОЗА | 2011 |
|
RU2464621C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ВЫЧИСЛЕНИЕМ ФАЗ КОММУТАЦИИ И МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2327276C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2620129C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАЛЛЕЛЬНОЙ РАБОТОЙ ЧЕТЫРЕХКВАДРАНТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2005 |
|
RU2305361C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ МОСТОВЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2007 |
|
RU2379819C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЧАСТОТЫ | 2003 |
|
RU2269860C2 |
| СПОСОБ ФОРМИРОВАНИЯ ШИРОТНО-ИМПУЛЬСНЫХ СИГНАЛОВ УПРАВЛЕНИЯ АВТОНОМНОГО ИНВЕРТОРА | 2007 |
|
RU2326486C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ | 2014 |
|
RU2556874C1 |

Изобретение относится к области электротехники и может быть использовано в тяговом приводе электроподвижного состава с двигателями постоянного тока. Технический результат заключается в возможности формирования кривой сетевого тока с улучшенной формой, близкой к синусоидальной, что способствует повышению коэффициента мощности и кпд четырехквадрантного преобразователя за счет улучшения коэффициента формы входного тока во всем диапазоне нагрузок. Способ асинхронного управления четырехквадрантным преобразователем осуществляют посредством асинхронной синусоидальной широтно-импульсной модуляции со сдвигом тактового и модулирующего сигналов относительно фазы напряжения сети. Коммутацию силовых ключей преобразователя осуществляют в моменты времени, определяемые соотношением модулируемого напряжения и напряжения "развертки" генератора пилообразного напряжения на основании логических функций. Формирование импульсов управления осуществляют путем сравнения тактового сигнала и модулирующего синусоидального сигнала задания, изменяющегося по частоте и амплитуде: знак модулирующего сигнала изменяют на противоположный два раза за период в моменты времени, соответствующие точкам естественной коммутации выходного напряжения. В канале сравнения формируют высокий уровень широтно-импульсного сигнала, если тактовый сигнал меньше сигнала задания, и низкий уровень, если тактовый сигнал больше сигнала задания. В выходном канале формируют два сопряженных инверсных относительно друг друга выходных сигнала управления первого и второго ключей плеча преобразователя и одновременно с коммутацией модулирующих сигналов инвертируют сигналы выходного канала по отношению к широтно-импульсным сигналам канала сравнения. В качестве тактового сигнала используют сигнал пилообразной формы. При формировании сигналов управления ключами преобразователя осуществляют смещение тактового сигнала по фазе относительно перехода сетевого напряжения через ноль. Значение угла смещения тактового сигнала равно значению фазы модулирующего сигнала. Таким образом, сдвиг фазы модулирующего сигнала относительно напряжения сети является асинхронно изменяющимся в процессе регулирования. 6 ил.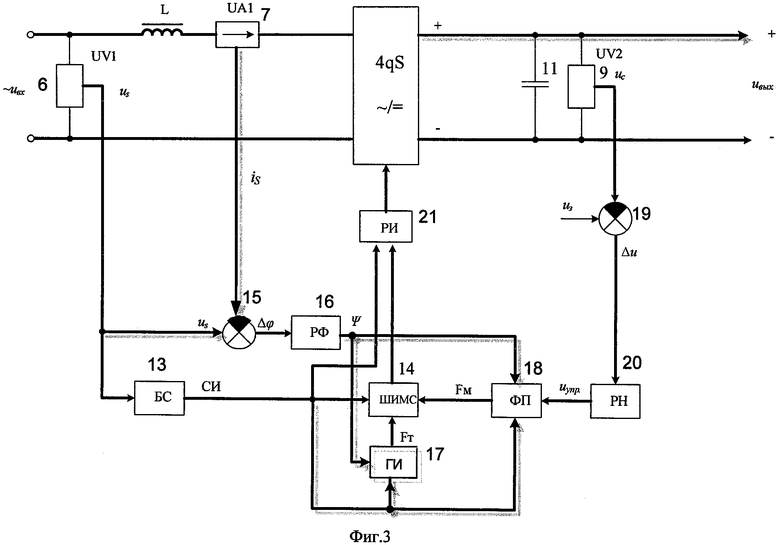
Способ асинхронного управления четырехквадрантным преобразователем, заключающийся в том, что коммутацию силовых ключей преобразователя осуществляют в моменты времени, определяемые соотношением модулируемого напряжения и напряжения "развертки" генератора пилообразного напряжения на основании логических функций, при этом формирование импульсов управления осуществляют путем сравнения тактового сигнала и модулирующего синусоидального сигнала задания, изменяющегося по частоте и амплитуде, причем знак модулирующего сигнала изменяют на противоположный два раза за период в моменты времени, соответствующие точкам естественной коммутации выходного напряжения, в канале сравнения формируют высокий уровень широтно-импульсного сигнала, если тактовый сигнал меньше сигнала задания, и низкий уровень, если тактовый сигнал больше сигнала задания, при этом формируют в выходном канале два сопряженных инверсных относительно друг друга выходных сигнала управления первого и второго ключей плеча преобразователя и одновременно с коммутацией модулирующих сигналов инвертируют сигналы выходного канала по отношению к широтно-импульсным сигналам канала сравнения, при этом в качестве тактового сигнала используют сигнал пилообразной формы, причем при формировании сигналов управления ключами преобразователя осуществляют смещение тактового сигнала по фазе относительно перехода сетевого напряжения через ноль, отличающийся тем, что смещение тактового сигнала по фазе относительно перехода сетевого напряжения через ноль осуществляют на такое же значение угла, что и модулирующий сигнал.
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЕХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2315415C2 |
| СПОСОБ УПРАВЛЕНИЯ ЧЕТЫРЁХКВАДРАНТНЫМ ПРЕОБРАЗОВАТЕЛЕМ С ФОРМИРОВАНИЕМ МОДУЛИРУЮЩЕГО СИГНАЛА | 2008 |
|
RU2396690C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧЕТЫРЕХКВАДРАНТНОГО УСТАНОВОЧНОГО ОРГАНА, ВЫПОЛНЯЮЩЕГО РОЛЬ ПРЕОБРАЗОВАТЕЛЯ ТОКА СЕТИ | 1995 |
|
RU2145726C1 |
| US 7248489 B2, 24.07.2007 | |||
| JP 63136968 А, 06.07.1994 | |||
| Упругая муфта | 1989 |
|
SU1668768A1 |

