Изобретение относится к области вооружения и военной техники, в частности, к защите самолета от атакующих его управляемых ракет (УР), например, с помощью пулеметных (пушечных) оборонительных установок.
Анализ литературы показывает, что существует способ защиты обороняемого самолета (ОС), заключающийся в получении информации об атакующих целях с помощью аппаратуры предупреждения, фиксации момента пуска УР и противоракетном маневре [1].
Для реализации этого способа на современных самолетах, в частности фронтовых истребителях, существует подсистема обнаружения угрозы и оказания противодействия, включающая аппаратуру предупреждения об облучении и пеленгации наземных и бортовых станций противника, теплопеленгаторы, задачей которых является фиксация вспышки стартового двигателя УР, вычислитель системы обработки информации и управления [2].
Недостатками вышеприведенного способа и реализующей его системы являются следующие. Во-первых, для получения требуемых для безопасности ОС промахов в несколько десятков метров необходимо маневрировать с перегрузками порядка nос=8-10 единиц, что доступно лишь для высокоманевренных «легких» самолетов.
Во-вторых, для ракет маневренного воздушного боя, основной задачей которых является поражение интенсивно маневрирующей цели, динамический промах даже при nос=8-10 ед. близок к 0 и достигает условного максимума при τ≤1 с (где τ - время до встречи УР с ОС) благодаря высокой располагаемой перегрузке и широкополосному контуру.
Другими словами, применяемый способ неэффективен при отражении атаки высокоманевренных УР, поскольку не обеспечивается потребная величина систематического промаха.
Существует также способ повышения выживаемости ОС, заключающийся в получении информации об атакующих целях с помощью аппаратуры предупреждения, фиксации момента пуска УР, запуске ложных целей (например, выстреливания патронов с дипольными отражателями и ИК-трассерами) и (или) постановке активных помех средствами радиоэлектронной борьбы [3, 4].
Для реализации этого способа практически на всех современных отечественных и зарубежных самолетах организована автоматизированная система противодействия и создания помех, включающая в свой состав аппаратуру обнаружения работающих РЛС, аппаратуру фиксации момента пуска ракет противника (теплопеленгаторы), станции активных помех, пиропатронов ИК-помех, автомат выбрасывания дипольных отражателей [2].
Недостатками этого способа и реализующей его системы являются следующие. Во-первых, на современном уровне техники создания помех и помехозащищенности головок самонаведения (ГСН) вероятность срыва сопровождения цели современной помехозащищенной ГСН незначительна, и эффективность помехи определяется лишь степенью воздействия на систему управления УР и точность ее самонаведения. Во-вторых, применение ложных целей, например выстреливание патронов с дипольными отражателями и ИК-трассерами, выстреливание вперед или буксирование ложных целей, требует выделения на ОС значительных весов и самолетов, что приводит к снижению летных качеств носителя.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ защиты ОС от атакующих целей, заключающийся в поиске, обнаружении и сопровождении цели прицельно-навигационной системой с выдачей необходимых параметров в бортовой вычислитель, определении угловых поправок с отработкой их силовым приводом средства поражения и воздействии по цели средства поражения [5].
Известная система огневой защиты (СОЗ) самолета, выбранная в качестве прототипа заявляемой системы, содержит последовательно соединенные обзорно-прицельную систему, бортовой счетно-решающий прибор, силовые привода средства поражения, средство поражения, а также навигационную систему, причем выходы навигационной системы соединены со входами счетно-решающего прибора [5].
Недостатком этого способа и реализующей его системы является то, что не обеспечивается приемлемая выживаемость ОС вследствие больших дальностей стрельбы, необходимых для формирования потребного, исходя из безопасности ОС, систематического промаха пораженной УР.
Задачей предлагаемого способа и реализующей его системы является повышение выживаемости ЛА путем предельного уменьшения дальности стрельбы СОЗ и обеспечения при этом за счет маневра ЛА необходимого систематического промаха пораженной УР.
Поставленная задача достигается тем, что в известном способе защиты летательных аппаратов (ЛА) от управляемых ракет (УР), включающем поиск, обнаружение и сопровождение УР, определение угловых поправок средства поражения УР для определения его пространственного положения, поражающее воздействие по УР с учетом определенных поправок, согласно изобретению дополнительно до начала поражающего воздействия средства поражения выделяют наиболее атакоопасную из атакующих УР и определяют потребный промах hпотр выделенной УР, дальности начала маневра ЛА Dнм и поражающего воздействия Dн, при этом поражающее воздействие производят на дальности Dн, после чего на дальности Dнм осуществляют маневр ЛА с перегрузкой nос вверх в вертикальной плоскости до пролета УР.
Поставленная задача достигается также тем, что hпотр, Dнм и Dн определяют из соотношений:




где Dy, Dp - соответственно упрежденная дальность последнего выстрела и дальность рубежа, м,
ty - полетное время снаряда, с,
nос - допустимая перегрузка ЛА, ед,
vос, vр - скорости соответственно ЛА и УР, м/с,
β, ε - углы визирования цели в связанной с носителем системе координат, рад,
 - скорость сближения УР и ЛА, м/с,
- скорость сближения УР и ЛА, м/с,
g - ускорение свободного падения, м/с2,
K1 (К2) - коэффициенты аппроксимации ty(Dy), м/с (с/м2),

v01, cH - соответственно абсолютная скорость и приведенный баллистический коэффициент снаряда, м/с, м2/кгс,
nоч - длина очереди, выстр.,
N - темп стрельбы, выстр./мин,
hпотр - потребный промах наиболее атакоопасной идентифицированной УР.
Поставленная задача достигается тем, что в известной системе огневой защиты ЛА от УР, содержащей последовательно соединенные обзорно-прицельную систему, бортовой счетно-решающий прибор, силовые привода установки, средство поражения (СП), а также навигационную систему, причем выходы навигационной системы соединены со входами счетно-решающего прибора, согласно изобретению дополнительно введено устройство выбора дальностей маневра и стрельбы, содержащее последовательно соединенные блок формирования дальности рубежа, блок сравнения, блок формирования дальностей маневра и стрельбы, а также блок формирования полетного времени, причем первый и второй входы блока формирования дальности рубежа соединены соответственно со вторым и третьим выходами обзорно-прицельной системы, третий вход блока формирования дальности рубежа соединен с первым выходом навигационной системы, четвертый его вход соединен с выходом блока формирования полетного времени, а пятый вход блока формирования дальности рубежа - с первым выходом блока сравнения; первый вход которого соединен с первым выходом обзорно-прицельной системы, на второй и третий его входы подаются сигналы с задатчиков соответственно потребного значения промаха hпотр и допустимой перегрузки ЛА nос, четвертый вход блока сравнения соединен с выходом блока формирования полетного времени, первый и второй входы блока формирования полетного времени соединены соответственно со вторым и третьим выходами обзорно-прицельной системы, третий его вход соединен с первым выходом блока сравнения, четвертый и пятый входы блока формирования полетного времени соединены соответственно с первым и вторым выходами навигационной системы, на шестой и седьмой его входы поступают сигналы с задатчиков значения соответственно баллистического коэффициента с и начальной скорости снаряда v0, первый вход блока формирования дальностей маневра и стрельбы соединен с первым выходом навигационной системы, второй, третий и четвертый его входы соединены соответственно со вторым, третьим и первым выходами обзорно-прицельной системы, на пятый, шестой и седьмой входы блока формирования дальностей маневра и стрельбы поступают сигналы с задатчиков соответственно темпа стрельбы N, длины очереди nоч и скорости ракеты vp, девятый его вход соединен с выходом блока формирования полетного времени, а десятый - с шестым выходом навигационной системы, первый выход блока формирования дальностей маневра и стрельбы соединен со входом системы управления ЛА, а второй его выход - со входом СП.
Поставленная задача достигается также тем, что блок формирования дальности рубежа выполнен в виде последовательно соединенных первого множительного устройства, блока преобразования косинуса угла в синус, второго множительного устройства, блока преобразования синуса угла в косинус, сумматора и третьего множительного устройства, а также последовательно соединенных четвертого, пятого и шестого множительных устройств, причем первый и второй входы первого множительного устройства соединены соответственно с выходами первого и второго блоков определения косинуса угла (косинусных преобразователей), а выход его - со вторым входом шестого множительного устройства, выход пятого множительного устройства соединен со вторым входом второго множительного устройства, выход шестого множительного устройства соединен с инверсным вторым входом сумматора; входы первого и второго косинусных преобразователей соединены соответственно со вторым и третьим выходами обзорно-прицельной системы, первый и второй входы четвертого множительного устройства соединены соответственно с выходом блока формирования полетного времени и первым выходом блока сравнения, первый выход блока сравнения соединен также со вторым входом третьего множительного устройства, второй вход пятого множительного устройства соединен с первым выходом навигационной системы.
Поставленная задача достигается также тем, что блок сравнения выполнен в виде последовательно соединенных первого делителя, первого квадратора, первого сумматора, первого множительного устройства и блока поиска экстремума функции, а также последовательно соединенных второго сумматора, второго квадратора и второго множительного устройства, причем первый и второй входы второго сумматора соединены соответственно с выходом первого делителя и с выходом блока формирования полетного времени, а выход второго множительного устройства соединен со вторым входом первого сумматора, первый и второй входы первого делителя соединены соответственно с выходом блока формирования дальности рубежа и с первым выходом обзорно-прицельной системы, на второй вход второго множительного устройства подается сигнал с задатчика допустимой перегрузки ЛА nос, второй и инверсный третий входы блока поиска экстремума функции соединены соответственно с задатчиком начального значения упрежденной дальности  и с задатчиком требуемого промаха hпотр.
и с задатчиком требуемого промаха hпотр.
Поставленная задача достигается также тем, что блок формирования полетного времени выполнен в виде последовательно соединенных блока формирования относительной плотности воздуха, первого множительного устройства, первого блока формирования коэффициента аппроксимации, делителя, а также последовательно соединенных второго, третьего и четвертого множительных устройств, первого сумматора, блока извлечения квадратного корня и второго блока формирования коэффициента аппроксимации, а также последовательно соединенных первого квадратора, пятого множительного устройства, второго сумматора, причем второй вход первого блока формирования коэффициентов аппроксимации соединен с выходом блока извлечения квадратного корня, а первый вход второго блока формирования коэффициента аппроксимации - с выходом первого множительного устройства, выход делителя соединен со входом второго сумматора; второй вход пятого множительного устройства соединен с выходом второго блока формирования коэффициента аппроксимации; первый и второй входы первого сумматора соединены с выходами соответственно второго и третьего квадраторов; на вход второго квадратора и второй вход второго множительного устройства подается сигнал с первого выхода навигационной системы, на вход третьего квадратора и на первый вход второго множительного устройства подается сигнал с задатчика начальной скорости v0; первый вход четвертого множительного устройства соединен с выходом шестого множительного устройства, входы которого соединены с первым и вторым косинусными преобразователями, входы которых соединены соответственно со вторым и третьим выходами обзорно-прицельной системы; вход блока формирования относительной плотности воздуха соединен со вторым выходом навигационной системы; второй вход первого множительного устройства соединен с задатчиком баллистического коэффициента с; первый вход делителя и вход первого квадратора соединены с первым выходом блока сравнения.
Поставленная задача достигается также тем, что блок формирования дальностей маневра и стрельбы выполнен в виде последовательно соединенных первого множительного устройства, блока преобразования косинуса угла в синус, второго множительного устройства, первого квадратора, первого сумматора с инверсным входом, первого блока извлечения квадратного корня, второго сумматора, третьего множительного устройства, третьего сумматора, элемента сравнения дальности, а также последовательно соединенных четвертого множительного устройства, второго квадратора, четвертого сумматора с инверсным первым входом, второго блока извлечения квадратного корня, пятого множительного устройства, а также последовательно соединенных задатчика темпа стрельбы N, первого делителя и шестого множительного устройства, причем первый вход четвертого множительного устройства соединен с выходом блока преобразования косинуса угла в синус, второй вход второго сумматора соединен с выходом пятого множительного устройства, второй вход третьего сумматора соединен с выходом шестого множительного устройства; второй вход второго множительного устройства соединен с выходом седьмого множительного устройства, первый вход которого соединен с выходом второго делителя, первый вход которого соединен со вторым выходом блока сравнения, а второй вход - с выходом блока формирования полетного времени, второй вход пятого множительного устройства соединен с выходом второго делителя, вторые входы четвертого и седьмого множительных устройств соединены с первым выходом навигационной системы, первый и второй входы первого множительного устройства соединены соответственно с первым и вторым косинусными преобразователями, входы которых соединены соответственно с третьим и вторым выходами обзорно-прицельной системы, второй вход четвертого сумматора соединен с выходом третьего квадратора, на вход которого подается сигнал с задатчика скорости ракеты vp, второй вход третьего множительного устройства соединен со вторым выходом блока сравнения, второй вход первого делителя соединен с задатчиком длины очереди nоч, второй вход шестого множительного устройства соединен с первым выходом обзорно-прицельной системы, а второй вход элемента сравнения дальности - с шестым выходом навигационной системы.
Поставленная задача достигается также тем, что блок формирования дальностей маневра и стрельбы выполнен в виде последовательно соединенных первого квадратора, первого множительного устройства, первого сумматора, блока извлечения квадратного корня, второго множительного устройства, второго сумматора, третьего множительного устройства, третьего сумматора, элемента сравнения дальности, а также последовательно соединенных задатчика темпа стрельбы N, первого делителя, четвертого множительного устройства, выход которого соединен с третьим сумматором, причем инверсный второй вход первого множительного устройства соединен с выходом второго квадратора, вход которого соединен с первым выходом навигационной системы, второй вход первого сумматора соединение выходом третьего квадратора, вход которого соединен с задатчиком скорости ракеты vp, второй вход второго множительного устройства соединен с выходом второго делителя, первый вход которого соединен со вторым выходом блока сравнения, а второй вход второго делителя соединен с выходом блока формирования полетного времени, вход первого квадратора соединен с выходом блока преобразования косинуса угла в синус, входящего, в свою очередь, в блок формирования дальности рубежа, а второй вход второго сумматора соединен с выходом блока преобразования синуса угла в косинус, входящего, в свою очередь, также в блок формирования дальности рубежа; второй вход третьего множительного устройства соединен со вторым выходом блока сравнения, второй вход первого делителя соединен с задатчиком длины очереди nоч, второй вход четвертого множительного устройства соединен с первым выходом обзорно-прицельной системы, а второй вход элемента сравнения дальности - с шестым выходом навигационной системы.
В частном случае средством поражения является пулеметная (пушечная) установка.
В частном случае средством поражения является боевая лазерная установка.
Именно определенные с помощью дополнительного блока значения дальностей Dнм и Dн и реализованные при отражении атаки УР обеспечивают согласно способу выживаемость ЛА и тем самым достижение цели изобретений. Это позволяет сделать вывод о том, что заявляемые изобретения связаны между собой единым изобретательским замыслом.
Сопоставительный анализ заявляемых решений с прототипами показывает, что заявляемый способ отличается от известного тем, что до начала стрельбы, производя идентификацию и выделение наиболее атакоопасной цели, определяют потребный промах пораженной УР (УР с поврежденной системой управления (СУ)) относительно защищаемого ЛА, например ОС, из условия обеспечения вероятности поражения ЛА от подрыва неконтактного взрывателя УР с поврежденной СУ при пролете ЛА, близкой к 0 (см. фиг.1)

где Rпор - вероятность поражения ЛА УР с поврежденной СУ,

где  - функция Бесселя первого рода нулевого порядка,
- функция Бесселя первого рода нулевого порядка,
h - систематическая составляющая промаха,
σ=σУР - СКО случайного промаха УР,
dф - приведенный диаметр ЛА (например, фюзеляжа ОС).
Как следует из приведенной зависимости для расчета, задача определения Rпор в данном случае сводится к нахождению вероятности попадания УР, рассеивание которой в картинной плоскости подчинено закону Райса  в круг радиуса
в круг радиуса  .
.
Для выявления характеристик: поражающего действия УР RУР (RУР=min(RБЧ, Rвзр), где РБЧ и Rвзр - радиусы действия соответственно боевой части и взрывателя УР) и рассеяния σУР - предварительно необходимо произвести выделение наиболее атакоопасной из атакующих и идентификацию УР, например, по величине эффективной площади рассеяния, степени аэродинамического нагрева, скорости сближения, размерам, дальности пуска и т.п. [6].
Вводя в бортовую вычислительную систему (ВВС) с помощью имеющихся на борту датчиков прицельно-навигационной системы потребную информацию о параметрах движения цели и носителя, внешних условий (1, 2), а также данные об оружии (3) (например, пушечной установке) по схеме:

где D, - соответственно дальность, м, и скорость сближения ЛА и УР, м/с,
β, ε - угловые координаты цели в связанной с носителем системе координат (см. фиг.2),
ωYD, ωZD - угловые скорости линии визирования относительно осей визирной системы координат OYD и OZD, рад/с (см. фиг.2),
vOC - скорость носителя, м/с,
Н(Н) - относительная плотность воздуха,
с, v0 - соответственно баллистический коэффициент, м2/кгс, и начальная скорость снаряда, м/с,
N - темп стрельбы, выстр./мин,
рассчитываем предварительно скорость УР vp, м/с, по зависимости

затем с помощью предлагаемого дополнительного устройства выбора дальностей начала маневра и стрельбы (см. фиг.3-4) определяем рациональные дальности начала маневра Dнм и начала стрельбы Dн из соотношений:




где D, Dy, Dp - соответственно дальность визирования цели, упрежденная дальность последнего выстрела и дальность рубежа, м,
ty - полетное время снаряда, с,
nос - допустимая перегрузка ЛА, ед,
voc, vp - скорости соответственно ЛА и УР, м/с,
β, ε - углы визирования цели в связанной с носителем системе координат, рад,
 - скорость сближения УР и ЛА, м/с,
- скорость сближения УР и ЛА, м/с,
g - ускорение свободного падения, м/с2,
K1 (К2) - коэффициенты аппроксимации ty(Dy), м/с (с/м2),
v01, cH - соответственно абсолютная скорость и приведенный баллистический коэффициент снаряда, м/с, м2/кгс,
nоч - длина очереди, выстр.,
N - темп стрельбы, выстр./мин,
hпотр - потребный промах наиболее опасной идентифицированной УР.
Стрельба производится на заранее рассчитанной (см. выше) рациональной дальности (Dн), которая зависит от параметров движения цели и носителя, внешней среды, характеристик оружия, типа атакующей УР, параметров ее поражающего действия и точности.
В момент окончания стрельбы на заранее рассчитанной дальности Dнм осуществляется маневр ОС с допустимой перегрузкой  .
.
Сравнение заявляемых технических решений с прототипами позволяет установить соответствие критерию «новизна».
Анализ известных способов защиты ЛА в данной и смежных областях техники не позволяет выявить в них совокупность признаков, отличающих заявляемое решение от прототипа.
Операции идентификации целей, поражающего воздействия по цели путем стрельбы ПУ [5] или лазерного излучения [9, 10], маневра ЛА широко известны. Однако при их введении в способ в указанной последовательности (связи) на предварительно рассчитанных рациональных дальностях (или строго в определенные моменты времени) достигается желаемый эффект - повышение выживаемости ЛА.
При изучении других известных технических решений в данной области техники признаки, отличающие заявляемое изобретение - систему огневой защиты ЛА от прототипа, также не были выявлены.
Это позволяет сделать вывод о соответствии предлагаемых решений критерию «существенные отличия».
Положительный эффект достигается за счет оптимального сочетания стрельбы оборонительной ПУ(поражающего воздействия лазерной установки) и маневра ОС. Чтобы не увеличивать ошибок стрельбы, маневр целесообразно начинать сразу по окончании стрельбы.
При этом добиваются двойного эффекта. Во-первых, ухудшаются условия наведения УР из-за возникновения неустановившихся режимов наведения УР на конечном участке, при любых методах наведения  . Во-вторых, и это основная цель маневра, обеспечивается дополнительный вклад в систематическую составляющую промаха.
. Во-вторых, и это основная цель маневра, обеспечивается дополнительный вклад в систематическую составляющую промаха.
На фиг.5 приведена схема, иллюстрирующая процесс формирования промаха УР с поврежденной СУ относительно ЛА, например ОС.
Систематическая составляющая промаха обеспечивается за счет двух составляющих: «провисания» поврежденной УР (h1) и за счет маневра ОС по окончанию стрельбы (h2)

где Dp - дальность рубежа (между точкой поражения УР и самолетом в момент поражения УР), м,
 - скорость сближения УР и ОС, м/с,
- скорость сближения УР и ОС, м/с,
ty - полетное время снаряда на дальность Dy, с,





где Dy - упрежденная (полетная дальность последнего выстрела),
β, ε - углы визирования цели в связанной с носителем (ЛА) системе координат,
Δβ, Δε - угловые поправки стрельбы.
Пример расчетных зависимостей Δβ и Δε и их реализация приведены, в частности, в [5].
Следует отметить, что вышеприведенные уравнения являются связанными, т.к. ty=ty(cHDy,v01), v01=v01(vос,v0,β',ε'), β'=β+Δβ, ε'=ε+Δε, Δβ=Δβ(D), Δε=Δε(D), поэтому эти уравнения необходимо решать совместно. Однако, учитывая, что значения Δβ, Δε малы на исследуемых нами дальностях (Dнм≅100-400 м) по сравнению со значениями β и ε, с достаточной для расчетов точностью можно положить cosβ'≅cosβ, cosε'≅cosε.
Это позволяет упростить процесс поиска Dнм и, как это будет показано ниже, появляется возможность свести его к последовательному решению решению нелинейных алгебраических уравнений.
Из упредительного треугольника АВС по теореме синусов можно записать:
где ψр, ψсн - углы упреждения соответственно УР и снаряда.
После промежуточных выкладок с использованием тригонометрических преобразований и с учетом зависимостей  ,
,  , где q - курсовой угол (угол между скоростью ОС и линией визирования D, см. фиг.5), можно записать:
, где q - курсовой угол (угол между скоростью ОС и линией визирования D, см. фиг.5), можно записать:
Из упредительного треугольника BCD по теореме синусов можно записать:

По аналогии с вышеприведенными рассуждениями получаем:
По полученному таким образом алгоритму с учетом потребного для каждой УР-цели промаха hпотр построены линии равных промахов. На фиг.6 в качестве примера приведена номограмма  , с помощью которой устанавливается взаимосвязь между потребной перегрузкой ОС nос при маневре, упрежденной дальностью окончания стрельбы Dy (упрежденная дальность последнего выстрела) и вероятностью выживания ОС при отражении атаки УР
, с помощью которой устанавливается взаимосвязь между потребной перегрузкой ОС nос при маневре, упрежденной дальностью окончания стрельбы Dy (упрежденная дальность последнего выстрела) и вероятностью выживания ОС при отражении атаки УР  .
.
Входя в график nос-Dу с заданным для данного ОС значением допустимой перегрузки, например, nос=6 ед., находим дальность начала маневра, соответствующую упрежденной дальности последнего выстрела оборонительной ПУ. Для УР «AMRAAM» (hпотр=18 м) эта величина составляет Dнм=Dу=180 м. Далее, переходя в график  , для Dу=180 м находим обеспечиваемое при этом значение
, для Dу=180 м находим обеспечиваемое при этом значение  при σт.р.=3 мрад. Время маневра при этом составляет tм=0.7 с. Для сравнения при nос=0
при σт.р.=3 мрад. Время маневра при этом составляет tм=0.7 с. Для сравнения при nос=0  .
.
Выбранные с помощью предлагаемых соотношений значения дальностей маневра и стрельбы являются рациональными, поскольку уменьшение их приведет к резкому возрастанию безопасности ОС за счет подрыва неконтактного взрывателя УР с поврежденной системой управления при пролете. С другой стороны, увеличение этих дальностей приведет к снижению вероятности попадания снарядов в УР (в случае ПУ). Увеличение дальности, на которой осуществляется воздействие по цели боевой лазерной установки, приводит к повышению потребной мощности лазера, а следовательно, ее массы, габаритов и стоимости.
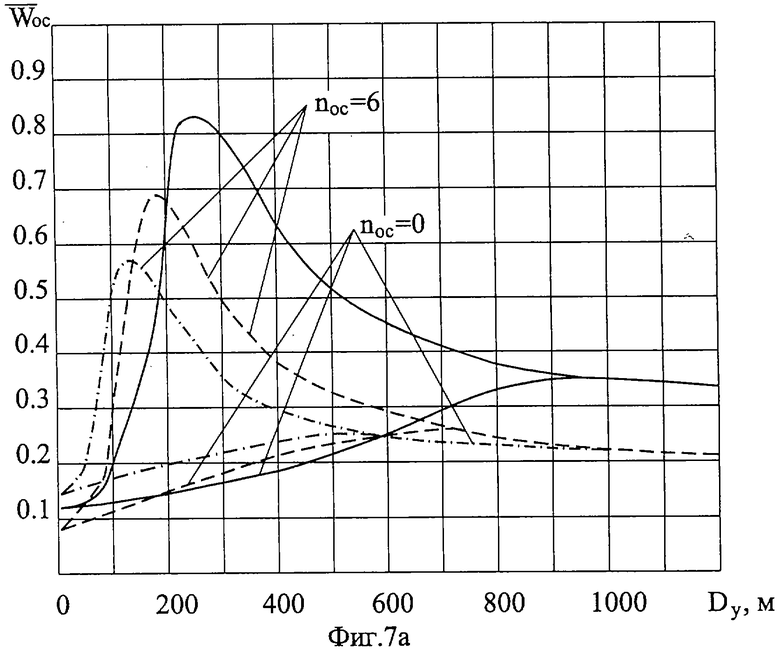
На фиг.7а в качестве иллюстрации построены зависимости вероятности выживания ОС от дальности Dу для СОЗ на базе двух 6-мм пулеметов ТКБ-764 (N∑=2×10000 выстр./мин, v0=1050 м/с, σт..р=3 т.д.) при отражении так УР типа «Феникс», «AMRAAM» и «Сайдвидер», на рис.7б - для СОЗ на базе 57 мм пушки ТКБ-776 (N=900 выстр./мин, v0=500 м/с, σт.р.=4 мрад).
Как видно из графиков, при кратковременном маневрировании ОС (Δt=0.7-1.2 с) с перегрузкой nос=6 ед. СОЗ на базе двух спаренных пулеметов ТКБ-764 обеспечивает вероятность выживания ОС при отражении УР «Сайдвиндер»  (против при nос=0), УР «AMRAAM» 0.7 (против
(против при nос=0), УР «AMRAAM» 0.7 (против  при nос=0) и УР «Феникс» 0.83 (против
при nос=0) и УР «Феникс» 0.83 (против  при nос=0).
при nос=0).
Увеличение допустимой перегрузки ОС до nос=8 ед. повышает выживаемость ОС до следующих уровней: при отражении УР «Сайдвиндер»  , УР «AMRAAM»
, УР «AMRAAM»  и УР «Феникс»
и УР «Феникс»  .
.
Из рис.7б следует, что даже используя при маневре перегрузку nос=2 ед., вполне достижимую для "тяжелых самолетов", оснащенных СОЗ на базе 57-мм пушки ТКБ-776 со снарядами неконтактного действия, вероятность выживания ОС (УР «AMRAAM») можно увеличить с  (
( при nос=0) до
при nос=0) до  (
( при nос=2 ед.). Время маневра tм≅1.2 c.
при nос=2 ед.). Время маневра tм≅1.2 c.
Таким образом, предлагаемый способ и устройство для его реализации дают положительный эффект - повышение выживаемости ОС и могут быть использованы в широком классе носителей (ЛА) и систем их огневой защиты.
На фиг.1 построены зависимости вероятности поражения ОС при пролете УР с поврежденной СУ Rпор от промаха h для УР типа «Сайдвиндер», «AMRAAM» и «Феникс» по зависимости (*) (см. описание стр.11) и при исходных данных, приведенных в таблице (графа 1, 2).
На фиг.2 показана ориентация визирной XDYDZD и связанной с подвижной артиллерийской установкой  систем координат (с.к.) относительно связанной (с носителем) с.к. XнYнZн.
систем координат (с.к.) относительно связанной (с носителем) с.к. XнYнZн.
С.к. XнYнZн жестко связана с центром масс самолета-носителя. Ось ОХн направлена вдоль продольной оси самолета по направлению полета, ось OYн - в плоскости симметрии ОС вверх перпендикулярно к плоскости XнOZн, причем за положительное направление оси принимаем направление вправо.
С.к. XDYDZD связана с системой сопровождения цели (визирным устройством). Ось ОХD направлена по оси дальности. С.к. XDYDZD образуется из с.к. ХнYнZн двумя поворотами: а) вокруг оси OYн на угол β в плоскости крыльев самолета и б) вокруг оси OZD в плоскости, перпендикулярной к плоскости крыльев, на угол ε.
С.к. связана с подвижной ПУ. Ось  направлена по оси ствола пушки по вектору v0. С.к. образуется из с.к. ХнYнZн двумя поворотами: а) вокруг оси вращения, параллельной оси OYн самолета на угол β', б) вокруг оси
направлена по оси ствола пушки по вектору v0. С.к. образуется из с.к. ХнYнZн двумя поворотами: а) вокруг оси вращения, параллельной оси OYн самолета на угол β', б) вокруг оси  на угол ε'.
на угол ε'.
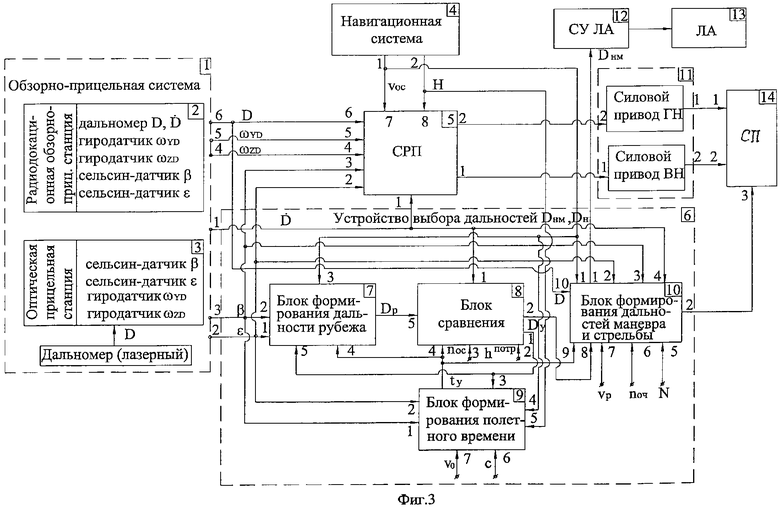
На фиг.3 представлена предполагаемая функциональная схема СОЗ самолета:
1 - обзорно-прицельная система; 2 - радиолокационная обзорно-прицельная станция; 3 - оптическая прицельная станция; 4 - навигационная система; 5 - счетно-решающий прибор; 6 - устройство выбора дальностей маневра и стрельбы; 7 - блок формирования дальности рубежа Dp; 8 - блок сравнения; 9 - блок формирования полетного времени tу; 10 - блок формирования дальностей начала маневра и начала стрельбы; 11 - силовые привода установки; 12 - система управления ЛА; 13 - ЛА; 14 - пушечная (пулеметная) установка (или боевая лазерная установка).
На фиг.4 дана подробная структурная схема блоков устройства 6, построенных на аналоговых элементах.
Сигналы Dнм и Dн на выходе устройства 6 формируются следующим образом.
Блок формирования дальности рубежа Dp 7.
На входы первого и второго косинусных преобразователей с прицельной станции 1 поступают угловые координаты β и ε. На выходе его формируются сигналы соответственно cosβ и cosε, которые, в свою очередь, поступают на вход первого множительного устройства (МУ) МУ1, где происходит их перемножение. Полученное на выходе МУ1 произведение cosβ·cosβε=cosq поступает на вход косинусно-синусного преобразователя, где формируется сигнал sinq.
Одновременно на вход четвертого МУ-МУ4 поступают с блока сравнения 8 электрический сигнал, соответствующий Dу, а с выхода блока формирования полетного времени 9 сигнал tу, где происходит деление. Сигнал  поступает на вход пятого МУ МУ 5, на второй вход которого с навигационной системы 4 подается значение voc. После перемножения этих сигналов в блоке МУ5 образуется сигнал
поступает на вход пятого МУ МУ 5, на второй вход которого с навигационной системы 4 подается значение voc. После перемножения этих сигналов в блоке МУ5 образуется сигнал  , который подается на второй вход второго МУ-МУ2, где происходит перемножение его на sinq, поступающий с выхода косинусно-синусного преобразователя. Полученный на выходе МУ2 сигнал cosψсн поступает на вход синусно-косинусного преобразователя, на выходе которого формируется сигнал, который суммируется в сумматоре (СУМ) с предварительно инвертированным сигналом
, который подается на второй вход второго МУ-МУ2, где происходит перемножение его на sinq, поступающий с выхода косинусно-синусного преобразователя. Полученный на выходе МУ2 сигнал cosψсн поступает на вход синусно-косинусного преобразователя, на выходе которого формируется сигнал, который суммируется в сумматоре (СУМ) с предварительно инвертированным сигналом  . Полученная на выходе СУМ разность
. Полученная на выходе СУМ разность  поступает на вход третьего МУ-МУ3, где перемножается с сигналом Dу, поступающим с выхода блока сравнения 8, в результате на выходе МУ3 формируется выходной сигнал блока формирования дальности рубежа 7
поступает на вход третьего МУ-МУ3, где перемножается с сигналом Dу, поступающим с выхода блока сравнения 8, в результате на выходе МУ3 формируется выходной сигнал блока формирования дальности рубежа 7  .
.
Блок сравнения 8.
Сформированный на выходе блока формирования дальности рубежа Dp 7 сигнал Dp поступает на первый вход первого делителя Д1, на второй вход его с прицельной станции 1 поступает сигнал  . После деления в Д1 Dp на сигнал
. После деления в Д1 Dp на сигнал  поступает вход первого квадратора К1, где образуется сигнал
поступает вход первого квадратора К1, где образуется сигнал  , и на вход второго СУМ СУМ2, на второй вход которого поступает сигнал ty с выхода блока формирования полетного времени 9. На выходе СУМ2 формируется сумма
, и на вход второго СУМ СУМ2, на второй вход которого поступает сигнал ty с выхода блока формирования полетного времени 9. На выходе СУМ2 формируется сумма  , которая далее поступает на вход второго квадратора К2, на выходе которого формируется сигнал
, которая далее поступает на вход второго квадратора К2, на выходе которого формируется сигнал  . Этот сигнал поступает на первый вход второго МУ - МУ2, на второй вход которого летчиком задается допустимое значение перегрузки ЛА nос. В результате перемножения на выходе МУ2 формируется сигнал
. Этот сигнал поступает на первый вход второго МУ - МУ2, на второй вход которого летчиком задается допустимое значение перегрузки ЛА nос. В результате перемножения на выходе МУ2 формируется сигнал  который поступает на второй вход первого сумматора СУM1, на выходе которого формируется сумма (с одновременным перемножением на коэффициент
который поступает на второй вход первого сумматора СУM1, на выходе которого формируется сумма (с одновременным перемножением на коэффициент  )
)  Этот сигнал вычитается из задаваемого на вход блока поиска экстремума (extr) сигнал hпотр.
Этот сигнал вычитается из задаваемого на вход блока поиска экстремума (extr) сигнал hпотр.
Полученная разность  в блоке поиска экстремума сравнивается с заданной точностью εзад. При выполнении условия ε≤εзад полученное значение Dу является выходным и передается по выходу 2 в блок формирования дальностей начала маневра и начала стрельбы 10.
в блоке поиска экстремума сравнивается с заданной точностью εзад. При выполнении условия ε≤εзад полученное значение Dу является выходным и передается по выходу 2 в блок формирования дальностей начала маневра и начала стрельбы 10.
В случае выполнения условия ε>εзад формируется новое значение  и передается по выходу 1 на новую итерацию в блок формирования полетного времени, цикл повторяется [8].
и передается по выходу 1 на новую итерацию в блок формирования полетного времени, цикл повторяется [8].
Блок формирования полетного времени tу 9.
На вход блока формирования относительной плотности воздуха Н(Н) с навигационной системы 4 поступает значение высоты полета ОС Н, где выбирается значение относительной плотности воздуха Н(Н), оно поступает на вход первого множительного устройства МУ1, на второй вход которого заводится с СРП значение баллистического коэффициента с. После перемножения в МУ1 получается значение cН=с×Н(Н), которое поступает на первые входы блоков формирования коэффициентов аппроксимации K1(cн, v01) и К2(сн, v01), на вторые входы которых поступает значение абсолютной начальной скорости v01, которое формируется следующим образом. На вход второго квадратора К2 и второй вход второго множительного устройства МУ2 поступает с навигационной системы значение скорости носителя voc, а значение начальной скорости снаряда v0 - на вход третьего квадратора и первый вход МУ2, на выходе которого формируется произведение v0·voc, которое, удваиваясь в третьем МУ-МУ3, поступает на второй вход МУ4. На первый вход МУ4 поступает произведение cosβ·cosε=cosq с выхода МУ6, сформированное с помощью двух косинусных преобразователей из сигналов β и ε, поступающих на их входы с обзорно-прицельной системы 1-3.
После перемножения в МУ4 поступивших на его вход двух сигналов на выходе его образуется сигнал 2·voc·v0·cosβ·cosε, который поступает на третий вход СУM1, на первый и второй входы которых поступают сигналы соответственно  и
и  соответственно с К2 и К3. На выходе СУM1 образуется сумма
соответственно с К2 и К3. На выходе СУM1 образуется сумма  , которая поступает на вход блока извлечения корня √, на выходе которого формируется сигнал
, которая поступает на вход блока извлечения корня √, на выходе которого формируется сигнал  , который поступает на вторые входы первого и второго блоков формирования коэффициентов аппроксимации, где формируются сигналы соответственно K1=К1(cH,v01) и К2=К2(сН,v01), поступающие далее на вторые входы соответственно делителя Д и МУ5.
, который поступает на вторые входы первого и второго блоков формирования коэффициентов аппроксимации, где формируются сигналы соответственно K1=К1(cH,v01) и К2=К2(сН,v01), поступающие далее на вторые входы соответственно делителя Д и МУ5.
На первый и второй входы СУМ2 поступают с выходов соответственно Д и МУ5 сигналы  и
и  . Сформированное в СУМ2 значение
. Сформированное в СУМ2 значение  является выходным сигналом блока формирования полетного времени 9.
является выходным сигналом блока формирования полетного времени 9.
Блок формирования дальностей начала маневра и начала стрельбы 10.
На первый вход делителя 2 Д2 с первого выхода блока сравнения 8 поступает значение Dу, а на второй его вход с выхода блока формирования полетного времени tу 9 - значение tу. Сформированный на выходе Д2 сигнал поступает на первый вход седьмого МУ (МУ7) и на второй вход МУ5. В МУ7 происходит перемножение на величину voc, поступающую на второй его вход. Образующийся на выходе блока МУ7 сигнал  поступает на второй вход МУ2.
поступает на второй вход МУ2.
Одновременно с выхода прицельной системы 1-3 на входы косинусных преобразователей поступают соответственно значения β и ε. Полученные в результате значения cosβ и cosε поступают на вход МУ1, где перемножаются, сигнал cosβ×cosε=cosq поступает на вход косинусно-синусного преобразователя, c выхода которого сигнал sinq поступает на первые входы МУ2 и МУ4. После перемножения sinq на значение voc, поступающее на второй вход МУ4, возведения полученного сигнала в квадрат во втором квадраторе К2 и инверсирования посылаем на первый вход СУМ4 сигнал -  . В СУМ 4 происходит суммирование его с сигналом
. В СУМ 4 происходит суммирование его с сигналом  , получаемым с третьего квадратора К3, на вход которого подается с СРП 5 значение vp.
, получаемым с третьего квадратора К3, на вход которого подается с СРП 5 значение vp.
Полученный на выходе СУМ4 сигнал  поступает на вход второго блока извлечения корня √2, где происходит извлечение корня. Сформированный таким образом сигнал перемножается в МУ5 с сигналом - и поступает на вход СУМ2.
поступает на вход второго блока извлечения корня √2, где происходит извлечение корня. Сформированный таким образом сигнал перемножается в МУ5 с сигналом - и поступает на вход СУМ2.
В МУ2 происходит перемножение поступающих на первый вход sinq и на второй вход с выхода МУ7. Полученный на выходе МУ2 сигнал, проходя через первый квадратор K1 (sin2ψсн) в СУМ1 вычитается из единицы (1-sinψсн) и поступает на вход первого блока извлечения корня √1, на выходе которого образуется сигнал  , который поступает на вход СУМ2.
, который поступает на вход СУМ2.
Полученная на выходе СУМ2 сумма, перемножаясь в МУ3 с поступающим со второго выхода блока сравнения 8 Dy, образует сигнал  , который является первым выходом для блока формирования дальностей начала маневра и начала стрельбы 10, далее Dнм идет на СУ ЛА 12.
, который является первым выходом для блока формирования дальностей начала маневра и начала стрельбы 10, далее Dнм идет на СУ ЛА 12.
Кроме того, Dнм поступает на первый вход СУМ3. На входы Д1 поступают с СРП значения темпа стрельбы ПУ N (выстр/мин) и длины очереди nоч (выстр.). Полученный на выходе сигнал  , перемножаясь далее в МУ6 N со значением , поступает на второй вход СУМ3, где и образуется второй выходной сигнал блока формирования дальностей начала маневра и начала стрельбы 10: дальность начала стрельбы
, перемножаясь далее в МУ6 N со значением , поступает на второй вход СУМ3, где и образуется второй выходной сигнал блока формирования дальностей начала маневра и начала стрельбы 10: дальность начала стрельбы  В элементе сравнения дальности постоянно сравниваются текущая D и вычисленная дальность начала стрельбы Dн, и при выполнении (с некоторой заданной точностью) условия D≤Dн формируется разрешающий сигнал, который далее идет на ПУ 14.
В элементе сравнения дальности постоянно сравниваются текущая D и вычисленная дальность начала стрельбы Dн, и при выполнении (с некоторой заданной точностью) условия D≤Dн формируется разрешающий сигнал, который далее идет на ПУ 14.
Примечание. Схема состоит из известных устройств типа множительное устройство (МУ), сумматор (СУМ), функциональный преобразователь (ФП), примеры реализации которых (схемы набора на элементах) широко приведены в соответствующей литературе, например [7, 8].
На фиг.5 представлена схема формирования систематического промаха УР относительно ОС  .
.
Здесь:
AB - линия визирования цели (УР),
С - точка встречи снаряда с целью,
К - прогнозируемая точка встречи УР и ОС,
 ,
,  - скорости соответственно ОС и УР,
- скорости соответственно ОС и УР,
D - относительная дальность ОС-УР в момент выстрела,
Dу - упрежденная (полетная) дальность снаряда,
Dp - дальность рубежа (между ОС и целью) в момент встречи с целью последнего снаряда очереди.
Плоскость атаки (ΔАВК) включает вектора и , и в общем случае наклонная в с.к. XнYнZн·cosq=cosβ·cosε.
На фиг.6 приведен совмещенный график: потребная перегрузка ОС nос и вероятность непоражения ОС  при отражении атаки УР со стороны задней полусферы (q=180°) от упрежденной дальности последнего выстрела Dу.
при отражении атаки УР со стороны задней полусферы (q=180°) от упрежденной дальности последнего выстрела Dу.
а) для СОЗ на базе двух пулеметов ТКБ-764: d=6 мм, N∑=20000 выстр./мин, v0=1050 м/с, С=2.88 м2/кгс, σт.р.=3.0 мрад;
б) для СОЗ на базе пушки ТКБ-776: d=57 мм, N=900 выстр./мин, v0=500 м/с, С=1/3 м2/кгс, σт..р.=4.0 мрад:



На фиг.7 построены зависимости вероятности выживания ОС от упрежденной дальности последнего выстрела Dу а) при перегрузке ОС после окончания стрельбы nос=0 и 6 ед. для СОЗ на базе двух 6-мм пулеметов ТКБ-674, σт..p.=3.0 мрад:



б) при перегрузке ОС после окончания стрельбы nос=0 и 2 ед. для СОЗ на базе 57-мм пушки ТКБ-776, σт.р.=4.0 мрад.
На фиг.8 в качестве примера представлена циклограмма работы СОЗ ОС.
Циклограмма иллюстрирует заявляемый способ защиты ЛА от атакующих УР. Как видно из фиг.8, дополнительно к традиционным операциям, выполняемым обычно в следующей последовательности: обнаружение целей РЛС и выдача целеуказания (ЦУ) от обзорной РЛС к ОЛС, захват цели ОЛС на сопровождение (в свою очередь, включающий обзор ОЛС в заданном секторе, отработку ЦУ угломерным каналом и слежение за целью, отработка ЦУ дальномерным каналом), слежение, расчет в СРП угловых поправок стрельбы по двум каналам и отработка их силовым приводом - введены дополнительно последовательно выполняемые операции: выбор наиболее атакоопасной из атакующих, включая идентификацию УР, определение потребного промаха hпотр, определение дальностей начала маневра Dнм и начала стрельбы Dн, стрельба ПУ при приближении УР на дальность Dн и маневр на дальности Dнм.
Последовательность выполнения и примерные длительности (время выполнения) перечисленных операций см. на циклограмме фиг.8.
Ниже приведен пример отражения атакующей УР ОС с использованием заявляемого способа и реализующей его системы огневой защиты ОС. Рассмотрен случай двухступенчатой обзорно-прицельной системы (РЛС+ОЛС, см. фиг.3).
Предварительно перед началом боевой операции в бортовую вычислительную систему самолета необходимо занести характеристики оборонительной ПУ: начальную скорость v0, м/с, баллистический коэффициент снаряда с, м2/кгс, темп стрельбы N, выстр./мин, предполагаемую, исходя из боезапаса, длину очереди nоч, выстр., а также допустимую перегрузку ОС nос.
После появления сигнала об опасности, выдаваемого аппаратурой предупреждения об угрозе, имеющейся практически на каждом боевом самолете, включается РЛС поиска 2.
При обнаружении атакующих целей РЛС поиска 2 осуществляет выдачу предварительного целеуказания ОЛС 3. В указанном секторе ОЛС ведет поиск цели. Далее происходит параллельно захват цели угломерным и дальномерным каналами ОЛС и начинается слежение за целью: при этом угловые координаты цели β и ε измеряются с помощью визирного устройства путем непрерывного сопровождения цели. Угловые скорости ωYD и ωZD измеряются с помощью гироскопических датчиков, установленных на оптической прицельной станции 3.
Поскольку от начала выдачи дальномером ОЛС в бортовую вычислительную систему необходимо иметь ≥10 отметок, а дискретность работы дальномера составляет 4-10 Гц, дополнительно требуются около 1 с слежения дальномером.
Параллельно описываемым процессам обнаружения, выдачи и отработки ЦУ, сопровождения до начала стрельбы производится выбор и идентификация наиболее атакоопасной цели, определение потребного для данного типа УР промаха hпотр.
Операции идентификации и выбора наиболее атакоопасной цели широко известны и используются в современной технике. В той или иной мере эти операции производятся прицельно-навигационными комплексами практически всех боевых самолетов. Например, прицельно-навигационным комплексом современных истребителей в режиме дискретной пеленгации (сопровождение до 10 целей) фиксируются дальности до целей и выдаются в бортовой счетно-решающий прибор, прогнозируется движение каждой цели с учетом скорости ее сближения с самолетом и автоматически выделяются две наиболее атакоопасные цели. Летчик при желании может внести свои коррективы в выбор этих целей. Далее осуществляется переход в режим непрерывной пеленгации (точное сопровождение) выделенной цели.
Алгоритмы идентификации и выбора наиболее атакоопасных целей более подробно представлены в соответствующей литературе, например [6].
После взятия на сопровождение цели типа УР ОЛС в счетно-решающем приборе (СРП) 5 производится определение (расчет) угловых поправок стрельбы по двум каналам Δβ и Δε. Силовые привода установки 11, отрабатывая управляющие сигналы Δβ и Δε, в каждый момент времени разворачивают стволы ПУ в нужном направлении.
После определения hпотр и введения его в СРП 5 с помощью дополнительного устройства выбора дальности маневра стрельбы 6 определяются по ранее полученному алгоритму 1-4 рациональные дальности начала маневра и начала стрельбы Dнм и Dн (см. фиг.3 и 4).
Устройство 6 работает следующим образом. По первому начальному значению  в блоке 9 с использованием информации с ПрНС: β, ε, voc и Н и СРП: v0, с, N, nоч, вычисляется первое значение tу, которое, в свою очередь, поступает на управляющие входы блока формирования дальности рубежа 7 и блока сравнения 8. В блоке 7 по управляющим сигналам tу и Dу (с блока 8) с использованием информации с ПрНС: β, ε и voc вычисляется значение Dp, которое поступает на вход блока сравнения 8.
в блоке 9 с использованием информации с ПрНС: β, ε, voc и Н и СРП: v0, с, N, nоч, вычисляется первое значение tу, которое, в свою очередь, поступает на управляющие входы блока формирования дальности рубежа 7 и блока сравнения 8. В блоке 7 по управляющим сигналам tу и Dу (с блока 8) с использованием информации с ПрНС: β, ε и voc вычисляется значение Dp, которое поступает на вход блока сравнения 8.
На вход блока 8, кроме управляющих сигналов с блока 7 Dp и блока 9 tу дополнительно поступает информация с ПрНС: , а также задаваемое летчиком, исходя из типа ОС и условий полета, значение nос, а с СРП hпотр. В блоке осуществляется сравнение полученного значения h с заданным hпотр. При  идет следующая итерация с шагом по Dy. Цикл повторяется до выполнения условий ε≤εтреб.
идет следующая итерация с шагом по Dy. Цикл повторяется до выполнения условий ε≤εтреб.
Методы решения нелинейных алгебраических уравнений с заданной точностью широко известны, в частности [8].
При выполнении условия ε≤εтреб, т.е. по окончанию процесса итерации сигнал Dу со второго выхода блока 8 замыкает контур блока 10, на выходе которого получаем сигнал Dнм, и Dн, который поступает соответственно в систему управления ОС 12, а разрешающий сигнал на стрельбу (при D≤Dн) - на третий вход ПУ 14.
В качестве примечания следует отметить, что для уменьшения количества решающих элементов в блоке 10 при формировании сигнала в нем предусмотрен второй вариант, когда используются промежуточные сигналы: sinq с выхода косинусно-синусного преобразователя (блок 7) и cosψн с выхода СУМ (блок 7).
Более подробное описание работы устройства 6 приведено ранее.
При приближении атакующей УР на дальность D=Dн ПУ производит очередь длиной nоч, а по окончании стрельбы на дальности D=Dнм, соответствующей последнему выстрелу, ОС начинает осуществлять кратковременный маневр с перегрузкой nос.
Положим, фронтовой истребитель (ФИ), оснащенный СОЗ на базе двух 6-мм пулеметов ТКБ-764 (N∑=20000 выстр./мин, v0=1050 м/с), атакован УР типа «Сайдвиндер» со стороны задней полусферы (q=180°), vp=700 м/с, voc=200 м/с.
В соответствии с таблицей для УР типа «AMRAAM» hпотр=18 м. Принимая в качестве допустимой перегрузку nос=6 ед., входим в номограмму (фиг.6), из которой следует, что ФИ должен начать маневр на Dу=180 м. Это соответствует относительной дальности последнего выстрела и соответственно дальности начала маневра Dн=Dнм=335 м. Тогда стрельбу полусекундной очередью необходимо начать на дальности Dнс=335+0.5·500=585 м.
Предлагаемый способ и реализующая его СОЗ могут использовать любую пулеметную или пушечную установку, размещенную на ЛА, а в перспективе - боевую лазерную установку [9, 10].
Наиболее эффективно использование способа для защиты задней полусферы легких маневренных носителей, например, фронтовых истребителей, оснащенных СОЗ на базе пулеметов, поскольку позволяет решить задачу при жестких габаритно-массовых ограничениях. Например, для СОЗ на базе пулеметов ТКБ-764 масса группы вооружения составит Gпв=220 кг при сравнительно небольшом силовом воздействии оружия на носитель (Fотд=2000 кг) против Gпв=500-1000 кг и Fотд=4000-8000 кг для СОЗ, построенной на базе пушек.
Использование заявляемого способа и реализующей его системы обеспечит по сравнению с существующими следующие преимущества.
- Повышение выживаемости ЛА, см. фиг.7.
- Кроме того, дополнительно следует отметить снижение массо-габаритных характеристик группы оборонительного пулеметного (пушечного) вооружения за счет возможности использования наиболее «слабого» типа поражения, который может быть обеспечен даже «легкими» пулеметными установками, а также связанное с этим снижение усилия отдачи при стрельбе, в случае использования для защиты ЛА боевых лазерных установок - снижение их потребной мощности, а отсюда массо-габаритных характеристик и стоимости.
Источники информации
1. В.К.Бабич. «Авиация в локальных войнах», М., Воениздат, 1988, стр.165-166.
2. В.Е.Руднев. Учебное пособие по курсу «Эффективность бортовых комплексов оснащения ЛА», М., МАИ, 1975, стр.68-69.
3. Новости зарубежной науки и техники. Системы авиационного вооружения, №11, 1987; стр.19-21.
4. Р.Д.Кузьминский. Управляемое ракетное оружие авиации ч.I. Ракеты класса «воздух-воздух» (конспект лекций), М., МАИ, 1975.
5. Р.В.Мубаракшин, В.М.Балуев, Б.В.Воронов. «Прицельные системы стрельбы», ч.I, М., «Издание ВВИА им. проф. Н.Е.Жуковского, 1973, стр.78-90, 96-97.
6. А.С.Мальгин. Управление огнем зенитных ракетных комплексов М., Воениздат, 1976.
7. Е.Д.Горбацевич, Ф.Ф.Левинзон. «Аналоговое моделирование систем управления», М., изд. «Наука», 1984.
8. Е.А.Архангельский, А.А.Знаменский и др. «Моделирование на аналоговых вычислительных машинах», Ленинград, изд. «Энергия», стр.105-114.
9. А.Демин. Лазер на полпути к "звездным войнам", журнал "Техника и вооружение", №3, 2004, стр.35-40.
10. "Создание лазера воздушного базирования остается приоритетным проектом в США", Новостная лента АРМС-ТАСС, "Авиация, космос, вооружения", 09.12.03.
11. И.Смыслов. "Боевые лазеры уже испытываются" "Независимое военное обозрение", 16-22 апреля 2004 г., №14 (374).









Изобретение относится к области вооружения и военной техники, в частности к защите самолета от атакующих его управляемых ракет (УР), например, с помощью пулеметных (пушечных) оборонительных установок. Технический результат - повышение выживаемости ЛА путем предельного уменьшения дальности стрельбы системой огневой защиты и обеспечения при этом за счет маневра ЛА необходимого систематического промаха пораженной УР. Поставленная задача достигается тем, что в известном способе защиты летательных аппаратов (ЛА) от УР, включающем поиск, обнаружение и сопровождение УР, определение угловых поправок средства поражения УР для определения его пространственного положения, поражающее воздействие по УР с учетом определенных поправок, согласно изобретению до начала поражающего воздействия средства поражения выделяют наиболее атакоопасную из атакующих УР и определяют потребный промах выделенной УР, дальность начала маневра ЛА Dнм и дальность поражающего воздействия Dн, при этом поражающее воздействие производят на дальности Dн, после чего на дальности Dн.м., определяемой из математического выражения, осуществляют маневр ЛА с допустимой перегрузкой вверх в вертикальной плоскости до пролета УР. Поставленная задача достигается тем, что в известной системе огневой защиты ЛА от УР, содержащей последовательно соединенные обзорно-прицельную систему, бортовой счетно-решающий прибор, силовые привода установки, средство поражения, а также навигационную систему, причем выходы навигационной системы соединены со входами счетно-решающего прибора, согласно изобретению дополнительно введено устройство выбора дальностей маневра и стрельбы, содержащее последовательно соединенные блок формирования дальности рубежа, блок сравнения, блок формирования дальностей маневра и стрельбы, а также блок формирования полетного времени. Причем первый и второй входы блока формирования дальности рубежа соединены соответственно со вторым и третьим выходами обзорно-прицельной системы, третий вход блока формирования дальности рубежа соединен с первым выходом навигационной системы, четвертый его вход соединен с выходом блока формирования полетного времени, а пятый вход блока формирования дальности рубежа - с первым выходом блока сравнения, первый вход которого соединен с первым выходом обзорно-прицельной системы, на второй и третий его входы подаются сигналы с задатчиков соответственно потребного значения промаха и допустимой перегрузки ЛА. Четвертый вход блока сравнения соединен с выходом блока формирования полетного времени, первый и второй входы блока формирования полетного времени соединены соответственно со вторым и третьим выходами обзорно-прицельной системы, третий его вход соединен с первым выходом блока сравнения, четвертый и пятый входы блока формирования полетного времени соединены соответственно с первым и вторым выходами навигационной системы, на шестой и седьмой его входы поступают сигналы с задатчиков значения соответственно баллистического коэффициента с и начальной скорости снаряда. Первый вход блока формирования дальностей маневра и стрельбы соединен с первым выходом навигационной системы, второй, третий и четвертый его входы соединены соответственно со вторым, третьим и первым выходами обзорно-прицельной системы, на пятый, шестой и седьмой входы блока формирования дальностей маневра и стрельбы поступают сигналы с задатчиков соответственно темпа стрельбы N, длины очереди и скорости ракеты, девятый его вход - с выходом блока формирования полетного времени, а десятый - с шестым выходом навигационной системы, первый выход блока формирования дальностей маневра и стрельбы соединен со входом системы управления ЛА, а второй его выход - со входом средства поражения. 2 н. и 8 з.п. ф-лы, 8 ил., 1 табл.





где hпотр - потребный промах наиболее атакоопасной идентифицированной УР, м;
Dнм - дальность начала маневра ЛА;
Dн - дальность поражающего воздействия;
Dу, Dp - соответственно упрежденная дальность последнего выстрела и дальность рубежа, м;
tу - полетное время снаряда, с;
nос - допустимая перегрузка ЛА, ед;
voc, vp - скорости соответственно ЛА и УР, м/с;
β, ε - углы визирования цели в связанной с носителем системе координат, рад;
 - скорость сближения УР и ЛА, м/с;
- скорость сближения УР и ЛА, м/с;
g - ускорение свободного падения, м/с2;
K1 (К2) - коэффициенты аппроксимации tу (Dу), м/с (с/м2);
K1,2=K1,2(CНDу, v01);
V01, cH - соответственно абсолютная скорость и приведенный баллистический коэффициент снаряда, м/с, м2/кгс;
nоч - длина очереди, выстр.;
N - темп стрельбы, выстр./мин.
 и с задатчиком требуемого промаха hпотр.
и с задатчиком требуемого промаха hпотр.| МУБАРАКШИН Р.В | |||
| и др | |||
| Прицельные системы стрельбы | |||
| Ч | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ВВИА им | |||
| проф | |||
| Н.Е.Жуковского, 1973, с.78-90, 96-97 | |||
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| БОЕВАЯ МАШИНА | 1996 |
|
RU2108532C1 |
| DE 3103919 A1, 02.05.1985 | |||
| Аза-арил-1Н-пиразол-1-ил-сульфонамиды | 2013 |
|
RU2627268C2 |
| US 5065286 A, 05.11.1991. | |||

