Область техники
Изобретение относится к способу регулирования скорости перемещения и расстояния между объектами, которые транспортируются непрерывно, последовательно и случайным образом вдоль заданной траектории.
Изобретение также относится к устройству, в котором используется упомянутый способ.
Способ и устройство, соответствующие изобретению, можно использовать, в частности, во всех случаях, когда желательно осуществлять контроль, обработку или сортировку унитарных деталей или сборок деталей, которые подаются непрерывно в случайном потоке. В самом деле, регулирование движения, обеспечиваемое посредством изобретения, можно использовать для идентификации деталей или сборок деталей, например, путем маркировки, подсчета, взвешивания и тд
Предпочтительно изобретение предназначено для регулирования движения таблеток ядерного топлива при их изготовлении с целью проведения динамической сортировки упомянутых таблеток по размеру посредством лазерного считывания.
Предшествующий уровень техники
При изготовлении таблеток ядерного топлива, используемых в тепловыделяющих сборках, предназначенных для ядерных реакторов, эти таблетки шлифуют для достижения некоторого точного размера. За этой операцией шлифования следует сортировка по размеру, которую проводят динамически посредством лазерного считывания.
Поскольку лазерное считывание и сортировку осуществляют в оптимальном режиме, скорость подачи таблеток и расстояние между ними должны быть постоянными. Это требует преобразования первоначально непрерывной, но случайной транспортировки в транспортировку, равномерную как по расстоянию, так и по скорости.
В настоящее время эту функцию выполняет вибрирующая направляющая. Однако это устройство, известное в данной области техники, обуславливает ряд недостатков, которые желательно устранить.
Так, наладка вибрирующей направляющей требует высокой точности и подвержена сбоям со временем.
Помимо этого, такое устройство не исключает трение, которое сопровождается флуктуациями, зависящими от различных типов изготавливаемых таблеток.
Краткое изложение сущности изобретения
Изобретение относится, в частности, к способу, предназначенному для регулирования расстояния во времени и пространстве между такими объектами, как таблетки ядерного топлива, первоначально транспортируемыми непрерывно, но случайно, не требующему сложной наладки, подверженной уходам, и позволяющему избавиться от влияния любых явлений трения.
В соответствии с изобретением, этот результат достигается посредством способа регулирования расстояния между объектами, первоначально транспортируемыми непрерывно, последовательно и случайным образом вдоль первой траектории, а также регулирования скорости этих объектов, причем упомянутый способ отличается тем, что включает в себя следующие этапы, на которых
фиксируют прибытие, по меньшей мере, первого из объектов к упору, находящемуся на первой траектории,
осуществляют циклическое переключение движения первого объекта в поперечном направлении относительно первой траектории после обнаружения прибытия первого объекта к упору, чтобы обеспечить перенос этого объекта в положение между двумя последовательными разделяющими конструктивными элементами, принадлежащими средствам привода объектов вдоль второй траектории,
включают средства привода для обеспечения движения первого объекта вдоль второй траектории на расстояние, равное расстоянию между последовательными разделяющими конструктивными элементами, и повторяют вышеупомянутые этапы для каждого из объектов.
Совместное использование упора, преимущественно неподвижного, средств привода, оснащенных равноотстоящими друг от друга разделяющими конструктивными элементами, и средств для переноса в положение между двумя разделяющими конструктивными элементами объекта, оказывающегося возле упора, дает возможность регулировать расстояние между объектами и скорость их перемещения без какой-либо дополнительной наладки. Следовательно, не возникает проблемы сбоя наладки со временем. Кроме того, эта схема дает возможность избежать явлений флуктуации трения в зависимости от типа изготавливаемых таблеток.
В предпочтительном конкретном варианте осуществления изобретения осуществляют перемещение первого объекта в поперечном направлении за счет вращения циклически вращающегося устройства, такого как кулачок или барабан, вокруг оси, приблизительно параллельной первой траектории.
Кроме того, осуществляют перемещение первого объекта преимущественно в поперечном направлении с возможностью его переноса на имеющую V-образное поперечное сечение направляющую скольжения, ориентированную вдоль второй траектории.
Преимущественно используют средства привода, которые содержат бесконечную ленту, оснащенную равноотстоящими друг от друга пальцами или штырями, образующими разделяющие конструктивные элементы.
В соответствии с одним аспектом изобретения, средства привода включают сразу же после переноса первого объекта в положение между двумя последовательными разделяющими конструктивными элементами. С этой целью для управления обоими движениями используют автономный электродвигатель, объединенный с делительным средством.
Изобретение также относится к устройству для осуществления способа.
Более конкретно изобретение относится к устройству для регулирования расстояния между объектами, первоначально транспортируемыми непрерывно, последовательно и случайным образом по транспортирующему средству, ограничивающему первую заданную траекторию, а также для регулирования скорости этих объектов, причем упомянутое устройство отличается тем, что оно содержит упор, находящийся на первой траектории, средство для обнаружения прибытия, по меньшей мере, первого из объектов, оказывающегося около упора, средства привода, оснащенные разделяющими конструктивными элементами, равноотстоящими друг от друга и выполненными с возможностью привода упомянутых объектов вдоль второй траектории, движущие средства, выполненные с возможностью обеспечения движения первого объекта в циклическом режиме в поперечном направлении относительно первой траектории в ответ на сигнал, испускаемый обнаруживающими средствами, для переноса упомянутого объекта в положение между двумя последовательными разделяющими конструктивными элементами, и средства для управления движением средств привода вперед на расстояние, равное расстоянию между двумя разделяющими конструктивными элементами, после каждого использования движущих средств.
Краткое описание чертежей
Ниже, в качестве неограничительного примера приведено описание предпочтительного конкретного варианта осуществления изобретения со ссылками на прилагаемые чертежи, где
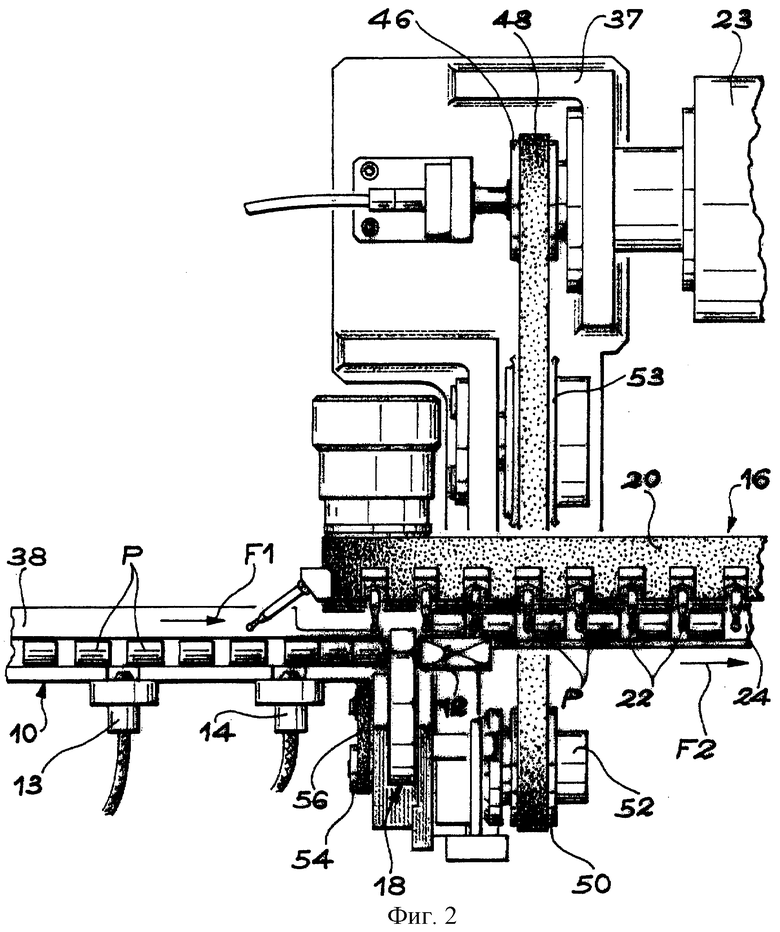
фиг.1 изображает в перспективе и схематически устройство для регулирования расстояния в соответствии с изобретением;
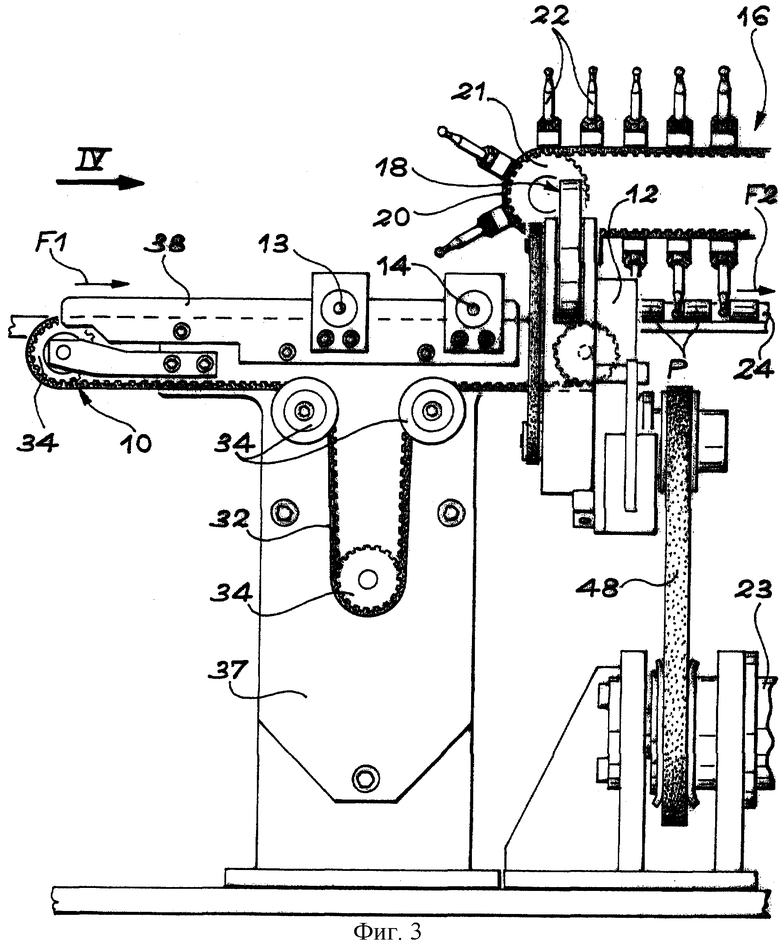
фиг.2 - вид сверху на устройство, изображенное на фиг.1;
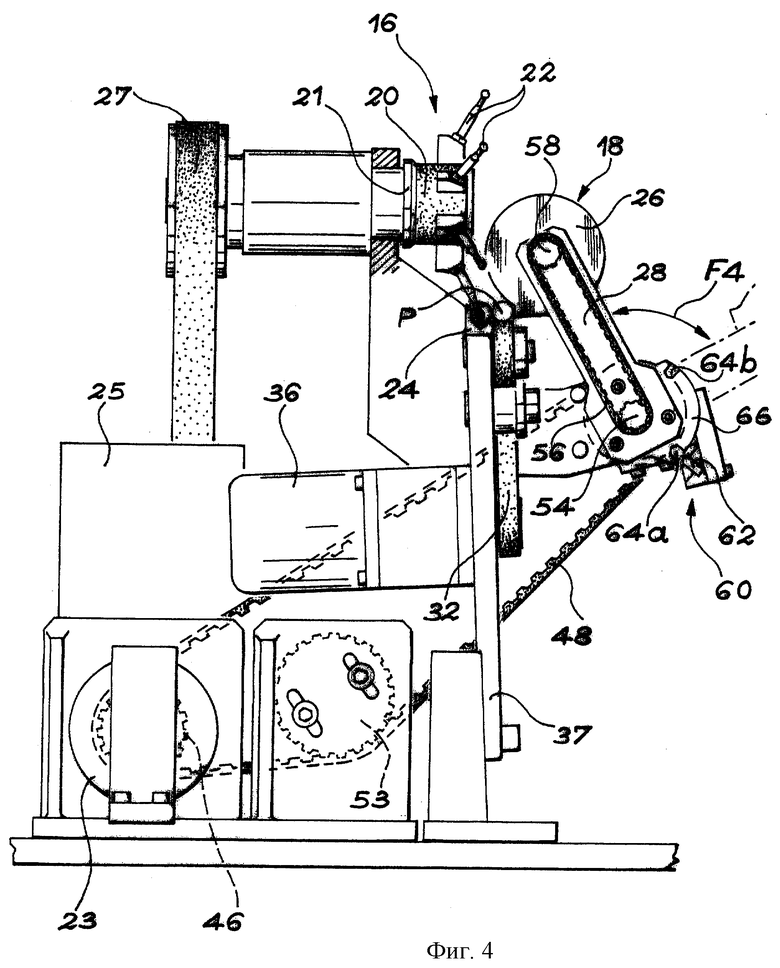
фиг.3 - вид сбоку на устройство, изображенное на фиг.1;
фиг.4 - вид по стрелке IV, показанной на фиг.3.
Подробное описание предпочтительного конкретного варианта осуществления изобретения
На фиг.1 схематически изображено устройство для регулирования расстояния и скорости в соответствии с изобретением. Более конкретно представленное устройство применяется для регулирования расстояния между таблетками Р ядерного топлива, а также скорости их перемещения. В этом случае такая регулировка предназначена для обеспечения непрерывной сортировки по размерам таблеток, проводимой далее в технологической цепочке посредством лазерного считывания в оптимальных условиях. Как уже упоминалось, в рамках объема притязаний изобретения можно использовать устройство, соответствующее изобретению, для регулирования расстояния между деталями или сборками деталей любого другого вида, а также скорости их перемещения.
Таблетки Р, для которых осуществляют регулирование расстояния и скорости, поступают последовательно, по непрерывной, но случайной траектории вдоль верхней горизонтальной поверхности транспортирующего средства 10.
Более конкретно, как показано, в частности, на фиг.2-4, транспортирующее средство 10 содержит бесконечную синхронную ленту 32, установленную на синхронных шкивах 34. Один из этих синхронных шкивов установлен на выходном валу электродвигателя 36 с понижающим редуктором (фиг.4). Синхронные шкивы 34 и электродвигатель 36 с понижающим редуктором опираются на раму 37. Транспортирующее средство 10 также содержит боковые направляющие 38, находящиеся у каждого края конца верхней горизонтальной ветви ленты 32, и при этом промежуток между ними несколько больше, чем диаметр таблеток Р.
Таблетки Р, имеющие цилиндрическую форму, находятся на верхней стороне ленты 32 между направляющими 38, так что их продольная ось ориентирована в направлении движения транспортирующего средства 10. Это направление, показанное стрелкой F1 на фиг.1-3, определяет первоначальную траекторию движения таблеток Р.
Устройство для регулирования расстояния и скорости согласно изобретению содержит механический упор 12, находящийся на первоначальной траектории движения таблеток Р над соответствующим концом транспортирующего средства 10. Механический упор 12 является неподвижным, опирается на раму 37 и находится на продолжении верхней стороны ленты 32.
Одна из боковых направляющих 38 содержит два датчика 13 и 14 наличия (фиг.2 и 3), смещенные друг относительно друга в направлении движения верхней стороны ленты 32. Упомянутые датчики наличия образуют обнаруживающие средства. Каждый из них может, в частности, состоять из фотоэлемента, микровыключателя или другого устройства.
Обнаруживающее средство - датчик 13 - расположен дальше от механического упора 12 и предназначен для обнаружения затора таблеток Р около упора 12, т.е. ситуации, когда количество таблеток, оказывающихся около упора, превышает предварительно определенное значение. Это значение зависит от расстояния, которое отделяет датчик 13 от упора 12. В конкретном варианте осуществления, представленном в качестве примера на чертежах, это значение равно восьми.
Обнаруживающее средство - датчик 14 - расположен ближе к механическому упору 12 и предназначен для обнаружения наличия около упора минимального количества таблеток. Это минимальное количество таблеток равно, по меньшей мере, единице. В конкретном варианте осуществления, изображенном в качестве примера на чертежах, это минимальное количество равно трем. Как правило, наличие этого минимального количества таблеток, находящихся около упора 12, определяет выполнение устройства, соответствующего изобретению, что можно увидеть в дальнейшем.
Когда перед обнаруживающими датчиками 13 и/или 14 имеется таблетка Р, упомянутые датчики выдают электрический сигнал, который передается в центральный блок управления (не показан). Постоянный сигнал на выходе обнаруживающего средства - датчика 13 - свидетельствует о существовании затора. Постоянный сигнал на выходе обнаруживающего средства - датчика 14 - обеспечивает использование других компонентов предлагаемого устройства.
Устройство для регулирования расстояния и скорости согласно изобретению также содержит средство 16 привода, предназначенное для перемещения таблеток Р друг за другом, с постоянным расстоянием между ними, вдоль второй заданной траектории вместе с движущими средствами 18, используемыми для переноса каждой из таблеток последовательно с первой траектории на вторую траекторию.
Более конкретно средство 16 привода содержит бесконечную синхронную ленту 20, оснащенную разделяющими элементами 22, например пальцами или штырями, на ее внешней поверхности. Лента 20 установлена на синхронных шкивах 21, причем на чертежах показан лишь один из этих шкивов.
Как показано, в частности, на фиг.4, один из синхронных шкивов 21 вращается выходным валом редукторного электродвигателя 23 через посредство шагового механизма 25, содержащего коническую шестерню, и синхронной ленты 27, находящейся в зацепление с двумя синхронными шкивами, установленными соответственно на выходном валу шагового механизма и на валу, несущем синхронный шкив 21, служащий для привода ленты 20. Электродвигатель 23 с редуктором, шаговый механизм 25 и синхронный шкив 21 опираются на раму 37.
Под нижней горизонтальной ветвью бесконечной ленты 20 находится имеющая V-образное поперечное сечение направляющая 24 скольжения, проходящая приблизительно в горизонтальном направлении, которое соответствует упомянутой второй траектории. Более конкретно верхняя фасонная поверхность, имеющая V-образное поперечное сечение направляющей 24 скольжения, расположена на таком уровне, что таблетки Р, находящиеся на упомянутой поверхности, располагаются приблизительно на том же уровне, что и таблетки, находящиеся на транспортирующем средстве 10.
В изображенном конкретном варианте осуществления вторая траектория приблизительно параллельна первой траектории, определенной транспортирующим средством 10, и в поперечном направлении смещена относительно упомянутого средства, оставаясь расположенной приблизительно в той же горизонтальной плоскости.
Более конкретно входная концевая часть направляющей 24 скольжения расположена за выходной концевой частью транспортирующего средства 10 рядом с упором 12. Длины упомянутых входной и выходной концевых частей равны длине одной таблетки Р, которая должна циркулировать в устройстве. Вне пределов этой входной концевой части направляющая 24 скольжения проходит параллельно транспортирующему средству 10 на некотором расстоянии от упомянутого средства.
Бесконечная лента 20 расположена над направляющей 24 скольжения, причем ее нижняя горизонтальная ветвь ориентирована параллельно упомянутой направляющей скольжения, а сама она проходит на расстоянии, несколько превышающем диаметр таблеток.
Более конкретно с учетом требований к пространству, занимаемому движущими средствами 18, лента 20 несколько смещена относительно направляющей 24 скольжения в поперечном направлении, противоположном направлению к транспортирующему средству 10. Кроме того, разделяющие элементы 22 ориентированы под углом к направлению направляющей 24 скольжения так, что их концы располагаются непосредственно над направляющей 24 скольжения, когда эти элементы 22 обращены выступающими концами вниз. Таким образом, каждый из разделяющих элементов 22, несомых нижней ветвью ленты 20, оказывается у задней поверхности таблетки Р, когда бесконечная лента 20 движется в направлении, соответствующем подаче таблеток. Это направление движения показано стрелками F2 на фиг.1-3.
Грубо говоря, расстояние между двумя разделяющими элементами 22 больше, чем длина одной таблетки Р, но меньше, чем длина двух таблеток. В результате между двумя последовательными разделяющими элементами может разместиться только одна таблетка Р.
В конкретном варианте осуществления, показанном на чертежах, движущие средства 18 содержат циклически вращающееся устройство 26, такое как кулачок или барабан, при этом ось 30 его вращения ориентирована параллельно первой и второй траекториям, направления которых показаны стрелками F1 и F2 на чертежах.
Циклически вращающееся устройство 26 установлено на одном конце плеча 28, противоположный конец которого поддерживается рамой 37 и способен поворачиваться вокруг горизонтальной оси 42, параллельной оси 30.
Устройство 26 представлено в виде диска малого диаметра и толщины меньшей, чем длина одной таблетки Р. Периферийная кромка упомянутого диска содержит единственный зуб 27, который имеет рабочую поверхность с малым радиусом кривизны, сравнимым с радиусом кривизны таблеток Р, и нерабочую поверхность, проходящую приблизительно по касательной к периферийной кромке диска.
Как показано на чертежах, в рабочем положении, обычно занимаемом плечом 28, устройство 26 располагается над верхней ветвью транспортирующего средства 10 напротив выходной концевой части упомянутого транспортирующего средства. Более конкретно оно смещено относительно транспортирующего средства 10 в поперечном направлении, противоположном направлению к ленте 20.
Когда диск 26 вращается вокруг своей оси 30 в направлении, соответствующем стрелке F3, показанной на фиг.1, рабочая поверхность зуба 27 оказывается около таблетки Р, которой упор 12 не позволяет двигаться на транспортирующем средстве 10, так что обеспечивается возможность переноса упомянутой таблетки в поперечном направлении на направляющую 24 скольжения. Тогда таблетка, движущаяся таким образом, оказывается между двумя последовательными разделяющими конструктивными элементами 22 средств 16 привода.
Как более подробно показано на фиг.2-4, циклически вращающееся устройство 26 вращается редукторным электродвигателем 23 посредством механизма ленты. В частности, выходной вал электродвигателя 23 осуществляет привод синхронного шкива 46, введенного в зацепление с бесконечной синхронной лентой 48. Эта синхронная лента 48 также введена в зацепление с синхронным шкивом 50, установленным на валу 52, отцентрированном с осью 42 поворота плеча 28. Как правило, с синхронной лентой 48 также может быть введен в зацепление синхронный шкив 53, задающий натяжение.
На валу 52 также сидит второй синхронный шкив 54. Как с синхронным шкивом 54, так и с синхронным шкивом 58 введена в зацепление бесконечная синхронная лента 56. Синхронных шкив 58 в свою очередь отцентрирован по оси 30 вращения циклически вращающегося устройства 26 и установлен на валу, посредством которого упомянутое устройство связано плечом 28.
Вышеописанная конструкция дает возможность осуществлять циклическое управление вращением устройства 26 на один оборот вокруг его оси 30 во время использования электродвигателя 23 с редуктором. При условии, что электродвигатель 23 с редуктором также осуществляет привод ленты 20, как описано выше, каждое вращение на один оборот устройства 26 в направлении стрелки F3 сопровождается продвижением ленты 20 вперед на один шаг в направлении стрелки F2. Это движение ленты 20 вперед на один шаг на самом деле осуществляется посредством движения упомянутой ленты на расстояние, равное расстоянию между двумя последовательными разделяющими элементами 22. Наличие шагового механизма 25 в механической цепи, связывающей двигатель 23 с редуктором и ленту 20, обеспечивает переключение движения ленты 20 сразу же после того, как таблетка Р сталкивается в положение между двумя последовательными разделяющими элементами 22 упомянутой ленты.
В качестве иллюстративного и неограничительного примера изобретения отметим, что в случае таблеток Р длиной 13 мм, транспортируемых транспортирующим средством 10 со скоростью 40 мм/с, регулярная подача таблеток по направляющей 24 скольжения происходит со скоростью 1,5 таблетки в секунду посредством осуществляемого за 0,666 с управляемого поворота на 360° выходного вала электродвигателя 23. Во время первой части упомянутого поворота, продолжительность которого составляет, например, 0,055 с, устройство 26 толкает таблетку, первоначально находящуюся около упора 12, в поперечном направлении на направляющую 24 скольжения. По окончании упомянутого первого периода и в течение периода продолжительностью, например, 0,444 с лента 20 передвигается вперед, например, на 20 мм.
Шаговый механизм, обозначенный позицией 60 на фиг.4, дает возможность поддерживать плечо 28 обычно в рабочем положении, изображенном на чертежах. Этот шаговый механизм содержит отводимый палец 62, установленный на раме 37, и два отверстия 64а и 64b, образованные во фланце 66, центрированном на оси 42 и прикрепленном к плечу 28.
Когда палец 62 расположен в отверстии 64а, плечо 28 занимает свое рабочее положение, при этом вращение устройства 26 приводит к сталкиванию таблетки Р с транспортирующего устройства 10 на направляющую 24 скольжения. После того, как палец 26 вышел из отверстия 64а, плечо может повернуться вокруг своей оси 42, чтобы отверстие 64b расположилось напротив пальца. После этого упругое приспособление (не показано), например пружина возврата, вталкивает палец 62 в отверстие 64b, чтобы удержать плечо 28 в так называемом положении «обслуживание», при этом устройство 26 больше не расположено над транспортирующим средством 10. Переключение рычага 28 между рабочим положением и положением «обслуживание» условно показано стрелками F4 на фиг.1-4. В рамках объема притязаний изобретения этим переключением, а также включением шагового механизма 60 можно управлять вручную, как показано, или с помощью средств дистанционного управления.
Положение «обслуживание» плеча 28 можно использовать, в частности, когда происходит такое событие, как затор таблеток Р около упора 12.
Когда установка включена, плечо 28 занимает свое рабочее положение. Затем таблетки Р последовательно транспортируются транспортирующим средством 10 в потоке, который является случайным, в частности, применительно к расстоянию между ними. Наличие предварительно заданного количества таблеток Р, находящихся около упора 12, сразу же выявляется обнаруживающим средством - датчиком 14. Затем упомянутое обнаруживающее средство выдает сигнал обнаружения, который немедленно передается в центральный процессор, ЦП (не показан). Когда этот сигнал принимается, ЦП дает команду на полный оборот циклически вращающегося устройства 26. Это вращение устройства 26 приводит к тому, что таблетка Р, которая находилась около упора 12, сталкивается в поперечном направлении на направляющую 24 скольжения. Более конкретно упомянутая таблетка Р затем вводится между двумя последовательными разделяющими элементами 22 средства 16 привода. Таким образом, таблетки Р вводятся друг за другом между последовательными разделяющими элементами 22, несомыми синхронной лентой 20, которая движется шаг за шагом под действием электродвигателя 23 с редуктором.
Как уже отмечалось, плечо 28 переключается в положение «обслуживание», например, в случае неожиданного затора в устройстве.
Вышеописанное устройство гарантирует подачу таблеток Р через постоянные интервалы по направляющей 24 скольжения. Следовательно, дальше в технологической цепочке можно проводить операцию контроля, обработки или сортировки, например, посредством лазерного считывания. Благодаря тому, что подача таблеток с постоянным интервалом во времени и пространстве не требует никаких наладок, исключаются недостатки известного уровня техники, связанные с использованием вибрирующей направляющей.
Естественно, изобретение не сводится к конкретному варианту осуществления, описанному выше в качестве примера. Так, вращающееся устройство 26 можно, в частности, заменить устройством типа толкателя, обеспечивающим скольжение и возвратно-поступательное движение вдоль направления, приблизительно перпендикулярного траектории, вдоль которой следуют объекты по первому транспортирующему средству. Кроме того, траектория следования транспортирующего средства 20 не обязательно параллельна траектории первого транспортирующего средства. Помимо этого, как указано выше, в рамках объема притязаний изобретения транспортируемые объекты могут относиться к разным типам.
Изобретение относится способу и устройству для регулирования скорости перемещения и расстояния между случайно транспортируемыми объектами, например таблетками ядерного топлива. Техническим результатом является подача объектов в соответствии с управляемыми промежутком и скоростью. Для этого объекты задерживаются неподвижным упором, находящимся на траектории транспортирующего средства. Когда обнаруживается наличие, по меньшей мере, одного объекта около неподвижного упора, циклически вращающееся устройство сталкивает упомянутый объект в поперечном направлении на направляющую скольжения в положение между двумя разделяющими элементами, несомыми бесконечной лентой. После этого лента продвигается вперед на интервал, равный расстоянию между двумя последовательными разделяющими элементами. 2 н. и 10 з.п. ф-лы, 4 ил.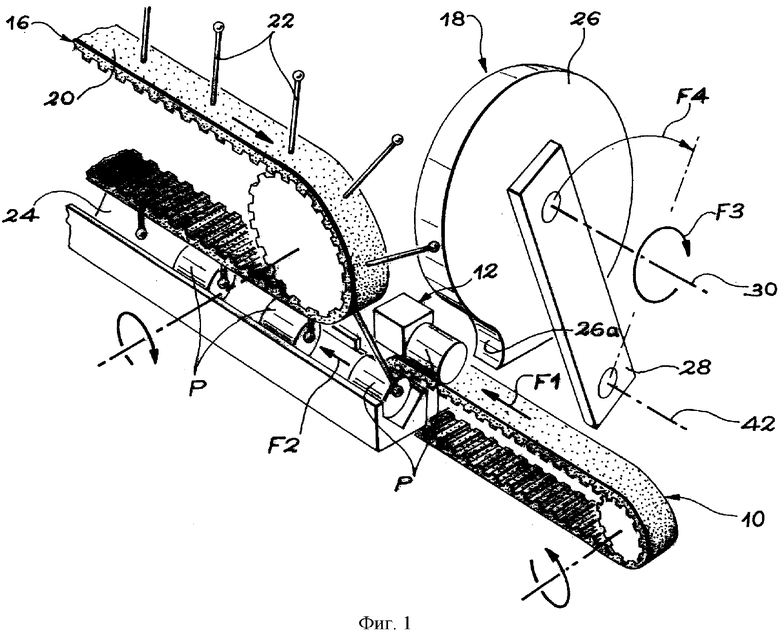
| US 3899069 А, 12.08.1975 | |||
| СПОСОБ ТРАНСПОРТИРОВКИ ПАКЕТОВ ПЕЧАТНОЙ ПРОДУКЦИИ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ДВОЙНОЙ ИЛИ МНОГОМЕСТНЫЙ ПАКЕТ | 1993 |
|
RU2114042C1 |
| Устройство для передачи грузовС пОдАющЕгО ТРАНСпОРТЕРА HA ОТВОдящий | 1979 |
|
SU819003A1 |
| Устройство для передачи грузов с одного транспортера на другой | 1958 |
|
SU119474A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ | 0 |
|
SU193996A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ИЗДЕЛИЙ | 1994 |
|
RU2125011C1 |
| Способ борьбы с сорняками | 1976 |
|
SU663356A1 |

