Изобретение относится к области вооружения и военной техники, в частности к стрельбе из артиллерийского вооружения боевой машины (БМ).
Анализ литературы показывает, что существуют способы стрельбы с обеспечением заданных точности, устойчивости и быстродействия работы системы за счет повышения коэффициента усиления разомкнутого контура, повышения степени астатизма, применения регулирования по производным от ошибки /1, Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования, стр.324/.
Для реализации этого способа в структуру системы вводят корректирующие фильтры или изменяют параметры имеющихся корректирующих фильтров /1, Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования, стр.325-328, 333-335/.
Недостатком этого способа и реализующей его системы является необходимость изменения структуры и параметров контура, в частности силовых приводов, которые уже оптимально сформированы применительно к решению других задач (слежение за целью, наведение) различных видов артиллерийского вооружения, входящих в единый блок оружия (единый стабилизатор). Кроме того, введение корректирующих фильтров имеет свои недостатки. В частности, увеличение коэффициента усиления контура, уменьшая установившуюся статическую ошибку, может привести к повышению колебательности переходного процесса и соответственно к увеличению времени переходного процесса, т.е. к снижению быстродействия.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ стрельбы вооружения боевой машины по цели, заключающийся в обнаружении и распознавании цели, взятии на сопровождение и сопровождении цели, определении угловых поправок стрельбы из математических выражений, отклонении с учетом их стволов оружия относительно линии визирования и стрельбе по цели /2, Патент России № 2172463. Способ стрельбы боевой машины по цели и система для его реализации. Шипунов А.Г., Березин С.М., Богданова Л.А. 20.08.2001. Бюл. №23 от 20.08.2001 (прототип)/.
Известная система стрельбы боевой машины по цели, выбранная в качестве прототипа заявляемой системы, содержит обзорно-прицельную и навигационную системы, блок данных о внешней среде, последовательно соединенные бортовую вычислительную систему (ВС), включающую в свой состав, в свою очередь, блок выработки углов прицеливания и деривации и блок формирования углов упреждения, затем силовые приводы стабилизатора и артиллерийскую установку /2, Патент России № 2172463. Способ стрельбы боевой машины по цели и система для его реализации. Шипунов А.Г., Березин С.М., Богданова Л.А. 20.08.2001. Бюл. №23 от 20.08.2001 (прототип)/.
Особенности конструктивного исполнения автомата заряжания, в частности вертикальное расположение выстрелов, обуславливает необходимость отработки больших углов заряжания. Кроме того, применение цифрового стабилизатора с существенно расширенной полосой пропускания (БМП-3⇒БМД-4) ужесточило требования к темпу стрельбы и привело к тому, что функционирование оружия (стрельба) проходит в неустановившихся режимах, в особенности в режиме "серия", предполагающем заданный темп стрельбы.
При отработке управляющего сигнала приводом в виде ступенчатого воздействия Δα·1(t), где Δα - управляющий сигнал, обеспечивающий требуемый угол переброса ствола, например, от угла заряжания αзар до угла прицеливания α0, для выполнения требования по точности δ<δдоп=0,5 т.д. время переходного процесса составляет десятки секунд. В режиме "серия" для обеспечения необходимого темпа (N=10-12 выстр/мин) приходится осуществлять стрельбу при перерегулировании, что приводит к снижению точности.
Таким образом, недостатком вышеописанного способа и реализующей его системы при существующем конструктивном решении является невозможность одновременного обеспечения требований, предъявляемых к точности и быстродействию системы при стрельбе 100-мм снарядом, в особенности при стрельбе "серией".
Задачей предлагаемого способа и реализующей его системы является обеспечение заданных требований по точности и быстродействию вооружения боевых машин путем улучшения характеристик переходных процессов, сопровождающих процессы подготовки и осуществления стрельбы и обусловленных необходимостью отработки скачкообразных (ступенчатых) управляющих воздействий, см. фиг.1.
Поставленная задача достигается тем, что в известном способе стрельбы вооружения боевой машины по цели, включающем обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели, определение угловых поправок стрельбы из математических выражений, отклонение с учетом их стволов оружия относительно линии визирования в соответствии с управляющим сигналом и стрельбу по цели, согласно изобретению до начала стрельбы определяют пороговое значение управляющего сигнала (Δαпор) на отклонение ствола оружия, а перед отработкой управляющего сигнала (Δα) на отклонение ствола оружия производят его сравнение с пороговым значением Δαпор и в случае превышения порогового значения Δα>Δαпор устанавливают требуемый уровень управляющего сигнала по предварительно задаваемому дополнительному управляющему сигналу, который формируют с учетом характеристик стабилизатора вооружения комбинированным во времени (t) с двумя временными участками, причем на первом участке - в виде линейной зависимости, на втором участке - в виде квадратичной, из соотношений:

где αнач - начальное угловое положение ствола, рад;
αкон - конечное угловое положение ствола, рад;
ωрац - рациональная скорость изменения дополнительного управляющего сигнала, рад/с;
α - формируемый дополнительный управляющий сигнал для отработки Δα, рад;
Δα1 - величина угла, отрабатываемого на первом участке, рад;
Δα2=f(Δα) - величина угла, отрабатываемого на втором участке, рад;
 , рад/с;
, рад/с;
b=-ωрац, рад/с2.
Поставленная задача достигается также тем, что в известной системе стрельбы вооружения боевой машины по цели, содержащей обзорно-прицельную систему, навигационную систему, блок данных о внешней среде, оружие с силовыми приводами, бортовую вычислительную систему, включающую в свой состав блок выработки углов прицеливания и деривации и устройство формирования углов упреждения, входы которых соединены через соответствующие входы бортовой вычислительной системы с выходами обзорно-прицельной, навигационной систем и блока данных о внешней среде, согласно изобретению дополнительно введены последовательно соединенные блок управления и устройство формирования дополнительного управляющего сигнала, первый и второй входы которого соединены соответственно с первым и вторым выходами бортовой вычислительной системы, а первый, второй, третий и четвертый выходы соединены с первыми входами приводов соответственно вертикального и горизонтального наведения артиллерийской установки.
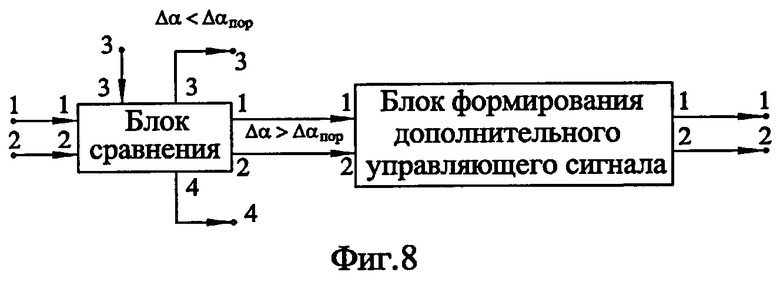
В частном случае устройство формирования дополнительного управляющего сигнала выполнено в виде последовательно соединенных блока сравнения и блока формирования дополнительного управляющего сигнала, при этом первым и вторым выходами устройства формирования дополнительного управляющего сигнала являются соответственно первый и второй выходы блока формирования дополнительного управляющего сигнала, третьим и четвертым выходами являются соответственно третий и четвертый выходы блока сравнения, а первым, вторым и третьим входами являются соответственно первый, второй и третий входы блока сравнения.
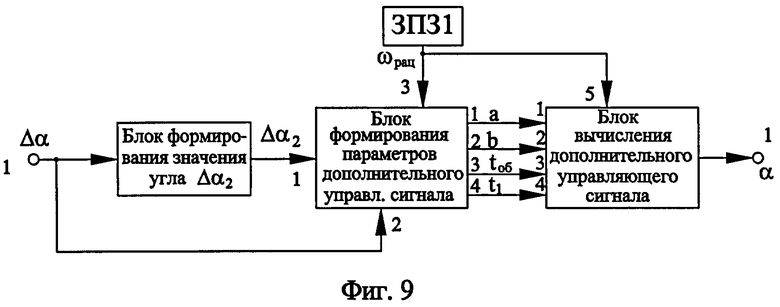
Блок формирования дополнительного управляющего сигнала выполнен в виде последовательно соединенных блока формирования значения угла на втором участке и блока формирования параметров дополнительного управляющего сигнала, четыре выхода которого соединены с четырьмя входами блока вычисления дополнительного управляющего сигнала, пятый вход которого и третий вход блока формирования параметров дополнительного управляющего сигнала соединены с выходом первого задатчика постоянного значения (ЗПЗ), при этом входом блока формирования дополнительного управляющего сигнала является вход блока формирования значения угла на втором участке, соединенный со вторым входом блока формирования параметров дополнительного управляющего сигнала, а выходом - выход блока вычисления дополнительного управляющего сигнала.
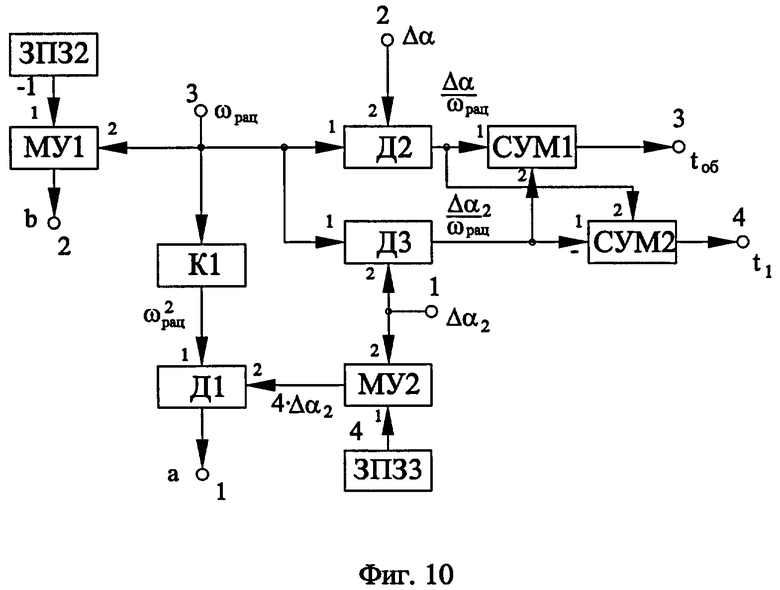
Блок формирования параметров дополнительного управляющего сигнала выполнен в виде последовательно соединенных первого квадратора (К1) и первого делителя (Д1), последовательно соединенных второго задатчика постоянного значения (ЗПЗ2) и первого множительного устройства (МУ1), последовательно соединенных второго делителя (Д2) и первого сумматора (СУМ1), последовательно соединенных третьего делителя (Д3) и инверсного входа второго сумматора (СУМ2), последовательно соединенных третьего задатчика постоянного значения (ЗПЗ3) и второго множительного устройства (МУ2), причем выход Д2 соединен со вторым входом СУМ2, выход Д3 соединен со вторым входом СУМ1, выход МУ2 - со вторым входом Д1, первым входом блока формирования параметров дополнительного управляющего сигнала являются входы Д3 и МУ2, вторым входом - вход Д2, третьим входом - входы МУ1, К1, Д2, Д3, первым выходом - выход Д1, вторым выходом - выход МУ1, третьим выходом - выход СУМ1, четвертым выходом - выход СУМ2.
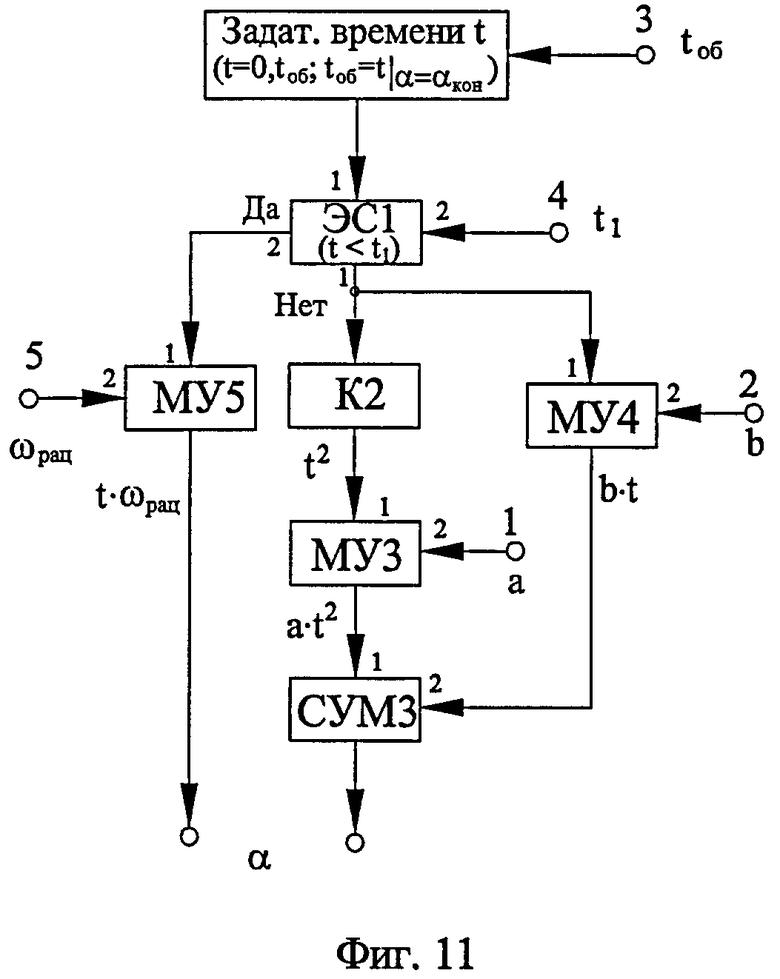
Блок вычисления дополнительного управляющего сигнала выполнен в виде последовательно соединенных задатчика времени, первого элемента сравнения (ЭС1), второго квадратора (К2), третьего множительного устройства (МУ3) и третьего сумматора (СУМ3), второй вход которого соединен с выходом четвертого множительного устройства (МУ4), входом соединенного с первым выходом ЭС1, а также пятого множительного устройства (МУ5), первый вход которого соединен со вторым выходом ЭС1, при этом первым входом блока вычисления дополнительного управляющего сигнала является второй вход МУ3, вторым входом - второй вход МУ4, третьим входом - вход задатчика времени, четвертым входом - второй вход ЭС1, пятым входом - второй вход МУ5, а выходом блока - выход СУМ3 и выход МУ5.
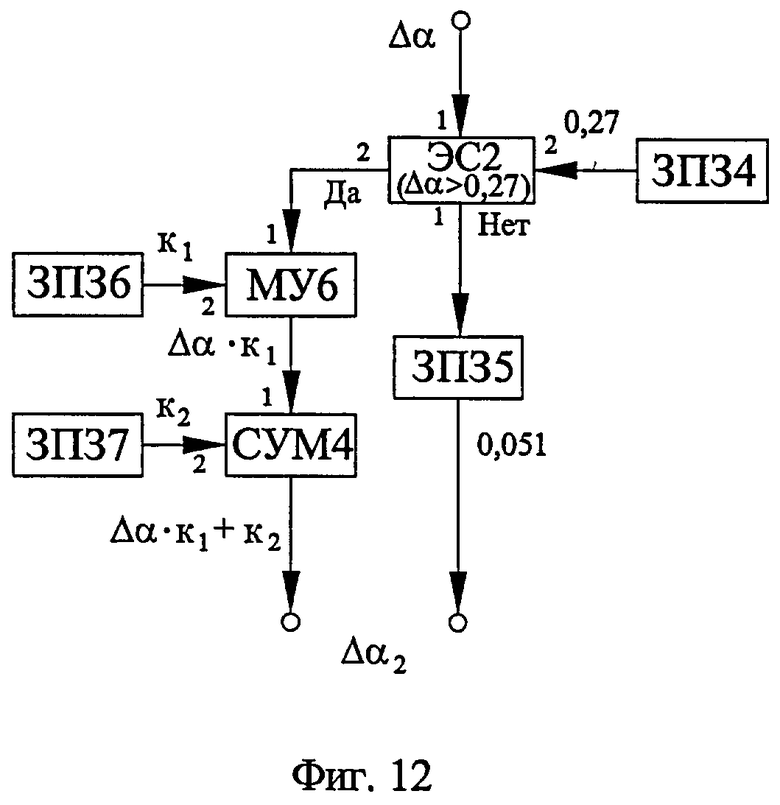
Блок формирования значения угла на втором участке выполнен в виде последовательно соединенных четвертого задатчика постоянного значения (ЗПЗ4), второго элемента сравнения (ЭС2), пятого задатчика постоянного значения (ЗПЗ5) и последовательно соединенных шестого множительного устройства (МУ6), первым входом, соединенного с вторым выходом ЭС2, и четвертого сумматора (СУМ4), вторые входы которых соединены соответственно с выходами шестого и седьмого задатчиков постоянного значения (ЗПЗ6) и (ЗПЗ7), при этом входом блока является первый вход ЭС2, а выходом - выход СУМ4 и выход ЗПЗ5.
Именно сформированный с помощью устройства формирования дополнительного управляющего сигнала сигнал обеспечивает согласно способу одновременно минимальное время переходного процесса при подготовке к выстрелу и точность при стрельбе при существующей структуре системы управления БМ и тем самым достижение цели изобретения. Это позволяет сделать вывод о том, что заявляемые изобретения связаны между собой единым изобретательским замыслом.
Сопоставительный анализ заявленных решений с прототипом показывает, что заявляемый способ отличается от известного тем, что до начала стрельбы, исходя из характеристик стабилизатора, определяют структуру и параметры дополнительного управляющего сигнала, предназначенного для выхода на требуемый уровень управляющего сигнала.
Предлагаемая группа изобретений поясняется чертежами.
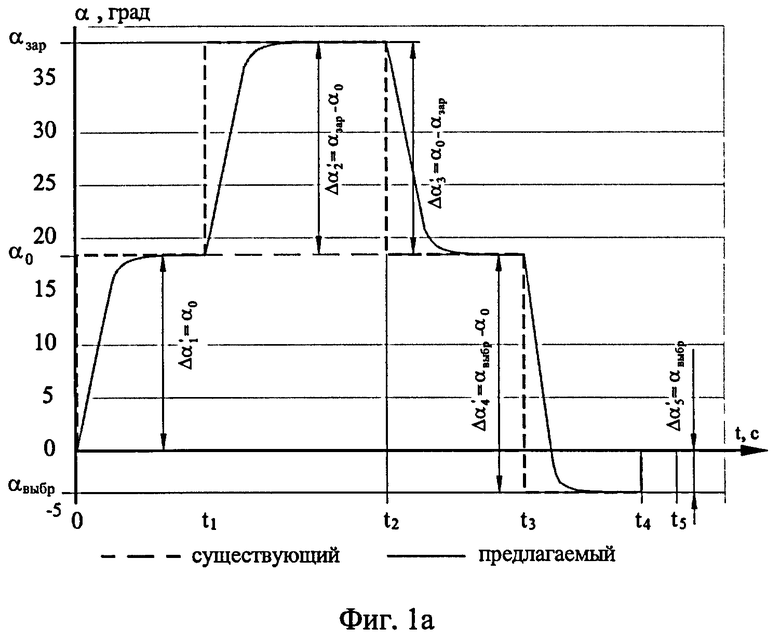
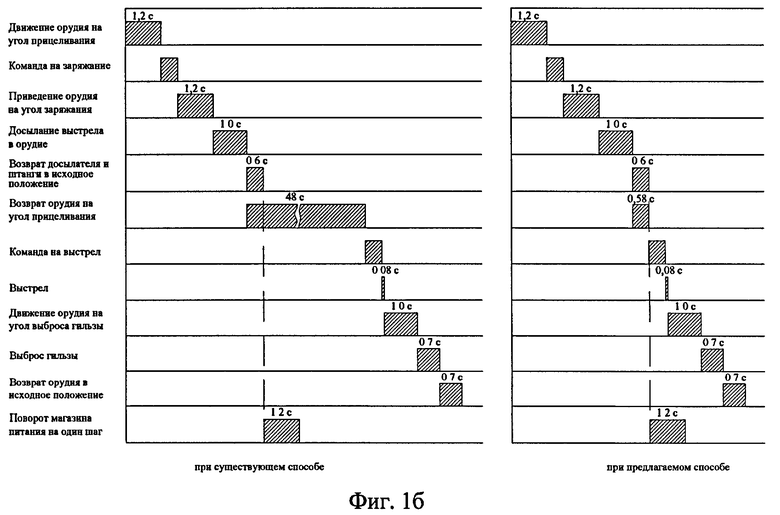
На фиг.1 представлены вид управляющего сигнала, подаваемого на вход силовых приводов стабилизатора, циклограммы работы привода вертикального наведения при стрельбе из 100-мм пушки неуправляемыми снарядами до и после введения дополнительного (комбинированного) управляющего сигнала для угла прицеливания α=18°.
На фиг.2 представлены зависимости времени переходного процесса от скорости изменения линейного управляющего сигнала ω при разных значениях угла переброса ствола Δα.
На фиг.3 приведены зависимости рациональной скорости ωрац от требуемого угла переброса ствола Δα.
На фиг.4 представлена схема формирования дополнительного управляющего сигнала предлагаемым способом.
На фиг.5 приведен график зависимости значения угла Δα2 от угла переброса ствола Δα при ωрац=0,85 рад/с.
На фиг.6 представлены графики входных и выходных сигналов привода при формировании управляющего сигнала 1 - в виде ступенчатого воздействия, 2 - по линейному закону, 3 - предлагаемым способом.
На фиг.7 представлена структурная схема системы стрельбы боевой машины.
На фиг.8 приведена структурная схема устройства формирования дополнительного управляющего сигнала.
На фиг.9 приведена структурная схема блока формирования дополнительного управляющего сигнала α.
На фиг.10 приведена структурная схема блока формирования параметров дополнительного управляющего сигнала.
На фиг.11 приведена структурная схема блока вычисления дополнительного управляющего сигнала.
На фиг.12 приведена структурная схема блока задания значения угла Δα2.
В соответствии с руководством по эксплуатации /3/ порядок работы при стрельбе неуправляемыми снарядами 100-мм орудия БМ следующий: измерение дальности до цели, расчет и отработка стволом угла прицеливания, отработка угла заряжания, далее возвращение на угол прицеливания, стрельба, отработка угла выброса гильзы, возвращение в согласованное с линией визирования положение, см. циклограмму, представленную на фиг.1б. Таким образом, при стрельбе, например, 100-мм неуправляемыми снарядами, управляющие сигналы на привод и соответственно отрабатываемые углы переброса стволов Δα могут достигать значений 35-40°. При этом управляющие воздействия носят ступенчатый характер, см. фиг.1.
С другой стороны, использование в приводах стабилизатора вооружения БМД-4 по сравнению с БМП-3 вентильных бесколлекторных двигателей с цифровым управлением привело к увеличению полосы пропускания с 2-3 Гц (БМП-3) до 50-60 Гц и максимальной скорости наведения до 60°/с против 35°/с (БМП-3). Это обусловило повышение колебательности контура, появление перерегулирований и соответственно более длительное вхождение в разрешенную зону стрельбы. Традиционно величина зоны разрешения стрельбы для бронетанковой техники определяется отклонением ±0,5 т.д.
В качестве примера рассмотрим стрельбу 100-мм снарядами в режиме "серия". При обеспечении темпа стрельбы N=10-12 выстр/мин разрешение на выстрел поступает при первом вхождении в окрестность |δ|<0,5 т.д. отрабатываемого угла переброса ствола. Выстрел в этом случае производится через время запаздывания tзап в момент углового положения ствола, значительно превышающего требуемый угол, т.е. при перерегулировании выходного сигнала, приводя к ошибке по дальности до сотен метров.
Объясняется это следующим. Время tзап включает время срабатывания электромагнита пушки, время срабатывания ударника, время воспламенения капсюля, время от воспламенения капсюля до начала движения снаряда по стволу, время движения снаряда по стволу (в соответствии с внутрибаллистическими процессами для рассматриваемого типа снаряда). Для пушки 2А70 при стрельбе снарядом 3УОФ19 время tзап=54-74 мс.
В таблице 1 в качестве примера приведены результаты моделирования процесса стрельбы из 100-мм орудия для разных углов Δα (снаряд 3УОФ19).
Графики зависимости времени переходного процесса от скорости изменения линейного управляющего сигнала для разных углов переброса Δα представлены на фиг.2. Как следует из графиков, переход от ступенчатого управляющего сигнала к сигналу, изменяющемуся по линейному закону с постоянной рациональной скоростью ωрац, позволяет значительно уменьшить время переходного процесса. При этом значение рациональной скорости ωрац для большого диапазона углов переброса ствола Δα находится в узком интервале. (Рациональная скорость ωpaц - скорость изменения линейного сигнала, при которой обеспечивается минимальное время переходного процесса.). График зависимости значения рациональной скорости ωрац от угла Δα представлен на фиг.3. Здесь ωрац составляет 0,8-0,85 рад/с для большого диапазона рассматриваемых углов переброса. Причем оптимум тем более выражен, чем больше угол переброса Δα.
Однако при использовании управляющего сигнала, изменяющегося по линейному закону, значение величины перерегулирования даже возрастает по сравнению со ступенчатым сигналом.
Для устранения перерегулирования рассмотрена также реакция привода на управляющий сигнал, изменяющийся с постоянным ускорением. Формирование подобного управляющего сигнала позволяет получить выходной сигнал без перерегулирования, но в этом случае время переходного процесса по сравнению с линейным сигналом увеличивается в 5-7 раз.
Дальнейшее исследование показало, что формирование управляющего сигнала целесообразно осуществлять двумя участками: последовательным применением линейной и квадратичной зависимостей. Это позволяет получить переходный процесс с высоким быстродействием и без перерегулирования.
Таким образом, управляющий сигнал формируется комбинированный: на первом участке - в виде линейной зависимости на интервале времени [0, t1], на втором участке - в виде квадратичной зависимости на интервале времени [t1, t2] из соотношений:
 ,
,
где  ,
,
 ,
,
 .
.
Зависимость значения угла Δα2 от угла Δα Δα2=f(Δα) определяется предварительно до стрельбы для конкретного привода из условия отсутствия перерегулирования в выходном сигнале при минимальной длительности второго участка при стремлении Δα2→min.
Зависимости, по которым производится расчет значений параметров управляющего сигнала, получены из геометрической интерпретации квадратичного участка как части параболы с вертикальной осью симметрии, ордината вершины которой соответствует требуемому значению угла упреждения, абсцисса вершины параболы - времени действия квадратичного управляющего сигнала (на втором участке от t1 до t2).
Графическая схема формирования управляющего сигнала предлагаемым способом представлена на фиг.4.
Расчетные зависимости представлены ниже.
b=-ωрац,
Δα=αкон-αнач.
Таким образом, при формировании управляющего сигнала предлагаемым способом обеспечивается рациональное сочетание быстродействия при отработке требуемого угла переброса и точности стрельбы путем выбора во-первых, рационального значения скорости изменения управляющего сигнала на первом линейном участке ω=ωрац и во-вторых, выбором значения угла Δα2, отрабатываемого на втором участке Δα2=f(Δα). Вид и параметры функциональной зависимости f определяются предварительно до начала стрельбы для конкретного привода (см. фиг.5).
После проведенных подготовительных операций сформированный дополнительный управляющий сигнал выдается на привод.
В таблице 2 приведены значения времени переходного процесса в приводе вертикального наведения при отработке различных углов прицеливания и формировании управляющего сигнала предлагаемым способом, т.е. при комбинированном управлении.
На фиг.6 представлены графики управляющих сигналов при трех способах их задания: 1 - ступенчатое воздействие, 2 - линейный сигнал, 3 - предлагаемый вид сигнала: комбинированное управляющий сигнал и соответствующие им сигналы на выходе привода на примере угла прицеливания α0=309 мрад (Δα=365 мрад, D=5 км).
Однако, как видно из фиг.2, вводить дополнительный управляющий сигнал имеет смысл, начиная только при значении потребных углов переброса, превышающих некоторое пороговое значение Δαпор.
Поэтому перед отработкой управляющего сигнала Δα производят сравнение Δα с пороговым значением Δαпор и, в случае превышения порогового уровня, выходят на требуемый уровень управляющего сигнала по ранее сформированному дополнительному управляющему сигналу.
Таким образом, предлагаемый способ формирования переднего фронта управляющего сигнала (или дополнительного управляющего сигнала) позволяет уменьшить время переходного процесса с десятков секунд до одной секунды и менее; устранить перерегулирование, обеспечив плавное вхождение в зону разрешения |δ|<δдоп, и соответственно повысить точность стрельбы, что особенно важно в режиме "серия" с требуемым темпом N=10-12 выстр/мин.
Для подтверждения технической реализуемости далее представлен пример функционирования заявляемого устройства.
Управляющий сигнал на выходе блока формирования дополнительного управляющего сигнала формируется следующим образом (см. фиг.8).
На первый и второй входы блока сравнения с соответствующих выходов вычислительной системы поступают сигналы углов прицеливания α0, на третий вход блока сравнения с блока управления - значения углов заряжания αзар и выброса гильзы αвыбр.гил.. В соответствие с циклограммой работы привода в блоке сравнения формируются значения угла αнач из множества {0, α0, αзар, α0, αвыбр.гил.} и соответствующее ему значение αкон из множества {α0, αзар, α0, αвыбр.гил., 0}. Вычисляется значение управляющего сигнала, обеспечивающего требуемый угол переброса ствола, Δα=αкон-αнач, и сравнивается с пороговым значением сигнала Δαпор, определенным предварительно для конкретного привода.
Если значение Δα меньше Δαпор, то значение управляющего сигнала поступает с третьего - четвертого выхода блока сравнения на первые входы приводов по соответствующему каналу.
Если значение Δα больше Δαпор, то значение Δα с первого - второго выходов блока сравнения поступает на первый - второй входы блока формирования дополнительного управляющего сигнала, с выходов которого сформированные дополнительные управляющие сигналы поступают на первые входы силовых приводов стабилизатора вооружения.
Сигнал на выходе блока формирования дополнительного управляющего сигнала формируется следующим образом (см. на фиг.9).
На вход блока формирования значения угла Δα2 с выхода блока сравнения поступает значение управляющего сигнала, обеспечивающего требуемый угол переброса ствола Δα.
С выхода блока значение угла Δα2 поступает на первый вход блока формирования параметров дополнительного управляющего сигнала. Одновременно на второй его вход с блока сравнения поступает значение Δα, а на третий вход с выхода первого задатчика постоянного значения ЗПЗ1 - значение рациональной скорости ωрац, которое также поступает на пятый вход блока вычисления дополнительного управляющего сигнала. Одновременно с ним с выходов блока формирования параметров дополнительного управляющего сигнала на соответствующие входы поступают сформированные значения сигналов a, b, tоб, t1.
На выходе блока вычисления дополнительного управляющего сигнала - выходе блока формируется дополнительный управляющий сигнал.
Блок формирования параметров дополнительного управляющего сигнала построен на аналоговых элементах (фиг.10).
Значение рациональной скорости ωрац с выхода первого задатчика постоянного значения ЗПЗ1 поступает на вход первого квадратора К1, на первые входы второго и третьего делителя Д2, Д3 и на второй вход первого множительного устройства МУ1, на первый вход которого со второго задатчика постоянного значения ЗПЗ2 поступает сигнал, равный -1. На выходе МУ1 - втором выходе рассматриваемого блока формируется значение параметра дополнительного управляющего сигнала b, равное произведению - 1·ωрац.
С выхода К1 сигнал  поступает на первый вход первого делителя Д1, одновременно на второй вход которого с выхода второго множительного устройства МУ2 поступает произведение сигналов Δα2 и 4. Для получения данного произведения на второй вход МУ2 с выхода соответствующего блока поступает значение угла Δα2, на первый вход МУ2 с выхода третьего задатчика постоянного значения ЗПЗ3 - сигнал, равный 4. На выходе Д1 - первом выходе блока формируется значение параметра дополнительного управляющего сигнала а как частное, равное
поступает на первый вход первого делителя Д1, одновременно на второй вход которого с выхода второго множительного устройства МУ2 поступает произведение сигналов Δα2 и 4. Для получения данного произведения на второй вход МУ2 с выхода соответствующего блока поступает значение угла Δα2, на первый вход МУ2 с выхода третьего задатчика постоянного значения ЗПЗ3 - сигнал, равный 4. На выходе Д1 - первом выходе блока формируется значение параметра дополнительного управляющего сигнала а как частное, равное  .
.
Значение угла Δα2 с выхода соответствующего блока также поступает на второй вход Д3. Частное  с выхода ДЗ поступает на первый инверсный вход второго сумматора СУМ2 и на второй вход первого сумматора СУМ1. На второй вход Д2 с выхода блока сравнения поступает значение Δα. Частное
с выхода ДЗ поступает на первый инверсный вход второго сумматора СУМ2 и на второй вход первого сумматора СУМ1. На второй вход Д2 с выхода блока сравнения поступает значение Δα. Частное  с выхода Д2 поступает на первый вход СУМ1 и на второй вход СУМ2. На выходе СУМ1 - третьем выходе блока формируется сигнал tоб, равный
с выхода Д2 поступает на первый вход СУМ1 и на второй вход СУМ2. На выходе СУМ1 - третьем выходе блока формируется сигнал tоб, равный  , на выходе СУМ2 - четвертом выходе блока формируется сигнал t1, равный разности
, на выходе СУМ2 - четвертом выходе блока формируется сигнал t1, равный разности  .
.
Блок вычисления дополнительного управляющего сигнала построен на аналоговых элементах (фиг.11).
С выхода задатчика времени t на первый вход первого элемента сравнения ЭС1 поступает значение времени, начиная с нулевого значения до значения tоб, поступающего на вход задатчика с третьего выхода блока формирования параметров дополнительного управляющего сигнала, с шагом Δt, определяемым как  , где f - требуемая частота формирования управляющего сигнала. На второй вход ЭС1 с четвертого выхода блока формирования параметров дополнительного управляющего сигнала поступает значение времени t1.
, где f - требуемая частота формирования управляющего сигнала. На второй вход ЭС1 с четвертого выхода блока формирования параметров дополнительного управляющего сигнала поступает значение времени t1.
Если значение t меньше значения t1, то со второго выхода ЭС1 значение времени t поступает на первый вход пятого множительного устройства МУ5, на второй вход которого с выхода ЗПЗ1 поступает значение ωрац. На выходе МУ5 формируется произведение ωрац·t.
В этом случае на выходе блока формирования дополнительного управляющего сигнала - на первом входе соответствующего привода формируется управляющий сигнал, изменяющийся по линейной зависимости.
Если значение t больше значения t1, то значение t с первого выхода ЭС1 поступает на вход второго квадратора К2 и на первый вход четвертого множительного устройства МУ4. На второй вход МУ4 со второго выхода блока формирования параметров дополнительного управляющего сигнала поступает значение параметра b. На выходе МУ4 формируется произведение b·t.
С выхода К2 квадрат значения времени t2 поступает на первый вход третьего множительного устройства МУ3, на второй вход которого с первого выхода блока формирования параметров дополнительного управляющего сигнала поступает значение параметра а. Произведение а·t2 с выхода МУ3 поступает на первый вход третьего сумматора СУМ3, на второй вход которого с выхода МУ4 поступает сигнал bt. На выходе СУМ3 формируется сумма сигналов а·t2+bt. В этом случае на выходе блока формирования дополнительного управляющего сигнала на первом входе соответствующего привода формируется дополнительный управляющий сигнал, соответствующий второму участку - изменяющийся по квадратичной зависимости.
Блок задания значения угла Δα2 построен на аналоговых элементах (см. фиг.12).
На первый вход второго элемента сравнения ЭС2 с выхода блока сравнения поступает значение управляющего сигнала, обеспечивающего требуемый угол переброса ствола Δα, и сравнивается с сигналом, поступающим на второй вход ЭС2 с четвертого задатчика постоянного значения ЗПЗ4 и равного 0,27. Если значение Δα больше опорного, то на выходе блока задания значения угла Δα2 формируется значение, равное 0,051 рад. Если меньше, то сигнал Δα поступает на первый вход шестого множительного устройства МУ6, на второй вход которого поступает сигнал с шестого задатчика постоянного значения ЗПЗ6, равный значению коэффициента к1 для соответствующего участка. Произведение Δα·к1 с выхода МУ6 поступает на первый вход четвертого сумматора СУМ4, на второй вход которого поступает сигнал с седьмого задатчика постоянного значения ЗПЗ7, равный значению коэффициента к2. В этом случае на выходе блока задания значения угла Δα2 - выходе СУМ4 формируется сигнал Δα·к1+к2.
В качестве примера реализации рассмотрен процесс стрельбы неуправляемыми снарядами из 100-мм орудия по наземной цели.
Предварительно до начала стрельбы выбирается тип боеприпаса.
После наведения на цель прицела наводчика (или прицела командира), входящего в обзорно-прицельную систему (ОПС), производится измерение дальности до цели лазерным дальномером. Значение дальности поступает в вычислительную систему (ВС).
Предварительно в ВС вводятся данные о снаряде (например, либо в виде таблиц стрельбы, либо в виде таблицы аппроксимирующих коэффициентов). Данные о внешней среде (плотность и температура воздуха, скорость продольного и поперечного ветра) либо вводятся с соответствующих датчиков, либо используется информация с метеобюллетеней, заведенная предварительно в ВС.
Для заявляемого способа (и устройства) должны быть предусмотрены введение значения угла заряжания 100-мм орудия, угла выброса гильзы, значение рациональной скорости ωрац для соответствующего привода, пороговое значение угла Δαпор, параметры дополнительного управляющего сигнала на втором участке в виде таблицы аппроксимирующих коэффициентов (см. таблицу 3).
В вычислительной системе в соответствии с поступившими данными рассчитывается значение угла прицеливания α0 и подается на вход устройства формирования дополнительного управляющего сигнала. В блоке сравнения значение угла прицеливания сравнивается со значением Δαпор.
В случае, если значение α0 больше Δαпор, то значение α0 поступает на вход блока формирования дополнительного управляющего сигнала, с выхода которого сформированный согласно изобретению в виде комбинированного воздействия дополнительный управляющий сигнал поступает на вход привода вертикального наведения. Привод плавно отрабатывает сформированный управляющий сигнал, выставляя ствол пушечной установки на требуемый угол прицеливания. На фиг.1а это соответствует интервалу времени [0, t1].
Далее осуществляется автоматический цикл заряжания пушки. Соответствует интервалу времени [t1, t2].
Для этого наводчик нажимает соответствующую кнопку на пульте управления. На время заряжания стабилизатор отключается от слежения за зеркалом прицела наводчика и с блока управления (БУ) на устройство формирования дополнительного управляющего сигнала поступает значение угла заряжания αзар. Процесс формирования дополнительного управляющего сигнала для выхода на угол заряжания повторяется в соответствии с вышесказанным. Оружие разворачивается на угол заряжания и стопорится. Одновременно производится наклон штанги механизма заряжания с выстрелом заданного типа. Далее автоматически включается привод механизма досылания и происходит заряжание выстрела.
После заряжания стволы блока оружия необходимо выставить на линию стрельбы, т.е. перебросить на угол  , что соответствует интервалу времени [t2, t3], см. фиг.1.
, что соответствует интервалу времени [t2, t3], см. фиг.1.
Для этого привод вертикального наведения переключается в режим слежения за зеркалом прицела наводчика и приводит оружие на угол прицеливания α0 с учетом схемы разрешения стрельбы по сформированному согласно изобретению дополнительному управляющему сигналу. Блок оружия выставляется на угол прицеливания. Наводчик производит выстрел.
После выстрела (интервал времени [t3, t4]) на привод вертикального наведения подается сигнал приведения пушки на угол выброса гильзы αвыбр. Привод приводит блок оружия на угол выброса гильзы, перебрасывая его на 
вышеописанным способом. Откатные части орудия двигаются вперед, открывается клин орудия и гильза экстрактируется в открытый люк выброса.
Далее (в интервале времени [t4, t5]) привод ВН переходит в режим слежения за линией визирования прицела наводчика, перебрасывая блок оружия на угол  в исходное положение. Таким образом, цикл завершен.
в исходное положение. Таким образом, цикл завершен.
Использование заявляемого способа и реализующей его системы обеспечит по сравнению с существующим следующие преимущества:
1. Уменьшается время переходного процесса в приводах стабилизатора с десятков секунд до уровня не превышающего 0,8-0,9 с, что дает возможность обеспечивать стрельбу в режиме "серия" с заявленным темпом. При этом обеспечивается заданная точность стрельбы  т.д.
т.д.
2. Устраняется перерегулирование, обеспечивается плавное вхождение в зону δдоп, что позволяет избежать ударных режимов, предотвращается преждевременный износ конструкции.
Источники информации
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования, М.: "Наука", 1966.
2. Патент России № 2172463. Способ стрельбы боевой машины по цели и система для его реализации. Шипунов А.Г., Березин С.М., Богданова Л.А. Приор. №99115860 от 19.07.99. Бюл. №23 от 20.08.2001.
3. Унифицированное боевое отделение Б8Я01 для машин легкой категории по массе. Руководство по эксплуатации. 4.1. Техническое описание. КБП, 2004.

Изобретение относится к области вооружения и военной техники, в частности к стрельбе из артиллерийского вооружения боевой машины (БМ), например 100 и 30-мм пушек. Технический результат - обеспечение заданных требований по точности и быстродействию комплекса вооружения боевых машин путем улучшения характеристик переходных процессов, сопровождающих процессы подготовки и осуществления стрельбы и обусловленных необходимостью отработки скачкообразных (ступенчатых) управляющих воздействий. Способ заключается в обнаружении и распознавании цели, взятии на сопровождение и сопровождении цели. Также определяют угловые поправки стрельбы из математических выражений, отклоняют с учетом их стволы оружия относительно линии визирования в соответствии с управляющим сигналом и осуществляют стрельбу по цели. До начала стрельбы определяют пороговое значение управляющего сигнала Δαпор, а перед отработкой управляющего сигнала Δα производят его сравнение с пороговым значением Δαпор и в случае превышения порогового уровня Δα>Δαпор выходят на требуемый уровень управляющего сигнала по предварительно сформированному дополнительному управляющему сигналу. 2 н. и 5 з.п. ф-лы, 12 ил., 3 табл.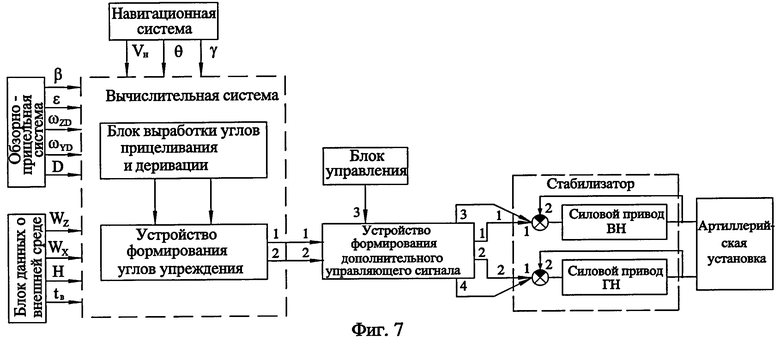
1. Способ стрельбы вооружения боевой машины по цели, включающий обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели, определение угловых поправок стрельбы из математических выражений, отклонение с учетом их стволов оружия относительно линии визирования в соответствии с управляющим сигналом и стрельбу по цели, отличающийся тем, что до начала стрельбы определяют пороговое значение управляющего сигнала (Δαпор) на отклонение ствола оружия, а перед отработкой управляющего сигнала (Δα) на отклонение ствола оружия производят его сравнение с пороговым значением Δαпор и в случае превышения порогового значения Δα>Δαпор устанавливают требуемый уровень управляющего сигнала по предварительно задаваемому дополнительному управляющему сигналу, который формируют с учетом характеристик стабилизатора вооружения комбинированным во времени (t) с двумя временными участками, причем на первом участке - в виде линейной зависимости, на втором участке - в виде квадратичной зависимости из соотношений:
 ,
,
где
αнач - начальное угловое положение ствола, рад;
αкон - конечное угловое положение ствола, рад;
ωрац - рациональная скорость изменения дополнительного управляющего сигнала, рад/с;
α - формируемый дополнительный управляющий сигнал, рад;
Δα1 - угол, отрабатываемый на первом участке, рад;
Δα2=f(Δα) - угол, отрабатываемый на втором участке, рад;
, рад/с,
b=-ωрац, рад/с2.
2. Система стрельбы вооружения боевой машины по цели, содержащая обзорно-прицельную систему, навигационную систему, блок данных о внешней среде, оружие с силовыми приводами, бортовую вычислительную систему, включающую блок выработки углов прицеливания и деривации и устройство формирования углов упреждения, входы которых соединены через соответствующие входы бортовой вычислительной системы с выходами обзорно-прицельной, навигационной систем и блока данных о внешней среде, отличающаяся тем, что она снабжена последовательно соединенными блоком управления и устройством формирования дополнительного управляющего сигнала, первый и второй входы которого соединены соответственно с первым и вторым выходами бортовой вычислительной системы, а первый, второй, третий и четвертый выходы соединены с первыми входами приводов соответственно вертикального и горизонтального наведения артиллерийской установки.
3. Система по п.2, отличающаяся тем, что устройство формирования дополнительного управляющего сигнала выполнено в виде последовательно соединенных блока сравнения и блока формирования дополнительного управляющего сигнала, при этом первым и вторым выходами устройства формирования дополнительного управляющего сигнала являются соответственно первый и второй выходы блока формирования дополнительного управляющего сигнала, третьим и четвертым выходами являются соответственно третий и четвертый выходы блока сравнения, а первым, вторым и третьим входами являются соответственно первый, второй и третий входы блока сравнения.
4. Система по п.3, отличающаяся тем, что блок формирования дополнительного управляющего сигнала выполнен в виде последовательно соединенных блока формирования значения угла на втором участке и блока формирования параметров дополнительного управляющего сигнала, четыре выхода которого соединены с четырьмя входами блока вычисления дополнительного управляющего сигнала, пятый вход которого и третий вход блока формирования параметров дополнительного управляющего сигнала соединены с выходом первого задатчика постоянного значения (ЗПЗ1), при этом входом блока формирования дополнительного управляющего сигнала является вход блока формирования значения угла на втором участке, соединенный со вторым входом блока формирования параметров дополнительного управляющего сигнала, а выходом - выход блока вычисления дополнительного управляющего сигнала.
5. Система по п.4, отличающаяся тем, что блок формирования параметров дополнительного управляющего сигнала выполнен в виде последовательно соединенных первого квадратора (К1) и первого делителя (Д1), последовательно соединенных второго задатчика постоянного значения (ЗПЗ2) и первого множительного устройства (МУ1), последовательно соединенных второго делителя (Д2) и первого сумматора (СУМ1), последовательно соединенных третьего делителя (Д3) и инверсного входа второго сумматора (СУМ2), последовательно соединенных третьего задатчика постоянного значения (ЗПЗ3) и второго множительного устройства (МУ2), причем выход Д2 соединен со вторым входом СУМ2, выход Д3 соединен со вторым входом СУМ1, выход МУ2 - со вторым входом Д1, первым входом блока формирования параметров дополнительного управляющего сигнала являются входы Д3 и МУ2, вторым входом - вход Д2, третьим входом - входы МУ1, К1, Д2, Д3, первым выходом - выход Д1, вторым выходом - выход МУ1, третьим выходом - выход СУМ1, четвертым выходом - выход СУМ2.
6. Система по п.4, отличающаяся тем, что блок вычисления дополнительного управляющего сигнала выполнен в виде последовательно соединенных задатчика времени, первого элемента сравнения (ЭС1), второго квадратора (К2), третьего множительного устройства (МУ3) и третьего сумматора (СУМ3), второй вход которого соединен с выходом четвертого множительного устройства (МУ4), входом соединенного с первым выходом ЭС1, а также пятого множительного устройства (МУЗ), первый вход которого соединен со вторым выходом ЭС1, при этом первым входом блока вычисления дополнительного управляющего сигнала является второй вход МУЗ, вторым входом - второй вход МУ4, третьим входом - вход задатчика времени, четвертым входом - второй вход ЭС1, пятым входом - второй вход МУ5, а выходом блока - выход СУМЗ и выход МУ5.
7. Система по п.4, отличающаяся тем, что блок формирования значения угла на втором участке выполнен в виде последовательно соединенных четвертого задатчика постоянного значения (ЗПЗ4), второго элемента сравнения (ЭС2), пятого задатчика постоянного значения (ЗПЗ5) и последовательно соединенных шестого множительного устройства (МУ6), первым входом соединенного с вторым выходом ЭС2, и четвертого сумматора (СУМ4), вторые входы которых соединены соответственно с выходами шестого и седьмого задатчиков постоянного значения (ЗПЗ6) и (ЗПЗ7), при этом входом блока является первый вход ЭС2, а выходом - выход СУМ4 и выход ЗПЗ5.
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
| СПОСОБ ЗАЩИТЫ БОЕВОЙ МАШИНЫ ОТ СРЕДСТВ ВОЗДУШНОГО НАПАДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2087832C1 |
| АЛМАЗНЫЙ ИНСТРУМЕНТ ДЛЯ ПРАВКИ ШЛИФОВАЛЬНЫХ КРУГОВ | 2007 |
|
RU2354532C1 |
| СПОСОБ ПОЛУЧЕНИЯ АСБЕСТО-БИТУМНОЙ ЭМУЛЬСИИ | 2000 |
|
RU2158244C1 |
| DE 3332795 A1, 28.03.1985. | |||

